
File size: 7,052 Bytes
1f60f8a | 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 | ---
language:
- en
license: apache-2.0
base_model: Qwen/Qwen3.5-0.8B
datasets:
- google/MapTrace
pipeline_tag: image-text-to-text
tags:
- qwen3.5
- vision-language
- path-planning
- maptrace
- fine-tuned
- partial-fine-tuning
---
# Qwen3.5-0.8B — MapTrace Path Planning (Partial Fine-Tune)
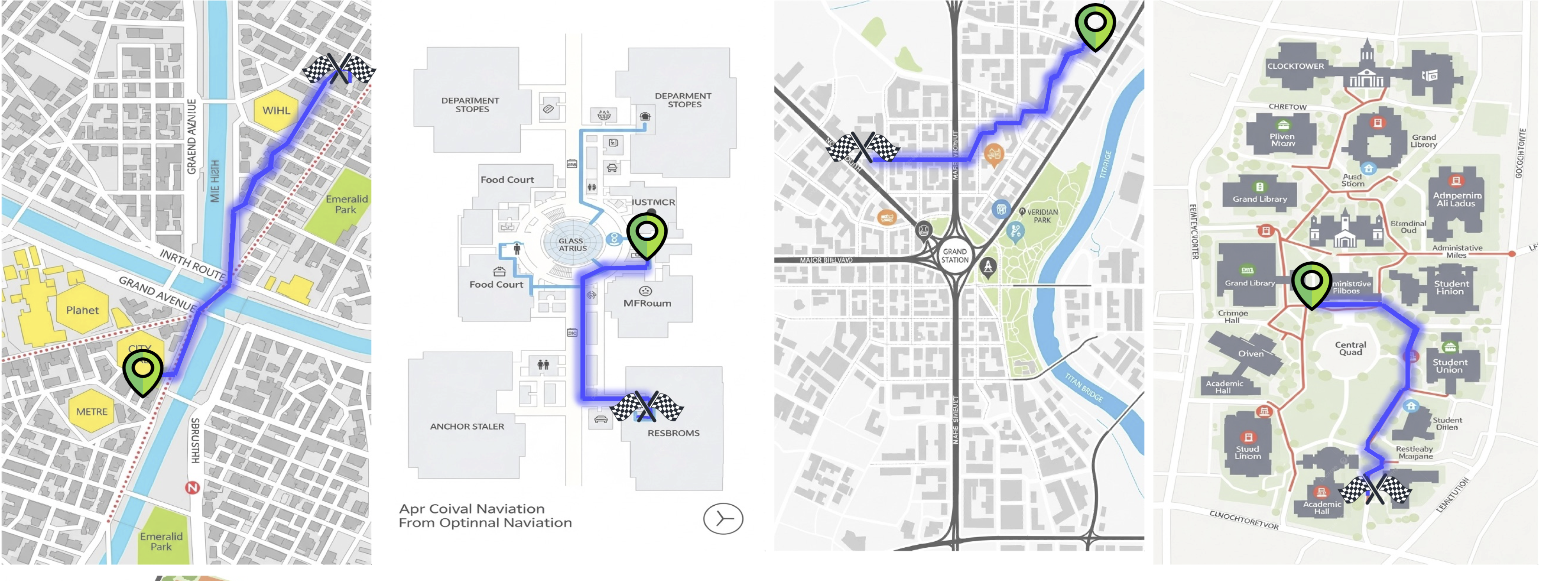
This model is a **Partial Fine-Tune** of [`Qwen/Qwen3.5-0.8B`](https://huggingface.co/Qwen/Qwen3.5-0.8B) specifically trained for **visual path planning** on indoor and outdoor maps. Given an image of a traversable map with marked start (green) and end (red) locations, the model predicts a sequence of normalized (x, y) waypoints that connect the two locations while staying on traversable paths.
---
## 🗺️ Task Description
**MapTrace** is a visual navigation benchmark that requires a model to:
1. Understand a map image with a marked **start location (green dot)** and **end location (red dot)**.
2. Trace a realistic, traversable path between the two points.
3. Output the path as a list of **normalized (x, y) coordinates**: `[(x1, y1), (x2, y2), ...]`
### Example Input
```
You are provided an image of a path with a start location denoted in green
and an end location denoted in red.
The normalized xy-coordinates of the start location are (0.77, 0.47) and
of the end location (0.54, 0.54).
Output a list of normalized coordinates in the form of a list [(x1,y1), (x2,y2)...]
of the path between the start and end location.
Ensure that the path follows the traversable locations of the map.
```
### Example Output
```python
[(0.7695, 0.4727), (0.7344, 0.5156), (0.5898, 0.5234), (0.543, 0.543)]
```
---
## 🏋️ Training Strategy
The model was trained using a **Partial Fine-Tuning** approach to balance quality and computational efficiency:
| Setting | Value |
|---|---|
| **Base Model** | `Qwen/Qwen3.5-0.8B` |
| **Strategy** | Partial Fine-Tuning (Last 6 of 24 layers) |
| **Dataset** | `google/MapTrace (maptrace_20k subset)` |
| **Vision Encoder** | ✅ Trained (not frozen) |
| **Effective Batch Size** | 128 (`1 per GPU × 32 grad_accum × 4 GPUs`) |
| **Learning Rate** | `1e-5` with Warmup (100 steps) |
| **Max Sequence Length** | `2048` tokens |
| **Mixed Precision** | `bf16` |
| **Gradient Checkpointing** | ✅ Enabled |
| **Image Resolution Cap** | `1024 × 768` pixels (VRAM safety) |
| **Hardware** | 4× NVIDIA RTX 4090 24GB |
### Why Partial Fine-Tuning?
Instead of full fine-tuning or LoRA, we opted for **unlocking the last 6 transformer layers and the visual encoder** for gradient updates. This approach:
- Preserves the model's general language understanding from the foundation weights.
- Directly adapts the "reasoning" layers to the spatial coordinate prediction task.
- Avoids LoRA's approximation error — weights are modified directly.
### Training Highlights
- Resumed from `checkpoint-50 → checkpoint-100 → final` across multiple sessions.
- VRAM stability was achieved by setting `max_pixels=1024x768` as a safety cap, preventing OOM spikes from high-resolution map images.
- Loss masking was applied so the model only learns from the **assistant's coordinate response**, not the user's prompt or image tokens.
- Final **Token Accuracy: ~~84.5%**, Final **Loss: ~0.37**.
---
## 🚀 Inference
```python
import torch
from transformers import AutoModelForImageTextToText, AutoProcessor
from PIL import Image
model_id = "TurkishCodeMan/Qwen3.5-0.8B-MapTrace-PartialFT"
processor = AutoProcessor.from_pretrained(model_id, trust_remote_code=True)
model = AutoModelForImageTextToText.from_pretrained(
model_id,
torch_dtype=torch.bfloat16,
device_map="auto",
trust_remote_code=True,
)
model.eval()
def predict_path(image_path: str, start_xy: tuple, end_xy: tuple) -> str:
image = Image.open(image_path).convert("RGB")
prompt_text = (
f"You are provided an image of a path with a start location denoted in green "
f"and an end location denoted in red. \n"
f"The normalized xy-coordinates of the start location are ({start_xy[0]}, {start_xy[1]}) "
f"and of the end location ({end_xy[0]}, {end_xy[1]}). \n"
f"Output a list of normalized coordinates in the form of a list [(x1,y1), (x2,y2)...] "
f"of the path between the start and end location. \n"
f"Ensure that the path follows the traversable locations of the map."
)
messages = [
{
"role": "user",
"content": [
{"type": "image"},
{"type": "text", "text": prompt_text},
],
}
]
text = processor.apply_chat_template(
messages,
tokenize=False,
add_generation_prompt=True,
)
inputs = processor(
text=[text],
images=[image],
return_tensors="pt",
padding=True,
min_pixels=256 * 28 * 28,
max_pixels=1024 * 768,
).to(model.device)
with torch.no_grad():
generated_ids = model.generate(
**inputs,
max_new_tokens=512,
do_sample=False,
temperature=0.0,
)
output = processor.decode(
generated_ids[0][inputs.input_ids.shape[1]:],
skip_special_tokens=True
)
return output.strip()
# Example usage
result = predict_path(
image_path="map.png",
start_xy=(0.7695, 0.4727),
end_xy=(0.543, 0.543),
)
print(result)
# Expected: [(0.7695, 0.4727), (0.7344, 0.5156), (0.5898, 0.5234), (0.543, 0.543)]
```
> **Important:** Use the **raw prompt format** shown above (not `apply_chat_template` with `add_generation_prompt=True`). Since the training data did not include `<think>` tokens, applying the default Qwen3.5 template would inject thinking tags and cause degraded output.
---
## 📊 Training Metrics
| Epoch | Step | Loss | Token Accuracy | Learning Rate |
|---|---|---|---|---|
| 0.50 | 71 | 0.5044 | 70.35% | 6.9e-06 |
...
| 0.71 | 100 | 0.4614 | 81.57% | 9.9e-06 |
| 0.85 | 120 | 0.4294 | 82.71% | 9.73e-06 |
| 1.00 | 141 | 0.4147 | 83.29% | 9.39e-06 |
| 1.42 | 200 | 0.3841 | 84.32% | 4.31e-06 |
| 1.50 | 211 | 0.3741 | 84.50% | 3.47e-06 |
| 1.63 | 224 | 0.3669 | 84.82% | 1.95e-06 |
---
## 🗂️ Dataset
The model was trained on [google/MapTrace](https://huggingface.co/datasets/google/MapTrace) (the `maptrace_20k` subset), a dataset containing 20,000 map images paired with path annotations from start to end locations.
---
## ⚠️ Limitations
- **Map-Specific:** The model is trained exclusively for top-down map images; it is not a general path planner.
- **Coordinate Precision:** Predictions are in normalized [0, 1] space and may have small pixel-level deviations.
- **Resolution Cap:** Images larger than `1024×768` will be downscaled to this resolution during inference to match training conditions.
---
## 📜 License
This model is released under the [Apache 2.0](https://www.apache.org/licenses/LICENSE-2.0) license, consistent with the base model.
|