Datasets:

Languages:
English
Size:
10K<n<100K
ArXiv:
Tags:
sports-analytics
computer-vision
object-tracking
trajectory-prediction
ball-tracking
racket-pose-estimation
License:
File size: 8,166 Bytes
ced41e6 3f95dc0 ced41e6 85157ca ced41e6 3f95dc0 ced41e6 3f95dc0 ced41e6 3f95dc0 ced41e6 3f95dc0 ced41e6 | 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 | ---
license: mit
language:
- en
pretty_name: RacketVision Dataset
size_categories:
- 10K<n<100K
task_categories:
- object-detection
- video-classification
tags:
- sports-analytics
- computer-vision
- object-tracking
- trajectory-prediction
- ball-tracking
- racket-pose-estimation
- badminton
- table-tennis
- tennis
- racket-sports
---
# RacketVision Dataset
[](https://arxiv.org/abs/2511.17045)
[](https://aaai.org/)
[](https://github.com/OrcustD/RacketVision/)
[](https://huggingface.co/datasets/linfeng302/RacketVision)
[](https://huggingface.co/linfeng302/RacketVision-Models)
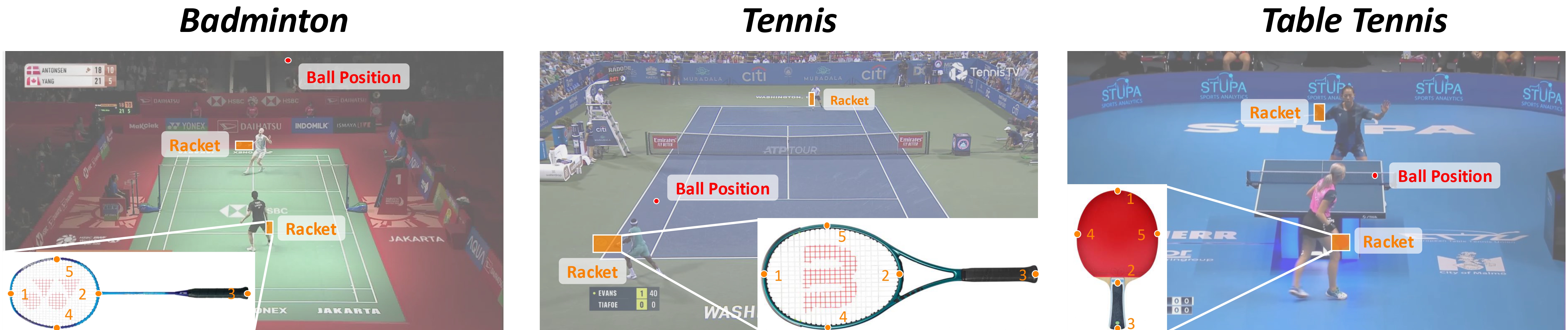
**RacketVision** is a large-scale, multi-sport dataset and benchmark for advancing computer vision in sports analytics, covering **badminton**, **table tennis**, and **tennis**. It is the first dataset to provide large-scale, fine-grained annotations for racket pose alongside traditional ball positions, enabling research into complex human-object interactions. The benchmark tackles three interconnected tasks: fine-grained **ball tracking**, articulated **racket pose estimation**, and predictive ball **trajectory forecasting**.
## Using this Hub repository
This dataset is distributed as **static files** (videos, CSV, JSON, PKL). Download it with the Hugging Face CLI, then follow the [project README](https://github.com/OrcustD/RacketVision/blob/main/README.md) for environment setup and training:
```bash
# Official code layout (clone https://github.com/OrcustD/RacketVision ): from repo root
hf download linfeng302/RacketVision --repo-type dataset --local-dir source/data
# Stand-alone data folder only (you must point module configs or --data_root to this directory)
hf download linfeng302/RacketVision --repo-type dataset --local-dir data
```
The in-browser Dataset Viewer may not fully load all assets: COCO detection and pose JSON files use different annotation schemas, so they are not merged into a single `datasets`-style table. Use the files on disk as documented below.
## Directory Layout
```
data/
├── annotations/
│ └── dataset_info.json # Global dataset metadata (clip list, splits)
│
├── info/ # COCO-format annotations for RacketPose
│ ├── train_det_coco.json # Detection: bbox annotations (train split)
│ ├── val_det_coco.json
│ ├── test_det_coco.json
│ ├── train_pose_coco.json # Pose: keypoint annotations (train split)
│ ├── val_pose_coco.json
│ └── test_pose_coco.json
│
├── <sport>/ # badminton / tabletennis / tennis
│ ├── videos/
│ │ └── <match>_<rally>.mp4 # Raw video clips
│ ├── all/
│ │ └── <match>/
│ │ ├── csv/<rally>_ball.csv # Ball ground truth annotations
│ │ └── racket/<rally>/*.json # Racket ground truth annotations
│ ├── interp_ball/ # Interpolated ball trajectories (for rebuilding TrajPred data)
│ ├── merged_racket/ # Merged racket predictions (for rebuilding TrajPred data)
│ └── info/
│ ├── metainfo.json # Sport-specific metadata
│ ├── train.json # [[match_id, rally_id], ...] for training
│ ├── val.json # Validation split
│ └── test.json # Test split
│
└── data_traj/ # Pre-built trajectory prediction datasets
├── ball_racket_<sport>_h20_f5.pkl # Short-horizon: 20 history → 5 future
└── ball_racket_<sport>_h80_f20.pkl # Long-horizon: 80 history → 20 future
```
**Local preprocessing (required for BallTrack):** after download, generate per-match `frame/<rally>/` (JPG frames) and `median.npz` from the videos using `DataPreprocess/extract_frames.py` and `DataPreprocess/create_median.py`. These are omitted from the Hub release to save space; see the [project README](https://github.com/OrcustD/RacketVision/blob/main/README.md).
## Data Formats
### Ball Annotations (`csv/<rally>_ball.csv`)
| Column | Type | Description |
|--------|------|-------------|
| Frame | int | 0-indexed frame number |
| X | int | Ball center X in pixels (1920×1080) |
| Y | int | Ball center Y in pixels |
| Visibility | int | 1 = visible, 0 = not visible |
### Racket Annotations (`racket/<rally>/<frame_id>.json`)
Per-frame JSON with a list of racket instances, each containing:
```json
{
"category": "badminton_racket",
"bbox_xywh": [x, y, w, h],
"keypoints": [[x1, y1, vis], [x2, y2, vis], ...]
}
```
**5 keypoints** are defined: `top`, `bottom`, `handle`, `left`, `right`.
### COCO Annotations (`info/*_coco.json`)
Standard COCO format used by RacketPose for training/evaluation:
- **Detection** (`*_det_coco.json`): 3 categories — `badminton_racket`, `tabletennis_racket`, `tennis_racket`.
- **Pose** (`*_pose_coco.json`): 1 category (`racket`) with 5 keypoints.
### Trajectory PKL (`data_traj/*.pkl`)
Pickle files containing pre-processed sliding-window samples. Each PKL has:
```python
{
'train_samples': [...], # List of sample dicts
'test_samples': [...],
'train_dataset': ..., # Legacy Dataset objects
'test_dataset': ...,
'metadata': {
'history_len': 80,
'future_len': 20,
'sports': ['badminton'],
'total_samples': N,
'train_size': ...,
'test_size': ...
}
}
```
Each sample dict:
```python
{
'history': np.array(shape=(H, 2)), # Normalised [X, Y] in [0, 1]
'future': np.array(shape=(F, 2)),
'history_rkt': np.array(shape=(H, 10)), # 5 keypoints × 2 coords, normalised
'future_rkt': np.array(shape=(F, 10)),
'sport': str,
'match': str,
'sequence': str,
'start_frame': int
}
```
**Normalisation**: Ball coordinates are divided by (1920, 1080). Racket keypoints are divided by the same values.
### Split Files (`<sport>/info/train.json`)
JSON list of `[match_id, rally_id]` pairs:
```json
[["match1", "000"], ["match1", "001"], ...]
```
## Generating Data from Scratch
If you have the raw videos, use `DataPreprocess/` scripts in the [code repository](https://github.com/OrcustD/RacketVision/) to prepare all intermediate files:
```bash
cd DataPreprocess
# 1. Extract video frames to JPG
python extract_frames.py --data_root ../data --sport badminton
# 2. Compute median background frame
python create_median.py --data_root ../data --sport badminton
# 3. Generate dataset_info.json and per-sport split files
python generate_dataset_info.py --data_root ../data
# 4. Generate COCO annotations for RacketPose
python generate_coco_annotations.py --data_root ../data
```
## Generating Trajectory Data
After running BallTrack and RacketPose inference, build `data_traj/` PKLs:
```bash
cd TrajPred
# Interpolate short gaps in ball predictions
python linear_interpolate_ball_traj.py --data_root ../data --sport badminton
# Merge racket predictions with ground truth annotations
python merge_gt_with_predictions.py --data_root ../data --sport badminton
# Build PKL dataset
python build_dataset.py --data_root ../data --sport badminton --history 80 --future 20
```
## Citation
If you find this work useful, please consider citing:
```bibtex
@inproceedings{dong2026racket,
title={Racket Vision: A Multiple Racket Sports Benchmark for Unified Ball and Racket Analysis},
author={Dong, Linfeng and Yang, Yuchen and Wu, Hao and Wang, Wei and Hou, Yuenan and Zhong, Zhihang and Sun, Xiao},
booktitle={Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)},
year={2026}
}
```
|