+  +
+
+
+[](https://pypi.org/project/mmdet)
+[](https://mmdetection.readthedocs.io/en/latest/)
+[](https://github.com/open-mmlab/mmdetection/actions)
+[](https://codecov.io/gh/open-mmlab/mmdetection)
+[](https://github.com/open-mmlab/mmdetection/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://openxlab.org.cn/apps?search=mmdet)
+
+[📘Documentation](https://mmdetection.readthedocs.io/en/latest/) |
+[🛠️Installation](https://mmdetection.readthedocs.io/en/latest/get_started.html) |
+[👀Model Zoo](https://mmdetection.readthedocs.io/en/latest/model_zoo.html) |
+[🆕Update News](https://mmdetection.readthedocs.io/en/latest/notes/changelog.html) |
+[🚀Ongoing Projects](https://github.com/open-mmlab/mmdetection/projects) |
+[🤔Reporting Issues](https://github.com/open-mmlab/mmdetection/issues/new/choose)
+
+
+
+
+
+[](https://pypi.org/project/mmdet)
+[](https://mmdetection.readthedocs.io/en/latest/)
+[](https://github.com/open-mmlab/mmdetection/actions)
+[](https://codecov.io/gh/open-mmlab/mmdetection)
+[](https://github.com/open-mmlab/mmdetection/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://openxlab.org.cn/apps?search=mmdet)
+
+[📘Documentation](https://mmdetection.readthedocs.io/en/latest/) |
+[🛠️Installation](https://mmdetection.readthedocs.io/en/latest/get_started.html) |
+[👀Model Zoo](https://mmdetection.readthedocs.io/en/latest/model_zoo.html) |
+[🆕Update News](https://mmdetection.readthedocs.io/en/latest/notes/changelog.html) |
+[🚀Ongoing Projects](https://github.com/open-mmlab/mmdetection/projects) |
+[🤔Reporting Issues](https://github.com/open-mmlab/mmdetection/issues/new/choose)
+
+
+
+
+ OpenMMLab website
+
+
+ HOT
+
+
+
+ OpenMMLab platform
+
+
+ TRY IT OUT
+
+
+
+
+
+English | [简体中文](README_zh-CN.md)
+
+
+
+
+
+
 +
+ 




+ +
+
+
+## Introduction
+
+MMDetection is an open source object detection toolbox based on PyTorch. It is
+a part of the [OpenMMLab](https://openmmlab.com/) project.
+
+The main branch works with **PyTorch 1.8+**.
+
+ +
+
+
+
+
+
+Apart from MMDetection, we also released [MMEngine](https://github.com/open-mmlab/mmengine) for model training and [MMCV](https://github.com/open-mmlab/mmcv) for computer vision research, which are heavily depended on by this toolbox.
+
+## What's New
+
+💎 **We have released the pre-trained weights for MM-Grounding-DINO Swin-B and Swin-L, welcome to try and give feedback.**
+
+### Highlight
+
+**v3.3.0** was released in 5/1/2024:
+
+**[MM-Grounding-DINO: An Open and Comprehensive Pipeline for Unified Object Grounding and Detection](https://arxiv.org/abs/2401.02361)**
+
+Grounding DINO is a grounding pre-training model that unifies 2d open vocabulary object detection and phrase grounding, with wide applications. However, its training part has not been open sourced. Therefore, we propose MM-Grounding-DINO, which not only serves as an open source replication version of Grounding DINO, but also achieves significant performance improvement based on reconstructed data types, exploring different dataset combinations and initialization strategies. Moreover, we conduct evaluations from multiple dimensions, including OOD, REC, Phrase Grounding, OVD, and Fine-tune, to fully excavate the advantages and disadvantages of Grounding pre-training, hoping to provide inspiration for future work.
+
+code: [mm_grounding_dino/README.md](configs/mm_grounding_dino/README.md)
+
+Major features
+ +- **Modular Design** + + We decompose the detection framework into different components and one can easily construct a customized object detection framework by combining different modules. + +- **Support of multiple tasks out of box** + + The toolbox directly supports multiple detection tasks such as **object detection**, **instance segmentation**, **panoptic segmentation**, and **semi-supervised object detection**. + +- **High efficiency** + + All basic bbox and mask operations run on GPUs. The training speed is faster than or comparable to other codebases, including [Detectron2](https://github.com/facebookresearch/detectron2), [maskrcnn-benchmark](https://github.com/facebookresearch/maskrcnn-benchmark) and [SimpleDet](https://github.com/TuSimple/simpledet). + +- **State of the art** + + The toolbox stems from the codebase developed by the *MMDet* team, who won [COCO Detection Challenge](http://cocodataset.org/#detection-leaderboard) in 2018, and we keep pushing it forward. + The newly released [RTMDet](configs/rtmdet) also obtains new state-of-the-art results on real-time instance segmentation and rotated object detection tasks and the best parameter-accuracy trade-off on object detection. + +
+ +
+
+
+We are excited to announce our latest work on real-time object recognition tasks, **RTMDet**, a family of fully convolutional single-stage detectors. RTMDet not only achieves the best parameter-accuracy trade-off on object detection from tiny to extra-large model sizes but also obtains new state-of-the-art performance on instance segmentation and rotated object detection tasks. Details can be found in the [technical report](https://arxiv.org/abs/2212.07784). Pre-trained models are [here](configs/rtmdet).
+
+[](https://paperswithcode.com/sota/real-time-instance-segmentation-on-mscoco?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-dota-1?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-hrsc2016?p=rtmdet-an-empirical-study-of-designing-real)
+
+| Task | Dataset | AP | FPS(TRT FP16 BS1 3090) |
+| ------------------------ | ------- | ------------------------------------ | ---------------------- |
+| Object Detection | COCO | 52.8 | 322 |
+| Instance Segmentation | COCO | 44.6 | 188 |
+| Rotated Object Detection | DOTA | 78.9(single-scale)/81.3(multi-scale) | 121 |
+
+
+ +
+
+
+## Installation
+
+Please refer to [Installation](https://mmdetection.readthedocs.io/en/latest/get_started.html) for installation instructions.
+
+## Getting Started
+
+Please see [Overview](https://mmdetection.readthedocs.io/en/latest/get_started.html) for the general introduction of MMDetection.
+
+For detailed user guides and advanced guides, please refer to our [documentation](https://mmdetection.readthedocs.io/en/latest/):
+
+- User Guides
+
+
+
+
+ - [Train & Test](https://mmdetection.readthedocs.io/en/latest/user_guides/index.html#train-test)
+ - [Learn about Configs](https://mmdetection.readthedocs.io/en/latest/user_guides/config.html)
+ - [Inference with existing models](https://mmdetection.readthedocs.io/en/latest/user_guides/inference.html)
+ - [Dataset Prepare](https://mmdetection.readthedocs.io/en/latest/user_guides/dataset_prepare.html)
+ - [Test existing models on standard datasets](https://mmdetection.readthedocs.io/en/latest/user_guides/test.html)
+ - [Train predefined models on standard datasets](https://mmdetection.readthedocs.io/en/latest/user_guides/train.html)
+ - [Train with customized datasets](https://mmdetection.readthedocs.io/en/latest/user_guides/train.html#train-with-customized-datasets)
+ - [Train with customized models and standard datasets](https://mmdetection.readthedocs.io/en/latest/user_guides/new_model.html)
+ - [Finetuning Models](https://mmdetection.readthedocs.io/en/latest/user_guides/finetune.html)
+ - [Test Results Submission](https://mmdetection.readthedocs.io/en/latest/user_guides/test_results_submission.html)
+ - [Weight initialization](https://mmdetection.readthedocs.io/en/latest/user_guides/init_cfg.html)
+ - [Use a single stage detector as RPN](https://mmdetection.readthedocs.io/en/latest/user_guides/single_stage_as_rpn.html)
+ - [Semi-supervised Object Detection](https://mmdetection.readthedocs.io/en/latest/user_guides/semi_det.html)
+ - [Useful Tools](https://mmdetection.readthedocs.io/en/latest/user_guides/index.html#useful-tools)
+
+
+
+- Advanced Guides
+
+
+
+ - [Basic Concepts](https://mmdetection.readthedocs.io/en/latest/advanced_guides/index.html#basic-concepts)
+ - [Component Customization](https://mmdetection.readthedocs.io/en/latest/advanced_guides/index.html#component-customization)
+ - [How to](https://mmdetection.readthedocs.io/en/latest/advanced_guides/index.html#how-to)
+
+
+
+We also provide object detection colab tutorial [](demo/MMDet_Tutorial.ipynb) and instance segmentation colab tutorial [](demo/MMDet_InstanceSeg_Tutorial.ipynb).
+
+To migrate from MMDetection 2.x, please refer to [migration](https://mmdetection.readthedocs.io/en/latest/migration.html).
+
+## Overview of Benchmark and Model Zoo
+
+Results and models are available in the [model zoo](docs/en/model_zoo.md).
+
+
+ Architectures
+
+
+ Components
+
+| + Backbones + | ++ Necks + | ++ Loss + | ++ Common + | +
+
|
+ + + | ++ + | ++ + | +
+
+
+
+
+[](https://pypi.org/project/mmdet)
+[](https://mmdetection.readthedocs.io/en/latest/)
+[](https://github.com/open-mmlab/mmdetection/actions)
+[](https://codecov.io/gh/open-mmlab/mmdetection)
+[](https://github.com/open-mmlab/mmdetection/blob/main/LICENSE)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://github.com/open-mmlab/mmdetection/issues)
+[](https://openxlab.org.cn/apps?search=mmdet)
+
+[📘使用文档](https://mmdetection.readthedocs.io/zh_CN/latest/) |
+[🛠️安装教程](https://mmdetection.readthedocs.io/zh_CN/latest/get_started.html) |
+[👀模型库](https://mmdetection.readthedocs.io/zh_CN/latest/model_zoo.html) |
+[🆕更新日志](https://mmdetection.readthedocs.io/en/latest/notes/changelog.html) |
+[🚀进行中的项目](https://github.com/open-mmlab/mmdetection/projects) |
+[🤔报告问题](https://github.com/open-mmlab/mmdetection/issues/new/choose)
+
+
+
+
+ OpenMMLab 官网
+
+
+ HOT
+
+
+
+ OpenMMLab 开放平台
+
+
+ TRY IT OUT
+
+
+
+
+
+[English](README.md) | 简体中文
+
+
+
+
+
+
+
+
+
+## 简介
+
+MMDetection 是一个基于 PyTorch 的目标检测开源工具箱。它是 [OpenMMLab](https://openmmlab.com/) 项目的一部分。
+
+主分支代码目前支持 PyTorch 1.8 及其以上的版本。
+
+
+
+
+
+
+除了 MMDetection 之外,我们还开源了深度学习训练库 [MMEngine](https://github.com/open-mmlab/mmengine) 和计算机视觉基础库 [MMCV](https://github.com/open-mmlab/mmcv),它们是 MMDetection 的主要依赖。
+
+## 最新进展
+
+💎 **我们已经发布了 MM-Grounding-DINO Swin-B 和 Swin-L 预训练权重,欢迎试用和反馈.**
+
+### 亮点
+
+**v3.3.0** 版本已经在 2024.1.5 发布:
+
+**MM-Grounding-DINO: 轻松涨点,数据到评测全面开源**
+
+Grounding DINO 是一个统一了 2d 开放词汇目标检测和 Phrase Grounding 的检测预训练模型,应用广泛,但是其训练部分并未开源,为此提出了 MM-Grounding-DINO。其不仅作为 Grounding DINO 的开源复现版,MM-Grounding-DINO 基于重新构建的数据类型出发,在探索了不同数据集组合和初始化策略基础上实现了 Grounding DINO 的性能极大提升,并且从多个维度包括 OOD、REC、Phrase Grounding、OVD 和 Finetune 等方面进行评测,充分挖掘 Grounding 预训练优缺点,希望能为后续工作提供启发。
+
+arxiv 技术报告:https://arxiv.org/abs/2401.02361
+
+代码地址: [mm_grounding_dino/README.md](configs/mm_grounding_dino/README.md)
+
+主要特性
+ +- **模块化设计** + + MMDetection 将检测框架解耦成不同的模块组件,通过组合不同的模块组件,用户可以便捷地构建自定义的检测模型 + +- **支持多种检测任务** + + MMDetection 支持了各种不同的检测任务,包括**目标检测**,**实例分割**,**全景分割**,以及**半监督目标检测**。 + +- **速度快** + + 基本的框和 mask 操作都实现了 GPU 版本,训练速度比其他代码库更快或者相当,包括 [Detectron2](https://github.com/facebookresearch/detectron2), [maskrcnn-benchmark](https://github.com/facebookresearch/maskrcnn-benchmark) 和 [SimpleDet](https://github.com/TuSimple/simpledet)。 + +- **性能高** + + MMDetection 这个算法库源自于 COCO 2018 目标检测竞赛的冠军团队 *MMDet* 团队开发的代码,我们在之后持续进行了改进和提升。 + 新发布的 [RTMDet](configs/rtmdet) 还在实时实例分割和旋转目标检测任务中取得了最先进的成果,同时也在目标检测模型中取得了最佳的的参数量和精度平衡。 + +
+
+
+
+我们很高兴向大家介绍我们在实时目标识别任务方面的最新成果 RTMDet,包含了一系列的全卷积单阶段检测模型。 RTMDet 不仅在从 tiny 到 extra-large 尺寸的目标检测模型上实现了最佳的参数量和精度的平衡,而且在实时实例分割和旋转目标检测任务上取得了最先进的成果。 更多细节请参阅[技术报告](https://arxiv.org/abs/2212.07784)。 预训练模型可以在[这里](configs/rtmdet)找到。
+
+[](https://paperswithcode.com/sota/real-time-instance-segmentation-on-mscoco?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-dota-1?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-hrsc2016?p=rtmdet-an-empirical-study-of-designing-real)
+
+| Task | Dataset | AP | FPS(TRT FP16 BS1 3090) |
+| ------------------------ | ------- | ------------------------------------ | ---------------------- |
+| Object Detection | COCO | 52.8 | 322 |
+| Instance Segmentation | COCO | 44.6 | 188 |
+| Rotated Object Detection | DOTA | 78.9(single-scale)/81.3(multi-scale) | 121 |
+
+
+
+
+
+## 安装
+
+请参考[快速入门文档](https://mmdetection.readthedocs.io/zh_CN/latest/get_started.html)进行安装。
+
+## 教程
+
+请阅读[概述](https://mmdetection.readthedocs.io/zh_CN/latest/get_started.html)对 MMDetection 进行初步的了解。
+
+为了帮助用户更进一步了解 MMDetection,我们准备了用户指南和进阶指南,请阅读我们的[文档](https://mmdetection.readthedocs.io/zh_CN/latest/):
+
+- 用户指南
+
+
+
+
+ - [训练 & 测试](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/index.html#train-test)
+ - [学习配置文件](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/config.html)
+ - [使用已有模型在标准数据集上进行推理](https://mmdetection.readthedocs.io/en/latest/user_guides/inference.html)
+ - [数据集准备](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/dataset_prepare.html)
+ - [测试现有模型](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/test.html)
+ - [在标准数据集上训练预定义的模型](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/train.html)
+ - [在自定义数据集上进行训练](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/train.html#train-with-customized-datasets)
+ - [在标准数据集上训练自定义模型](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/new_model.html)
+ - [模型微调](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/finetune.html)
+ - [提交测试结果](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/test_results_submission.html)
+ - [权重初始化](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/init_cfg.html)
+ - [将单阶段检测器作为 RPN](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/single_stage_as_rpn.html)
+ - [半监督目标检测](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/semi_det.html)
+ - [实用工具](https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/index.html#useful-tools)
+
+
+
+- 进阶指南
+
+
+
+ - [基础概念](https://mmdetection.readthedocs.io/zh_CN/latest/advanced_guides/index.html#basic-concepts)
+ - [组件定制](https://mmdetection.readthedocs.io/zh_CN/latest/advanced_guides/index.html#component-customization)
+ - [How to](https://mmdetection.readthedocs.io/zh_CN/latest/advanced_guides/index.html#how-to)
+
+
+
+我们提供了检测的 colab 教程 [](demo/MMDet_Tutorial.ipynb) 和 实例分割的 colab 教程 [](demo/MMDet_Tutorial.ipynb)
+
+同时,我们还提供了 [MMDetection 中文解读文案汇总](docs/zh_cn/article.md)
+
+若需要将2.x版本的代码迁移至新版,请参考[迁移文档](https://mmdetection.readthedocs.io/en/latest/migration.html)。
+
+## 基准测试和模型库
+
+测试结果和模型可以在[模型库](docs/zh_cn/model_zoo.md)中找到。
+
+
+ 算法架构
+
+
+ 模块组件
+
+| + Backbones + | ++ Necks + | ++ Loss + | ++ Common + | +
+
|
+ + + | ++ + | ++ + | +
+
 +
+
+
+我们会在 OpenMMLab 社区为大家
+
+- 📢 分享 AI 框架的前沿核心技术
+- 💻 解读 PyTorch 常用模块源码
+- 📰 发布 OpenMMLab 的相关新闻
+- 🚀 介绍 OpenMMLab 开发的前沿算法
+- 🏃 获取更高效的问题答疑和意见反馈
+- 🔥 提供与各行各业开发者充分交流的平台
+
+干货满满 📘,等你来撩 💗,OpenMMLab 社区期待您的加入 👬
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..57f657aa67f34830515f410425eccc96cb065af4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_instance.py
@@ -0,0 +1,53 @@
+# dataset settings
+dataset_type = 'ADE20KInstanceDataset'
+data_root = 'data/ADEChallengeData2016/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/ADEChallengeData2016/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(2560, 640), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='ade20k_instance_val.json',
+ data_prefix=dict(img='images/validation'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'ade20k_instance_val.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_panoptic.py b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..7be5ddd7f0732193f4f92bc49e52493602928162
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_panoptic.py
@@ -0,0 +1,38 @@
+# dataset settings
+dataset_type = 'ADE20KPanopticDataset'
+data_root = 'data/ADEChallengeData2016/'
+
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(2560, 640), keep_ratio=True),
+ dict(type='LoadPanopticAnnotations', backend_args=backend_args),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=0,
+ persistent_workers=False,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='ade20k_panoptic_val.json',
+ data_prefix=dict(img='images/validation/', seg='ade20k_panoptic_val/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoPanopticMetric',
+ ann_file=data_root + 'ade20k_panoptic_val.json',
+ seg_prefix=data_root + 'ade20k_panoptic_val/',
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_semantic.py b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_semantic.py
new file mode 100644
index 0000000000000000000000000000000000000000..522a775704182ededaa36f318cd1eb185784918f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/ade20k_semantic.py
@@ -0,0 +1,48 @@
+dataset_type = 'ADE20KSegDataset'
+data_root = 'data/ADEChallengeData2016/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/ADEChallengeData2016/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(2048, 512), keep_ratio=True),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=False,
+ with_mask=False,
+ with_seg=True,
+ reduce_zero_label=True),
+ dict(
+ type='PackDetInputs', meta_keys=('img_path', 'ori_shape', 'img_shape'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(
+ img_path='images/validation',
+ seg_map_path='annotations/validation'),
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(type='SemSegMetric', iou_metrics=['mIoU'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..caeba6bfcd26d8954fc9d499446e93323e372959
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_detection.py
@@ -0,0 +1,84 @@
+# dataset settings
+dataset_type = 'CityscapesDataset'
+data_root = 'data/cityscapes/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/segmentation/cityscapes/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/segmentation/',
+# 'data/': 's3://openmmlab/datasets/segmentation/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=[(2048, 800), (2048, 1024)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(2048, 1024), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='RepeatDataset',
+ times=8,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instancesonly_filtered_gtFine_train.json',
+ data_prefix=dict(img='leftImg8bit/train/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instancesonly_filtered_gtFine_val.json',
+ data_prefix=dict(img='leftImg8bit/val/'),
+ test_mode=True,
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instancesonly_filtered_gtFine_val.json',
+ metric='bbox',
+ backend_args=backend_args)
+
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..136403136c67a6726662832b66f56701ff5aba8a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/cityscapes_instance.py
@@ -0,0 +1,113 @@
+# dataset settings
+dataset_type = 'CityscapesDataset'
+data_root = 'data/cityscapes/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/segmentation/cityscapes/'
+
+# Method 2: Use backend_args, file_client_args in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/segmentation/',
+# 'data/': 's3://openmmlab/datasets/segmentation/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomResize',
+ scale=[(2048, 800), (2048, 1024)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(2048, 1024), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='RepeatDataset',
+ times=8,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instancesonly_filtered_gtFine_train.json',
+ data_prefix=dict(img='leftImg8bit/train/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instancesonly_filtered_gtFine_val.json',
+ data_prefix=dict(img='leftImg8bit/val/'),
+ test_mode=True,
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+
+test_dataloader = val_dataloader
+
+val_evaluator = [
+ dict(
+ type='CocoMetric',
+ ann_file=data_root +
+ 'annotations/instancesonly_filtered_gtFine_val.json',
+ metric=['bbox', 'segm'],
+ backend_args=backend_args),
+ dict(
+ type='CityScapesMetric',
+ seg_prefix=data_root + 'gtFine/val',
+ outfile_prefix='./work_dirs/cityscapes_metric/instance',
+ backend_args=backend_args)
+]
+
+test_evaluator = val_evaluator
+
+# inference on test dataset and
+# format the output results for submission.
+# test_dataloader = dict(
+# batch_size=1,
+# num_workers=2,
+# persistent_workers=True,
+# drop_last=False,
+# sampler=dict(type='DefaultSampler', shuffle=False),
+# dataset=dict(
+# type=dataset_type,
+# data_root=data_root,
+# ann_file='annotations/instancesonly_filtered_gtFine_test.json',
+# data_prefix=dict(img='leftImg8bit/test/'),
+# test_mode=True,
+# filter_cfg=dict(filter_empty_gt=True, min_size=32),
+# pipeline=test_pipeline))
+# test_evaluator = dict(
+# type='CityScapesMetric',
+# format_only=True,
+# outfile_prefix='./work_dirs/cityscapes_metric/test')
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_caption.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_caption.py
new file mode 100644
index 0000000000000000000000000000000000000000..a1bd898313927e4fca336dfa10f05e78b9fb7162
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_caption.py
@@ -0,0 +1,60 @@
+# data settings
+
+dataset_type = 'CocoCaptionDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ imdecode_backend='pillow',
+ backend_args=backend_args),
+ dict(
+ type='Resize',
+ scale=(224, 224),
+ interpolation='bicubic',
+ backend='pillow'),
+ dict(type='PackInputs', meta_keys=['image_id']),
+]
+
+# ann_file download from
+# train dataset: https://storage.googleapis.com/sfr-vision-language-research/datasets/coco_karpathy_train.json # noqa
+# val dataset: https://storage.googleapis.com/sfr-vision-language-research/datasets/coco_karpathy_val.json # noqa
+# test dataset: https://storage.googleapis.com/sfr-vision-language-research/datasets/coco_karpathy_test.json # noqa
+# val evaluator: https://storage.googleapis.com/sfr-vision-language-research/datasets/coco_karpathy_val_gt.json # noqa
+# test evaluator: https://storage.googleapis.com/sfr-vision-language-research/datasets/coco_karpathy_test_gt.json # noqa
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/coco_karpathy_val.json',
+ pipeline=test_pipeline,
+ ))
+
+val_evaluator = dict(
+ type='COCOCaptionMetric',
+ ann_file=data_root + 'annotations/coco_karpathy_val_gt.json',
+)
+
+# # If you want standard test, please manually configure the test dataset
+test_dataloader = val_dataloader
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..fdf8dfad9476b1d7b7a4e8c3e2832f115a1ea7f2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_detection.py
@@ -0,0 +1,95 @@
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+# inference on test dataset and
+# format the output results for submission.
+# test_dataloader = dict(
+# batch_size=1,
+# num_workers=2,
+# persistent_workers=True,
+# drop_last=False,
+# sampler=dict(type='DefaultSampler', shuffle=False),
+# dataset=dict(
+# type=dataset_type,
+# data_root=data_root,
+# ann_file=data_root + 'annotations/image_info_test-dev2017.json',
+# data_prefix=dict(img='test2017/'),
+# test_mode=True,
+# pipeline=test_pipeline))
+# test_evaluator = dict(
+# type='CocoMetric',
+# metric='bbox',
+# format_only=True,
+# ann_file=data_root + 'annotations/image_info_test-dev2017.json',
+# outfile_prefix='./work_dirs/coco_detection/test')
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..e91cb354038db4df3b990b307a5da9d77f341a88
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance.py
@@ -0,0 +1,95 @@
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+# inference on test dataset and
+# format the output results for submission.
+# test_dataloader = dict(
+# batch_size=1,
+# num_workers=2,
+# persistent_workers=True,
+# drop_last=False,
+# sampler=dict(type='DefaultSampler', shuffle=False),
+# dataset=dict(
+# type=dataset_type,
+# data_root=data_root,
+# ann_file=data_root + 'annotations/image_info_test-dev2017.json',
+# data_prefix=dict(img='test2017/'),
+# test_mode=True,
+# pipeline=test_pipeline))
+# test_evaluator = dict(
+# type='CocoMetric',
+# metric=['bbox', 'segm'],
+# format_only=True,
+# ann_file=data_root + 'annotations/image_info_test-dev2017.json',
+# outfile_prefix='./work_dirs/coco_instance/test')
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance_semantic.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance_semantic.py
new file mode 100644
index 0000000000000000000000000000000000000000..cc961863306690c056e564b542d518c0ebfbb7e2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_instance_semantic.py
@@ -0,0 +1,78 @@
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(
+ type='LoadAnnotations', with_bbox=True, with_mask=True, with_seg=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(
+ type='LoadAnnotations', with_bbox=True, with_mask=True, with_seg=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/', seg='stuffthingmaps/train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_panoptic.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..0b95b619e68ed531d361bbd11a2382852c13446e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_panoptic.py
@@ -0,0 +1,94 @@
+# dataset settings
+dataset_type = 'CocoPanopticDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadPanopticAnnotations', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadPanopticAnnotations', backend_args=backend_args),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/panoptic_train2017.json',
+ data_prefix=dict(
+ img='train2017/', seg='annotations/panoptic_train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/panoptic_val2017.json',
+ data_prefix=dict(img='val2017/', seg='annotations/panoptic_val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoPanopticMetric',
+ ann_file=data_root + 'annotations/panoptic_val2017.json',
+ seg_prefix=data_root + 'annotations/panoptic_val2017/',
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+# inference on test dataset and
+# format the output results for submission.
+# test_dataloader = dict(
+# batch_size=1,
+# num_workers=1,
+# persistent_workers=True,
+# drop_last=False,
+# sampler=dict(type='DefaultSampler', shuffle=False),
+# dataset=dict(
+# type=dataset_type,
+# data_root=data_root,
+# ann_file='annotations/panoptic_image_info_test-dev2017.json',
+# data_prefix=dict(img='test2017/'),
+# test_mode=True,
+# pipeline=test_pipeline))
+# test_evaluator = dict(
+# type='CocoPanopticMetric',
+# format_only=True,
+# ann_file=data_root + 'annotations/panoptic_image_info_test-dev2017.json',
+# outfile_prefix='./work_dirs/coco_panoptic/test')
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/coco_semantic.py b/grounding-dino/mmdetection/configs/_base_/datasets/coco_semantic.py
new file mode 100644
index 0000000000000000000000000000000000000000..944bbbaeaeb6f10f0946bd1fc828bb01ea6c1fc3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/coco_semantic.py
@@ -0,0 +1,78 @@
+# dataset settings
+dataset_type = 'CocoSegDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=False,
+ with_label=False,
+ with_seg=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=False,
+ with_label=False,
+ with_seg=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_path', 'ori_shape', 'img_shape', 'scale_factor'))
+]
+
+# For stuffthingmaps_semseg, please refer to
+# `docs/en/user_guides/dataset_prepare.md`
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(
+ img_path='train2017/',
+ seg_map_path='stuffthingmaps_semseg/train2017/'),
+ pipeline=train_pipeline))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(
+ img_path='val2017/',
+ seg_map_path='stuffthingmaps_semseg/val2017/'),
+ pipeline=test_pipeline))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(type='SemSegMetric', iou_metrics=['mIoU'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/deepfashion.py b/grounding-dino/mmdetection/configs/_base_/datasets/deepfashion.py
new file mode 100644
index 0000000000000000000000000000000000000000..a93dc7152f7a2e28ab726c79f9398a1034b7b4a1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/deepfashion.py
@@ -0,0 +1,95 @@
+# dataset settings
+dataset_type = 'DeepFashionDataset'
+data_root = 'data/DeepFashion/In-shop/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(750, 1101), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(750, 1101), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='RepeatDataset',
+ times=2,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='Anno/segmentation/DeepFashion_segmentation_train.json',
+ data_prefix=dict(img='Img/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='Anno/segmentation/DeepFashion_segmentation_query.json',
+ data_prefix=dict(img='Img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='Anno/segmentation/DeepFashion_segmentation_gallery.json',
+ data_prefix=dict(img='Img/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root +
+ 'Anno/segmentation/DeepFashion_segmentation_query.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root +
+ 'Anno/segmentation/DeepFashion_segmentation_gallery.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/dsdl.py b/grounding-dino/mmdetection/configs/_base_/datasets/dsdl.py
new file mode 100644
index 0000000000000000000000000000000000000000..1f19e5e498b18a404f3c4e6419316b5f9981e811
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/dsdl.py
@@ -0,0 +1,62 @@
+dataset_type = 'DSDLDetDataset'
+data_root = 'path to dataset folder'
+train_ann = 'path to train yaml file'
+val_ann = 'path to val yaml file'
+
+backend_args = None
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': "s3://open_data/",
+# 'data/': "s3://open_data/"
+# }))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file=train_ann,
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file=val_ann,
+ test_mode=True,
+ pipeline=test_pipeline))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(type='CocoMetric', metric='bbox')
+# val_evaluator = dict(type='VOCMetric', metric='mAP', eval_mode='11points')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/isaid_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/isaid_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..09ddcab02bdd52374d5093d446abb0e34751f7a3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/isaid_instance.py
@@ -0,0 +1,59 @@
+# dataset settings
+dataset_type = 'iSAIDDataset'
+data_root = 'data/iSAID/'
+backend_args = None
+
+# Please see `projects/iSAID/README.md` for data preparation
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(800, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(800, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='train/instancesonly_filtered_train.json',
+ data_prefix=dict(img='train/images/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='val/instancesonly_filtered_val.json',
+ data_prefix=dict(img='val/images/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'val/instancesonly_filtered_val.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v0.5_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v0.5_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..d0ca44efb6d31aae5f6426a1c8b89d2e9be2104f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v0.5_instance.py
@@ -0,0 +1,79 @@
+# dataset settings
+dataset_type = 'LVISV05Dataset'
+data_root = 'data/lvis_v0.5/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/lvis_v0.5/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='ClassBalancedDataset',
+ oversample_thr=1e-3,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v0.5_train.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v0.5_val.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='LVISMetric',
+ ann_file=data_root + 'annotations/lvis_v0.5_val.json',
+ metric=['bbox', 'segm'],
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v1_instance.py b/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v1_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..0413f370a2b635362a60c20881769064bac9a603
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/lvis_v1_instance.py
@@ -0,0 +1,22 @@
+# dataset settings
+_base_ = 'lvis_v0.5_instance.py'
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/lvis_v1/'
+
+train_dataloader = dict(
+ dataset=dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_train.json',
+ data_prefix=dict(img=''))))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_val.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(ann_file=data_root + 'annotations/lvis_v1_val.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge.py b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge.py
new file mode 100644
index 0000000000000000000000000000000000000000..ce2828ef70a34c123792d252bf992f423049d065
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge.py
@@ -0,0 +1,90 @@
+# dataset settings
+dataset_type = 'MOTChallengeDataset'
+data_root = 'data/MOT17/'
+img_scale = (1088, 1088)
+
+backend_args = None
+# data pipeline
+train_pipeline = [
+ dict(
+ type='UniformRefFrameSample',
+ num_ref_imgs=1,
+ frame_range=10,
+ filter_key_img=True),
+ dict(
+ type='TransformBroadcaster',
+ share_random_params=True,
+ transforms=[
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadTrackAnnotations'),
+ dict(
+ type='RandomResize',
+ scale=img_scale,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ clip_object_border=False),
+ dict(type='PhotoMetricDistortion')
+ ]),
+ dict(
+ type='TransformBroadcaster',
+ # different cropped positions for different frames
+ share_random_params=False,
+ transforms=[
+ dict(
+ type='RandomCrop', crop_size=img_scale, bbox_clip_border=False)
+ ]),
+ dict(
+ type='TransformBroadcaster',
+ share_random_params=True,
+ transforms=[
+ dict(type='RandomFlip', prob=0.5),
+ ]),
+ dict(type='PackTrackInputs')
+]
+
+test_pipeline = [
+ dict(
+ type='TransformBroadcaster',
+ transforms=[
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(type='LoadTrackAnnotations')
+ ]),
+ dict(type='PackTrackInputs')
+]
+
+# dataloader
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='TrackImgSampler'), # image-based sampling
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ visibility_thr=-1,
+ ann_file='annotations/half-train_cocoformat.json',
+ data_prefix=dict(img_path='train'),
+ metainfo=dict(classes=('pedestrian', )),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ # Now we support two ways to test, image_based and video_based
+ # if you want to use video_based sampling, you can use as follows
+ # sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ sampler=dict(type='TrackImgSampler'), # image-based sampling
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/half-val_cocoformat.json',
+ data_prefix=dict(img_path='train'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# evaluator
+val_evaluator = dict(
+ type='MOTChallengeMetric', metric=['HOTA', 'CLEAR', 'Identity'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_det.py b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_det.py
new file mode 100644
index 0000000000000000000000000000000000000000..a988572c3837eb2a8a6bf7b9eca06f3d82abdfda
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_det.py
@@ -0,0 +1,66 @@
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/MOT17/'
+
+backend_args = None
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args, to_float32=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=(1088, 1088),
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True,
+ clip_object_border=False),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='RandomCrop', crop_size=(1088, 1088), bbox_clip_border=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1088, 1088), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/half-train_cocoformat.json',
+ data_prefix=dict(img='train/'),
+ metainfo=dict(classes=('pedestrian', )),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/half-val_cocoformat.json',
+ data_prefix=dict(img='train/'),
+ metainfo=dict(classes=('pedestrian', )),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/half-val_cocoformat.json',
+ metric='bbox',
+ format_only=False)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_reid.py b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_reid.py
new file mode 100644
index 0000000000000000000000000000000000000000..57a95b531f3591e60daaabc5eea6f11c7424215b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/mot_challenge_reid.py
@@ -0,0 +1,61 @@
+# dataset settings
+dataset_type = 'ReIDDataset'
+data_root = 'data/MOT17/'
+
+backend_args = None
+# data pipeline
+train_pipeline = [
+ dict(
+ type='TransformBroadcaster',
+ share_random_params=False,
+ transforms=[
+ dict(
+ type='LoadImageFromFile',
+ backend_args=backend_args,
+ to_float32=True),
+ dict(
+ type='Resize',
+ scale=(128, 256),
+ keep_ratio=False,
+ clip_object_border=False),
+ dict(type='RandomFlip', prob=0.5, direction='horizontal'),
+ ]),
+ dict(type='PackReIDInputs', meta_keys=('flip', 'flip_direction'))
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args, to_float32=True),
+ dict(type='Resize', scale=(128, 256), keep_ratio=False),
+ dict(type='PackReIDInputs')
+]
+
+# dataloader
+train_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ triplet_sampler=dict(num_ids=8, ins_per_id=4),
+ data_prefix=dict(img_path='reid/imgs'),
+ ann_file='reid/meta/train_80.txt',
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ triplet_sampler=None,
+ data_prefix=dict(img_path='reid/imgs'),
+ ann_file='reid/meta/val_20.txt',
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# evaluator
+val_evaluator = dict(type='ReIDMetrics', metric=['mAP', 'CMC'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/objects365v1_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/objects365v1_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..ee398698608543e13188452a816283e9a2563390
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/objects365v1_detection.py
@@ -0,0 +1,74 @@
+# dataset settings
+dataset_type = 'Objects365V1Dataset'
+data_root = 'data/Objects365/Obj365_v1/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/objects365_train.json',
+ data_prefix=dict(img='train/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/objects365_val.json',
+ data_prefix=dict(img='val/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/objects365_val.json',
+ metric='bbox',
+ sort_categories=True,
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/objects365v2_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/objects365v2_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..b25a7ba901befa8d61e3cdae8a7c68fb8a9c5aef
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/objects365v2_detection.py
@@ -0,0 +1,73 @@
+# dataset settings
+dataset_type = 'Objects365V2Dataset'
+data_root = 'data/Objects365/Obj365_v2/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/zhiyuan_objv2_train.json',
+ data_prefix=dict(img='train/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/zhiyuan_objv2_val.json',
+ data_prefix=dict(img='val/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/zhiyuan_objv2_val.json',
+ metric='bbox',
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/openimages_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/openimages_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..129661b405c70d3e2d0d2c4741e3a59333dd960c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/openimages_detection.py
@@ -0,0 +1,81 @@
+# dataset settings
+dataset_type = 'OpenImagesDataset'
+data_root = 'data/OpenImages/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1024, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1024, 800), keep_ratio=True),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ # TODO: find a better way to collect image_level_labels
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances', 'image_level_labels'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=0, # workers_per_gpu > 0 may occur out of memory
+ persistent_workers=False,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/oidv6-train-annotations-bbox.csv',
+ data_prefix=dict(img='OpenImages/train/'),
+ label_file='annotations/class-descriptions-boxable.csv',
+ hierarchy_file='annotations/bbox_labels_600_hierarchy.json',
+ meta_file='annotations/train-image-metas.pkl',
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=0,
+ persistent_workers=False,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/validation-annotations-bbox.csv',
+ data_prefix=dict(img='OpenImages/validation/'),
+ label_file='annotations/class-descriptions-boxable.csv',
+ hierarchy_file='annotations/bbox_labels_600_hierarchy.json',
+ meta_file='annotations/validation-image-metas.pkl',
+ image_level_ann_file='annotations/validation-'
+ 'annotations-human-imagelabels-boxable.csv',
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='OpenImagesMetric',
+ iou_thrs=0.5,
+ ioa_thrs=0.5,
+ use_group_of=True,
+ get_supercategory=True)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/refcoco+.py b/grounding-dino/mmdetection/configs/_base_/datasets/refcoco+.py
new file mode 100644
index 0000000000000000000000000000000000000000..ae0278ddf6c30fda6e4fb42aed1cb1b9a55109ec
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/refcoco+.py
@@ -0,0 +1,55 @@
+# dataset settings
+dataset_type = 'RefCocoDataset'
+data_root = 'data/coco/'
+
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(
+ type='LoadAnnotations',
+ with_mask=True,
+ with_bbox=False,
+ with_seg=False,
+ with_label=False),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'gt_masks', 'text'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcoco+/instances.json',
+ split_file='refcoco+/refs(unc).p',
+ split='val',
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcoco+/instances.json',
+ split_file='refcoco+/refs(unc).p',
+ split='testA', # or 'testB'
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+val_evaluator = dict(type='RefSegMetric', metric=['cIoU', 'mIoU'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/refcoco.py b/grounding-dino/mmdetection/configs/_base_/datasets/refcoco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7b6caefa9a4bbfabdb49689588821f99d882a80f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/refcoco.py
@@ -0,0 +1,55 @@
+# dataset settings
+dataset_type = 'RefCocoDataset'
+data_root = 'data/coco/'
+
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(
+ type='LoadAnnotations',
+ with_mask=True,
+ with_bbox=False,
+ with_seg=False,
+ with_label=False),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'gt_masks', 'text'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcoco/instances.json',
+ split_file='refcoco/refs(unc).p',
+ split='val',
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcoco/instances.json',
+ split_file='refcoco/refs(unc).p',
+ split='testA', # or 'testB'
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+val_evaluator = dict(type='RefSegMetric', metric=['cIoU', 'mIoU'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/refcocog.py b/grounding-dino/mmdetection/configs/_base_/datasets/refcocog.py
new file mode 100644
index 0000000000000000000000000000000000000000..19dbeef1cde79fcb2aa80bb9936a60cc30089963
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/refcocog.py
@@ -0,0 +1,55 @@
+# dataset settings
+dataset_type = 'RefCocoDataset'
+data_root = 'data/coco/'
+
+backend_args = None
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(
+ type='LoadAnnotations',
+ with_mask=True,
+ with_bbox=False,
+ with_seg=False,
+ with_label=False),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'gt_masks', 'text'))
+]
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcocog/instances.json',
+ split_file='refcocog/refs(umd).p',
+ split='val',
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+test_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ data_prefix=dict(img_path='train2014/'),
+ ann_file='refcocog/instances.json',
+ split_file='refcocog/refs(umd).p',
+ split='test',
+ text_mode='select_first',
+ pipeline=test_pipeline))
+
+val_evaluator = dict(type='RefSegMetric', metric=['cIoU', 'mIoU'])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/semi_coco_detection.py b/grounding-dino/mmdetection/configs/_base_/datasets/semi_coco_detection.py
new file mode 100644
index 0000000000000000000000000000000000000000..694f25f841e06dbb59a699dfe13c18e34dbdce9f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/semi_coco_detection.py
@@ -0,0 +1,178 @@
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+color_space = [
+ [dict(type='ColorTransform')],
+ [dict(type='AutoContrast')],
+ [dict(type='Equalize')],
+ [dict(type='Sharpness')],
+ [dict(type='Posterize')],
+ [dict(type='Solarize')],
+ [dict(type='Color')],
+ [dict(type='Contrast')],
+ [dict(type='Brightness')],
+]
+
+geometric = [
+ [dict(type='Rotate')],
+ [dict(type='ShearX')],
+ [dict(type='ShearY')],
+ [dict(type='TranslateX')],
+ [dict(type='TranslateY')],
+]
+
+scale = [(1333, 400), (1333, 1200)]
+
+branch_field = ['sup', 'unsup_teacher', 'unsup_student']
+# pipeline used to augment labeled data,
+# which will be sent to student model for supervised training.
+sup_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomResize', scale=scale, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='RandAugment', aug_space=color_space, aug_num=1),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)),
+ dict(
+ type='MultiBranch',
+ branch_field=branch_field,
+ sup=dict(type='PackDetInputs'))
+]
+
+# pipeline used to augment unlabeled data weakly,
+# which will be sent to teacher model for predicting pseudo instances.
+weak_pipeline = [
+ dict(type='RandomResize', scale=scale, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction',
+ 'homography_matrix')),
+]
+
+# pipeline used to augment unlabeled data strongly,
+# which will be sent to student model for unsupervised training.
+strong_pipeline = [
+ dict(type='RandomResize', scale=scale, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomOrder',
+ transforms=[
+ dict(type='RandAugment', aug_space=color_space, aug_num=1),
+ dict(type='RandAugment', aug_space=geometric, aug_num=1),
+ ]),
+ dict(type='RandomErasing', n_patches=(1, 5), ratio=(0, 0.2)),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction',
+ 'homography_matrix')),
+]
+
+# pipeline used to augment unlabeled data into different views
+unsup_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadEmptyAnnotations'),
+ dict(
+ type='MultiBranch',
+ branch_field=branch_field,
+ unsup_teacher=weak_pipeline,
+ unsup_student=strong_pipeline,
+ )
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+batch_size = 5
+num_workers = 5
+# There are two common semi-supervised learning settings on the coco dataset:
+# (1) Divide the train2017 into labeled and unlabeled datasets
+# by a fixed percentage, such as 1%, 2%, 5% and 10%.
+# The format of labeled_ann_file and unlabeled_ann_file are
+# instances_train2017.{fold}@{percent}.json, and
+# instances_train2017.{fold}@{percent}-unlabeled.json
+# `fold` is used for cross-validation, and `percent` represents
+# the proportion of labeled data in the train2017.
+# (2) Choose the train2017 as the labeled dataset
+# and unlabeled2017 as the unlabeled dataset.
+# The labeled_ann_file and unlabeled_ann_file are
+# instances_train2017.json and image_info_unlabeled2017.json
+# We use this configuration by default.
+labeled_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=sup_pipeline,
+ backend_args=backend_args)
+
+unlabeled_dataset = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_unlabeled2017.json',
+ data_prefix=dict(img='unlabeled2017/'),
+ filter_cfg=dict(filter_empty_gt=False),
+ pipeline=unsup_pipeline,
+ backend_args=backend_args)
+
+train_dataloader = dict(
+ batch_size=batch_size,
+ num_workers=num_workers,
+ persistent_workers=True,
+ sampler=dict(
+ type='GroupMultiSourceSampler',
+ batch_size=batch_size,
+ source_ratio=[1, 4]),
+ dataset=dict(
+ type='ConcatDataset', datasets=[labeled_dataset, unlabeled_dataset]))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ format_only=False,
+ backend_args=backend_args)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/v3det.py b/grounding-dino/mmdetection/configs/_base_/datasets/v3det.py
new file mode 100644
index 0000000000000000000000000000000000000000..38ccbf864b6248192dfbf4abaf4858b5f93d45e8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/v3det.py
@@ -0,0 +1,69 @@
+# dataset settings
+dataset_type = 'V3DetDataset'
+data_root = 'data/V3Det/'
+
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='ClassBalancedDataset',
+ oversample_thr=1e-3,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/v3det_2023_v1_train.json',
+ data_prefix=dict(img=''),
+ filter_cfg=dict(filter_empty_gt=True, min_size=4),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/v3det_2023_v1_val.json',
+ data_prefix=dict(img=''),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/v3det_2023_v1_val.json',
+ metric='bbox',
+ format_only=False,
+ backend_args=backend_args,
+ use_mp_eval=True,
+ proposal_nums=[300])
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/voc0712.py b/grounding-dino/mmdetection/configs/_base_/datasets/voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..47f5e6563b7f47dd6cfec02248d4c8decd32afe4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/voc0712.py
@@ -0,0 +1,92 @@
+# dataset settings
+dataset_type = 'VOCDataset'
+data_root = 'data/VOCdevkit/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically Infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/segmentation/VOCdevkit/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/segmentation/',
+# 'data/': 's3://openmmlab/datasets/segmentation/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='RepeatDataset',
+ times=3,
+ dataset=dict(
+ type='ConcatDataset',
+ # VOCDataset will add different `dataset_type` in dataset.metainfo,
+ # which will get error if using ConcatDataset. Adding
+ # `ignore_keys` can avoid this error.
+ ignore_keys=['dataset_type'],
+ datasets=[
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2007/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2007/'),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args),
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2012/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2012/'),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)
+ ])))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2007/ImageSets/Main/test.txt',
+ data_prefix=dict(sub_data_root='VOC2007/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+# Pascal VOC2007 uses `11points` as default evaluate mode, while PASCAL
+# VOC2012 defaults to use 'area'.
+val_evaluator = dict(type='VOCMetric', metric='mAP', eval_mode='11points')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/wider_face.py b/grounding-dino/mmdetection/configs/_base_/datasets/wider_face.py
new file mode 100644
index 0000000000000000000000000000000000000000..7042bc46e877ed899969730325143307e15adf64
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/wider_face.py
@@ -0,0 +1,73 @@
+# dataset settings
+dataset_type = 'WIDERFaceDataset'
+data_root = 'data/WIDERFace/'
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/cityscapes/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+img_scale = (640, 640) # VGA resolution
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='train.txt',
+ data_prefix=dict(img='WIDER_train'),
+ filter_cfg=dict(filter_empty_gt=True, bbox_min_size=17, min_size=32),
+ pipeline=train_pipeline))
+
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='val.txt',
+ data_prefix=dict(img='WIDER_val'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ # TODO: support WiderFace-Evaluation for easy, medium, hard cases
+ type='VOCMetric',
+ metric='mAP',
+ eval_mode='11points')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/_base_/datasets/youtube_vis.py b/grounding-dino/mmdetection/configs/_base_/datasets/youtube_vis.py
new file mode 100644
index 0000000000000000000000000000000000000000..ece07cc3879e512082e302c2e3f76108c57a0234
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/datasets/youtube_vis.py
@@ -0,0 +1,66 @@
+dataset_type = 'YouTubeVISDataset'
+data_root = 'data/youtube_vis_2019/'
+dataset_version = data_root[-5:-1] # 2019 or 2021
+
+backend_args = None
+
+# dataset settings
+train_pipeline = [
+ dict(
+ type='UniformRefFrameSample',
+ num_ref_imgs=1,
+ frame_range=100,
+ filter_key_img=True),
+ dict(
+ type='TransformBroadcaster',
+ share_random_params=True,
+ transforms=[
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadTrackAnnotations', with_mask=True),
+ dict(type='Resize', scale=(640, 360), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ ]),
+ dict(type='PackTrackInputs')
+]
+
+test_pipeline = [
+ dict(
+ type='TransformBroadcaster',
+ transforms=[
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(640, 360), keep_ratio=True),
+ dict(type='LoadTrackAnnotations', with_mask=True),
+ ]),
+ dict(type='PackTrackInputs')
+]
+
+# dataloader
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ persistent_workers=True,
+ # sampler=dict(type='TrackImgSampler'), # image-based sampling
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='TrackAspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2019_train.json',
+ data_prefix=dict(img_path='train/JPEGImages'),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2019_valid.json',
+ data_prefix=dict(img_path='valid/JPEGImages'),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/_base_/default_runtime.py b/grounding-dino/mmdetection/configs/_base_/default_runtime.py
new file mode 100644
index 0000000000000000000000000000000000000000..870e5614c86d7e1bbdad13d77a0db03a46ce717a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/default_runtime.py
@@ -0,0 +1,24 @@
+default_scope = 'mmdet'
+
+default_hooks = dict(
+ timer=dict(type='IterTimerHook'),
+ logger=dict(type='LoggerHook', interval=50),
+ param_scheduler=dict(type='ParamSchedulerHook'),
+ checkpoint=dict(type='CheckpointHook', interval=1),
+ sampler_seed=dict(type='DistSamplerSeedHook'),
+ visualization=dict(type='DetVisualizationHook'))
+
+env_cfg = dict(
+ cudnn_benchmark=False,
+ mp_cfg=dict(mp_start_method='fork', opencv_num_threads=0),
+ dist_cfg=dict(backend='nccl'),
+)
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='DetLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=True)
+
+log_level = 'INFO'
+load_from = None
+resume = False
diff --git a/grounding-dino/mmdetection/configs/_base_/models/cascade-mask-rcnn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/cascade-mask-rcnn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..c5167f7a02e66c80bd8ec8cc7572acb22eaadba5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/cascade-mask-rcnn_r50_fpn.py
@@ -0,0 +1,203 @@
+# model settings
+model = dict(
+ type='CascadeRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='CascadeRoIHead',
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_head=dict(
+ type='FCNMaskHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.6,
+ neg_iou_thr=0.6,
+ min_pos_iou=0.6,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.7,
+ min_pos_iou=0.7,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False)
+ ]),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100,
+ mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/cascade-rcnn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/cascade-rcnn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..50c57f01ca3a6ea827f71801b0c233af268914f9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/cascade-rcnn_r50_fpn.py
@@ -0,0 +1,185 @@
+# model settings
+model = dict(
+ type='CascadeRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='CascadeRoIHead',
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ]),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.6,
+ neg_iou_thr=0.6,
+ min_pos_iou=0.6,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.7,
+ min_pos_iou=0.7,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)
+ ]),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/fast-rcnn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/fast-rcnn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..2bd45e9266b01df302b78e50258fa1572144cb21
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/fast-rcnn_r50_fpn.py
@@ -0,0 +1,68 @@
+# model settings
+model = dict(
+ type='FastRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-c4.py b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-c4.py
new file mode 100644
index 0000000000000000000000000000000000000000..15d2db72e48790505c2a1e4e7d184c1803f7ab31
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-c4.py
@@ -0,0 +1,123 @@
+# model settings
+norm_cfg = dict(type='BN', requires_grad=False)
+model = dict(
+ type='FasterRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=3,
+ strides=(1, 2, 2),
+ dilations=(1, 1, 1),
+ out_indices=(2, ),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=1024,
+ feat_channels=1024,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[2, 4, 8, 16, 32],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[16]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ shared_head=dict(
+ type='ResLayer',
+ depth=50,
+ stage=3,
+ stride=2,
+ dilation=1,
+ style='caffe',
+ norm_cfg=norm_cfg,
+ norm_eval=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=1024,
+ featmap_strides=[16]),
+ bbox_head=dict(
+ type='BBoxHead',
+ with_avg_pool=True,
+ roi_feat_size=7,
+ in_channels=2048,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=12000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=6000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-dc5.py b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-dc5.py
new file mode 100644
index 0000000000000000000000000000000000000000..189915e3d9ce7239493da6465931f91e2d9d664f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50-caffe-dc5.py
@@ -0,0 +1,111 @@
+# model settings
+norm_cfg = dict(type='BN', requires_grad=False)
+model = dict(
+ type='FasterRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ strides=(1, 2, 2, 1),
+ dilations=(1, 1, 1, 2),
+ out_indices=(3, ),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=2048,
+ feat_channels=2048,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[2, 4, 8, 16, 32],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[16]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=2048,
+ featmap_strides=[16]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=2048,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=12000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms=dict(type='nms', iou_threshold=0.7),
+ nms_pre=6000,
+ max_per_img=1000,
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..31aa1461799a988a11adb901306a063fd3f0b951
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/faster-rcnn_r50_fpn.py
@@ -0,0 +1,114 @@
+# model settings
+model = dict(
+ type='FasterRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100)
+ # soft-nms is also supported for rcnn testing
+ # e.g., nms=dict(type='soft_nms', iou_threshold=0.5, min_score=0.05)
+ ))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50-caffe-c4.py b/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50-caffe-c4.py
new file mode 100644
index 0000000000000000000000000000000000000000..de1131b24893ae24bd99923895fd844837c9b46d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50-caffe-c4.py
@@ -0,0 +1,132 @@
+# model settings
+norm_cfg = dict(type='BN', requires_grad=False)
+model = dict(
+ type='MaskRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=3,
+ strides=(1, 2, 2),
+ dilations=(1, 1, 1),
+ out_indices=(2, ),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=1024,
+ feat_channels=1024,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[2, 4, 8, 16, 32],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[16]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ shared_head=dict(
+ type='ResLayer',
+ depth=50,
+ stage=3,
+ stride=2,
+ dilation=1,
+ style='caffe',
+ norm_cfg=norm_cfg,
+ norm_eval=True),
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=1024,
+ featmap_strides=[16]),
+ bbox_head=dict(
+ type='BBoxHead',
+ with_avg_pool=True,
+ roi_feat_size=7,
+ in_channels=2048,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ mask_roi_extractor=None,
+ mask_head=dict(
+ type='FCNMaskHead',
+ num_convs=0,
+ in_channels=2048,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=12000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=14,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=6000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ max_per_img=1000,
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100,
+ mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..b4ff7a49d0a2f0abd4823ef89ad957d9708085e7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/mask-rcnn_r50_fpn.py
@@ -0,0 +1,127 @@
+# model settings
+model = dict(
+ type='MaskRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_head=dict(
+ type='FCNMaskHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100,
+ mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/retinanet_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/retinanet_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..53662c9f1390af22b15c5591e122b0aa0b2d6c92
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/retinanet_r50_fpn.py
@@ -0,0 +1,68 @@
+# model settings
+model = dict(
+ type='RetinaNet',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_input',
+ num_outs=5),
+ bbox_head=dict(
+ type='RetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ # model training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='PseudoSampler'), # Focal loss should use PseudoSampler
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/rpn_r50-caffe-c4.py b/grounding-dino/mmdetection/configs/_base_/models/rpn_r50-caffe-c4.py
new file mode 100644
index 0000000000000000000000000000000000000000..ed1dbe746d432d96d70e7dc9048c9e1b1727c938
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/rpn_r50-caffe-c4.py
@@ -0,0 +1,64 @@
+# model settings
+model = dict(
+ type='RPN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=3,
+ strides=(1, 2, 2),
+ dilations=(1, 1, 1),
+ out_indices=(2, ),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ neck=None,
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=1024,
+ feat_channels=1024,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[2, 4, 8, 16, 32],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[16]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=12000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/rpn_r50_fpn.py b/grounding-dino/mmdetection/configs/_base_/models/rpn_r50_fpn.py
new file mode 100644
index 0000000000000000000000000000000000000000..6bc4790434a368d0728d74dcd7ba79e665aae276
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/rpn_r50_fpn.py
@@ -0,0 +1,64 @@
+# model settings
+model = dict(
+ type='RPN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=2000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/_base_/models/ssd300.py b/grounding-dino/mmdetection/configs/_base_/models/ssd300.py
new file mode 100644
index 0000000000000000000000000000000000000000..fd113c7cbc41494eabb6a56061f8a90343ac9efd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/_base_/models/ssd300.py
@@ -0,0 +1,63 @@
+# model settings
+input_size = 300
+model = dict(
+ type='SingleStageDetector',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[1, 1, 1],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='SSDVGG',
+ depth=16,
+ with_last_pool=False,
+ ceil_mode=True,
+ out_indices=(3, 4),
+ out_feature_indices=(22, 34),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://vgg16_caffe')),
+ neck=dict(
+ type='SSDNeck',
+ in_channels=(512, 1024),
+ out_channels=(512, 1024, 512, 256, 256, 256),
+ level_strides=(2, 2, 1, 1),
+ level_paddings=(1, 1, 0, 0),
+ l2_norm_scale=20),
+ bbox_head=dict(
+ type='SSDHead',
+ in_channels=(512, 1024, 512, 256, 256, 256),
+ num_classes=80,
+ anchor_generator=dict(
+ type='SSDAnchorGenerator',
+ scale_major=False,
+ input_size=input_size,
+ basesize_ratio_range=(0.15, 0.9),
+ strides=[8, 16, 32, 64, 100, 300],
+ ratios=[[2], [2, 3], [2, 3], [2, 3], [2], [2]]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2])),
+ # model training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.,
+ ignore_iof_thr=-1,
+ gt_max_assign_all=False),
+ sampler=dict(type='PseudoSampler'),
+ smoothl1_beta=1.,
+ allowed_border=-1,
+ pos_weight=-1,
+ neg_pos_ratio=3,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ nms=dict(type='nms', iou_threshold=0.45),
+ min_bbox_size=0,
+ score_thr=0.02,
+ max_per_img=200))
+cudnn_benchmark = True
diff --git a/grounding-dino/mmdetection/configs/ddod/ddod_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ddod/ddod_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..fed1116b1f92e613517a57aa196839e4de3037dc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ddod/ddod_r50_fpn_1x_coco.py
@@ -0,0 +1,72 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ type='DDOD',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='DDODHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0),
+ loss_iou=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ train_cfg=dict(
+ # assigner is mean cls_assigner
+ assigner=dict(type='ATSSAssigner', topk=9, alpha=0.8),
+ reg_assigner=dict(type='ATSSAssigner', topk=9, alpha=0.5),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/ddq/README.md b/grounding-dino/mmdetection/configs/ddq/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..3f6f459cbbb48c50d5fbd6abec3c6dbda4d422b4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ddq/README.md
@@ -0,0 +1,39 @@
+# DDQ
+
+> [Dense Distinct Query for End-to-End Object Detection](https://arxiv.org/abs/2303.12776)
+
+
+
+## Abstract
+
+
+
+One-to-one label assignment in object detection has successfully obviated the need for non-maximum suppression (NMS) as postprocessing and makes the pipeline end-to-end. However, it triggers a new dilemma as the widely used sparse queries cannot guarantee a high recall, while dense queries inevitably bring more similar queries and encounter optimization difficulties. As both sparse and dense queries are problematic, then what are the expected queries in end-to-end object detection? This paper shows that the solution should be Dense Distinct Queries (DDQ). Concretely, we first lay dense queries like traditional detectors and then select distinct ones for one-to-one assignments. DDQ blends the advantages of traditional and recent end-to-end detectors and significantly improves the performance of various detectors including FCN, R-CNN, and DETRs. Most impressively, DDQ-DETR achieves 52.1 AP on MS-COCO dataset within 12 epochs using a ResNet-50 backbone, outperforming all existing detectors in the same setting. DDQ also shares the benefit of end-to-end detectors in crowded scenes and achieves 93.8 AP on CrowdHuman. We hope DDQ can inspire researchers to consider the complementarity between traditional methods and end-to-end detectors.
+
+
+
+## Results and Models
+
+| Model | Backbone | Lr schd | Augmentation | box AP(val) | Config | Download |
+| :---------------: | :------: | :-----: | :----------: | :---------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| DDQ DETR-4scale | R-50 | 12e | DETR | 51.4 | [config](./ddq-detr-4scale_r50_8xb2-12e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq-detr-4scale_r50_8xb2-12e_coco/ddq-detr-4scale_r50_8xb2-12e_coco_20230809_170711-42528127.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq-detr-4scale_r50_8xb2-12e_coco/ddq-detr-4scale_r50_8xb2-12e_coco_20230809_170711.log.json) |
+| DDQ DETR-5scale\* | R-50 | 12e | DETR | 52.1 | [config](./ddq-detr-5scale_r50_8xb2-12e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_5scale_coco_1x.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_5scale_coco_1x_20230319_103307.log) |
+| DDQ DETR-4scale\* | Swin-L | 30e | DETR | 58.7 | [config](./ddq-detr-4scale_swinl_8xb2-30e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_swinl_30e.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_swinl_30e_20230316_221721_20230318_143554.log) |
+
+**Note**
+
+- Models labeled * are not trained by us, but from [DDQ official website](https://github.com/jshilong/DDQ).
+- We find that the performance is unstable and may fluctuate by about 0.2 mAP.
+
+## Citation
+
+```latex
+@InProceedings{Zhang_2023_CVPR,
+ author = {Zhang, Shilong and Wang, Xinjiang and Wang, Jiaqi and Pang, Jiangmiao and Lyu, Chengqi and Zhang, Wenwei and Luo, Ping and Chen, Kai},
+ title = {Dense Distinct Query for End-to-End Object Detection},
+ booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
+ month = {June},
+ year = {2023},
+ pages = {7329-7338}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/ddq/ddq-detr-4scale_r50_8xb2-12e_coco.py b/grounding-dino/mmdetection/configs/ddq/ddq-detr-4scale_r50_8xb2-12e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5e64afc087e1ed68b8b5d1474127c832f893cb9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ddq/ddq-detr-4scale_r50_8xb2-12e_coco.py
@@ -0,0 +1,170 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='DDQDETR',
+ num_queries=900, # num_matching_queries
+ # ratio of num_dense queries to num_queries
+ dense_topk_ratio=1.5,
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ # encoder class name: DeformableDetrTransformerEncoder
+ encoder=dict(
+ num_layers=6,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=4,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0))), # 0.1 for DeformDETR
+ # decoder class name: DDQTransformerDecoder
+ decoder=dict(
+ # `num_layers` >= 2, because attention masks of the last
+ # `num_layers` - 1 layers are used for distinct query selection
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8,
+ dropout=0.0), # 0.1 for DeformDETR
+ cross_attn_cfg=dict(embed_dims=256, num_levels=4,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0)), # 0.1 for DeformDETR
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128,
+ normalize=True,
+ offset=0.0, # -0.5 for DeformDETR
+ temperature=20), # 10000 for DeformDETR
+ bbox_head=dict(
+ type='DDQDETRHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ dn_cfg=dict(
+ label_noise_scale=0.5,
+ box_noise_scale=1.0,
+ group_cfg=dict(dynamic=True, num_groups=None, num_dn_queries=100)),
+ dqs_cfg=dict(type='nms', iou_threshold=0.8),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='FocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=300))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False), pipeline=train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.05),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(custom_keys={'backbone': dict(lr_mult=0.1)}))
+
+# learning policy
+max_epochs = 12
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=0.0001,
+ by_epoch=False,
+ begin=0,
+ end=2000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/ddq/ddq-detr-5scale_r50_8xb2-12e_coco.py b/grounding-dino/mmdetection/configs/ddq/ddq-detr-5scale_r50_8xb2-12e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3c38f553bdd46bc4e0611bbd0fd4bab0c1929825
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ddq/ddq-detr-5scale_r50_8xb2-12e_coco.py
@@ -0,0 +1,171 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='DDQDETR',
+ num_queries=900, # num_matching_queries
+ # ratio of num_dense queries to num_queries
+ dense_topk_ratio=1.5,
+ with_box_refine=True,
+ as_two_stage=True,
+ num_feature_levels=5,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[256, 512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=5),
+ # encoder class name: DeformableDetrTransformerEncoder
+ encoder=dict(
+ num_layers=6,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=5,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0))), # 0.1 for DeformDETR
+ # decoder class name: DDQTransformerDecoder
+ decoder=dict(
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8,
+ dropout=0.0), # 0.1 for DeformDETR
+ cross_attn_cfg=dict(embed_dims=256, num_levels=5,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0)), # 0.1 for DeformDETR
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128,
+ normalize=True,
+ offset=0.0, # -0.5 for DeformDETR
+ temperature=20), # 10000 for DeformDETR
+ bbox_head=dict(
+ type='DDQDETRHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ dn_cfg=dict(
+ label_noise_scale=0.5,
+ box_noise_scale=1.0,
+ group_cfg=dict(dynamic=True, num_groups=None, num_dn_queries=100)),
+ dqs_cfg=dict(type='nms', iou_threshold=0.8),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='FocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=300))
+
+# train_pipeline, NOTE the img_scale and the Pad's size_divisor is different
+# from the default setting in mmdet.
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False), pipeline=train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.05),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(custom_keys={'backbone': dict(lr_mult=0.1)}))
+
+# learning policy
+max_epochs = 12
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=0.0001,
+ by_epoch=False,
+ begin=0,
+ end=2000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/ddq/metafile.yml b/grounding-dino/mmdetection/configs/ddq/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..bd33abe1a5122885913a1e8cbee60cb48014239f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ddq/metafile.yml
@@ -0,0 +1,56 @@
+Collections:
+ - Name: DDQ
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Multi Scale Train
+ - Gradient Clip
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - ResNet
+ - Transformer
+ Paper:
+ URL: https://arxiv.org/abs/2303.12776
+ Title: 'Dense Distinct Query for End-to-End Object Detection'
+ README: configs/ddq/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/dev-3.x/mmdet/models/detectors/ddq_detr.py#L21
+ Version: dev-3.x
+
+Models:
+ - Name: ddq-detr-4scale_r50_8xb2-12e_coco
+ In Collection: DDQ
+ Config: configs/ddq/ddq-detr-4scale_r50_8xb2-12e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 51.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq-detr-4scale_r50_8xb2-12e_coco/ddq-detr-4scale_r50_8xb2-12e_coco_20230809_170711-42528127.pth
+
+ - Name: ddq-detr-5scale_r50_8xb2-12e_coco
+ In Collection: DDQ
+ Config: configs/dino/ddq-detr-5scale_r50_8xb2-12e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 52.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_5scale_coco_1x.pth
+
+ - Name: ddq-detr-4scale_swinl_8xb2-30e_coco
+ In Collection: DDQ
+ Config: configs/dino/ddq-detr-4scale_swinl_8xb2-30e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 58.7
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/ddq/ddq_detr_swinl_30e.pth
diff --git a/grounding-dino/mmdetection/configs/deepfashion/README.md b/grounding-dino/mmdetection/configs/deepfashion/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..844e29d6a72906bc36fd682df270480af5a595c0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepfashion/README.md
@@ -0,0 +1,70 @@
+# DeepFashion
+
+> [DeepFashion: Powering Robust Clothes Recognition and Retrieval With Rich Annotations](https://openaccess.thecvf.com/content_cvpr_2016/html/Liu_DeepFashion_Powering_Robust_CVPR_2016_paper.html)
+
+
+
+## Abstract
+
+Recent advances in clothes recognition have been driven by the construction of clothes datasets. Existing datasets are limited in the amount of annotations and are difficult to cope with the various challenges in real-world applications. In this work, we introduce DeepFashion, a large-scale clothes dataset with comprehensive annotations. It contains over 800,000 images, which are richly annotated with massive attributes, clothing landmarks, and correspondence of images taken under different scenarios including store, street snapshot, and consumer. Such rich annotations enable the development of powerful algorithms in clothes recognition and facilitating future researches. To demonstrate the advantages of DeepFashion, we propose a new deep model, namely FashionNet, which learns clothing features by jointly predicting clothing attributes and landmarks. The estimated landmarks are then employed to pool or gate the learned features. It is optimized in an iterative manner. Extensive experiments demonstrate the effectiveness of FashionNet and the usefulness of DeepFashion.
+
+
+
+ +
+
+
+## Introduction
+
+[MMFashion](https://github.com/open-mmlab/mmfashion) develops "fashion parsing and segmentation" module
+based on the dataset
+[DeepFashion-Inshop](https://drive.google.com/drive/folders/0B7EVK8r0v71pVDZFQXRsMDZCX1E?usp=sharing).
+Its annotation follows COCO style.
+To use it, you need to first download the data. Note that we only use "img_highres" in this task.
+The file tree should be like this:
+
+```sh
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── DeepFashion
+│ │ ├── In-shop
+| │ │ ├── Anno
+| │ │ │ ├── segmentation
+| │ │ │ | ├── DeepFashion_segmentation_train.json
+| │ │ │ | ├── DeepFashion_segmentation_query.json
+| │ │ │ | ├── DeepFashion_segmentation_gallery.json
+| │ │ │ ├── list_bbox_inshop.txt
+| │ │ │ ├── list_description_inshop.json
+| │ │ │ ├── list_item_inshop.txt
+| │ │ │ └── list_landmarks_inshop.txt
+| │ │ ├── Eval
+| │ │ │ └── list_eval_partition.txt
+| │ │ ├── Img
+| │ │ │ ├── img
+| │ │ │ │ ├──XXX.jpg
+| │ │ │ ├── img_highres
+| │ │ │ └── ├──XXX.jpg
+
+```
+
+After that you can train the Mask RCNN r50 on DeepFashion-In-shop dataset by launching training with the `mask_rcnn_r50_fpn_1x.py` config
+or creating your own config file.
+
+## Results and Models
+
+| Backbone | Model type | Dataset | bbox detection Average Precision | segmentation Average Precision | Config | Download (Google) |
+| :------: | :--------: | :-----------------: | :------------------------------: | :----------------------------: | :----------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| ResNet50 | Mask RCNN | DeepFashion-In-shop | 0.599 | 0.584 | [config](./mask-rcnn_r50_fpn_15e_deepfashion.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/deepfashion/mask_rcnn_r50_fpn_15e_deepfashion/mask_rcnn_r50_fpn_15e_deepfashion_20200329_192752.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/deepfashion/mask_rcnn_r50_fpn_15e_deepfashion/20200329_192752.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{liuLQWTcvpr16DeepFashion,
+ author = {Liu, Ziwei and Luo, Ping and Qiu, Shi and Wang, Xiaogang and Tang, Xiaoou},
+ title = {DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations},
+ booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
+ month = {June},
+ year = {2016}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/deepfashion/mask-rcnn_r50_fpn_15e_deepfashion.py b/grounding-dino/mmdetection/configs/deepfashion/mask-rcnn_r50_fpn_15e_deepfashion.py
new file mode 100644
index 0000000000000000000000000000000000000000..403b18a4ca8ed61aedcb99218ecc79302826ff8c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepfashion/mask-rcnn_r50_fpn_15e_deepfashion.py
@@ -0,0 +1,23 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/deepfashion.py', '../_base_/schedules/schedule_1x.py',
+ '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(num_classes=15), mask_head=dict(num_classes=15)))
+# runtime settings
+max_epochs = 15
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/deepsort/README.md b/grounding-dino/mmdetection/configs/deepsort/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e50ec17eb55ffef4fb59dae43175b2688eedfaa9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepsort/README.md
@@ -0,0 +1,109 @@
+# Simple online and realtime tracking with a deep association metric
+
+## Abstract
+
+
+
+Simple Online and Realtime Tracking (SORT) is a pragmatic approach to multiple object tracking with a focus on simple, effective algorithms. In this paper, we integrate appearance information to improve the performance of SORT. Due to this extension we are able to track objects through longer periods of occlusions, effectively reducing the number of identity switches. In spirit of the original framework we place much of the computational complexity into an offline pre-training stage where we learn a deep association metric on a largescale person re-identification dataset. During online application, we establish measurement-to-track associations using nearest neighbor queries in visual appearance space. Experimental evaluation shows that our extensions reduce the number of identity switches by 45%, achieving overall competitive performance at high frame rates.
+
+
+
+
+
+  +
+
+
+## Results and models on MOT17
+
+Currently we do not support training ReID models for DeepSORT.
+We directly use the ReID model from [Tracktor](https://github.com/phil-bergmann/tracking_wo_bnw). These missed features will be supported in the future.
+
+| Method | Detector | ReID | Train Set | Test Set | Public | Inf time (fps) | HOTA | MOTA | IDF1 | FP | FN | IDSw. | Config | Download |
+| :------: | :----------------: | :--: | :--------: | :------: | :----: | :------------: | :--: | :--: | :--: | :---: | :---: | :---: | :--------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| DeepSORT | R50-FasterRCNN-FPN | R50 | half-train | half-val | N | 13.8 | 57.0 | 63.7 | 69.5 | 15063 | 40323 | 3276 | [config](deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py) | [detector](https://download.openmmlab.com/mmtracking/mot/faster_rcnn/faster-rcnn_r50_fpn_4e_mot17-half-64ee2ed4.pth) [reid](https://download.openmmlab.com/mmtracking/mot/reid/tracktor_reid_r50_iter25245-a452f51f.pth) |
+
+## Get started
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Prepare
+
+Tracking Dataset Prepare can refer to this [document](../../docs/en/user_guides/tracking_dataset_prepare.md).
+
+### 3. Training
+
+We implement DeepSORT with independent detector and ReID models.
+Note that, due to the influence of parameters such as learning rate in default configuration file,
+we recommend using 8 GPUs for training in order to reproduce accuracy.
+
+You can train the detector as follows.
+
+```shell script
+# Training Faster R-CNN on mot17-half-train dataset with following command.
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_train.sh configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py 8
+```
+
+If you want to know about more detailed usage of `train.py/dist_train.sh/slurm_train.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 4. Testing and evaluation
+
+### 4.1 Example on MOTxx-halfval dataset
+
+**4.1.1 use separate trained detector and reid model to evaluating and testing**
+
+```shell
+# Example 1: Test on motXX-half-val set.
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_test_tracking.sh configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py 8 --detector ${DETECTOR_CHECKPOINT_PATH} --reid ${REID_CHECKPOINT_PATH}
+```
+
+**4.1.2 use video_baesd to evaluating and testing**
+
+we also provide two_ways(img_based or video_based) to evaluating and testing.
+if you want to use video_based to evaluating and testing, you can modify config as follows
+
+```
+val_dataloader = dict(
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False))
+```
+
+### 4.2 Example on MOTxx-test dataset
+
+If you want to get the results of the [MOT Challenge](https://motchallenge.net/) test set,
+please use the following command to generate result files that can be used for submission.
+It will be stored in `./mot_17_test_res`, you can modify the saved path in `test_evaluator` of the config.
+
+```shell script
+# Example 2: Test on motxx-test set
+# The number after config file represents the number of GPUs used
+bash tools/dist_test_tracking.sh configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17test 8 --detector ${DETECTOR_CHECKPOINT_PATH} --reid ${REID_CHECKPOINT_PATH}
+```
+
+If you want to know about more detailed usage of `test_tracking.py/dist_test_tracking.sh/slurm_test_tracking.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 5.Inference
+
+Use a single GPU to predict a video and save it as a video.
+
+```shell
+python demo/mot_demo.py demo/demo_mot.mp4 configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17test --detector ${DETECTOR_CHECKPOINT_PATH} --reid ${REID_CHECKPOINT_PATH} --out mot.mp4
+```
+
+## Citation
+
+
+
+```latex
+@inproceedings{wojke2017simple,
+ title={Simple online and realtime tracking with a deep association metric},
+ author={Wojke, Nicolai and Bewley, Alex and Paulus, Dietrich},
+ booktitle={2017 IEEE international conference on image processing (ICIP)},
+ pages={3645--3649},
+ year={2017},
+ organization={IEEE}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py b/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
new file mode 100644
index 0000000000000000000000000000000000000000..70d3393829b422740bfba5d1746c7651e9c2d69c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
@@ -0,0 +1,85 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/mot_challenge.py', '../_base_/default_runtime.py'
+]
+
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=1),
+ visualization=dict(type='TrackVisualizationHook', draw=False))
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='TrackLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+# custom hooks
+custom_hooks = [
+ # Synchronize model buffers such as running_mean and running_var in BN
+ # at the end of each epoch
+ dict(type='SyncBuffersHook')
+]
+
+detector = _base_.model
+detector.pop('data_preprocessor')
+detector.rpn_head.bbox_coder.update(dict(clip_border=False))
+detector.roi_head.bbox_head.update(dict(num_classes=1))
+detector.roi_head.bbox_head.bbox_coder.update(dict(clip_border=False))
+detector['init_cfg'] = dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmtracking/mot/faster_rcnn/'
+ 'faster-rcnn_r50_fpn_4e_mot17-half-64ee2ed4.pth')
+del _base_.model
+
+model = dict(
+ type='DeepSORT',
+ data_preprocessor=dict(
+ type='TrackDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ detector=detector,
+ reid=dict(
+ type='BaseReID',
+ data_preprocessor=dict(type='mmpretrain.ClsDataPreprocessor'),
+ backbone=dict(
+ type='mmpretrain.ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ style='pytorch'),
+ neck=dict(type='GlobalAveragePooling', kernel_size=(8, 4), stride=1),
+ head=dict(
+ type='LinearReIDHead',
+ num_fcs=1,
+ in_channels=2048,
+ fc_channels=1024,
+ out_channels=128,
+ num_classes=380,
+ loss_cls=dict(type='mmpretrain.CrossEntropyLoss', loss_weight=1.0),
+ loss_triplet=dict(type='TripletLoss', margin=0.3, loss_weight=1.0),
+ norm_cfg=dict(type='BN1d'),
+ act_cfg=dict(type='ReLU')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmtracking/mot/reid/tracktor_reid_r50_iter25245-a452f51f.pth' # noqa: E501
+ )),
+ tracker=dict(
+ type='SORTTracker',
+ motion=dict(type='KalmanFilter', center_only=False),
+ obj_score_thr=0.5,
+ reid=dict(
+ num_samples=10,
+ img_scale=(256, 128),
+ img_norm_cfg=None,
+ match_score_thr=2.0),
+ match_iou_thr=0.5,
+ momentums=None,
+ num_tentatives=2,
+ num_frames_retain=100))
+
+train_dataloader = None
+
+train_cfg = None
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
diff --git a/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17test.py b/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17test.py
new file mode 100644
index 0000000000000000000000000000000000000000..687ce7adfcc1742bab75cca939a99df37b43689c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17test.py
@@ -0,0 +1,15 @@
+_base_ = [
+ './deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain'
+ '_test-mot17halfval.py'
+]
+
+# dataloader
+val_dataloader = dict(
+ dataset=dict(ann_file='annotations/train_cocoformat.json'))
+test_dataloader = dict(
+ dataset=dict(
+ ann_file='annotations/test_cocoformat.json',
+ data_prefix=dict(img_path='test')))
+
+# evaluator
+test_evaluator = dict(format_only=True, outfile_prefix='./mot_17_test_res')
diff --git a/grounding-dino/mmdetection/configs/deepsort/metafile.yml b/grounding-dino/mmdetection/configs/deepsort/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2feb358e93d1590f0305e2ed08ae40e18bbd6cb9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deepsort/metafile.yml
@@ -0,0 +1,37 @@
+Collections:
+ - Name: DeepSORT
+ Metadata:
+ Training Techniques:
+ - SGD with Momentum
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ - FPN
+ Paper:
+ URL: https://arxiv.org/abs/1703.07402
+ Title: Simple Online and Realtime Tracking with a Deep Association Metric
+ README: configs/deepsort/README.md
+
+Models:
+ - Name: deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval
+ In Collection: DeepSORT
+ Config: configs/deepsort/deepsort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
+ Metadata:
+ Training Data: MOT17-half-train
+ inference time (ms/im):
+ - value: 72.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (640, 1088)
+ Results:
+ - Task: Multiple Object Tracking
+ Dataset: MOT17-half-val
+ Metrics:
+ MOTA: 63.7
+ IDF1: 69.5
+ HOTA: 57.0
+ Weights:
+ - https://download.openmmlab.com/mmtracking/mot/faster_rcnn/faster-rcnn_r50_fpn_4e_mot17-half-64ee2ed4.pth
+ - https://download.openmmlab.com/mmtracking/mot/reid/tracktor_reid_r50_iter25245-a452f51f.pth
diff --git a/grounding-dino/mmdetection/configs/deformable_detr/README.md b/grounding-dino/mmdetection/configs/deformable_detr/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ca897cdb4cfc17b1d194d2aeaba7feea388839f0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deformable_detr/README.md
@@ -0,0 +1,41 @@
+# Deformable DETR
+
+> [Deformable DETR: Deformable Transformers for End-to-End Object Detection](https://arxiv.org/abs/2010.04159)
+
+
+
+## Abstract
+
+DETR has been recently proposed to eliminate the need for many hand-designed components in object detection while demonstrating good performance. However, it suffers from slow convergence and limited feature spatial resolution, due to the limitation of Transformer attention modules in processing image feature maps. To mitigate these issues, we proposed Deformable DETR, whose attention modules only attend to a small set of key sampling points around a reference. Deformable DETR can achieve better performance than DETR (especially on small objects) with 10 times less training epochs. Extensive experiments on the COCO benchmark demonstrate the effectiveness of our approach.
+
+
+
+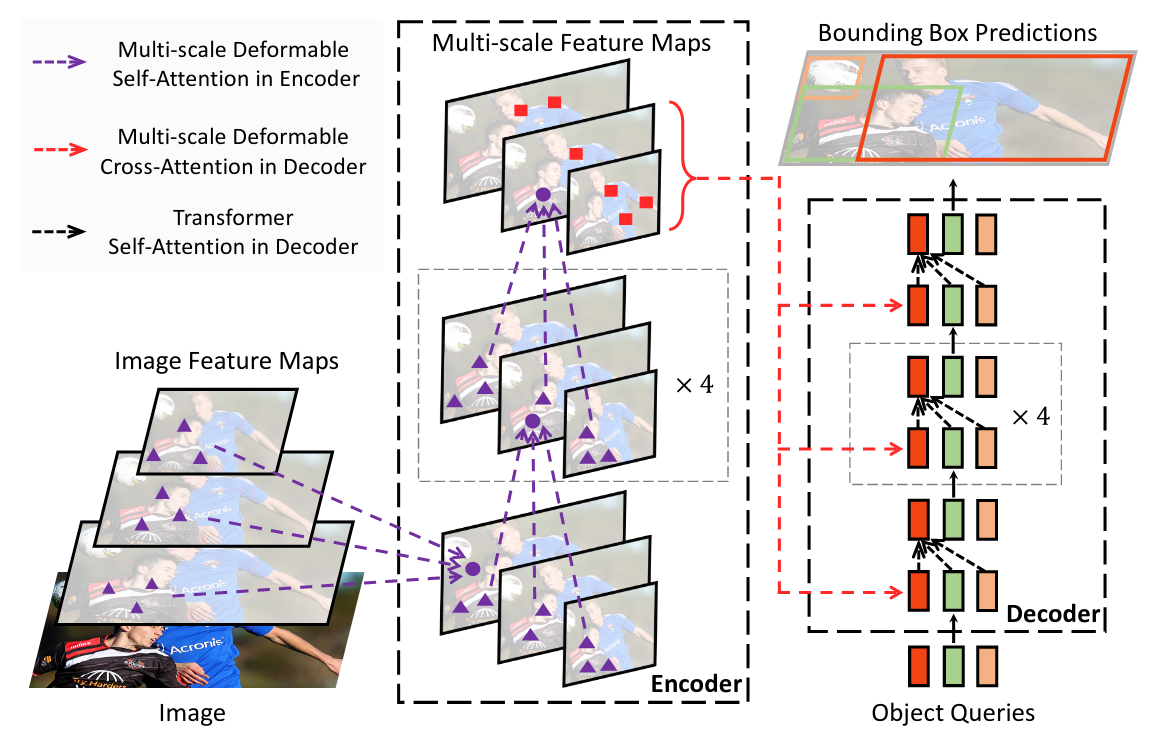 +
+
+
+## Results and Models
+
+| Backbone | Model | Lr schd | box AP | Config | Download |
+| :------: | :---------------------------------: | :-----: | :----: | :---------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | Deformable DETR | 50e | 44.3 | [config](./deformable-detr_r50_16xb2-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco_20221029_210934-6bc7d21b.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco_20221029_210934.log.json) |
+| R-50 | + iterative bounding box refinement | 50e | 46.2 | [config](./deformable-detr-refine_r50_16xb2-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco/deformable-detr-refine_r50_16xb2-50e_coco_20221022_225303-844e0f93.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco/deformable-detr-refine_r50_16xb2-50e_coco_20221022_225303.log.json) |
+| R-50 | ++ two-stage Deformable DETR | 50e | 47.0 | [config](./deformable-detr-refine-twostage_r50_16xb2-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco/deformable-detr-refine-twostage_r50_16xb2-50e_coco_20221021_184714-acc8a5ff.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco/deformable-detr-refine-twostage_r50_16xb2-50e_coco_20221021_184714.log.json) |
+
+### NOTE
+
+1. All models are trained with batch size 32.
+2. The performance is unstable. `Deformable DETR` and `iterative bounding box refinement` may fluctuate about 0.3 mAP. `two-stage Deformable DETR` may fluctuate about 0.2 mAP.
+
+## Citation
+
+We provide the config files for Deformable DETR: [Deformable DETR: Deformable Transformers for End-to-End Object Detection](https://arxiv.org/abs/2010.04159).
+
+```latex
+@inproceedings{
+zhu2021deformable,
+title={Deformable DETR: Deformable Transformers for End-to-End Object Detection},
+author={Xizhou Zhu and Weijie Su and Lewei Lu and Bin Li and Xiaogang Wang and Jifeng Dai},
+booktitle={International Conference on Learning Representations},
+year={2021},
+url={https://openreview.net/forum?id=gZ9hCDWe6ke}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco.py b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..eeb67fc98486cfd929a8177b9af6be3cdab9aa4b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco.py
@@ -0,0 +1,2 @@
+_base_ = 'deformable-detr-refine_r50_16xb2-50e_coco.py'
+model = dict(as_two_stage=True)
diff --git a/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco.py b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b968674f4a9fc450803cdba018b0c4e9e6ca422a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco.py
@@ -0,0 +1,2 @@
+_base_ = 'deformable-detr_r50_16xb2-50e_coco.py'
+model = dict(with_box_refine=True)
diff --git a/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e0dee411c8e27ab440ccc874e40f4207b24a21e7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py
@@ -0,0 +1,156 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='DeformableDETR',
+ num_queries=300,
+ num_feature_levels=4,
+ with_box_refine=False,
+ as_two_stage=False,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ encoder=dict( # DeformableDetrTransformerEncoder
+ num_layers=6,
+ layer_cfg=dict( # DeformableDetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=1024, ffn_drop=0.1))),
+ decoder=dict( # DeformableDetrTransformerDecoder
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict( # DeformableDetrTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=1024, ffn_drop=0.1)),
+ post_norm_cfg=None),
+ positional_encoding=dict(num_feats=128, normalize=True, offset=-0.5),
+ bbox_head=dict(
+ type='DeformableDETRHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=2.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='FocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=100))
+
+# train_pipeline, NOTE the img_scale and the Pad's size_divisor is different
+# from the default setting in mmdet.
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False), pipeline=train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'backbone': dict(lr_mult=0.1),
+ 'sampling_offsets': dict(lr_mult=0.1),
+ 'reference_points': dict(lr_mult=0.1)
+ }))
+
+# learning policy
+max_epochs = 50
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[40],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (16 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=32)
diff --git a/grounding-dino/mmdetection/configs/deformable_detr/metafile.yml b/grounding-dino/mmdetection/configs/deformable_detr/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a30c97914baf6f1ec56cea8fd67b5ad1efb574fe
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/deformable_detr/metafile.yml
@@ -0,0 +1,56 @@
+Collections:
+ - Name: Deformable DETR
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Multi Scale Train
+ - Gradient Clip
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ - Transformer
+ Paper:
+ URL: https://openreview.net/forum?id=gZ9hCDWe6ke
+ Title: 'Deformable DETR: Deformable Transformers for End-to-End Object Detection'
+ README: configs/deformable_detr/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.12.0/mmdet/models/detectors/deformable_detr.py#L6
+ Version: v2.12.0
+
+Models:
+ - Name: deformable-detr_r50_16xb2-50e_coco
+ In Collection: Deformable DETR
+ Config: configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py
+ Metadata:
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco_20221029_210934-6bc7d21b.pth
+
+ - Name: deformable-detr-refine_r50_16xb2-50e_coco
+ In Collection: Deformable DETR
+ Config: configs/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco.py
+ Metadata:
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.2
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine_r50_16xb2-50e_coco/deformable-detr-refine_r50_16xb2-50e_coco_20221022_225303-844e0f93.pth
+
+ - Name: deformable-detr-refine-twostage_r50_16xb2-50e_coco
+ In Collection: Deformable DETR
+ Config: configs/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco.py
+ Metadata:
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.0
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/deformable_detr/deformable-detr-refine-twostage_r50_16xb2-50e_coco/deformable-detr-refine-twostage_r50_16xb2-50e_coco_20221021_184714-acc8a5ff.pth
diff --git a/grounding-dino/mmdetection/configs/detectors/README.md b/grounding-dino/mmdetection/configs/detectors/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..2918d6e4f1072428bbefcfcd05e139fc590766aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/README.md
@@ -0,0 +1,69 @@
+# DetectoRS
+
+> [DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution](https://arxiv.org/abs/2006.02334)
+
+
+
+## Abstract
+
+Many modern object detectors demonstrate outstanding performances by using the mechanism of looking and thinking twice. In this paper, we explore this mechanism in the backbone design for object detection. At the macro level, we propose Recursive Feature Pyramid, which incorporates extra feedback connections from Feature Pyramid Networks into the bottom-up backbone layers. At the micro level, we propose Switchable Atrous Convolution, which convolves the features with different atrous rates and gathers the results using switch functions. Combining them results in DetectoRS, which significantly improves the performances of object detection. On COCO test-dev, DetectoRS achieves state-of-the-art 55.7% box AP for object detection, 48.5% mask AP for instance segmentation, and 50.0% PQ for panoptic segmentation.
+
+
+
+ +
+
+
+## Introduction
+
+DetectoRS requires COCO and [COCO-stuff](http://calvin.inf.ed.ac.uk/wp-content/uploads/data/cocostuffdataset/stuffthingmaps_trainval2017.zip) dataset for training. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+| | ├── stuffthingmaps
+```
+
+## Results and Models
+
+DetectoRS includes two major components:
+
+- Recursive Feature Pyramid (RFP).
+- Switchable Atrous Convolution (SAC).
+
+They can be used independently.
+Combining them together results in DetectoRS.
+The results on COCO 2017 val are shown in the below table.
+
+| Method | Detector | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :-----------------: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| RFP | Cascade + ResNet-50 | 1x | 7.5 | - | 44.8 | | [config](./cascade-rcnn_r50-rfp_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_rfp_1x_coco/cascade_rcnn_r50_rfp_1x_coco-8cf51bfd.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_rfp_1x_coco/cascade_rcnn_r50_rfp_1x_coco_20200624_104126.log.json) |
+| SAC | Cascade + ResNet-50 | 1x | 5.6 | - | 45.0 | | [config](./cascade-rcnn_r50-sac_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_sac_1x_coco/cascade_rcnn_r50_sac_1x_coco-24bfda62.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_sac_1x_coco/cascade_rcnn_r50_sac_1x_coco_20200624_104402.log.json) |
+| DetectoRS | Cascade + ResNet-50 | 1x | 9.9 | - | 47.4 | | [config](./detectors_cascade-rcnn_r50_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_cascade_rcnn_r50_1x_coco/detectors_cascade_rcnn_r50_1x_coco-32a10ba0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_cascade_rcnn_r50_1x_coco/detectors_cascade_rcnn_r50_1x_coco_20200706_001203.log.json) |
+| RFP | HTC + ResNet-50 | 1x | 11.2 | - | 46.6 | 40.9 | [config](./htc_r50-rfp_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_rfp_1x_coco/htc_r50_rfp_1x_coco-8ff87c51.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_rfp_1x_coco/htc_r50_rfp_1x_coco_20200624_103053.log.json) |
+| SAC | HTC + ResNet-50 | 1x | 9.3 | - | 46.4 | 40.9 | [config](./htc_r50-sac_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_sac_1x_coco/htc_r50_sac_1x_coco-bfa60c54.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_sac_1x_coco/htc_r50_sac_1x_coco_20200624_103111.log.json) |
+| DetectoRS | HTC + ResNet-50 | 1x | 13.6 | - | 49.1 | 42.6 | [config](./detectors_htc-r50_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_htc_r50_1x_coco/detectors_htc_r50_1x_coco-329b1453.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_htc_r50_1x_coco/detectors_htc_r50_1x_coco_20200624_103659.log.json) |
+| DetectoRS | HTC + ResNet-101 | 20e | 19.6 | | 50.5 | 43.9 | [config](./detectors_htc-r101_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_htc_r101_20e_coco/detectors_htc_r101_20e_coco_20210419_203638-348d533b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_htc_r101_20e_coco/detectors_htc_r101_20e_coco_20210419_203638.log.json) |
+
+*Note*: This is a re-implementation based on MMDetection-V2.
+The original implementation is based on MMDetection-V1.
+
+## Citation
+
+We provide the config files for [DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution](https://arxiv.org/pdf/2006.02334.pdf).
+
+```latex
+@article{qiao2020detectors,
+ title={DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution},
+ author={Qiao, Siyuan and Chen, Liang-Chieh and Yuille, Alan},
+ journal={arXiv preprint arXiv:2006.02334},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-rfp_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-rfp_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c30c84d74cf68bc4369db16b6b2602626acb6fdf
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-rfp_1x_coco.py
@@ -0,0 +1,28 @@
+_base_ = [
+ '../_base_/models/cascade-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ output_img=True),
+ neck=dict(
+ type='RFP',
+ rfp_steps=2,
+ aspp_out_channels=64,
+ aspp_dilations=(1, 3, 6, 1),
+ rfp_backbone=dict(
+ rfp_inplanes=256,
+ type='DetectoRS_ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ conv_cfg=dict(type='ConvAWS'),
+ pretrained='torchvision://resnet50',
+ style='pytorch')))
diff --git a/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-sac_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-sac_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..24d6cd3a95ecf262caac667cfcc32d6885fa5880
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/cascade-rcnn_r50-sac_1x_coco.py
@@ -0,0 +1,12 @@
+_base_ = [
+ '../_base_/models/cascade-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True)))
diff --git a/grounding-dino/mmdetection/configs/detectors/detectors_cascade-rcnn_r50_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/detectors_cascade-rcnn_r50_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..19d13d9c8c38b666b7481a58a641918b5d20e0ad
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/detectors_cascade-rcnn_r50_1x_coco.py
@@ -0,0 +1,32 @@
+_base_ = [
+ '../_base_/models/cascade-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ output_img=True),
+ neck=dict(
+ type='RFP',
+ rfp_steps=2,
+ aspp_out_channels=64,
+ aspp_dilations=(1, 3, 6, 1),
+ rfp_backbone=dict(
+ rfp_inplanes=256,
+ type='DetectoRS_ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ pretrained='torchvision://resnet50',
+ style='pytorch')))
diff --git a/grounding-dino/mmdetection/configs/detectors/detectors_htc-r101_20e_coco.py b/grounding-dino/mmdetection/configs/detectors/detectors_htc-r101_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..93d7d2b1adeb3fbdb7bac0107edf4433669e8015
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/detectors_htc-r101_20e_coco.py
@@ -0,0 +1,28 @@
+_base_ = '../htc/htc_r101_fpn_20e_coco.py'
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ output_img=True),
+ neck=dict(
+ type='RFP',
+ rfp_steps=2,
+ aspp_out_channels=64,
+ aspp_dilations=(1, 3, 6, 1),
+ rfp_backbone=dict(
+ rfp_inplanes=256,
+ type='DetectoRS_ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ pretrained='torchvision://resnet101',
+ style='pytorch')))
diff --git a/grounding-dino/mmdetection/configs/detectors/detectors_htc-r50_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/detectors_htc-r50_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0d2fc4f77fcca715c1dfb613306d214b636aa0c0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/detectors_htc-r50_1x_coco.py
@@ -0,0 +1,28 @@
+_base_ = '../htc/htc_r50_fpn_1x_coco.py'
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ output_img=True),
+ neck=dict(
+ type='RFP',
+ rfp_steps=2,
+ aspp_out_channels=64,
+ aspp_dilations=(1, 3, 6, 1),
+ rfp_backbone=dict(
+ rfp_inplanes=256,
+ type='DetectoRS_ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True),
+ pretrained='torchvision://resnet50',
+ style='pytorch')))
diff --git a/grounding-dino/mmdetection/configs/detectors/htc_r50-rfp_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/htc_r50-rfp_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..496104e12550a1985f9c9e3748a343f69d7df6d8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/htc_r50-rfp_1x_coco.py
@@ -0,0 +1,24 @@
+_base_ = '../htc/htc_r50_fpn_1x_coco.py'
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ output_img=True),
+ neck=dict(
+ type='RFP',
+ rfp_steps=2,
+ aspp_out_channels=64,
+ aspp_dilations=(1, 3, 6, 1),
+ rfp_backbone=dict(
+ rfp_inplanes=256,
+ type='DetectoRS_ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ conv_cfg=dict(type='ConvAWS'),
+ pretrained='torchvision://resnet50',
+ style='pytorch')))
diff --git a/grounding-dino/mmdetection/configs/detectors/htc_r50-sac_1x_coco.py b/grounding-dino/mmdetection/configs/detectors/htc_r50-sac_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..72d4db963ffd95851b945911b3db9941426583ab
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/htc_r50-sac_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../htc/htc_r50_fpn_1x_coco.py'
+
+model = dict(
+ backbone=dict(
+ type='DetectoRS_ResNet',
+ conv_cfg=dict(type='ConvAWS'),
+ sac=dict(type='SAC', use_deform=True),
+ stage_with_sac=(False, True, True, True)))
diff --git a/grounding-dino/mmdetection/configs/detectors/metafile.yml b/grounding-dino/mmdetection/configs/detectors/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..196a1cef1751bc9d5812915c4d06de220f62baa1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detectors/metafile.yml
@@ -0,0 +1,114 @@
+Collections:
+ - Name: DetectoRS
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ASPP
+ - FPN
+ - RFP
+ - RPN
+ - ResNet
+ - RoIAlign
+ - SAC
+ Paper:
+ URL: https://arxiv.org/abs/2006.02334
+ Title: 'DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution'
+ README: configs/detectors/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.2.0/mmdet/models/backbones/detectors_resnet.py#L205
+ Version: v2.2.0
+
+Models:
+ - Name: cascade-rcnn_r50-rfp_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/cascade-rcnn_r50-rfp_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.5
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_rfp_1x_coco/cascade_rcnn_r50_rfp_1x_coco-8cf51bfd.pth
+
+ - Name: cascade-rcnn_r50-sac_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/cascade-rcnn_r50-sac_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/cascade_rcnn_r50_sac_1x_coco/cascade_rcnn_r50_sac_1x_coco-24bfda62.pth
+
+ - Name: detectors_cascade-rcnn_r50_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/detectors_cascade-rcnn_r50_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.9
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_cascade_rcnn_r50_1x_coco/detectors_cascade_rcnn_r50_1x_coco-32a10ba0.pth
+
+ - Name: htc_r50-rfp_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/htc_r50-rfp_1x_coco.py
+ Metadata:
+ Training Memory (GB): 11.2
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_rfp_1x_coco/htc_r50_rfp_1x_coco-8ff87c51.pth
+
+ - Name: htc_r50-sac_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/htc_r50-sac_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.3
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/htc_r50_sac_1x_coco/htc_r50_sac_1x_coco-bfa60c54.pth
+
+ - Name: detectors_htc-r50_1x_coco
+ In Collection: DetectoRS
+ Config: configs/detectors/detectors_htc-r50_1x_coco.py
+ Metadata:
+ Training Memory (GB): 13.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/detectors/detectors_htc_r50_1x_coco/detectors_htc_r50_1x_coco-329b1453.pth
diff --git a/grounding-dino/mmdetection/configs/detr/README.md b/grounding-dino/mmdetection/configs/detr/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..8e843f369be40cac73bbc098d6bb04097de0a722
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/README.md
@@ -0,0 +1,37 @@
+# DETR
+
+> [End-to-End Object Detection with Transformers](https://arxiv.org/abs/2005.12872)
+
+
+
+## Abstract
+
+We present a new method that views object detection as a direct set prediction problem. Our approach streamlines the detection pipeline, effectively removing the need for many hand-designed components like a non-maximum suppression procedure or anchor generation that explicitly encode our prior knowledge about the task. The main ingredients of the new framework, called DEtection TRansformer or DETR, are a set-based global loss that forces unique predictions via bipartite matching, and a transformer encoder-decoder architecture. Given a fixed small set of learned object queries, DETR reasons about the relations of the objects and the global image context to directly output the final set of predictions in parallel. The new model is conceptually simple and does not require a specialized library, unlike many other modern detectors. DETR demonstrates accuracy and run-time performance on par with the well-established and highly-optimized Faster RCNN baseline on the challenging COCO object detection dataset. Moreover, DETR can be easily generalized to produce panoptic segmentation in a unified manner. We show that it significantly outperforms competitive baselines.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Model | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :---: | :-----: | :------: | :------------: | :----: | :------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | DETR | 150e | 7.9 | | 39.9 | [config](./detr_r50_8xb2-150e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/detr/detr_r50_8xb2-150e_coco/detr_r50_8xb2-150e_coco_20221023_153551-436d03e8.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/detr/detr_r50_8xb2-150e_coco/detr_r50_8xb2-150e_coco_20221023_153551.log.json) |
+
+## Citation
+
+We provide the config files for DETR: [End-to-End Object Detection with Transformers](https://arxiv.org/abs/2005.12872).
+
+```latex
+@inproceedings{detr,
+ author = {Nicolas Carion and
+ Francisco Massa and
+ Gabriel Synnaeve and
+ Nicolas Usunier and
+ Alexander Kirillov and
+ Sergey Zagoruyko},
+ title = {End-to-End Object Detection with Transformers},
+ booktitle = {ECCV},
+ year = {2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/detr/detr_r101_8xb2-500e_coco.py b/grounding-dino/mmdetection/configs/detr/detr_r101_8xb2-500e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6661aacdc54e889aa38b2e759c40fd9797ae44ad
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/detr_r101_8xb2-500e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './detr_r50_8xb2-500e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/detr/detr_r18_8xb2-500e_coco.py b/grounding-dino/mmdetection/configs/detr/detr_r18_8xb2-500e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..305b9d6fee8d75273b588f32b2e21582473cb137
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/detr_r18_8xb2-500e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './detr_r50_8xb2-500e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[512]))
diff --git a/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-150e_coco.py b/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-150e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..aaa15410532e552cae387ef4eaa57227af1d855d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-150e_coco.py
@@ -0,0 +1,155 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='DETR',
+ num_queries=100,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=None,
+ num_outs=1),
+ encoder=dict( # DetrTransformerEncoder
+ num_layers=6,
+ layer_cfg=dict( # DetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.1,
+ act_cfg=dict(type='ReLU', inplace=True)))),
+ decoder=dict( # DetrTransformerDecoder
+ num_layers=6,
+ layer_cfg=dict( # DetrTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.1,
+ act_cfg=dict(type='ReLU', inplace=True))),
+ return_intermediate=True),
+ positional_encoding=dict(num_feats=128, normalize=True),
+ bbox_head=dict(
+ type='DETRHead',
+ num_classes=80,
+ embed_dims=256,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ bg_cls_weight=0.1,
+ use_sigmoid=False,
+ loss_weight=1.0,
+ class_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='ClassificationCost', weight=1.),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=100))
+
+# train_pipeline, NOTE the img_scale and the Pad's size_divisor is different
+# from the default setting in mmdet.
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[[
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(400, 1333), (500, 1333), (600, 1333)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333),
+ (576, 1333), (608, 1333), (640, 1333),
+ (672, 1333), (704, 1333), (736, 1333),
+ (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]]),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(
+ custom_keys={'backbone': dict(lr_mult=0.1, decay_mult=1.0)}))
+
+# learning policy
+max_epochs = 150
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[100],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-500e_coco.py b/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-500e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f07d5dce05b08c74aea2059989b45d5d275c53e0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/detr_r50_8xb2-500e_coco.py
@@ -0,0 +1,24 @@
+_base_ = './detr_r50_8xb2-150e_coco.py'
+
+# learning policy
+max_epochs = 500
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=10)
+
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[334],
+ gamma=0.1)
+]
+
+# only keep latest 2 checkpoints
+default_hooks = dict(checkpoint=dict(max_keep_ckpts=2))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/detr/metafile.yml b/grounding-dino/mmdetection/configs/detr/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a9132dff0228e31c146ae46ed32445491f4225c1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/detr/metafile.yml
@@ -0,0 +1,33 @@
+Collections:
+ - Name: DETR
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Multi Scale Train
+ - Gradient Clip
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ - Transformer
+ Paper:
+ URL: https://arxiv.org/abs/2005.12872
+ Title: 'End-to-End Object Detection with Transformers'
+ README: configs/detr/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/detectors/detr.py#L7
+ Version: v2.7.0
+
+Models:
+ - Name: detr_r50_8xb2-150e_coco
+ In Collection: DETR
+ Config: configs/detr/detr_r50_8xb2-150e_coco.py
+ Metadata:
+ Training Memory (GB): 7.9
+ Epochs: 150
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/detr/detr_r50_8xb2-150e_coco/detr_r50_8xb2-150e_coco_20221023_153551-436d03e8.pth
diff --git a/grounding-dino/mmdetection/configs/dino/README.md b/grounding-dino/mmdetection/configs/dino/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..d8a01bde25582023ab65c0304faa8ef14340a27a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/README.md
@@ -0,0 +1,40 @@
+# DINO
+
+> [DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection](https://arxiv.org/abs/2203.03605)
+
+
+
+## Abstract
+
+We present DINO (DETR with Improved deNoising anchOr boxes), a state-of-the-art end-to-end object detector. DINO improves over previous DETR-like models in performance and efficiency by using a contrastive way for denoising training, a mixed query selection method for anchor initialization, and a look forward twice scheme for box prediction. DINO achieves 49.4AP in 12 epochs and 51.3AP in 24 epochs on COCO with a ResNet-50 backbone and multi-scale features, yielding a significant improvement of +6.0AP and +2.7AP, respectively, compared to DN-DETR, the previous best DETR-like model. DINO scales well in both model size and data size. Without bells and whistles, after pre-training on the Objects365 dataset with a SwinL backbone, DINO obtains the best results on both COCO val2017 (63.2AP) and test-dev (63.3AP). Compared to other models on the leaderboard, DINO significantly reduces its model size and pre-training data size while achieving better results.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Model | Lr schd | Better-Hyper | box AP | Config | Download |
+| :------: | :---------: | :-----: | :----------: | :----: | :---------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | DINO-4scale | 12e | False | 49.0 | [config](./dino-4scale_r50_8xb2-12e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_8xb2-12e_coco/dino-4scale_r50_8xb2-12e_coco_20221202_182705-55b2bba2.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_8xb2-12e_coco/dino-4scale_r50_8xb2-12e_coco_20221202_182705.log.json) |
+| R-50 | DINO-4scale | 12e | True | 50.1 | [config](./dino-4scale_r50_improved_8xb2-12e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_improved_8xb2-12e_coco/dino-4scale_r50_improved_8xb2-12e_coco_20230818_162607-6f47a913.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_improved_8xb2-12e_coco/dino-4scale_r50_improved_8xb2-12e_coco_20230818_162607.log.json) |
+| Swin-L | DINO-5scale | 12e | False | 57.2 | [config](./dino-5scale_swin-l_8xb2-12e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-5scale_swin-l_8xb2-12e_coco/dino-5scale_swin-l_8xb2-12e_coco_20230228_072924-a654145f.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/dino/dino-5scale_swin-l_8xb2-12e_coco/dino-5scale_swin-l_8xb2-12e_coco_20230228_072924.log) |
+| Swin-L | DINO-5scale | 36e | False | 58.4 | [config](./dino-5scale_swin-l_8xb2-36e_coco.py) | [model](https://github.com/RistoranteRist/mmlab-weights/releases/download/dino-swinl/dino-5scale_swin-l_8xb2-36e_coco-5486e051.pth) \| [log](https://github.com/RistoranteRist/mmlab-weights/releases/download/dino-swinl/20230307_032359.log) |
+
+### NOTE
+
+The performance is unstable. `DINO-4scale` with `R-50` may fluctuate about 0.4 mAP.
+
+## Citation
+
+We provide the config files for DINO: [DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection](https://arxiv.org/abs/2203.03605).
+
+```latex
+@misc{zhang2022dino,
+ title={DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection},
+ author={Hao Zhang and Feng Li and Shilong Liu and Lei Zhang and Hang Su and Jun Zhu and Lionel M. Ni and Heung-Yeung Shum},
+ year={2022},
+ eprint={2203.03605},
+ archivePrefix={arXiv},
+ primaryClass={cs.CV}}
+```
diff --git a/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-12e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-12e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5831f898b4a706accb2b828b6194b2974e78d0fc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-12e_coco.py
@@ -0,0 +1,163 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='DINO',
+ num_queries=900, # num_matching_queries
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ encoder=dict(
+ num_layers=6,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=4,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0))), # 0.1 for DeformDETR
+ decoder=dict(
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_heads=8,
+ dropout=0.0), # 0.1 for DeformDETR
+ cross_attn_cfg=dict(embed_dims=256, num_levels=4,
+ dropout=0.0), # 0.1 for DeformDETR
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048, # 1024 for DeformDETR
+ ffn_drop=0.0)), # 0.1 for DeformDETR
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128,
+ normalize=True,
+ offset=0.0, # -0.5 for DeformDETR
+ temperature=20), # 10000 for DeformDETR
+ bbox_head=dict(
+ type='DINOHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0), # 2.0 in DeformDETR
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ dn_cfg=dict( # TODO: Move to model.train_cfg ?
+ label_noise_scale=0.5,
+ box_noise_scale=1.0, # 0.4 for DN-DETR
+ group_cfg=dict(dynamic=True, num_groups=None,
+ num_dn_queries=100)), # TODO: half num_dn_queries
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='FocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=300)) # 100 for DeformDETR
+
+# train_pipeline, NOTE the img_scale and the Pad's size_divisor is different
+# from the default setting in mmdet.
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False), pipeline=train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW',
+ lr=0.0001, # 0.0002 for DeformDETR
+ weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(custom_keys={'backbone': dict(lr_mult=0.1)})
+) # custom_keys contains sampling_offsets and reference_points in DeformDETR # noqa
+
+# learning policy
+max_epochs = 12
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-24e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-24e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8534ac6a7ccc7f3f8c081275b3567a0a0792b7a5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-24e_coco.py
@@ -0,0 +1,13 @@
+_base_ = './dino-4scale_r50_8xb2-12e_coco.py'
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-36e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-36e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1c2cf4602d358dfed5b737f8a74843c89a54702d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_8xb2-36e_coco.py
@@ -0,0 +1,13 @@
+_base_ = './dino-4scale_r50_8xb2-12e_coco.py'
+max_epochs = 36
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[30],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_improved_8xb2-12e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_improved_8xb2-12e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6a4a82bacc1f1e990d4720db81cae0af5c012557
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-4scale_r50_improved_8xb2-12e_coco.py
@@ -0,0 +1,18 @@
+_base_ = ['dino-4scale_r50_8xb2-12e_coco.py']
+
+# from deformable detr hyper
+model = dict(
+ backbone=dict(frozen_stages=-1),
+ bbox_head=dict(loss_cls=dict(loss_weight=2.0)),
+ positional_encoding=dict(offset=-0.5, temperature=10000),
+ dn_cfg=dict(group_cfg=dict(num_dn_queries=300)))
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.0002),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'backbone': dict(lr_mult=0.1),
+ 'sampling_offsets': dict(lr_mult=0.1),
+ 'reference_points': dict(lr_mult=0.1)
+ }))
diff --git a/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-12e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-12e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d39f22f50926a11137d143976fe4033ec3a8640
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-12e_coco.py
@@ -0,0 +1,30 @@
+_base_ = './dino-4scale_r50_8xb2-12e_coco.py'
+
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth' # noqa
+num_levels = 5
+model = dict(
+ num_feature_levels=num_levels,
+ backbone=dict(
+ _delete_=True,
+ type='SwinTransformer',
+ pretrain_img_size=384,
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ # Please only add indices that would be used
+ # in FPN, otherwise some parameter will not be used
+ with_cp=True,
+ convert_weights=True,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ neck=dict(in_channels=[192, 384, 768, 1536], num_outs=num_levels),
+ encoder=dict(layer_cfg=dict(self_attn_cfg=dict(num_levels=num_levels))),
+ decoder=dict(layer_cfg=dict(cross_attn_cfg=dict(num_levels=num_levels))))
diff --git a/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-36e_coco.py b/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-36e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d55a38e61d411892c6de819cf46247ba4d41d427
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/dino-5scale_swin-l_8xb2-36e_coco.py
@@ -0,0 +1,13 @@
+_base_ = './dino-5scale_swin-l_8xb2-12e_coco.py'
+max_epochs = 36
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[27, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/dino/metafile.yml b/grounding-dino/mmdetection/configs/dino/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f276a04ef557b70443083ac70b6a16671e7fa6e1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dino/metafile.yml
@@ -0,0 +1,85 @@
+Collections:
+ - Name: DINO
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Multi Scale Train
+ - Gradient Clip
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - ResNet
+ - Transformer
+ Paper:
+ URL: https://arxiv.org/abs/2203.03605
+ Title: 'DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection'
+ README: configs/dino/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/f4112c9e5611468ffbd57cfba548fd1289264b52/mmdet/models/detectors/dino.py#L17
+ Version: v3.0.0rc6
+
+Models:
+ - Name: dino-4scale_r50_8xb2-12e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-4scale_r50_8xb2-12e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.0
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_8xb2-12e_coco/dino-4scale_r50_8xb2-12e_coco_20221202_182705-55b2bba2.pth
+
+ - Name: dino-4scale_r50_8xb2-24e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-4scale_r50_8xb2-24e_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+
+ - Name: dino-4scale_r50_8xb2-36e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-4scale_r50_8xb2-36e_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+
+ - Name: dino-5scale_swin-l_8xb2-12e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-5scale_swin-l_8xb2-12e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 57.2
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/dino/dino-5scale_swin-l_8xb2-12e_coco/dino-5scale_swin-l_8xb2-12e_coco_20230228_072924-a654145f.pth
+
+ - Name: dino-5scale_swin-l_8xb2-36e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-5scale_swin-l_8xb2-36e_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 58.4
+ Weights: https://github.com/RistoranteRist/mmlab-weights/releases/download/dino-swinl/dino-5scale_swin-l_8xb2-36e_coco-5486e051.pth
+ - Name: dino-4scale_r50_improved_8xb2-12e_coco
+ In Collection: DINO
+ Config: configs/dino/dino-4scale_r50_improved_8xb2-12e_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/dino/dino-4scale_r50_improved_8xb2-12e_coco/dino-4scale_r50_improved_8xb2-12e_coco_20230818_162607-6f47a913.pth
diff --git a/grounding-dino/mmdetection/configs/double_heads/README.md b/grounding-dino/mmdetection/configs/double_heads/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1b97dbc188df1557814f40e792940ab45a845781
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/double_heads/README.md
@@ -0,0 +1,32 @@
+# Double Heads
+
+> [Rethinking Classification and Localization for Object Detection](https://arxiv.org/abs/1904.06493)
+
+
+
+## Abstract
+
+Two head structures (i.e. fully connected head and convolution head) have been widely used in R-CNN based detectors for classification and localization tasks. However, there is a lack of understanding of how does these two head structures work for these two tasks. To address this issue, we perform a thorough analysis and find an interesting fact that the two head structures have opposite preferences towards the two tasks. Specifically, the fully connected head (fc-head) is more suitable for the classification task, while the convolution head (conv-head) is more suitable for the localization task. Furthermore, we examine the output feature maps of both heads and find that fc-head has more spatial sensitivity than conv-head. Thus, fc-head has more capability to distinguish a complete object from part of an object, but is not robust to regress the whole object. Based upon these findings, we propose a Double-Head method, which has a fully connected head focusing on classification and a convolution head for bounding box regression. Without bells and whistles, our method gains +3.5 and +2.8 AP on MS COCO dataset from Feature Pyramid Network (FPN) baselines with ResNet-50 and ResNet-101 backbones, respectively.
+
+
+
+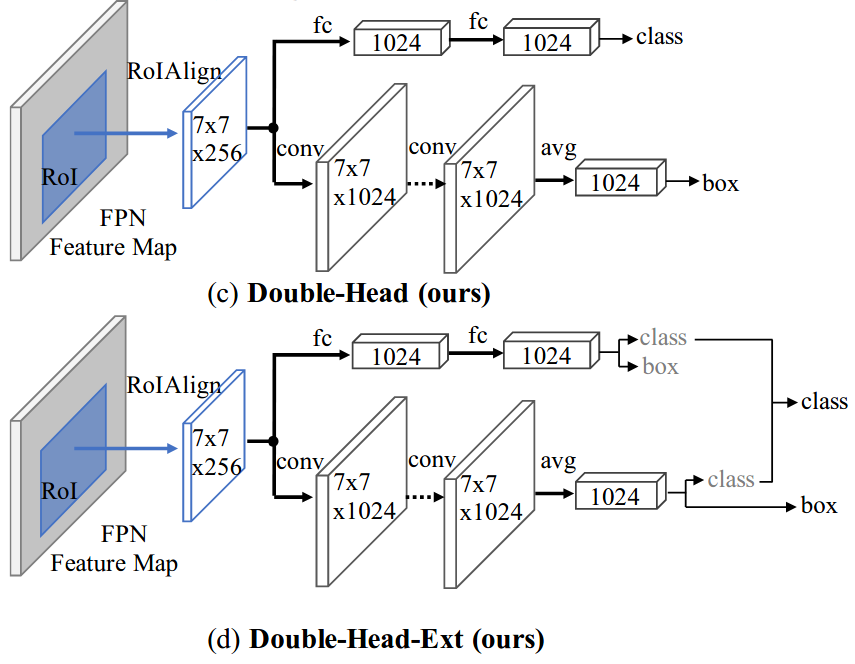 +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :-----: | :-----: | :------: | :------------: | :----: | :-------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 6.8 | 9.5 | 40.0 | [config](./dh-faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/double_heads/dh_faster_rcnn_r50_fpn_1x_coco/dh_faster_rcnn_r50_fpn_1x_coco_20200130-586b67df.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/double_heads/dh_faster_rcnn_r50_fpn_1x_coco/dh_faster_rcnn_r50_fpn_1x_coco_20200130_220238.log.json) |
+
+## Citation
+
+```latex
+@article{wu2019rethinking,
+ title={Rethinking Classification and Localization for Object Detection},
+ author={Yue Wu and Yinpeng Chen and Lu Yuan and Zicheng Liu and Lijuan Wang and Hongzhi Li and Yun Fu},
+ year={2019},
+ eprint={1904.06493},
+ archivePrefix={arXiv},
+ primaryClass={cs.CV}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/double_heads/dh-faster-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/double_heads/dh-faster-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b9b6e69a12d978a55fbba049fc2b1c5229c1fc5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/double_heads/dh-faster-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,23 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ type='DoubleHeadRoIHead',
+ reg_roi_scale_factor=1.3,
+ bbox_head=dict(
+ _delete_=True,
+ type='DoubleConvFCBBoxHead',
+ num_convs=4,
+ num_fcs=2,
+ in_channels=256,
+ conv_out_channels=1024,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=2.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=2.0))))
diff --git a/grounding-dino/mmdetection/configs/double_heads/metafile.yml b/grounding-dino/mmdetection/configs/double_heads/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..bb14e7968e259bb6dae1bbd6dad5e1c4e862f228
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/double_heads/metafile.yml
@@ -0,0 +1,41 @@
+Collections:
+ - Name: Rethinking Classification and Localization for Object Detection
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - RPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/pdf/1904.06493
+ Title: 'Rethinking Classification and Localization for Object Detection'
+ README: configs/double_heads/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/roi_heads/double_roi_head.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: dh-faster-rcnn_r50_fpn_1x_coco
+ In Collection: Rethinking Classification and Localization for Object Detection
+ Config: configs/double_heads/dh-faster-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.8
+ inference time (ms/im):
+ - value: 105.26
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/double_heads/dh_faster_rcnn_r50_fpn_1x_coco/dh_faster_rcnn_r50_fpn_1x_coco_20200130-586b67df.pth
diff --git a/grounding-dino/mmdetection/configs/dsdl/README.md b/grounding-dino/mmdetection/configs/dsdl/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..f38c3b65ac67ee623eb909acbd1dc8ad3eafa0af
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/README.md
@@ -0,0 +1,63 @@
+# DSDL: Standard Description Language for DataSet
+
+
+
+## 1. Abstract
+
+Data is the cornerstone of artificial intelligence. The efficiency of data acquisition, exchange, and application directly impacts the advances in technologies and applications. Over the long history of AI, a vast quantity of data sets have been developed and distributed. However, these datasets are defined in very different forms, which incurs significant overhead when it comes to exchange, integration, and utilization -- it is often the case that one needs to develop a new customized tool or script in order to incorporate a new dataset into a workflow.
+
+To overcome such difficulties, we develop **Data Set Description Language (DSDL)**. More details please visit our [official documents](https://opendatalab.github.io/dsdl-docs/getting_started/overview/), dsdl datasets can be downloaded from our platform [OpenDataLab](https://opendatalab.com/).
+
+## 2. Steps
+
+- install dsdl:
+
+ install by pip:
+
+ ```
+ pip install dsdl
+ ```
+
+ install by source code:
+
+ ```
+ git clone https://github.com/opendatalab/dsdl-sdk.git -b schema-dsdl
+ cd dsdl-sdk
+ python setup.py install
+ ```
+
+- install mmdet and pytorch:
+ please refer this [installation documents](https://mmdetection.readthedocs.io/en/latest/get_started.html).
+
+- train:
+
+ - using single gpu:
+
+ ```
+ python tools/train.py {config_file}
+ ```
+
+ - using slurm:
+
+ ```
+ ./tools/slurm_train.sh {partition} {job_name} {config_file} {work_dir} {gpu_nums}
+ ```
+
+## 3. Test Results
+
+- detection task:
+
+ | Datasets | Model | box AP | Config |
+ | :--------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | :----: | :-------------------------: |
+ | VOC07+12 | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/faster_rcnn_r50_fpn_1x_voc0712/faster_rcnn_r50_fpn_1x_voc0712_20220320_192712-54bef0f3.pth) | 80.3\* | [config](./voc0712.py) |
+ | COCO | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth) | 37.4 | [config](./coco.py) |
+ | Objects365 | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v2/faster_rcnn_r50_fpn_16x4_1x_obj365v2_20221220_175040-5910b015.pth) | 19.8 | [config](./objects365v2.py) |
+ | OpenImages | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_20220306_202424-98c630e5.pth) | 59.9\* | [config](./openimagesv6.py) |
+
+ \*: box AP in voc metric and openimages metric, actually means AP_50.
+
+- instance segmentation task:
+
+ | Datasets | Model | box AP | mask AP | Config |
+ | :------: | :------------------------------------------------------------------------------------------------------------------------------------------: | :----: | :-----: | :--------------------------: |
+ | COCO | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth) | 38.1 | 34.7 | [config](./coco_instance.py) |
diff --git a/grounding-dino/mmdetection/configs/dsdl/coco.py b/grounding-dino/mmdetection/configs/dsdl/coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3c9e895e53c1588028cf6def2fe79d49fd98d6e1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/coco.py
@@ -0,0 +1,33 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py',
+ '../_base_/datasets/dsdl.py'
+]
+
+# dsdl dataset settings
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+data_root = 'data/COCO2017'
+img_prefix = 'original'
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-val/val.yaml'
+specific_key_path = dict(ignore_flag='./annotations/*/iscrowd')
+
+train_dataloader = dict(
+ dataset=dict(
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ ))
+
+val_dataloader = dict(
+ dataset=dict(
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ ))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/dsdl/coco_instance.py b/grounding-dino/mmdetection/configs/dsdl/coco_instance.py
new file mode 100644
index 0000000000000000000000000000000000000000..e34f93c97f55f5eeef55f9de73f1a8389f8980c6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/coco_instance.py
@@ -0,0 +1,62 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py',
+ '../_base_/datasets/dsdl.py'
+]
+
+# dsdl dataset settings.
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+data_root = 'data/COCO2017'
+img_prefix = 'original'
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-val/val.yaml'
+specific_key_path = dict(ignore_flag='./annotations/*/iscrowd')
+
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances'))
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ with_polygon=True,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline,
+ ))
+
+val_dataloader = dict(
+ dataset=dict(
+ with_polygon=True,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ pipeline=test_pipeline,
+ ))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric', metric=['bbox', 'segm'], format_only=False)
+
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/dsdl/objects365v2.py b/grounding-dino/mmdetection/configs/dsdl/objects365v2.py
new file mode 100644
index 0000000000000000000000000000000000000000..d25a2323027c22eaf9777f6e62e4992880b29d2c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/objects365v2.py
@@ -0,0 +1,54 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py',
+ '../_base_/datasets/dsdl.py'
+]
+
+model = dict(roi_head=dict(bbox_head=dict(num_classes=365)))
+
+# dsdl dataset settings
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+data_root = 'data/Objects365'
+img_prefix = 'original'
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-val/val.yaml'
+specific_key_path = dict(ignore_flag='./annotations/*/iscrowd')
+
+train_dataloader = dict(
+ dataset=dict(
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ ))
+
+val_dataloader = dict(
+ dataset=dict(
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ test_mode=True,
+ ))
+test_dataloader = val_dataloader
+
+default_hooks = dict(logger=dict(type='LoggerHook', interval=1000), )
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=3, val_interval=1)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[1, 2],
+ gamma=0.1)
+]
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/dsdl/openimagesv6.py b/grounding-dino/mmdetection/configs/dsdl/openimagesv6.py
new file mode 100644
index 0000000000000000000000000000000000000000..a65f942a0d4f8cfdaa3cfb712276d6de34d62a84
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/openimagesv6.py
@@ -0,0 +1,94 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py',
+ '../_base_/default_runtime.py',
+]
+
+model = dict(roi_head=dict(bbox_head=dict(num_classes=601)))
+
+# dsdl dataset settings
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+dataset_type = 'DSDLDetDataset'
+data_root = 'data/OpenImages'
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-val/val.yaml'
+specific_key_path = dict(
+ image_level_labels='./image_labels/*/label',
+ Label='./objects/*/label',
+ is_group_of='./objects/*/isgroupof',
+)
+
+backend_args = dict(
+ backend='petrel',
+ path_mapping=dict({'data/': 's3://open_dataset_original/'}))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1024, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1024, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances', 'image_level_labels'))
+]
+
+train_dataloader = dict(
+ sampler=dict(type='ClassAwareSampler', num_sample_class=1),
+ dataset=dict(
+ type=dataset_type,
+ with_imagelevel_label=True,
+ with_hierarchy=True,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=train_ann,
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline))
+
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ with_imagelevel_label=True,
+ with_hierarchy=True,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=val_ann,
+ test_mode=True,
+ pipeline=test_pipeline))
+
+test_dataloader = val_dataloader
+
+default_hooks = dict(logger=dict(type='LoggerHook', interval=1000), )
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=3, val_interval=1)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[1, 2],
+ gamma=0.1)
+]
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+val_evaluator = dict(
+ type='OpenImagesMetric',
+ iou_thrs=0.5,
+ ioa_thrs=0.5,
+ use_group_of=True,
+ get_supercategory=True)
+
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/dsdl/voc07.py b/grounding-dino/mmdetection/configs/dsdl/voc07.py
new file mode 100644
index 0000000000000000000000000000000000000000..b7b864714e4987ca9d31eda5fee746e741b7aa10
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/voc07.py
@@ -0,0 +1,94 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/default_runtime.py'
+]
+
+# model setting
+model = dict(roi_head=dict(bbox_head=dict(num_classes=20)))
+
+# dsdl dataset settings
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+dataset_type = 'DSDLDetDataset'
+data_root = 'data/VOC07-det'
+img_prefix = 'original'
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-test/test.yaml'
+
+specific_key_path = dict(ignore_flag='./objects/*/difficult')
+
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances'))
+]
+train_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline))
+
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# Pascal VOC2007 uses `11points` as default evaluate mode, while PASCAL
+# VOC2012 defaults to use 'area'.
+val_evaluator = dict(type='VOCMetric', metric='mAP', eval_mode='11points')
+# val_evaluator = dict(type='CocoMetric', metric='bbox')
+test_evaluator = val_evaluator
+
+# training schedule, voc dataset is repeated 3 times, in
+# `_base_/datasets/voc0712.py`, so the actual epoch = 4 * 3 = 12
+max_epochs = 12
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=3)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[9],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/dsdl/voc0712.py b/grounding-dino/mmdetection/configs/dsdl/voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..9ec1bb8f98e56d0402c9a80934c3b77bd7919fa4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dsdl/voc0712.py
@@ -0,0 +1,132 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py',
+ '../_base_/default_runtime.py',
+ # '../_base_/datasets/dsdl.py'
+]
+
+# model setting
+model = dict(roi_head=dict(bbox_head=dict(num_classes=20)))
+
+# dsdl dataset settings
+
+# please visit our platform [OpenDataLab](https://opendatalab.com/)
+# to downloaded dsdl dataset.
+dataset_type = 'DSDLDetDataset'
+data_root_07 = 'data/VOC07-det'
+data_root_12 = 'data/VOC12-det'
+img_prefix = 'original'
+
+train_ann = 'dsdl/set-train/train.yaml'
+val_ann = 'dsdl/set-val/val.yaml'
+test_ann = 'dsdl/set-test/test.yaml'
+
+backend_args = None
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances'))
+]
+
+specific_key_path = dict(ignore_flag='./objects/*/difficult', )
+
+train_dataloader = dict(
+ dataset=dict(
+ type='RepeatDataset',
+ times=3,
+ dataset=dict(
+ type='ConcatDataset',
+ datasets=[
+ dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root_07,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline),
+ dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root_07,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline),
+ dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root_12,
+ ann_file=train_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline),
+ dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root_12,
+ ann_file=val_ann,
+ data_prefix=dict(img_path=img_prefix),
+ filter_cfg=dict(
+ filter_empty_gt=True, min_size=32, bbox_min_size=32),
+ pipeline=train_pipeline),
+ ])))
+
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ specific_key_path=specific_key_path,
+ data_root=data_root_07,
+ ann_file=test_ann,
+ test_mode=True,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(type='CocoMetric', metric='bbox')
+# val_evaluator = dict(type='VOCMetric', metric='mAP', eval_mode='11points')
+test_evaluator = val_evaluator
+
+# training schedule, voc dataset is repeated 3 times, in
+# `_base_/datasets/voc0712.py`, so the actual epoch = 4 * 3 = 12
+max_epochs = 4
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[3],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/dyhead/README.md b/grounding-dino/mmdetection/configs/dyhead/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..decd48051f0b10ef3f9e6de8ad7476e59fb89511
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dyhead/README.md
@@ -0,0 +1,52 @@
+# DyHead
+
+> [Dynamic Head: Unifying Object Detection Heads with Attentions](https://arxiv.org/abs/2106.08322)
+
+
+
+## Abstract
+
+The complex nature of combining localization and classification in object detection has resulted in the flourished development of methods. Previous works tried to improve the performance in various object detection heads but failed to present a unified view. In this paper, we present a novel dynamic head framework to unify object detection heads with attentions. By coherently combining multiple self-attention mechanisms between feature levels for scale-awareness, among spatial locations for spatial-awareness, and within output channels for task-awareness, the proposed approach significantly improves the representation ability of object detection heads without any computational overhead. Further experiments demonstrate that the effectiveness and efficiency of the proposed dynamic head on the COCO benchmark. With a standard ResNeXt-101-DCN backbone, we largely improve the performance over popular object detectors and achieve a new state-of-the-art at 54.0 AP. Furthermore, with latest transformer backbone and extra data, we can push current best COCO result to a new record at 60.6 AP.
+
+
+
+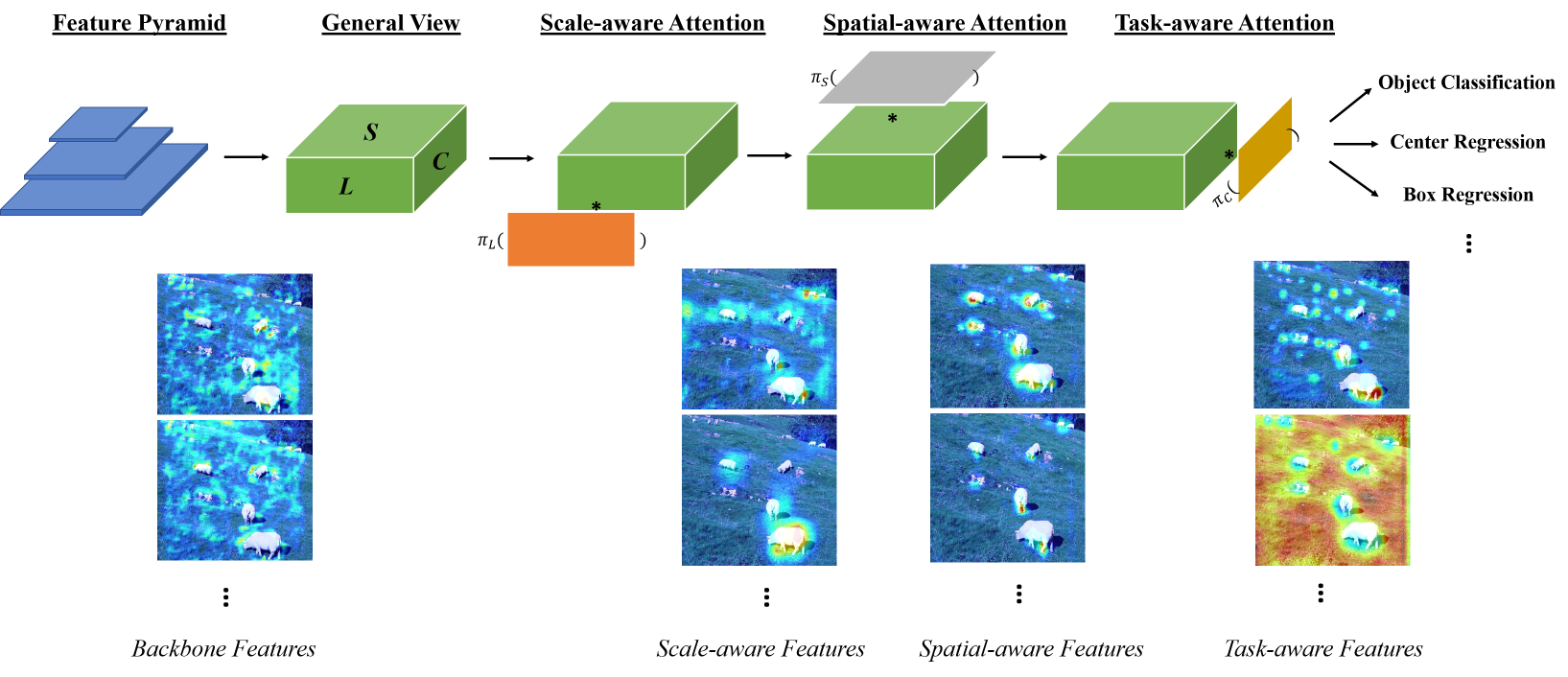 +
+
+
+## Results and Models
+
+| Method | Backbone | Style | Setting | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----: | :------: | :-----: | :----------: | :-----: | :------: | :------------: | :----: | :----------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| ATSS | R-50 | caffe | reproduction | 1x | 5.4 | 13.2 | 42.5 | [config](./atss_r50-caffe_fpn_dyhead_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_for_reproduction_1x_coco/atss_r50_fpn_dyhead_for_reproduction_4x4_1x_coco_20220107_213939-162888e6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_for_reproduction_1x_coco/atss_r50_fpn_dyhead_for_reproduction_4x4_1x_coco_20220107_213939.log.json) |
+| ATSS | R-50 | pytorch | simple | 1x | 4.9 | 13.7 | 43.3 | [config](./atss_r50_fpn_dyhead_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_4x4_1x_coco/atss_r50_fpn_dyhead_4x4_1x_coco_20211219_023314-eaa620c6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_4x4_1x_coco/atss_r50_fpn_dyhead_4x4_1x_coco_20211219_023314.log.json) |
+
+- We trained the above models with 4 GPUs and 4 `samples_per_gpu`.
+- The `reproduction` setting aims to reproduce the official implementation based on Detectron2.
+- The `simple` setting serves as a minimum example to use DyHead in MMDetection. Specifically,
+ - it adds `DyHead` to `neck` after `FPN`
+ - it sets `stacked_convs=0` to `bbox_head`
+- The `simple` setting achieves higher AP than the original implementation.
+ We have not conduct ablation study between the two settings.
+ `dict(type='Pad', size_divisor=128)` may further improve AP by prefer spatial alignment across pyramid levels, although large padding reduces efficiency.
+
+We also trained the model with Swin-L backbone. Results are as below.
+
+| Method | Backbone | Style | Setting | Lr schd | mstrain | box AP | Config | Download |
+| :----: | :------: | :---: | :----------: | :-----: | :------: | :----: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| ATSS | Swin-L | caffe | reproduction | 2x | 480~1200 | 56.2 | [config](./atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco_20220509_100315-bc5b6516.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco_20220509_100315.log.json) |
+
+## Relation to Other Methods
+
+- DyHead can be regarded as an improved [SEPC](https://arxiv.org/abs/2005.03101) with [DyReLU modules](https://arxiv.org/abs/2003.10027) and simplified [SE blocks](https://arxiv.org/abs/1709.01507).
+- Xiyang Dai et al., the author team of DyHead, adopt it for [Dynamic DETR](https://openaccess.thecvf.com/content/ICCV2021/html/Dai_Dynamic_DETR_End-to-End_Object_Detection_With_Dynamic_Attention_ICCV_2021_paper.html).
+ The description of Dynamic Encoder in Sec. 3.2 will help you understand DyHead.
+
+## Citation
+
+```latex
+@inproceedings{DyHead_CVPR2021,
+ author = {Dai, Xiyang and Chen, Yinpeng and Xiao, Bin and Chen, Dongdong and Liu, Mengchen and Yuan, Lu and Zhang, Lei},
+ title = {Dynamic Head: Unifying Object Detection Heads With Attentions},
+ booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
+ year = {2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/dyhead/atss_r50-caffe_fpn_dyhead_1x_coco.py b/grounding-dino/mmdetection/configs/dyhead/atss_r50-caffe_fpn_dyhead_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8716f1226cb0b37435d0318d62599a74e6126f19
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dyhead/atss_r50-caffe_fpn_dyhead_1x_coco.py
@@ -0,0 +1,103 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='ATSS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=128),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ dict(
+ type='DyHead',
+ in_channels=256,
+ out_channels=256,
+ num_blocks=6,
+ # disable zero_init_offset to follow official implementation
+ zero_init_offset=False)
+ ],
+ bbox_head=dict(
+ type='ATSSHead',
+ num_classes=80,
+ in_channels=256,
+ pred_kernel_size=1, # follow DyHead official implementation
+ stacked_convs=0,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128],
+ center_offset=0.5), # follow DyHead official implementation
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(lr=0.01))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True, backend='pillow'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True, backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/dyhead/atss_r50_fpn_dyhead_1x_coco.py b/grounding-dino/mmdetection/configs/dyhead/atss_r50_fpn_dyhead_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..89e89b98ca437bb13fe5d01acc05cfdcd04e8fa0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dyhead/atss_r50_fpn_dyhead_1x_coco.py
@@ -0,0 +1,72 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='ATSS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ dict(type='DyHead', in_channels=256, out_channels=256, num_blocks=6)
+ ],
+ bbox_head=dict(
+ type='ATSSHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=0,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/dyhead/atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco.py b/grounding-dino/mmdetection/configs/dyhead/atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f537b9dc9b17aa50f0044b874585fe1e0ba15216
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dyhead/atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco.py
@@ -0,0 +1,140 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth' # noqa
+model = dict(
+ type='ATSS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=128),
+ backbone=dict(
+ type='SwinTransformer',
+ pretrain_img_size=384,
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(1, 2, 3),
+ # Please only add indices that would be used
+ # in FPN, otherwise some parameter will not be used
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[384, 768, 1536],
+ out_channels=256,
+ start_level=0,
+ add_extra_convs='on_output',
+ num_outs=5),
+ dict(
+ type='DyHead',
+ in_channels=256,
+ out_channels=256,
+ num_blocks=6,
+ # disable zero_init_offset to follow official implementation
+ zero_init_offset=False)
+ ],
+ bbox_head=dict(
+ type='ATSSHead',
+ num_classes=80,
+ in_channels=256,
+ pred_kernel_size=1, # follow DyHead official implementation
+ stacked_convs=0,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128],
+ center_offset=0.5), # follow DyHead official implementation
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=[(2000, 480), (2000, 1200)],
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(2000, 1200), keep_ratio=True, backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ dataset=dict(
+ _delete_=True,
+ type='RepeatDataset',
+ times=2,
+ dataset=dict(
+ type={{_base_.dataset_type}},
+ data_root={{_base_.data_root}},
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args={{_base_.backend_args}})))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# optimizer
+optim_wrapper = dict(
+ _delete_=True,
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW', lr=0.00005, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'relative_position_bias_table': dict(decay_mult=0.),
+ 'norm': dict(decay_mult=0.)
+ }),
+ clip_grad=None)
diff --git a/grounding-dino/mmdetection/configs/dyhead/metafile.yml b/grounding-dino/mmdetection/configs/dyhead/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..28b5a5821c81cea3213494c712910f904ae117f2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dyhead/metafile.yml
@@ -0,0 +1,76 @@
+Collections:
+ - Name: DyHead
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 4x T4 GPUs
+ Architecture:
+ - ATSS
+ - DyHead
+ - FPN
+ - ResNet
+ - Deformable Convolution
+ - Pyramid Convolution
+ Paper:
+ URL: https://arxiv.org/abs/2106.08322
+ Title: 'Dynamic Head: Unifying Object Detection Heads with Attentions'
+ README: configs/dyhead/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/mmdet/models/necks/dyhead.py#L130
+ Version: v2.22.0
+
+Models:
+ - Name: atss_r50-caffe_fpn_dyhead_1x_coco
+ In Collection: DyHead
+ Config: configs/dyhead/atss_r50-caffe_fpn_dyhead_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.4
+ inference time (ms/im):
+ - value: 75.7
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_for_reproduction_1x_coco/atss_r50_fpn_dyhead_for_reproduction_4x4_1x_coco_20220107_213939-162888e6.pth
+
+ - Name: atss_r50_fpn_dyhead_1x_coco
+ In Collection: DyHead
+ Config: configs/dyhead/atss_r50_fpn_dyhead_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.9
+ inference time (ms/im):
+ - value: 73.1
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_r50_fpn_dyhead_4x4_1x_coco/atss_r50_fpn_dyhead_4x4_1x_coco_20211219_023314-eaa620c6.pth
+
+ - Name: atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco
+ In Collection: DyHead
+ Config: configs/dyhead/atss_swin-l-p4-w12_fpn_dyhead_ms-2x_coco.py
+ Metadata:
+ Training Memory (GB): 58.4
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 56.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/dyhead/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco/atss_swin-l-p4-w12_fpn_dyhead_mstrain_2x_coco_20220509_100315-bc5b6516.pth
diff --git a/grounding-dino/mmdetection/configs/dynamic_rcnn/README.md b/grounding-dino/mmdetection/configs/dynamic_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..b5e803a2f27f07a1e49abfc9195965e33f36b73a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dynamic_rcnn/README.md
@@ -0,0 +1,30 @@
+# Dynamic R-CNN
+
+> [Dynamic R-CNN: Towards High Quality Object Detection via Dynamic Training](https://arxiv.org/abs/2004.06002)
+
+
+
+## Abstract
+
+Although two-stage object detectors have continuously advanced the state-of-the-art performance in recent years, the training process itself is far from crystal. In this work, we first point out the inconsistency problem between the fixed network settings and the dynamic training procedure, which greatly affects the performance. For example, the fixed label assignment strategy and regression loss function cannot fit the distribution change of proposals and thus are harmful to training high quality detectors. Consequently, we propose Dynamic R-CNN to adjust the label assignment criteria (IoU threshold) and the shape of regression loss function (parameters of SmoothL1 Loss) automatically based on the statistics of proposals during training. This dynamic design makes better use of the training samples and pushes the detector to fit more high quality samples. Specifically, our method improves upon ResNet-50-FPN baseline with 1.9% AP and 5.5% AP90 on the MS COCO dataset with no extra overhead.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | 1x | 3.8 | | 38.9 | [config](./dynamic-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/dynamic_rcnn/dynamic_rcnn_r50_fpn_1x/dynamic_rcnn_r50_fpn_1x-62a3f276.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/dynamic_rcnn/dynamic_rcnn_r50_fpn_1x/dynamic_rcnn_r50_fpn_1x_20200618_095048.log.json) |
+
+## Citation
+
+```latex
+@article{DynamicRCNN,
+ author = {Hongkai Zhang and Hong Chang and Bingpeng Ma and Naiyan Wang and Xilin Chen},
+ title = {Dynamic {R-CNN}: Towards High Quality Object Detection via Dynamic Training},
+ journal = {arXiv preprint arXiv:2004.06002},
+ year = {2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/dynamic_rcnn/dynamic-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/dynamic_rcnn/dynamic-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f64dfa0b9102d5f7b32793b9d21e19c67afdfc2a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dynamic_rcnn/dynamic-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,28 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ type='DynamicRoIHead',
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False,
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn_proposal=dict(nms=dict(iou_threshold=0.85)),
+ rcnn=dict(
+ dynamic_rcnn=dict(
+ iou_topk=75,
+ beta_topk=10,
+ update_iter_interval=100,
+ initial_iou=0.4,
+ initial_beta=1.0))),
+ test_cfg=dict(rpn=dict(nms=dict(iou_threshold=0.85))))
diff --git a/grounding-dino/mmdetection/configs/dynamic_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/dynamic_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..64ab3b0ce490a25e227b3bcd60442669608fda22
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/dynamic_rcnn/metafile.yml
@@ -0,0 +1,35 @@
+Collections:
+ - Name: Dynamic R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Dynamic R-CNN
+ - FPN
+ - RPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/pdf/2004.06002
+ Title: 'Dynamic R-CNN: Towards High Quality Object Detection via Dynamic Training'
+ README: configs/dynamic_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.2.0/mmdet/models/roi_heads/dynamic_roi_head.py#L11
+ Version: v2.2.0
+
+Models:
+ - Name: dynamic-rcnn_r50_fpn_1x_coco
+ In Collection: Dynamic R-CNN
+ Config: configs/dynamic_rcnn/dynamic-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/dynamic_rcnn/dynamic_rcnn_r50_fpn_1x/dynamic_rcnn_r50_fpn_1x-62a3f276.pth
diff --git a/grounding-dino/mmdetection/configs/efficientnet/README.md b/grounding-dino/mmdetection/configs/efficientnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..941944db4f3fdc887da5ddc9647b3d619138478b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/efficientnet/README.md
@@ -0,0 +1,30 @@
+# EfficientNet
+
+> [EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks](https://arxiv.org/abs/1905.11946v5)
+
+
+
+## Introduction
+
+Convolutional Neural Networks (ConvNets) are commonly developed at a fixed resource budget, and then scaled up for better accuracy if more resources are available. In this paper, we systematically study model scaling and identify that carefully balancing network depth, width, and resolution can lead to better performance. Based on this observation, we propose a new scaling method that uniformly scales all dimensions of depth/width/resolution using a simple yet highly effective compound coefficient. We demonstrate the effectiveness of this method on scaling up MobileNets and ResNet.
+
+To go even further, we use neural architecture search to design a new baseline network and scale it up to obtain a family of models, called EfficientNets, which achieve much better accuracy and efficiency than previous ConvNets. In particular, our EfficientNet-B7 achieves state-of-the-art 84.3% top-1 accuracy on ImageNet, while being 8.4x smaller and 6.1x faster on inference than the best existing ConvNet. Our EfficientNets also transfer well and achieve state-of-the-art accuracy on CIFAR-100 (91.7%), Flowers (98.8%), and 3 other transfer learning datasets, with an order of magnitude fewer parameters.
+
+## Results and Models
+
+### RetinaNet
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Efficientnet-b3 | pytorch | 1x | - | - | 40.5 | [config](./retinanet_effb3_fpn_8xb4-crop896-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/efficientnet/retinanet_effb3_fpn_crop896_8x4_1x_coco/retinanet_effb3_fpn_crop896_8x4_1x_coco_20220322_234806-615a0dda.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/efficientnet/retinanet_effb3_fpn_crop896_8x4_1x_coco/retinanet_effb3_fpn_crop896_8x4_1x_coco_20220322_234806.log.json) |
+
+## Citation
+
+```latex
+@article{tan2019efficientnet,
+ title={Efficientnet: Rethinking model scaling for convolutional neural networks},
+ author={Tan, Mingxing and Le, Quoc V},
+ journal={arXiv preprint arXiv:1905.11946},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/efficientnet/metafile.yml b/grounding-dino/mmdetection/configs/efficientnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6e220c8ad7cd0e25386d950c21616d4b92f8481e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/efficientnet/metafile.yml
@@ -0,0 +1,19 @@
+Models:
+ - Name: retinanet_effb3_fpn_8xb4-crop896-1x_coco
+ In Collection: RetinaNet
+ Config: configs/efficientnet/retinanet_effb3_fpn_8xb4-crop896-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/efficientnet/retinanet_effb3_fpn_crop896_8x4_1x_coco/retinanet_effb3_fpn_crop896_8x4_1x_coco_20220322_234806-615a0dda.pth
+ Paper:
+ URL: https://arxiv.org/abs/1905.11946v5
+ Title: 'EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks'
+ README: configs/efficientnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.23.0/mmdet/models/backbones/efficientnet.py#L159
+ Version: v2.23.0
diff --git a/grounding-dino/mmdetection/configs/efficientnet/retinanet_effb3_fpn_8xb4-crop896-1x_coco.py b/grounding-dino/mmdetection/configs/efficientnet/retinanet_effb3_fpn_8xb4-crop896-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2d0d9cefd0b565b2cce42117eb872ac9373ea4b9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/efficientnet/retinanet_effb3_fpn_8xb4-crop896-1x_coco.py
@@ -0,0 +1,94 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/schedules/schedule_1x.py',
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+
+image_size = (896, 896)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+norm_cfg = dict(type='BN', requires_grad=True)
+checkpoint = 'https://download.openmmlab.com/mmclassification/v0/efficientnet/efficientnet-b3_3rdparty_8xb32-aa_in1k_20220119-5b4887a0.pth' # noqa
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ batch_augments=batch_augments),
+ backbone=dict(
+ _delete_=True,
+ type='EfficientNet',
+ arch='b3',
+ drop_path_rate=0.2,
+ out_indices=(3, 4, 5),
+ frozen_stages=0,
+ norm_cfg=dict(
+ type='SyncBN', requires_grad=True, eps=1e-3, momentum=0.01),
+ norm_eval=False,
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone', checkpoint=checkpoint)),
+ neck=dict(
+ in_channels=[48, 136, 384],
+ start_level=0,
+ out_channels=256,
+ relu_before_extra_convs=True,
+ no_norm_on_lateral=True,
+ norm_cfg=norm_cfg),
+ bbox_head=dict(type='RetinaSepBNHead', num_ins=5, norm_cfg=norm_cfg),
+ # training and testing settings
+ train_cfg=dict(assigner=dict(neg_iou_thr=0.5)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=image_size,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=image_size),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=image_size, keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=4, num_workers=4, dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.04),
+ paramwise_cfg=dict(norm_decay_mult=0, bypass_duplicate=True))
+
+# learning policy
+max_epochs = 12
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+
+# cudnn_benchmark=True can accelerate fix-size training
+env_cfg = dict(cudnn_benchmark=True)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (4 samples per GPU)
+auto_scale_lr = dict(base_batch_size=32)
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/README.md b/grounding-dino/mmdetection/configs/empirical_attention/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..c0b4a68b6c35fefadc886c844d66d871eb90bef6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/README.md
@@ -0,0 +1,33 @@
+# Empirical Attention
+
+> [An Empirical Study of Spatial Attention Mechanisms in Deep Networks](https://arxiv.org/abs/1904.05873)
+
+
+
+## Abstract
+
+Attention mechanisms have become a popular component in deep neural networks, yet there has been little examination of how different influencing factors and methods for computing attention from these factors affect performance. Toward a better general understanding of attention mechanisms, we present an empirical study that ablates various spatial attention elements within a generalized attention formulation, encompassing the dominant Transformer attention as well as the prevalent deformable convolution and dynamic convolution modules. Conducted on a variety of applications, the study yields significant findings about spatial attention in deep networks, some of which run counter to conventional understanding. For example, we find that the query and key content comparison in Transformer attention is negligible for self-attention, but vital for encoder-decoder attention. A proper combination of deformable convolution with key content only saliency achieves the best accuracy-efficiency tradeoff in self-attention. Our results suggest that there exists much room for improvement in the design of attention mechanisms.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Attention Component | DCN | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :-----------------: | :-: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | 1111 | N | 1x | 8.0 | 13.8 | 40.0 | [config](./faster-rcnn_r50-attn1111_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_1x_coco/faster_rcnn_r50_fpn_attention_1111_1x_coco_20200130-403cccba.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_1x_coco/faster_rcnn_r50_fpn_attention_1111_1x_coco_20200130_210344.log.json) |
+| R-50 | 0010 | N | 1x | 4.2 | 18.4 | 39.1 | [config](./faster-rcnn_r50-attn0010_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_1x_coco/faster_rcnn_r50_fpn_attention_0010_1x_coco_20200130-7cb0c14d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_1x_coco/faster_rcnn_r50_fpn_attention_0010_1x_coco_20200130_210125.log.json) |
+| R-50 | 1111 | Y | 1x | 8.0 | 12.7 | 42.1 | [config](./faster-rcnn_r50-attn1111-dcn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco_20200130-8b2523a6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco_20200130_204442.log.json) |
+| R-50 | 0010 | Y | 1x | 4.2 | 17.1 | 42.0 | [config](./faster-rcnn_r50-attn0010-dcn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco_20200130-1a2e831d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco_20200130_210410.log.json) |
+
+## Citation
+
+```latex
+@article{zhu2019empirical,
+ title={An Empirical Study of Spatial Attention Mechanisms in Deep Networks},
+ author={Zhu, Xizhou and Cheng, Dazhi and Zhang, Zheng and Lin, Stephen and Dai, Jifeng},
+ journal={arXiv preprint arXiv:1904.05873},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010-dcn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010-dcn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e1ae17a7ee4d3516e6aca90697fa165f592cf51e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010-dcn_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ plugins=[
+ dict(
+ cfg=dict(
+ type='GeneralizedAttention',
+ spatial_range=-1,
+ num_heads=8,
+ attention_type='0010',
+ kv_stride=2),
+ stages=(False, False, True, True),
+ position='after_conv2')
+ ],
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)))
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7336d292eafe8c92407f831e712946a23e231db0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn0010_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(
+ type='GeneralizedAttention',
+ spatial_range=-1,
+ num_heads=8,
+ attention_type='0010',
+ kv_stride=2),
+ stages=(False, False, True, True),
+ position='after_conv2')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111-dcn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111-dcn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..980e23d4509a19fe438d5c8494e2905d940705b1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111-dcn_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ plugins=[
+ dict(
+ cfg=dict(
+ type='GeneralizedAttention',
+ spatial_range=-1,
+ num_heads=8,
+ attention_type='1111',
+ kv_stride=2),
+ stages=(False, False, True, True),
+ position='after_conv2')
+ ],
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)))
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..426bc09fd64c16b43b33a5c797265aa9ec2c0c15
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/faster-rcnn_r50-attn1111_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(
+ type='GeneralizedAttention',
+ spatial_range=-1,
+ num_heads=8,
+ attention_type='1111',
+ kv_stride=2),
+ stages=(False, False, True, True),
+ position='after_conv2')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/empirical_attention/metafile.yml b/grounding-dino/mmdetection/configs/empirical_attention/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b488da7d29fbd632da614895272cec2025b5eccc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/empirical_attention/metafile.yml
@@ -0,0 +1,103 @@
+Collections:
+ - Name: Empirical Attention
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Deformable Convolution
+ - FPN
+ - RPN
+ - ResNet
+ - RoIAlign
+ - Spatial Attention
+ Paper:
+ URL: https://arxiv.org/pdf/1904.05873
+ Title: 'An Empirical Study of Spatial Attention Mechanisms in Deep Networks'
+ README: configs/empirical_attention/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/ops/generalized_attention.py#L10
+ Version: v2.0.0
+
+Models:
+ - Name: faster-rcnn_r50_fpn_attention_1111_1x_coco
+ In Collection: Empirical Attention
+ Config: configs/empirical_attention/faster-rcnn_r50-attn1111_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.0
+ inference time (ms/im):
+ - value: 72.46
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_1x_coco/faster_rcnn_r50_fpn_attention_1111_1x_coco_20200130-403cccba.pth
+
+ - Name: faster-rcnn_r50_fpn_attention_0010_1x_coco
+ In Collection: Empirical Attention
+ Config: configs/empirical_attention/faster-rcnn_r50-attn0010_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.2
+ inference time (ms/im):
+ - value: 54.35
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_1x_coco/faster_rcnn_r50_fpn_attention_0010_1x_coco_20200130-7cb0c14d.pth
+
+ - Name: faster-rcnn_r50_fpn_attention_1111_dcn_1x_coco
+ In Collection: Empirical Attention
+ Config: configs/empirical_attention/faster-rcnn_r50-attn1111-dcn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.0
+ inference time (ms/im):
+ - value: 78.74
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco/faster_rcnn_r50_fpn_attention_1111_dcn_1x_coco_20200130-8b2523a6.pth
+
+ - Name: faster-rcnn_r50_fpn_attention_0010_dcn_1x_coco
+ In Collection: Empirical Attention
+ Config: configs/empirical_attention/faster-rcnn_r50-attn0010-dcn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.2
+ inference time (ms/im):
+ - value: 58.48
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/empirical_attention/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco/faster_rcnn_r50_fpn_attention_0010_dcn_1x_coco_20200130-1a2e831d.pth
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/README.md b/grounding-dino/mmdetection/configs/fast_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..0bdc9359c7c6e6100fa9f08397aa46e5c9999bac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/README.md
@@ -0,0 +1,121 @@
+# Fast R-CNN
+
+> [Fast R-CNN](https://arxiv.org/abs/1504.08083)
+
+
+
+## Abstract
+
+This paper proposes a Fast Region-based Convolutional Network method (Fast R-CNN) for object detection. Fast R-CNN builds on previous work to efficiently classify object proposals using deep convolutional networks. Compared to previous work, Fast R-CNN employs several innovations to improve training and testing speed while also increasing detection accuracy. Fast R-CNN trains the very deep VGG16 network 9x faster than R-CNN, is 213x faster at test-time, and achieves a higher mAP on PASCAL VOC 2012. Compared to SPPnet, Fast R-CNN trains VGG16 3x faster, tests 10x faster, and is more accurate.
+
+
+
+ +
+
+
+## Introduction
+
+Before training the Fast R-CNN, users should first train an [RPN](../rpn/README.md), and use the RPN to extract the region proposals.
+The region proposals can be obtained by setting `DumpProposals` pseudo metric. The dumped results is a `dict(file_name: pred_instance)`.
+The `pred_instance` is an `InstanceData` containing the sorted boxes and scores predicted by RPN. We provide example of dumping proposals in [RPN config](../rpn/rpn_r50_fpn_1x_coco.py).
+
+- First, it should be obtained the region proposals in both training and validation (or testing) set.
+ change the type of `test_evaluator` to `DumpProposals` in the RPN config to get the region proposals as below:
+
+ The config of get training image region proposals can be set as below:
+
+ ```python
+ # For training set
+ val_dataloader = dict(
+ dataset=dict(
+ ann_file='data/coco/annotations/instances_train2017.json',
+ data_prefix=dict(img='val2017/')))
+ val_dataloader = dict(
+ _delete_=True,
+ type='DumpProposals',
+ output_dir='data/coco/proposals/',
+ proposals_file='rpn_r50_fpn_1x_train2017.pkl')
+ test_dataloader = val_dataloader
+ test_evaluator = val_dataloader
+ ```
+
+ The config of get validation image region proposals can be set as below:
+
+ ```python
+ # For validation set
+ val_dataloader = dict(
+ _delete_=True,
+ type='DumpProposals',
+ output_dir='data/coco/proposals/',
+ proposals_file='rpn_r50_fpn_1x_val2017.pkl')
+ test_evaluator = val_dataloader
+ ```
+
+ Extract the region proposals command can be set as below:
+
+ ```bash
+ ./tools/dist_test.sh \
+ configs/rpn_r50_fpn_1x_coco.py \
+ checkpoints/rpn_r50_fpn_1x_coco_20200218-5525fa2e.pth \
+ 8
+ ```
+
+ Users can refer to [test tutorial](https://mmdetection.readthedocs.io/en/latest/user_guides/test.html) for more details.
+
+- Then, modify the path of `proposal_file` in the dataset and using `ProposalBroadcaster` to process both ground truth bounding boxes and region proposals in pipelines.
+ An example of Fast R-CNN important setting can be seen as below:
+
+ ```python
+ train_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ backend_args={{_base_.backend_args}}),
+ dict(type='LoadProposals', num_max_proposals=2000),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='ProposalBroadcaster',
+ transforms=[
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ ]),
+ dict(type='PackDetInputs')
+ ]
+ test_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ backend_args={{_base_.backend_args}}),
+ dict(type='LoadProposals', num_max_proposals=None),
+ dict(
+ type='ProposalBroadcaster',
+ transforms=[
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ ]),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+ ]
+ train_dataloader = dict(
+ dataset=dict(
+ proposal_file='proposals/rpn_r50_fpn_1x_train2017.pkl',
+ pipeline=train_pipeline))
+ val_dataloader = dict(
+ dataset=dict(
+ proposal_file='proposals/rpn_r50_fpn_1x_val2017.pkl',
+ pipeline=test_pipeline))
+ test_dataloader = val_dataloader
+ ```
+
+- Finally, users can start training the Fast R-CNN.
+
+## Results and Models
+
+## Citation
+
+```latex
+@inproceedings{girshick2015fast,
+ title={Fast r-cnn},
+ author={Girshick, Ross},
+ booktitle={Proceedings of the IEEE international conference on computer vision},
+ year={2015}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..02c70296fca04d59b2b87801fa7834c0dc3d30f0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './fast-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5af6b223c5bf66928a1d79ffba904d86006a3741
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './fast-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..73425cf1ac3be429c69f6cf6b482fee91a8e2782
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r101_fpn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './fast-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3110f9fdf590ea665c9d7b7e28a56613cd79b786
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './fast-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='caffe',
+ norm_eval=True,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..daefe2d2d287b865b925263a81c12a6e30c58c4d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,39 @@
+_base_ = [
+ '../_base_/models/fast-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadProposals', num_max_proposals=2000),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='ProposalBroadcaster',
+ transforms=[
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ ]),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadProposals', num_max_proposals=None),
+ dict(
+ type='ProposalBroadcaster',
+ transforms=[
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ ]),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ dataset=dict(
+ proposal_file='proposals/rpn_r50_fpn_1x_train2017.pkl',
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ dataset=dict(
+ proposal_file='proposals/rpn_r50_fpn_1x_val2017.pkl',
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d609a7c02d657e15316a4c5747983a4d9a10fc7c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fast_rcnn/fast-rcnn_r50_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './fast-rcnn_r50_fpn_1x_coco.py'
+
+train_cfg = dict(max_epochs=24)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/README.md b/grounding-dino/mmdetection/configs/faster_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..8bcdcf6d5120b65cc68c24b46e8d4d35447491fd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/README.md
@@ -0,0 +1,88 @@
+# Faster R-CNN
+
+> [Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks](https://arxiv.org/abs/1506.01497)
+
+
+
+## Abstract
+
+State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet and Fast R-CNN have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully convolutional network that simultaneously predicts object bounds and objectness scores at each position. The RPN is trained end-to-end to generate high-quality region proposals, which are used by Fast R-CNN for detection. We further merge RPN and Fast R-CNN into a single network by sharing their convolutional features---using the recently popular terminology of neural networks with 'attention' mechanisms, the RPN component tells the unified network where to look. For the very deep VGG-16 model, our detection system has a frame rate of 5fps (including all steps) on a GPU, while achieving state-of-the-art object detection accuracy on PASCAL VOC 2007, 2012, and MS COCO datasets with only 300 proposals per image. In ILSVRC and COCO 2015 competitions, Faster R-CNN and RPN are the foundations of the 1st-place winning entries in several tracks.
+
+
+
+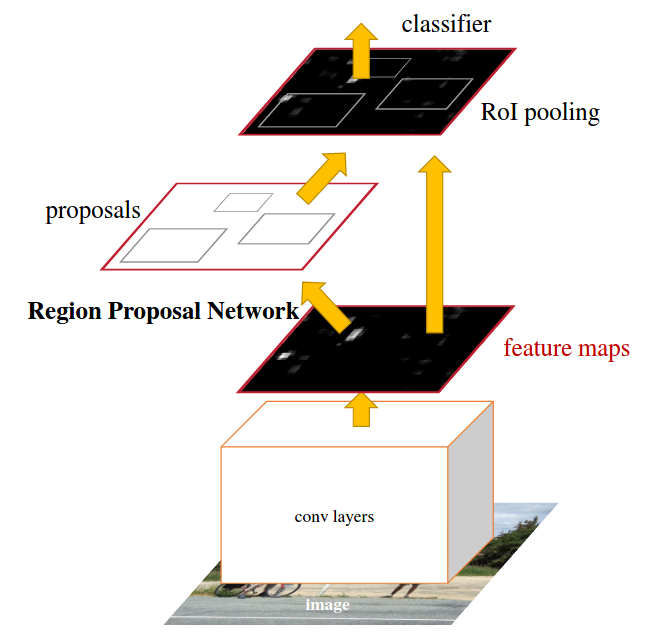 +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-C4 | caffe | 1x | - | - | 35.6 | [config](./faster-rcnn_r50-caffe_c4-1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50-caffe-c4_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_c4_1x_coco/faster_rcnn_r50_caffe_c4_1x_coco_20220316_150152.log.json) |
+| R-50-DC5 | caffe | 1x | - | - | 37.2 | [config](./faster-rcnn_r50-caffe-dc5_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50-caffe-dc5_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_1x_coco/faster_rcnn_r50_caffe_dc5_1x_coco_20201030_151909.log.json) |
+| R-50-FPN | caffe | 1x | 3.8 | | 37.8 | [config](./faster-rcnn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50-caffe_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_1x_coco/faster_rcnn_r50_caffe_fpn_1x_coco_20200504_180032.log.json) |
+| R-50-FPN | pytorch | 1x | 4.0 | 21.4 | 37.4 | [config](./faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130_204655.log.json) |
+| R-50-FPN (FP16) | pytorch | 1x | 3.4 | 28.8 | 37.5 | [config](./faster-rcnn_r50_fpn_amp-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fp16/faster_rcnn_r50_fpn_fp16_1x_coco/faster_rcnn_r50_fpn_fp16_1x_coco_20200204-d4dc1471.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fp16/faster_rcnn_r50_fpn_fp16_1x_coco/faster_rcnn_r50_fpn_fp16_1x_coco_20200204_143530.log.json) |
+| R-50-FPN | pytorch | 2x | - | - | 38.4 | [config](./faster-rcnn_r50_fpn_2x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50_fpn_2x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_2x_coco/faster_rcnn_r50_fpn_2x_coco_20200504_210434.log.json) |
+| R-101-FPN | caffe | 1x | 5.7 | | 39.8 | [config](./faster-rcnn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r101-caffe_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_caffe_fpn_1x_coco/faster_rcnn_r101_caffe_fpn_1x_coco_20200504_180057.log.json) |
+| R-101-FPN | pytorch | 1x | 6.0 | 15.6 | 39.4 | [config](./faster-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r101_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_1x_coco/faster_rcnn_r101_fpn_1x_coco_20200130_204655.log.json) |
+| R-101-FPN | pytorch | 2x | - | - | 39.8 | [config](./faster-rcnn_r101_fpn_2x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r101_fpn_2x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_2x_coco/faster_rcnn_r101_fpn_2x_coco_20200504_210455.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 7.2 | 13.8 | 41.2 | [config](./faster-rcnn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-32x4d_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_1x_coco/faster_rcnn_x101_32x4d_fpn_1x_coco_20200203_000520.log.json) |
+| X-101-32x4d-FPN | pytorch | 2x | - | - | 41.2 | [config](./faster-rcnn_x101-32x4d_fpn_2x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-32x4d_fpn_2x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_2x_coco/faster_rcnn_x101_32x4d_fpn_2x_coco_20200506_041400.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 10.3 | 9.4 | 42.1 | [config](./faster-rcnn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-64x4d_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_1x_coco/faster_rcnn_x101_64x4d_fpn_1x_coco_20200204_134340.log.json) |
+| X-101-64x4d-FPN | pytorch | 2x | - | - | 41.6 | [config](./faster-rcnn_x101-64x4d_fpn_2x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-64x4d_fpn_2x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_2x_coco/faster_rcnn_x101_64x4d_fpn_2x_coco_20200512_161033.log.json) |
+
+## Different regression loss
+
+We trained with R-50-FPN pytorch style backbone for 1x schedule.
+
+| Backbone | Loss type | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :------------: | :------: | :------------: | :----: | :----------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | L1Loss | 4.0 | 21.4 | 37.4 | [config](./faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50_fpn_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130_204655.log.json) |
+| R-50-FPN | IoULoss | | | 37.9 | [config](./faster-rcnn_r50_fpn_iou_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50_fpn_iou_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_iou_1x_coco/faster_rcnn_r50_fpn_iou_1x_coco_20200506_095954.log.json) |
+| R-50-FPN | GIoULoss | | | 37.6 | [config](./faster-rcnn_r50_fpn_giou_1x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50_fpn_giou_1x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_giou_1x_coco_20200505_161120.log.json) |
+| R-50-FPN | BoundedIoULoss | | | 37.4 | [config](./faster-rcnn_r50_fpn_bounded-iou_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_bounded_iou_1x_coco-98ad993b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_bounded_iou_1x_coco_20200505_160738.log.json) |
+
+## Pre-trained Models
+
+We also train some models with longer schedules and multi-scale training. The users could finetune them for downstream tasks.
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-----------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :--------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-C4](./faster-rcnn_r50-caffe-c4_ms-1x_coco.py) | caffe | 1x | - | | 35.9 | [config](./faster-rcnn_r50-caffe-c4_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_c4_mstrain_1x_coco/faster_rcnn_r50_caffe_c4_mstrain_1x_coco_20220316_150527-db276fed.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_c4_mstrain_1x_coco/faster_rcnn_r50_caffe_c4_mstrain_1x_coco_20220316_150527.log.json) |
+| [R-50-DC5](./faster-rcnn_r50-caffe-dc5_ms-1x_coco.py) | caffe | 1x | - | | 37.4 | [config](./faster-rcnn_r50-caffe-dc5_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco_20201028_233851-b33d21b9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco_20201028_233851.log.json) |
+| [R-50-DC5](./faster-rcnn_r50-caffe-dc5_ms-3x_coco.py) | caffe | 3x | - | | 38.7 | [config](./faster-rcnn_r50-caffe-dc5_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco_20201028_002107-34a53b2c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco_20201028_002107.log.json) |
+| [R-50-FPN](./faster-rcnn_r50-caffe_fpn_ms-2x_coco.py) | caffe | 2x | 3.7 | | 39.7 | [config](./faster-rcnn_r50-caffe_fpn_ms-2x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50-caffe_fpn_ms-2x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_2x_coco/faster_rcnn_r50_caffe_fpn_mstrain_2x_coco_20200504_231813.log.json) |
+| [R-50-FPN](./faster-rcnn_r50-caffe_fpn_ms-3x_coco.py) | caffe | 3x | 3.7 | | 39.9 | [config](./faster-rcnn_r50-caffe_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r50-caffe_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco_20210526_095054.log.json) |
+| [R-50-FPN](./faster-rcnn_r50_fpn_ms-3x_coco.py) | pytorch | 3x | 3.9 | | 40.3 | [config](./faster-rcnn_r50_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_mstrain_3x_coco/faster_rcnn_r50_fpn_mstrain_3x_coco_20210524_110822-e10bd31c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_mstrain_3x_coco/faster_rcnn_r50_fpn_mstrain_3x_coco_20210524_110822.log.json) |
+| [R-101-FPN](./faster-rcnn_r101-caffe_fpn_ms-3x_coco.py) | caffe | 3x | 5.6 | | 42.0 | [config](./faster-rcnn_r101-caffe_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r101-caffe_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_caffe_fpn_mstrain_3x_coco/faster_rcnn_r101_caffe_fpn_mstrain_3x_coco_20210526_095742.log.json) |
+| [R-101-FPN](./faster-rcnn_r101_fpn_ms-3x_coco.py) | pytorch | 3x | 5.8 | | 41.8 | [config](./faster-rcnn_r101_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_r101_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_mstrain_3x_coco/faster_rcnn_r101_fpn_mstrain_3x_coco_20210524_110822.log.json) |
+| [X-101-32x4d-FPN](./faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py) | pytorch | 3x | 7.0 | | 42.5 | [config](./faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-32x4d_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_mstrain_3x_coco/faster_rcnn_x101_32x4d_fpn_mstrain_3x_coco_20210524_124151.log.json) |
+| [X-101-32x8d-FPN](./faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py) | pytorch | 3x | 10.1 | | 42.4 | [config](./faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-32x8d_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x8d_fpn_mstrain_3x_coco/faster_rcnn_x101_32x8d_fpn_mstrain_3x_coco_20210604_182954.log.json) |
+| [X-101-64x4d-FPN](./faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py) | pytorch | 3x | 10.0 | | 43.1 | [config](./faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py) | [model](https://download.openxlab.org.cn/models/mmdetection/FasterR-CNN/weight/faster-rcnn_x101-64x4d_fpn_ms-3x_coco) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_mstrain_3x_coco/faster_rcnn_x101_64x4d_fpn_mstrain_3x_coco_20210524_124528.log.json) |
+
+We further finetune some pre-trained models on the COCO subsets, which only contain only a few of the 80 categories.
+
+| Backbone | Style | Class name | Pre-traind model | Mem (GB) | box AP | Config | Download |
+| ------------------------------------------------------------------------ | ----- | ------------------ | -------------------------------------------------------------- | -------- | ------ | ---------------------------------------------------------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+| [R-50-FPN](./faster-rcnn_r50-caffe_fpn_ms-1x_coco-person.py) | caffe | person | [R-50-FPN-Caffe-3x](./faster-rcnn_r50-caffe_fpn_ms-3x_coco.py) | 3.7 | 55.8 | [config](./faster-rcnn_r50-caffe_fpn_ms-1x_coco-person.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco-person/faster_rcnn_r50_fpn_1x_coco-person_20201216_175929-d022e227.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco-person/faster_rcnn_r50_fpn_1x_coco-person_20201216_175929.log.json) |
+| [R-50-FPN](./faster-rcnn_r50-caffe_fpn_ms-1x_coco-person-bicycle-car.py) | caffe | person-bicycle-car | [R-50-FPN-Caffe-3x](./faster-rcnn_r50-caffe_fpn_ms-3x_coco.py) | 3.7 | 44.1 | [config](./faster-rcnn_r50-caffe_fpn_ms-1x_coco-person-bicycle-car.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco-person-bicycle-car/faster_rcnn_r50_fpn_1x_coco-person-bicycle-car_20201216_173117-6eda6d92.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco-person-bicycle-car/faster_rcnn_r50_fpn_1x_coco-person-bicycle-car_20201216_173117.log.json) |
+
+## Torchvision New Receipe (TNR)
+
+Torchvision released its high-precision ResNet models. The training details can be found on the [Pytorch website](https://pytorch.org/blog/how-to-train-state-of-the-art-models-using-torchvision-latest-primitives/). Here, we have done grid searches on learning rate and weight decay and found the optimal hyper-parameter on the detection task.
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :--------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-TNR](./faster-rcnn_r50-tnr-pre_fpn_1x_coco.py) | pytorch | 1x | - | | 40.2 | [config](./faster-rcnn_r50-tnr-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco_20220320_085147-efedfda4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco_20220320_085147.log.json) |
+
+## Citation
+
+```latex
+@article{Ren_2017,
+ title={Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks},
+ journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
+ publisher={Institute of Electrical and Electronics Engineers (IEEE)},
+ author={Ren, Shaoqing and He, Kaiming and Girshick, Ross and Sun, Jian},
+ year={2017},
+ month={Jun},
+}
+```
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a18f1ada31ed2a2d1023d16470a271ad49c3be2e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './faster-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1cdb4d4973e364c4f37b80644388a4859f55772e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_ms-3x_coco.py
@@ -0,0 +1,11 @@
+_base_ = 'faster-rcnn_r50_fpn_ms-3x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d113ae6295fdc3f3058ef498eb9b675154a05c12
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b471fb3cbd8a79165e0cd19afc3ba98bbcfeb74e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a71d4afd3246d083bdf0f5a84be2fbf2340f621f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './faster-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8ef6d1f8ea6b45e9a4bfe438910da827d079479b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r101_fpn_ms-3x_coco.py
@@ -0,0 +1,7 @@
+_base_ = 'faster-rcnn_r50_fpn_ms-3x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..65515c9ace8bf4445a77db2485fc8d3f95c263b9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './faster-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-c4_ms-1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-c4_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7e231e865270acf0383e03a64f151efdbf88c29e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-c4_ms-1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50-caffe_c4-1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+_base_.train_dataloader.dataset.pipeline = train_pipeline
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8952a5c9c6c2fe019711968fa2aa7ed2065b13f6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_1x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50-caffe-dc5.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..63a68859a85fe5556e927c04aae5cafbef1fc0b6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = 'faster-rcnn_r50-caffe-dc5_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+_base_.train_dataloader.dataset.pipeline = train_pipeline
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..27063468a70436a62a7cc54b8c8efc2de96ec33f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './faster-rcnn_r50-caffe-dc5_ms-1x_coco.py'
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# param_scheduler = [
+# dict(
+# type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500), # noqa
+# dict(
+# type='MultiStepLR',
+# begin=0,
+# end=12,
+# by_epoch=True,
+# milestones=[28, 34],
+# gamma=0.1)
+# ]
+_base_.param_scheduler[1].milestones = [28, 34]
+
+train_cfg = dict(max_epochs=36)
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_c4-1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_c4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0888fc01790af82a4c7131280ca5f0247b28d9fd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_c4-1x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50-caffe-c4.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9129a9583c52bf8ccab38a65f35c9f14bb128d07
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_90k_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..27f49355f3be8f6a53038894405c5f1b3d9b46fa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_90k_coco.py
@@ -0,0 +1,22 @@
+_base_ = 'faster-rcnn_r50-caffe_fpn_1x_coco.py'
+max_iter = 90000
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iter,
+ by_epoch=False,
+ milestones=[60000, 80000],
+ gamma=0.1)
+]
+
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=max_iter,
+ val_interval=10000)
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=10000))
+log_processor = dict(by_epoch=False)
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person-bicycle-car.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person-bicycle-car.py
new file mode 100644
index 0000000000000000000000000000000000000000..f36bb055f87aeadc43aa1233d1d3a7bdc33fbd80
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person-bicycle-car.py
@@ -0,0 +1,16 @@
+_base_ = './faster-rcnn_r50-caffe_fpn_ms-1x_coco.py'
+model = dict(roi_head=dict(bbox_head=dict(num_classes=3)))
+metainfo = {
+ 'classes': ('person', 'bicycle', 'car'),
+ 'palette': [
+ (220, 20, 60),
+ (119, 11, 32),
+ (0, 0, 142),
+ ]
+}
+
+train_dataloader = dict(dataset=dict(metainfo=metainfo))
+val_dataloader = dict(dataset=dict(metainfo=metainfo))
+test_dataloader = dict(dataset=dict(metainfo=metainfo))
+
+load_from = 'https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco_bbox_mAP-0.398_20200504_163323-30042637.pth' # noqa
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person.py
new file mode 100644
index 0000000000000000000000000000000000000000..9528b63f4deabb3610a26af59c856cee62c489c2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco-person.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50-caffe_fpn_ms-1x_coco.py'
+model = dict(roi_head=dict(bbox_head=dict(num_classes=1)))
+metainfo = {
+ 'classes': ('person', ),
+ 'palette': [
+ (220, 20, 60),
+ ]
+}
+
+train_dataloader = dict(dataset=dict(metainfo=metainfo))
+val_dataloader = dict(dataset=dict(metainfo=metainfo))
+test_dataloader = dict(dataset=dict(metainfo=metainfo))
+
+load_from = 'https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco_bbox_mAP-0.398_20200504_163323-30042637.pth' # noqa
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..59f1633c807f3eb904657cfaf97113c355df3fca
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-1x_coco.py
@@ -0,0 +1,31 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+_base_.train_dataloader.dataset.pipeline = train_pipeline
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..44d320ea01ba53d591ab7db29742e7fffc7c81ce
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-2x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './faster-rcnn_r50-caffe_fpn_ms-1x_coco.py'
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# param_scheduler = [
+# dict(
+# type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500), # noqa
+# dict(
+# type='MultiStepLR',
+# begin=0,
+# end=12,
+# by_epoch=True,
+# milestones=[16, 23],
+# gamma=0.1)
+# ]
+_base_.param_scheduler[1].milestones = [16, 23]
+
+train_cfg = dict(max_epochs=24)
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..365f6439241c6374554af1fd58a114ef03448877
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-3x_coco.py
@@ -0,0 +1,15 @@
+_base_ = 'faster-rcnn_r50_fpn_ms-3x_coco.py'
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-90k_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b9b3eb0e79b1ffb71d15c21274692d3b85e16ac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-90k_coco.py
@@ -0,0 +1,23 @@
+_base_ = 'faster-rcnn_r50-caffe_fpn_ms-1x_coco.py'
+
+max_iter = 90000
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iter,
+ by_epoch=False,
+ milestones=[60000, 80000],
+ gamma=0.1)
+]
+
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=max_iter,
+ val_interval=10000)
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=10000))
+log_processor = dict(by_epoch=False)
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-tnr-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-tnr-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7b3e5dedbe81b927492dd41b13f017bcc2bd4c92
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50-tnr-pre_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+checkpoint = 'https://download.pytorch.org/models/resnet50-11ad3fa6.pth'
+model = dict(
+ backbone=dict(init_cfg=dict(type='Pretrained', checkpoint=checkpoint)))
+
+# `lr` and `weight_decay` have been searched to be optimal.
+optim_wrapper = dict(
+ optimizer=dict(_delete_=True, type='AdamW', lr=0.0001, weight_decay=0.1),
+ paramwise_cfg=dict(norm_decay_mult=0., bypass_duplicate=True))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8a45417fdd4566241114e20275990a5729486932
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2981c6fbe16eb7a8b6ca1202ebb6325e2324c040
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_2x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d366f3ba0e5ff098db3e409171a88860f1cf3af
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,20 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../common/lsj-200e_coco-detection.py'
+]
+image_size = (1024, 1024)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+model = dict(data_preprocessor=dict(batch_augments=batch_augments))
+
+train_dataloader = dict(batch_size=8, num_workers=4)
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.02 * 4, momentum=0.9, weight_decay=0.00004))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_amp-1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_amp-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f765deaef1db8a798c44d848c6f759755ccd4c45
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_amp-1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# optim_wrapper = dict(type='AmpOptimWrapper')
+_base_.optim_wrapper.type = 'AmpOptimWrapper'
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_bounded-iou_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_bounded-iou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7758ca80b372e7895be267cad8c4603778d160b3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_bounded-iou_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ reg_decoded_bbox=True,
+ loss_bbox=dict(type='BoundedIoULoss', loss_weight=10.0))))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ciou_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ciou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e8d8a3042750e8f5f9478b5e8c3111d8b7a10528
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ciou_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ reg_decoded_bbox=True,
+ loss_bbox=dict(type='CIoULoss', loss_weight=12.0))))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_fcos-rpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_fcos-rpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b5a34d9f74a60388fa60afd8255d470c45f209f7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_fcos-rpn_1x_coco.py
@@ -0,0 +1,48 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ # copied from configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py
+ neck=dict(
+ start_level=1,
+ add_extra_convs='on_output', # use P5
+ relu_before_extra_convs=True),
+ rpn_head=dict(
+ _delete_=True, # ignore the unused old settings
+ type='FCOSHead',
+ # num_classes = 1 for rpn,
+ # if num_classes > 1, it will be set to 1 in
+ # TwoStageDetector automatically
+ num_classes=1,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='IoULoss', loss_weight=1.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ roi_head=dict( # update featmap_strides
+ bbox_roi_extractor=dict(featmap_strides=[8, 16, 32, 64, 128])))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0,
+ end=1000), # Slowly increase lr, otherwise loss becomes NAN
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_giou_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_giou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..82b71d77bfc448eceadcd03a6c8cbc4c8f871109
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_giou_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ reg_decoded_bbox=True,
+ loss_bbox=dict(type='GIoULoss', loss_weight=10.0))))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_iou_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_iou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e21c43640cb7004e8e4ef189ff8843ad39de3c6f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_iou_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ reg_decoded_bbox=True,
+ loss_bbox=dict(type='IoULoss', loss_weight=10.0))))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..75dcfeb7a2310938c05cc103fadec6c6e119b90b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ms-3x_coco.py
@@ -0,0 +1 @@
+_base_ = ['../common/ms_3x_coco.py', '../_base_/models/faster-rcnn_r50_fpn.py']
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ohem_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ohem_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4f804b9be283015d4ec349f0df664e9ca7326c96
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_ohem_1x_coco.py
@@ -0,0 +1,2 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(train_cfg=dict(rcnn=dict(sampler=dict(type='OHEMSampler'))))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_soft-nms_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_soft-nms_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3775d8e447cb80c0fc28199be2abc4c23383eadd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_r50_fpn_soft-nms_1x_coco.py
@@ -0,0 +1,12 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.05,
+ nms=dict(type='soft_nms', iou_threshold=0.5),
+ max_per_img=100)))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..395c98cd65cd5f883c9fe206a7b9c99e59acb32e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6232d0edba51f433a930c46d03c49fc27954303f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..88cb40fd62a87a8af13e166df16a348c26e6d29e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py
@@ -0,0 +1,14 @@
+_base_ = ['../common/ms_3x_coco.py', '../_base_/models/faster-rcnn_r50_fpn.py']
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..28d6290be7a75b7cceef8957e872e221fd3e78f5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py
@@ -0,0 +1,23 @@
+_base_ = ['../common/ms_3x_coco.py', '../_base_/models/faster-rcnn_r50_fpn.py']
+model = dict(
+ # ResNeXt-101-32x8d model trained with Caffe2 at FB,
+ # so the mean and std need to be changed.
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[57.375, 57.120, 58.395],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=8,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnext101_32x8d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f39d6322fc3a4729ea7bbfefc207a6975efb4bf4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..97a3c1338fe294f66109fa92de0d8a48686b8a09
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './faster-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..eeaa218c9dc76123791d9e19b0ebae687cc296c9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py
@@ -0,0 +1,14 @@
+_base_ = ['../common/ms_3x_coco.py', '../_base_/models/faster-rcnn_r50_fpn.py']
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/faster_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/faster_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..6a201e177bad065235dd1346c1d36017c4359214
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/faster_rcnn/metafile.yml
@@ -0,0 +1,451 @@
+Collections:
+ - Name: Faster R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - RPN
+ - ResNet
+ - RoIPool
+ Paper:
+ URL: https://arxiv.org/abs/1506.01497
+ Title: "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks"
+ README: configs/faster_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/faster_rcnn.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: faster-rcnn_r50-caffe-c4_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe_c4-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 35.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_c4_1x_coco/faster_rcnn_r50_caffe_c4_1x_coco_20220316_150152-3f885b85.pth
+
+ - Name: faster-rcnn_r50-caffe-c4_mstrain_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe-c4_ms-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 35.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_c4_mstrain_1x_coco/faster_rcnn_r50_caffe_c4_mstrain_1x_coco_20220316_150527-db276fed.pth
+
+ - Name: faster-rcnn_r50-caffe-dc5_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_1x_coco/faster_rcnn_r50_caffe_dc5_1x_coco_20201030_151909-531f0f43.pth
+
+ - Name: faster-rcnn_r50-caffe_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_1x_coco/faster_rcnn_r50_caffe_fpn_1x_coco_bbox_mAP-0.378_20200504_180032-c5925ee5.pth
+
+ - Name: faster-rcnn_r50_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.0
+ inference time (ms/im):
+ - value: 46.73
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth
+
+ - Name: faster-rcnn_r50_fpn_fp16_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_amp-1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.4
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ - Mixed Precision Training
+ inference time (ms/im):
+ - value: 34.72
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP16
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fp16/faster_rcnn_r50_fpn_fp16_1x_coco/faster_rcnn_r50_fpn_fp16_1x_coco_20200204-d4dc1471.pth
+
+ - Name: faster-rcnn_r50_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 4.0
+ inference time (ms/im):
+ - value: 46.73
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_2x_coco/faster_rcnn_r50_fpn_2x_coco_bbox_mAP-0.384_20200504_210434-a5d8aa15.pth
+
+ - Name: faster-rcnn_r101-caffe_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.7
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_caffe_fpn_1x_coco/faster_rcnn_r101_caffe_fpn_1x_coco_bbox_mAP-0.398_20200504_180057-b269e9dd.pth
+
+ - Name: faster-rcnn_r101_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.0
+ inference time (ms/im):
+ - value: 64.1
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_1x_coco/faster_rcnn_r101_fpn_1x_coco_20200130-f513f705.pth
+
+ - Name: faster-rcnn_r101_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 6.0
+ inference time (ms/im):
+ - value: 64.1
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_2x_coco/faster_rcnn_r101_fpn_2x_coco_bbox_mAP-0.398_20200504_210455-1d2dac9c.pth
+
+ - Name: faster-rcnn_x101-32x4d_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ inference time (ms/im):
+ - value: 72.46
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_1x_coco/faster_rcnn_x101_32x4d_fpn_1x_coco_20200203-cff10310.pth
+
+ - Name: faster-rcnn_x101-32x4d_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ inference time (ms/im):
+ - value: 72.46
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_2x_coco/faster_rcnn_x101_32x4d_fpn_2x_coco_bbox_mAP-0.412_20200506_041400-64a12c0b.pth
+
+ - Name: faster-rcnn_x101-64x4d_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ inference time (ms/im):
+ - value: 106.38
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_1x_coco/faster_rcnn_x101_64x4d_fpn_1x_coco_20200204-833ee192.pth
+
+ - Name: faster-rcnn_x101-64x4d_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ inference time (ms/im):
+ - value: 106.38
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_2x_coco/faster_rcnn_x101_64x4d_fpn_2x_coco_20200512_161033-5961fa95.pth
+
+ - Name: faster-rcnn_r50_fpn_iou_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_iou_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_iou_1x_coco/faster_rcnn_r50_fpn_iou_1x_coco_20200506_095954-938e81f0.pth
+
+ - Name: faster-rcnn_r50_fpn_giou_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_giou_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_giou_1x_coco-0eada910.pth
+
+ - Name: faster-rcnn_r50_fpn_bounded_iou_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_bounded-iou_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_bounded_iou_1x_coco-98ad993b.pth
+
+ - Name: faster-rcnn_r50-caffe-dc5_mstrain_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco/faster_rcnn_r50_caffe_dc5_mstrain_1x_coco_20201028_233851-b33d21b9.pth
+
+ - Name: faster-rcnn_r50-caffe-dc5_mstrain_3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe-dc5_ms-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco/faster_rcnn_r50_caffe_dc5_mstrain_3x_coco_20201028_002107-34a53b2c.pth
+
+ - Name: faster-rcnn_r50-caffe_fpn_ms-2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-2x_coco.py
+ Metadata:
+ Training Memory (GB): 4.3
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_2x_coco/faster_rcnn_r50_caffe_fpn_mstrain_2x_coco_bbox_mAP-0.397_20200504_231813-10b2de58.pth
+
+ - Name: faster-rcnn_r50-caffe_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-caffe_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco/faster_rcnn_r50_caffe_fpn_mstrain_3x_coco_20210526_095054-1f77628b.pth
+
+ - Name: faster-rcnn_r50_fpn_mstrain_3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_mstrain_3x_coco/faster_rcnn_r50_fpn_mstrain_3x_coco_20210524_110822-e10bd31c.pth
+
+ - Name: faster-rcnn_r101-caffe_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r101-caffe_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.6
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_caffe_fpn_mstrain_3x_coco/faster_rcnn_r101_caffe_fpn_mstrain_3x_coco_20210526_095742-a7ae426d.pth
+
+ - Name: faster-rcnn_r101_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r101_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.8
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_mstrain_3x_coco/faster_rcnn_r101_fpn_mstrain_3x_coco_20210524_110822-4d4d2ca8.pth
+
+ - Name: faster-rcnn_x101-32x4d_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-32x4d_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x4d_fpn_mstrain_3x_coco/faster_rcnn_x101_32x4d_fpn_mstrain_3x_coco_20210524_124151-16b9b260.pth
+
+ - Name: faster-rcnn_x101-32x8d_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-32x8d_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 10.1
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_32x8d_fpn_mstrain_3x_coco/faster_rcnn_x101_32x8d_fpn_mstrain_3x_coco_20210604_182954-002e082a.pth
+
+ - Name: faster-rcnn_x101-64x4d_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_x101-64x4d_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 10.0
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_x101_64x4d_fpn_mstrain_3x_coco/faster_rcnn_x101_64x4d_fpn_mstrain_3x_coco_20210524_124528-26c63de6.pth
+
+ - Name: faster-rcnn_r50_fpn_tnr-pretrain_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/faster_rcnn/faster-rcnn_r50-tnr-pre_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.0
+ inference time (ms/im):
+ - value: 46.73
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco/faster_rcnn_r50_fpn_tnr-pretrain_1x_coco_20220320_085147-efedfda4.pth
diff --git a/grounding-dino/mmdetection/configs/fcos/README.md b/grounding-dino/mmdetection/configs/fcos/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..8d72237a059793385b43b04b7e77f3392fe30d5e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/README.md
@@ -0,0 +1,45 @@
+# FCOS
+
+> [FCOS: Fully Convolutional One-Stage Object Detection](https://arxiv.org/abs/1904.01355)
+
+
+
+## Abstract
+
+We propose a fully convolutional one-stage object detector (FCOS) to solve object detection in a per-pixel prediction fashion, analogue to semantic segmentation. Almost all state-of-the-art object detectors such as RetinaNet, SSD, YOLOv3, and Faster R-CNN rely on pre-defined anchor boxes. In contrast, our proposed detector FCOS is anchor box free, as well as proposal free. By eliminating the predefined set of anchor boxes, FCOS completely avoids the complicated computation related to anchor boxes such as calculating overlapping during training. More importantly, we also avoid all hyper-parameters related to anchor boxes, which are often very sensitive to the final detection performance. With the only post-processing non-maximum suppression (NMS), FCOS with ResNeXt-64x4d-101 achieves 44.7% in AP with single-model and single-scale testing, surpassing previous one-stage detectors with the advantage of being much simpler. For the first time, we demonstrate a much simpler and flexible detection framework achieving improved detection accuracy. We hope that the proposed FCOS framework can serve as a simple and strong alternative for many other instance-level tasks.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | GN | MS train | Tricks | DCN | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :---: | :-: | :------: | :----: | :-: | :-----: | :------: | :------------: | :----: | :------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | caffe | Y | N | N | N | 1x | 3.6 | 22.7 | 36.6 | [config](./fcos_r50-caffe_fpn_gn-head_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_1x_coco/fcos_r50_caffe_fpn_gn-head_1x_coco-821213aa.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_1x_coco/20201227_180009.log.json) |
+| R-50 | caffe | Y | N | Y | N | 1x | 3.7 | - | 38.7 | [config](./fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_1x_coco/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_1x_coco-0a0d75a8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_1x_coco/20210105_135818.log.json) |
+| R-50 | caffe | Y | N | Y | Y | 1x | 3.8 | - | 42.3 | [config](./fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_dcn_1x_coco/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_dcn_1x_coco-ae4d8b3d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_dcn_1x_coco/20210105_224556.log.json) |
+| R-101 | caffe | Y | N | N | N | 1x | 5.5 | 17.3 | 39.1 | [config](./fcos_r101-caffe_fpn_gn-head-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_1x_coco/fcos_r101_caffe_fpn_gn-head_1x_coco-0e37b982.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_1x_coco/20210103_155046.log.json) |
+
+| Backbone | Style | GN | MS train | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :-----: | :-: | :------: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | caffe | Y | Y | 2x | 2.6 | 22.9 | 38.5 | [config](./fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_mstrain_640-800_2x_coco/fcos_r50_caffe_fpn_gn-head_mstrain_640-800_2x_coco-d92ceeea.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_mstrain_640-800_2x_coco/20201227_161900.log.json) |
+| R-101 | caffe | Y | Y | 2x | 5.5 | 17.3 | 40.8 | [config](./fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_mstrain_640-800_2x_coco/fcos_r101_caffe_fpn_gn-head_mstrain_640-800_2x_coco-511424d6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_mstrain_640-800_2x_coco/20210103_155046.log.json) |
+| X-101 | pytorch | Y | Y | 2x | 10.0 | 9.7 | 42.6 | [config](./fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_x101_64x4d_fpn_gn-head_mstrain_640-800_2x_coco/fcos_x101_64x4d_fpn_gn-head_mstrain_640-800_2x_coco-ede514a8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_x101_64x4d_fpn_gn-head_mstrain_640-800_2x_coco/20210114_133041.log.json) |
+
+**Notes:**
+
+- The X-101 backbone is X-101-64x4d.
+- Tricks means setting `norm_on_bbox`, `centerness_on_reg`, `center_sampling` as `True`.
+- DCN means using `DCNv2` in both backbone and head.
+
+## Citation
+
+```latex
+@article{tian2019fcos,
+ title={FCOS: Fully Convolutional One-Stage Object Detection},
+ author={Tian, Zhi and Shen, Chunhua and Chen, Hao and He, Tong},
+ journal={arXiv preprint arXiv:1904.01355},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head-1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5380e87483e494b4c0bc6d8846c6892811d581d3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head-1x_coco.py
@@ -0,0 +1,9 @@
+_base_ = './fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..286a07a2db2c6fc423f6cf039b2609ac81ede73d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco.py
@@ -0,0 +1,38 @@
+_base_ = './fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet101_caffe')))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# training schedule for 2x
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(type='ConstantLR', factor=1.0 / 3, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r101_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r101_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..77250e6917812d3494c8dabd52a3ed12f5f34483
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r101_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './fcos_r50_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py' # noqa
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r18_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r18_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f001024bb702c5ed0cb1103c5e10ae3cd7f599b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r18_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './fcos_r50_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py' # noqa
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2a77641dd87142d5c6d508f2f4a4ba5b70db52c1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
@@ -0,0 +1,43 @@
+_base_ = 'fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model setting
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ bbox_head=dict(
+ norm_on_bbox=True,
+ centerness_on_reg=True,
+ dcn_on_last_conv=False,
+ center_sampling=True,
+ conv_bias=True,
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.0)),
+ # training and testing settings
+ test_cfg=dict(nms=dict(type='nms', iou_threshold=0.6)))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3.0,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(clip_grad=None)
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center_1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9e4eb1d5981761fab8fe0bb876ff7ef243ac31f9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head-center_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = './fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model settings
+model = dict(bbox_head=dict(center_sampling=True, center_sample_radius=1.5))
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..928a9b4c92d217822179c0ae00ae50f6f74289b1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py
@@ -0,0 +1,75 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model settings
+model = dict(
+ type='FCOS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[102.9801, 115.9465, 122.7717],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet50_caffe')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output', # use P5
+ num_outs=5,
+ relu_before_extra_convs=True),
+ bbox_head=dict(
+ type='FCOSHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='IoULoss', loss_weight=1.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # testing settings
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100))
+
+# learning rate
+param_scheduler = [
+ dict(type='ConstantLR', factor=1.0 / 3, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.01),
+ paramwise_cfg=dict(bias_lr_mult=2., bias_decay_mult=0.),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..32358cd3c69800874aa77ba5746ffc0d6f3a219d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_4xb4-1x_coco.py
@@ -0,0 +1,5 @@
+# TODO: Remove this config after benchmarking all related configs
+_base_ = 'fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# dataset settings
+train_dataloader = dict(batch_size=4, num_workers=4)
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d50b4ec6c4a10b07cbf73475e7af545b058605c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco.py
@@ -0,0 +1,30 @@
+_base_ = './fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# training schedule for 2x
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(type='ConstantLR', factor=1.0 / 3, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a6a6c44f9b4213601b447bc02720e24dc86a53d9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = 'fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model settings
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ bbox_head=dict(
+ norm_on_bbox=True,
+ centerness_on_reg=True,
+ dcn_on_last_conv=True,
+ center_sampling=True,
+ conv_bias=True,
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.0)),
+ # training and testing settings
+ test_cfg=dict(nms=dict(type='nms', iou_threshold=0.6)))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3.0,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(clip_grad=None)
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_r50_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_r50_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b51556b8eb7f844866d7acff5c7b86c08cb2a054
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_r50_fpn_gn-head-center-normbbox-centeronreg-giou_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,75 @@
+_base_ = '../common/lsj-200e_coco-detection.py'
+
+image_size = (1024, 1024)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+# model settings
+model = dict(
+ type='FCOS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ batch_augments=batch_augments),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output', # use P5
+ num_outs=5,
+ relu_before_extra_convs=True),
+ bbox_head=dict(
+ type='FCOSHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ norm_on_bbox=True,
+ centerness_on_reg=True,
+ dcn_on_last_conv=False,
+ center_sampling=True,
+ conv_bias=True,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # testing settings
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+train_dataloader = dict(batch_size=8, num_workers=4)
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.01 * 4, momentum=0.9, weight_decay=0.00004),
+ paramwise_cfg=dict(bias_lr_mult=2., bias_decay_mult=0.),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/fcos/fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco.py b/grounding-dino/mmdetection/configs/fcos/fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..503c0e1ce79bdbc9f2a32cc65f977b0f1e968927
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco.py
@@ -0,0 +1,52 @@
+_base_ = './fcos_r50-caffe_fpn_gn-head_1x_coco.py'
+
+# model settings
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# training schedule for 2x
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(type='ConstantLR', factor=1.0 / 3, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/fcos/metafile.yml b/grounding-dino/mmdetection/configs/fcos/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fb6527cf2d418762ae1a4a9298ade3da54ece5df
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fcos/metafile.yml
@@ -0,0 +1,146 @@
+Collections:
+ - Name: FCOS
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - Group Normalization
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1904.01355
+ Title: 'FCOS: Fully Convolutional One-Stage Object Detection'
+ README: configs/fcos/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/fcos.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: fcos_r50-caffe_fpn_gn-head_1x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.6
+ inference time (ms/im):
+ - value: 44.05
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_1x_coco/fcos_r50_caffe_fpn_gn-head_1x_coco-821213aa.pth
+
+ - Name: fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r50-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_1x_coco/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_1x_coco-0a0d75a8.pth
+
+ - Name: fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r50-dcn-caffe_fpn_gn-head-center-normbbox-centeronreg-giou_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_dcn_1x_coco/fcos_center-normbbox-centeronreg-giou_r50_caffe_fpn_gn-head_dcn_1x_coco-ae4d8b3d.pth
+
+ - Name: fcos_r101-caffe_fpn_gn-head-1x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r101-caffe_fpn_gn-head-1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ inference time (ms/im):
+ - value: 57.8
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_1x_coco/fcos_r101_caffe_fpn_gn-head_1x_coco-0e37b982.pth
+
+ - Name: fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r50-caffe_fpn_gn-head_ms-640-800-2x_coco.py
+ Metadata:
+ Training Memory (GB): 2.6
+ inference time (ms/im):
+ - value: 43.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r50_caffe_fpn_gn-head_mstrain_640-800_2x_coco/fcos_r50_caffe_fpn_gn-head_mstrain_640-800_2x_coco-d92ceeea.pth
+
+ - Name: fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_r101-caffe_fpn_gn-head_ms-640-800-2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ inference time (ms/im):
+ - value: 57.8
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_r101_caffe_fpn_gn-head_mstrain_640-800_2x_coco/fcos_r101_caffe_fpn_gn-head_mstrain_640-800_2x_coco-511424d6.pth
+
+ - Name: fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco
+ In Collection: FCOS
+ Config: configs/fcos/fcos_x101-64x4d_fpn_gn-head_ms-640-800-2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.0
+ inference time (ms/im):
+ - value: 103.09
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fcos/fcos_x101_64x4d_fpn_gn-head_mstrain_640-800_2x_coco/fcos_x101_64x4d_fpn_gn-head_mstrain_640-800_2x_coco-ede514a8.pth
diff --git a/grounding-dino/mmdetection/configs/foveabox/README.md b/grounding-dino/mmdetection/configs/foveabox/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..96f1358b11840e5e03d1a640969a8d18d6197588
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/README.md
@@ -0,0 +1,53 @@
+# FoveaBox
+
+> [FoveaBox: Beyond Anchor-based Object Detector](https://arxiv.org/abs/1904.03797)
+
+
+
+## Abstract
+
+We present FoveaBox, an accurate, flexible, and completely anchor-free framework for object detection. While almost all state-of-the-art object detectors utilize predefined anchors to enumerate possible locations, scales and aspect ratios for the search of the objects, their performance and generalization ability are also limited to the design of anchors. Instead, FoveaBox directly learns the object existing possibility and the bounding box coordinates without anchor reference. This is achieved by: (a) predicting category-sensitive semantic maps for the object existing possibility, and (b) producing category-agnostic bounding box for each position that potentially contains an object. The scales of target boxes are naturally associated with feature pyramid representations. In FoveaBox, an instance is assigned to adjacent feature levels to make the model more accurate.We demonstrate its effectiveness on standard benchmarks and report extensive experimental analysis. Without bells and whistles, FoveaBox achieves state-of-the-art single model performance on the standard COCO and Pascal VOC object detection benchmark. More importantly, FoveaBox avoids all computation and hyper-parameters related to anchor boxes, which are often sensitive to the final detection performance. We believe the simple and effective approach will serve as a solid baseline and help ease future research for object detection.
+
+
+
+ +
+
+
+## Introduction
+
+FoveaBox is an accurate, flexible and completely anchor-free object detection system for object detection framework, as presented in our paper [https://arxiv.org/abs/1904.03797](https://arxiv.org/abs/1904.03797):
+Different from previous anchor-based methods, FoveaBox directly learns the object existing possibility and the bounding box coordinates without anchor reference. This is achieved by: (a) predicting category-sensitive semantic maps for the object existing possibility, and (b) producing category-agnostic bounding box for each position that potentially contains an object.
+
+## Results and Models
+
+### Results on R50/101-FPN
+
+| Backbone | Style | align | ms-train | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------: | :-----: | :---: | :------: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | N | N | 1x | 5.6 | 24.1 | 36.5 | [config](./fovea_r50_fpn_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_1x_coco/fovea_r50_fpn_4x4_1x_coco_20200219-ee4d5303.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_1x_coco/fovea_r50_fpn_4x4_1x_coco_20200219_223025.log.json) |
+| R-50 | pytorch | N | N | 2x | 5.6 | - | 37.2 | [config](./fovea_r50_fpn_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_2x_coco/fovea_r50_fpn_4x4_2x_coco_20200203-2df792b1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_2x_coco/fovea_r50_fpn_4x4_2x_coco_20200203_112043.log.json) |
+| R-50 | pytorch | Y | N | 2x | 8.1 | 19.4 | 37.9 | [config](./fovea_r50_fpn_gn-head-align_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_4x4_2x_coco/fovea_align_r50_fpn_gn-head_4x4_2x_coco_20200203-8987880d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_4x4_2x_coco/fovea_align_r50_fpn_gn-head_4x4_2x_coco_20200203_134252.log.json) |
+| R-50 | pytorch | Y | Y | 2x | 8.1 | 18.3 | 40.4 | [config](./fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200205-85ce26cb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200205_112557.log.json) |
+| R-101 | pytorch | N | N | 1x | 9.2 | 17.4 | 38.6 | [config](./fovea_r101_fpn_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_1x_coco/fovea_r101_fpn_4x4_1x_coco_20200219-05e38f1c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_1x_coco/fovea_r101_fpn_4x4_1x_coco_20200219_011740.log.json) |
+| R-101 | pytorch | N | N | 2x | 11.7 | - | 40.0 | [config](./fovea_r101_fpn_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_2x_coco/fovea_r101_fpn_4x4_2x_coco_20200208-02320ea4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_2x_coco/fovea_r101_fpn_4x4_2x_coco_20200208_202059.log.json) |
+| R-101 | pytorch | Y | N | 2x | 11.7 | 14.7 | 40.0 | [config](./fovea_r101_fpn_gn-head-align_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_4x4_2x_coco/fovea_align_r101_fpn_gn-head_4x4_2x_coco_20200208-c39a027a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_4x4_2x_coco/fovea_align_r101_fpn_gn-head_4x4_2x_coco_20200208_203337.log.json) |
+| R-101 | pytorch | Y | Y | 2x | 11.7 | 14.7 | 42.0 | [config](./fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200208-649c5eb6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200208_202124.log.json) |
+
+\[1\] *1x and 2x mean the model is trained for 12 and 24 epochs, respectively.* \
+\[2\] *Align means utilizing deformable convolution to align the cls branch.* \
+\[3\] *All results are obtained with a single model and without any test time data augmentation.*\
+\[4\] *We use 4 GPUs for training.*
+
+Any pull requests or issues are welcome.
+
+## Citation
+
+Please consider citing our paper in your publications if the project helps your research. BibTeX reference is as follows.
+
+```latex
+@article{kong2019foveabox,
+ title={FoveaBox: Beyond Anchor-based Object Detector},
+ author={Kong, Tao and Sun, Fuchun and Liu, Huaping and Jiang, Yuning and Shi, Jianbo},
+ journal={arXiv preprint arXiv:1904.03797},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7e8ccf910e6317bf576463fa26bfcb330b6ff385
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0dc98515e62b2dba225e822850229f0a2f802d63
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_4xb4-2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './fovea_r50_fpn_4xb4-2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..222671d49d1e3fbc31285e4f13487d86642ebbe3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_4xb4-2x_coco.py
@@ -0,0 +1,23 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ with_deform=True,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e1852d581fcbdd9a1459291fc7f65e51041aa4e6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
@@ -0,0 +1,34 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ with_deform=True,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..13cf3ae92b0d2bfd1d84f032f7b202430f095a6a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-1x_coco.py
@@ -0,0 +1,59 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ type='FOVEA',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ num_outs=5,
+ add_extra_convs='on_input'),
+ bbox_head=dict(
+ type='FoveaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ base_edge_list=[16, 32, 64, 128, 256],
+ scale_ranges=((1, 64), (32, 128), (64, 256), (128, 512), (256, 2048)),
+ sigma=0.4,
+ with_deform=False,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=1.50,
+ alpha=0.4,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.11, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(),
+ test_cfg=dict(
+ nms_pre=1000,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100))
+train_dataloader = dict(batch_size=4, num_workers=4)
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f9d06ef9f9ba89f202ef13176af39df7e89cb5e6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_4xb4-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..877bb4fa4e1c03190a05da4e95558d8534e5e6e8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_4xb4-2x_coco.py
@@ -0,0 +1,20 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ with_deform=True,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5690bcae08cd0e639afe3c832a46f78036324c08
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
@@ -0,0 +1,30 @@
+_base_ = './fovea_r50_fpn_4xb4-1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ with_deform=True,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/foveabox/metafile.yml b/grounding-dino/mmdetection/configs/foveabox/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9ab2f5420323a9eb8c2ace386485c34277d53213
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/foveabox/metafile.yml
@@ -0,0 +1,172 @@
+Collections:
+ - Name: FoveaBox
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 4x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1904.03797
+ Title: 'FoveaBox: Beyond Anchor-based Object Detector'
+ README: configs/foveabox/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/fovea.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: fovea_r50_fpn_4xb4-1x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r50_fpn_4xb4-1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.6
+ inference time (ms/im):
+ - value: 41.49
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_1x_coco/fovea_r50_fpn_4x4_1x_coco_20200219-ee4d5303.pth
+
+ - Name: fovea_r50_fpn_4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r50_fpn_4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.6
+ inference time (ms/im):
+ - value: 41.49
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r50_fpn_4x4_2x_coco/fovea_r50_fpn_4x4_2x_coco_20200203-2df792b1.pth
+
+ - Name: fovea_r50_fpn_gn-head-align_4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r50_fpn_gn-head-align_4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 8.1
+ inference time (ms/im):
+ - value: 51.55
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_4x4_2x_coco/fovea_align_r50_fpn_gn-head_4x4_2x_coco_20200203-8987880d.pth
+
+ - Name: fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r50_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 8.1
+ inference time (ms/im):
+ - value: 54.64
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r50_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200205-85ce26cb.pth
+
+ - Name: fovea_r101_fpn_4xb4-1x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r101_fpn_4xb4-1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.2
+ inference time (ms/im):
+ - value: 57.47
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_1x_coco/fovea_r101_fpn_4x4_1x_coco_20200219-05e38f1c.pth
+
+ - Name: fovea_r101_fpn_4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r101_fpn_4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 11.7
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_r101_fpn_4x4_2x_coco/fovea_r101_fpn_4x4_2x_coco_20200208-02320ea4.pth
+
+ - Name: fovea_r101_fpn_gn-head-align_4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r101_fpn_gn-head-align_4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 11.7
+ inference time (ms/im):
+ - value: 68.03
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_4x4_2x_coco/fovea_align_r101_fpn_gn-head_4x4_2x_coco_20200208-c39a027a.pth
+
+ - Name: fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco
+ In Collection: FoveaBox
+ Config: configs/foveabox/fovea_r101_fpn_gn-head-align_ms-640-800-4xb4-2x_coco.py
+ Metadata:
+ Training Memory (GB): 11.7
+ inference time (ms/im):
+ - value: 68.03
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/foveabox/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco/fovea_align_r101_fpn_gn-head_mstrain_640-800_4x4_2x_coco_20200208-649c5eb6.pth
diff --git a/grounding-dino/mmdetection/configs/fpg/README.md b/grounding-dino/mmdetection/configs/fpg/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1e2fd400288d3ebd57741f1b1d18e430a8c62f41
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/README.md
@@ -0,0 +1,43 @@
+# FPG
+
+> [Feature Pyramid Grids](https://arxiv.org/abs/2004.03580)
+
+
+
+## Abstract
+
+Feature pyramid networks have been widely adopted in the object detection literature to improve feature representations for better handling of variations in scale. In this paper, we present Feature Pyramid Grids (FPG), a deep multi-pathway feature pyramid, that represents the feature scale-space as a regular grid of parallel bottom-up pathways which are fused by multi-directional lateral connections. FPG can improve single-pathway feature pyramid networks by significantly increasing its performance at similar computation cost, highlighting importance of deep pyramid representations. In addition to its general and uniform structure, over complicated structures that have been found with neural architecture search, it also compares favorably against such approaches without relying on search. We hope that FPG with its uniform and effective nature can serve as a strong component for future work in object recognition.
+
+
+
+ +
+
+
+## Results and Models
+
+We benchmark the new training schedule (crop training, large batch, unfrozen BN, 50 epochs) introduced in NAS-FPN.
+All backbones are Resnet-50 in pytorch style.
+
+| Method | Neck | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------: | :--------: | :-----: | :------: | :------------: | :----: | :-----: | :--------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | FPG | 50e | 20.0 | - | 42.3 | - | [config](./faster-rcnn_r50_fpg_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg_crop640_50e_coco/faster_rcnn_r50_fpg_crop640_50e_coco_20220311_011856-74109f42.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg_crop640_50e_coco/faster_rcnn_r50_fpg_crop640_50e_coco_20220311_011856.log.json) |
+| Faster R-CNN | FPG-chn128 | 50e | 11.9 | - | 41.2 | - | [config](./faster-rcnn_r50_fpg-chn128_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg-chn128_crop640_50e_coco/faster_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011857-9376aa9d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg-chn128_crop640_50e_coco/faster_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011857.log.json) |
+| Faster R-CNN | FPN | 50e | 20.0 | - | 38.9 | - | [config](./faster-rcnn_r50_fpn_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpn_crop640_50e_coco/faster_rcnn_r50_fpn_crop640_50e_coco_20220311_011857-be7c9f42.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpn_crop640_50e_coco/faster_rcnn_r50_fpn_crop640_50e_coco_20220311_011857.log.json) |
+| Mask R-CNN | FPG | 50e | 23.2 | - | 43.0 | 38.1 | [config](./mask-rcnn_r50_fpg_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg_crop640_50e_coco/mask_rcnn_r50_fpg_crop640_50e_coco_20220311_011857-233b8334.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg_crop640_50e_coco/mask_rcnn_r50_fpg_crop640_50e_coco_20220311_011857.log.json) |
+| Mask R-CNN | FPG-chn128 | 50e | 15.3 | - | 41.7 | 37.1 | [config](./mask-rcnn_r50_fpg-chn128_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg-chn128_crop640_50e_coco/mask_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011859-043c9b4e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg-chn128_crop640_50e_coco/mask_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011859.log.json) |
+| Mask R-CNN | FPN | 50e | 23.2 | - | 49.6 | 35.6 | [config](./mask-rcnn_r50_fpn_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpn_crop640_50e_coco/mask_rcnn_r50_fpn_crop640_50e_coco_20220311_011855-a756664a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpn_crop640_50e_coco/mask_rcnn_r50_fpn_crop640_50e_coco_20220311_011855.log.json) |
+| RetinaNet | FPG | 50e | 20.8 | - | 40.5 | - | [config](./retinanet_r50_fpg_crop640_50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg_crop640_50e_coco/retinanet_r50_fpg_crop640_50e_coco_20220311_110809-b0bcf5f4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg_crop640_50e_coco/retinanet_r50_fpg_crop640_50e_coco_20220311_110809.log.json) |
+| RetinaNet | FPG-chn128 | 50e | 19.9 | - | 39.9 | - | [config](./retinanet_r50_fpg-chn128_crop640_50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco/retinanet_r50_fpg-chn128_crop640_50e_coco_20220313_104829-ee99a686.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco/retinanet_r50_fpg-chn128_crop640_50e_coco_20220313_104829.log.json) |
+
+**Note**: Chn128 means to decrease the number of channels of features and convs from 256 (default) to 128 in
+Neck and BBox Head, which can greatly decrease memory consumption without sacrificing much precision.
+
+## Citation
+
+```latex
+@article{chen2020feature,
+ title={Feature pyramid grids},
+ author={Chen, Kai and Cao, Yuhang and Loy, Chen Change and Lin, Dahua and Feichtenhofer, Christoph},
+ journal={arXiv preprint arXiv:2004.03580},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg-chn128_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg-chn128_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cb9160f5cc7e118069d7172573018515aa406331
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg-chn128_crop640-50e_coco.py
@@ -0,0 +1,9 @@
+_base_ = 'faster-rcnn_r50_fpg_crop640-50e_coco.py'
+
+norm_cfg = dict(type='BN', requires_grad=True)
+model = dict(
+ neck=dict(out_channels=128, inter_channels=128),
+ rpn_head=dict(in_channels=128),
+ roi_head=dict(
+ bbox_roi_extractor=dict(out_channels=128),
+ bbox_head=dict(in_channels=128)))
diff --git a/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d0d366f1f30e5bcc6d52010c46d60183b56386ea
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpg_crop640-50e_coco.py
@@ -0,0 +1,48 @@
+_base_ = 'faster-rcnn_r50_fpn_crop640-50e_coco.py'
+
+norm_cfg = dict(type='BN', requires_grad=True)
+model = dict(
+ neck=dict(
+ type='FPG',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ inter_channels=256,
+ num_outs=5,
+ stack_times=9,
+ paths=['bu'] * 9,
+ same_down_trans=None,
+ same_up_trans=dict(
+ type='conv',
+ kernel_size=3,
+ stride=2,
+ padding=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_lateral_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_down_trans=dict(
+ type='interpolation_conv',
+ mode='nearest',
+ kernel_size=3,
+ norm_cfg=norm_cfg,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ across_up_trans=None,
+ across_skip_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ output_trans=dict(
+ type='last_conv',
+ kernel_size=3,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ norm_cfg=norm_cfg,
+ skip_inds=[(0, 1, 2, 3), (0, 1, 2), (0, 1), (0, ), ()]))
diff --git a/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpn_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpn_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..46211de03f34e6a9709a9cfa8561b88a90f69581
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/faster-rcnn_r50_fpn_crop640-50e_coco.py
@@ -0,0 +1,73 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+norm_cfg = dict(type='BN', requires_grad=True)
+image_size = (640, 640)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+model = dict(
+ data_preprocessor=dict(pad_size_divisor=64, batch_augments=batch_augments),
+ backbone=dict(norm_cfg=norm_cfg, norm_eval=False),
+ neck=dict(norm_cfg=norm_cfg),
+ roi_head=dict(bbox_head=dict(norm_cfg=norm_cfg)))
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=image_size,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=image_size,
+ allow_negative_crop=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=image_size, keep_ratio=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=8, num_workers=4, dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# learning policy
+max_epochs = 50
+train_cfg = dict(max_epochs=max_epochs, val_interval=2)
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[30, 40],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ paramwise_cfg=dict(norm_decay_mult=0, bypass_duplicate=True),
+ clip_grad=None)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg-chn128_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg-chn128_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..804393966c6711a1e5261ace00e9b8b84283fde5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg-chn128_crop640-50e_coco.py
@@ -0,0 +1,10 @@
+_base_ = 'mask-rcnn_r50_fpg_crop640-50e_coco.py'
+
+model = dict(
+ neck=dict(out_channels=128, inter_channels=128),
+ rpn_head=dict(in_channels=128),
+ roi_head=dict(
+ bbox_roi_extractor=dict(out_channels=128),
+ bbox_head=dict(in_channels=128),
+ mask_roi_extractor=dict(out_channels=128),
+ mask_head=dict(in_channels=128)))
diff --git a/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..135bb60bb340c40a47a9bd64e5a8afc57ede60db
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpg_crop640-50e_coco.py
@@ -0,0 +1,48 @@
+_base_ = 'mask-rcnn_r50_fpn_crop640-50e_coco.py'
+
+norm_cfg = dict(type='BN', requires_grad=True)
+model = dict(
+ neck=dict(
+ type='FPG',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ inter_channels=256,
+ num_outs=5,
+ stack_times=9,
+ paths=['bu'] * 9,
+ same_down_trans=None,
+ same_up_trans=dict(
+ type='conv',
+ kernel_size=3,
+ stride=2,
+ padding=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_lateral_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_down_trans=dict(
+ type='interpolation_conv',
+ mode='nearest',
+ kernel_size=3,
+ norm_cfg=norm_cfg,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ across_up_trans=None,
+ across_skip_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ output_trans=dict(
+ type='last_conv',
+ kernel_size=3,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ norm_cfg=norm_cfg,
+ skip_inds=[(0, 1, 2, 3), (0, 1, 2), (0, 1), (0, ), ()]))
diff --git a/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpn_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpn_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..08ca5b6ffd8b9d166857d3c27bb6f5bde91416cc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/mask-rcnn_r50_fpn_crop640-50e_coco.py
@@ -0,0 +1,79 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+norm_cfg = dict(type='BN', requires_grad=True)
+image_size = (640, 640)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+model = dict(
+ data_preprocessor=dict(pad_size_divisor=64, batch_augments=batch_augments),
+ backbone=dict(norm_cfg=norm_cfg, norm_eval=False),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ norm_cfg=norm_cfg,
+ num_outs=5),
+ roi_head=dict(
+ bbox_head=dict(norm_cfg=norm_cfg), mask_head=dict(norm_cfg=norm_cfg)))
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomResize',
+ scale=image_size,
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=image_size,
+ allow_negative_crop=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=image_size, keep_ratio=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=8, num_workers=4, dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# learning policy
+max_epochs = 50
+train_cfg = dict(max_epochs=max_epochs, val_interval=2)
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[30, 40],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ paramwise_cfg=dict(norm_decay_mult=0, bypass_duplicate=True),
+ clip_grad=None)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/fpg/metafile.yml b/grounding-dino/mmdetection/configs/fpg/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7d7634aec6161a283577059de96d5f995cf1e4bb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/metafile.yml
@@ -0,0 +1,104 @@
+Collections:
+ - Name: Feature Pyramid Grids
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Feature Pyramid Grids
+ Paper:
+ URL: https://arxiv.org/abs/2004.03580
+ Title: 'Feature Pyramid Grids'
+ README: configs/fpg/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.10.0/mmdet/models/necks/fpg.py#L101
+ Version: v2.10.0
+
+Models:
+ - Name: faster-rcnn_r50_fpg_crop640-50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/faster-rcnn_r50_fpg_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 20.0
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg_crop640_50e_coco/faster_rcnn_r50_fpg_crop640_50e_coco_20220311_011856-74109f42.pth
+
+ - Name: faster-rcnn_r50_fpg-chn128_crop640-50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/faster-rcnn_r50_fpg-chn128_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 11.9
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/faster_rcnn_r50_fpg-chn128_crop640_50e_coco/faster_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011857-9376aa9d.pth
+
+ - Name: mask-rcnn_r50_fpg_crop640-50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/mask-rcnn_r50_fpg_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 23.2
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg_crop640_50e_coco/mask_rcnn_r50_fpg_crop640_50e_coco_20220311_011857-233b8334.pth
+
+ - Name: mask-rcnn_r50_fpg-chn128_crop640-50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/mask-rcnn_r50_fpg-chn128_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 15.3
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/mask_rcnn_r50_fpg-chn128_crop640_50e_coco/mask_rcnn_r50_fpg-chn128_crop640_50e_coco_20220311_011859-043c9b4e.pth
+
+ - Name: retinanet_r50_fpg_crop640_50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/retinanet_r50_fpg_crop640_50e_coco.py
+ Metadata:
+ Training Memory (GB): 20.8
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg_crop640_50e_coco/retinanet_r50_fpg_crop640_50e_coco_20220311_110809-b0bcf5f4.pth
+
+ - Name: retinanet_r50_fpg-chn128_crop640_50e_coco
+ In Collection: Feature Pyramid Grids
+ Config: configs/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco.py
+ Metadata:
+ Training Memory (GB): 19.9
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco/retinanet_r50_fpg-chn128_crop640_50e_coco_20220313_104829-ee99a686.pth
diff --git a/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco.py b/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9a6cf7e56a4f23a42d3905560a9b8035d6d935ff
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg-chn128_crop640_50e_coco.py
@@ -0,0 +1,5 @@
+_base_ = 'retinanet_r50_fpg_crop640_50e_coco.py'
+
+model = dict(
+ neck=dict(out_channels=128, inter_channels=128),
+ bbox_head=dict(in_channels=128))
diff --git a/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg_crop640_50e_coco.py b/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg_crop640_50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e2aac283992ea9e4595e7594233b21208bd672f5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fpg/retinanet_r50_fpg_crop640_50e_coco.py
@@ -0,0 +1,53 @@
+_base_ = '../nas_fpn/retinanet_r50_nasfpn_crop640-50e_coco.py'
+
+norm_cfg = dict(type='BN', requires_grad=True)
+model = dict(
+ neck=dict(
+ _delete_=True,
+ type='FPG',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ inter_channels=256,
+ num_outs=5,
+ add_extra_convs=True,
+ start_level=1,
+ stack_times=9,
+ paths=['bu'] * 9,
+ same_down_trans=None,
+ same_up_trans=dict(
+ type='conv',
+ kernel_size=3,
+ stride=2,
+ padding=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_lateral_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ across_down_trans=dict(
+ type='interpolation_conv',
+ mode='nearest',
+ kernel_size=3,
+ norm_cfg=norm_cfg,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ across_up_trans=None,
+ across_skip_trans=dict(
+ type='conv',
+ kernel_size=1,
+ norm_cfg=norm_cfg,
+ inplace=False,
+ order=('act', 'conv', 'norm')),
+ output_trans=dict(
+ type='last_conv',
+ kernel_size=3,
+ order=('act', 'conv', 'norm'),
+ inplace=False),
+ norm_cfg=norm_cfg,
+ skip_inds=[(0, 1, 2, 3), (0, 1, 2), (0, 1), (0, ), ()]))
+
+train_cfg = dict(val_interval=2)
diff --git a/grounding-dino/mmdetection/configs/free_anchor/README.md b/grounding-dino/mmdetection/configs/free_anchor/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..03dc828319fcfd5368361af8b64de1018a54f638
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/free_anchor/README.md
@@ -0,0 +1,37 @@
+# FreeAnchor
+
+> [FreeAnchor: Learning to Match Anchors for Visual Object Detection](https://arxiv.org/abs/1909.02466)
+
+
+
+## Abstract
+
+Modern CNN-based object detectors assign anchors for ground-truth objects under the restriction of object-anchor Intersection-over-Unit (IoU). In this study, we propose a learning-to-match approach to break IoU restriction, allowing objects to match anchors in a flexible manner. Our approach, referred to as FreeAnchor, updates hand-crafted anchor assignment to "free" anchor matching by formulating detector training as a maximum likelihood estimation (MLE) procedure. FreeAnchor targets at learning features which best explain a class of objects in terms of both classification and localization. FreeAnchor is implemented by optimizing detection customized likelihood and can be fused with CNN-based detectors in a plug-and-play manner. Experiments on COCO demonstrate that FreeAnchor consistently outperforms their counterparts with significant margins.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :---------: | :-----: | :-----: | :------: | :------------: | :----: | :----------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | 1x | 4.9 | 18.4 | 38.7 | [config](./freeanchor_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r50_fpn_1x_coco/retinanet_free_anchor_r50_fpn_1x_coco_20200130-0f67375f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r50_fpn_1x_coco/retinanet_free_anchor_r50_fpn_1x_coco_20200130_095625.log.json) |
+| R-101 | pytorch | 1x | 6.8 | 14.9 | 40.3 | [config](./freeanchor_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r101_fpn_1x_coco/retinanet_free_anchor_r101_fpn_1x_coco_20200130-358324e6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r101_fpn_1x_coco/retinanet_free_anchor_r101_fpn_1x_coco_20200130_100723.log.json) |
+| X-101-32x4d | pytorch | 1x | 8.1 | 11.1 | 41.9 | [config](./freeanchor_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_x101_32x4d_fpn_1x_coco/retinanet_free_anchor_x101_32x4d_fpn_1x_coco_20200130-d4846968.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_x101_32x4d_fpn_1x_coco/retinanet_free_anchor_x101_32x4d_fpn_1x_coco_20200130_095627.log.json) |
+
+**Notes:**
+
+- We use 8 GPUs with 2 images/GPU.
+- For more settings and models, please refer to the [official repo](https://github.com/zhangxiaosong18/FreeAnchor).
+
+## Citation
+
+```latex
+@inproceedings{zhang2019freeanchor,
+ title = {{FreeAnchor}: Learning to Match Anchors for Visual Object Detection},
+ author = {Zhang, Xiaosong and Wan, Fang and Liu, Chang and Ji, Rongrong and Ye, Qixiang},
+ booktitle = {Neural Information Processing Systems},
+ year = {2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dc323d94f7aa20b38e2204a38ed8e234dd4eadd1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './freeanchor_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..13f64d14a1ead0431549b8569d031f72669a2e84
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_r50_fpn_1x_coco.py
@@ -0,0 +1,22 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='FreeAnchorRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.11, loss_weight=0.75)))
+
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/free_anchor/freeanchor_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8e448bc1123115d37ef9f21a33c8a6b38cd821c3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/free_anchor/freeanchor_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './freeanchor_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/free_anchor/metafile.yml b/grounding-dino/mmdetection/configs/free_anchor/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cff19db6c957c2cdc09c1f76ff230c3a611bfc01
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/free_anchor/metafile.yml
@@ -0,0 +1,79 @@
+Collections:
+ - Name: FreeAnchor
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FreeAnchor
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1909.02466
+ Title: 'FreeAnchor: Learning to Match Anchors for Visual Object Detection'
+ README: configs/free_anchor/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/dense_heads/free_anchor_retina_head.py#L10
+ Version: v2.0.0
+
+Models:
+ - Name: freeanchor_r50_fpn_1x_coco
+ In Collection: FreeAnchor
+ Config: configs/free_anchor/freeanchor_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.9
+ inference time (ms/im):
+ - value: 54.35
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r50_fpn_1x_coco/retinanet_free_anchor_r50_fpn_1x_coco_20200130-0f67375f.pth
+
+ - Name: freeanchor_r101_fpn_1x_coco
+ In Collection: FreeAnchor
+ Config: configs/free_anchor/freeanchor_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.8
+ inference time (ms/im):
+ - value: 67.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_r101_fpn_1x_coco/retinanet_free_anchor_r101_fpn_1x_coco_20200130-358324e6.pth
+
+ - Name: freeanchor_x101-32x4d_fpn_1x_coco
+ In Collection: FreeAnchor
+ Config: configs/free_anchor/freeanchor_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.1
+ inference time (ms/im):
+ - value: 90.09
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/free_anchor/retinanet_free_anchor_x101_32x4d_fpn_1x_coco/retinanet_free_anchor_x101_32x4d_fpn_1x_coco_20200130-d4846968.pth
diff --git a/grounding-dino/mmdetection/configs/fsaf/README.md b/grounding-dino/mmdetection/configs/fsaf/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..46f60577728d3e9d8785f19d8cda34991bae06d3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fsaf/README.md
@@ -0,0 +1,57 @@
+# FSAF
+
+> [Feature Selective Anchor-Free Module for Single-Shot Object Detection](https://arxiv.org/abs/1903.00621)
+
+
+
+## Abstract
+
+We motivate and present feature selective anchor-free (FSAF) module, a simple and effective building block for single-shot object detectors. It can be plugged into single-shot detectors with feature pyramid structure. The FSAF module addresses two limitations brought up by the conventional anchor-based detection: 1) heuristic-guided feature selection; 2) overlap-based anchor sampling. The general concept of the FSAF module is online feature selection applied to the training of multi-level anchor-free branches. Specifically, an anchor-free branch is attached to each level of the feature pyramid, allowing box encoding and decoding in the anchor-free manner at an arbitrary level. During training, we dynamically assign each instance to the most suitable feature level. At the time of inference, the FSAF module can work jointly with anchor-based branches by outputting predictions in parallel. We instantiate this concept with simple implementations of anchor-free branches and online feature selection strategy. Experimental results on the COCO detection track show that our FSAF module performs better than anchor-based counterparts while being faster. When working jointly with anchor-based branches, the FSAF module robustly improves the baseline RetinaNet by a large margin under various settings, while introducing nearly free inference overhead. And the resulting best model can achieve a state-of-the-art 44.6% mAP, outperforming all existing single-shot detectors on COCO.
+
+
+
+ +
+
+
+## Introduction
+
+FSAF is an anchor-free method published in CVPR2019 ([https://arxiv.org/pdf/1903.00621.pdf](https://arxiv.org/pdf/1903.00621.pdf)).
+Actually it is equivalent to the anchor-based method with only one anchor at each feature map position in each FPN level.
+And this is how we implemented it.
+Only the anchor-free branch is released for its better compatibility with the current framework and less computational budget.
+
+In the original paper, feature maps within the central 0.2-0.5 area of a gt box are tagged as ignored. However,
+it is empirically found that a hard threshold (0.2-0.2) gives a further gain on the performance. (see the table below)
+
+## Results and Models
+
+### Results on R50/R101/X101-FPN
+
+| Backbone | ignore range | ms-train | Lr schd | Train Mem (GB) | Train time (s/iter) | Inf time (fps) | box AP | Config | Download |
+| :------: | :----------: | :------: | :-----: | :------------: | :-----------------: | :------------: | :---------: | :----------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | 0.2-0.5 | N | 1x | 3.15 | 0.43 | 12.3 | 36.0 (35.9) | | [model](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_pscale0.2_nscale0.5_r50_fpn_1x_coco/fsaf_pscale0.2_nscale0.5_r50_fpn_1x_coco_20200715-b555b0e0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_pscale0.2_nscale0.5_r50_fpn_1x_coco/fsaf_pscale0.2_nscale0.5_r50_fpn_1x_coco_20200715_094657.log.json) |
+| R-50 | 0.2-0.2 | N | 1x | 3.15 | 0.43 | 13.0 | 37.4 | [config](./fsaf_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r50_fpn_1x_coco/fsaf_r50_fpn_1x_coco-94ccc51f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r50_fpn_1x_coco/fsaf_r50_fpn_1x_coco_20200428_072327.log.json) |
+| R-101 | 0.2-0.2 | N | 1x | 5.08 | 0.58 | 10.8 | 39.3 (37.9) | [config](./fsaf_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r101_fpn_1x_coco/fsaf_r101_fpn_1x_coco-9e71098f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r101_fpn_1x_coco/fsaf_r101_fpn_1x_coco_20200428_160348.log.json) |
+| X-101 | 0.2-0.2 | N | 1x | 9.38 | 1.23 | 5.6 | 42.4 (41.0) | [config](./fsaf_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_x101_64x4d_fpn_1x_coco/fsaf_x101_64x4d_fpn_1x_coco-e3f6e6fd.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_x101_64x4d_fpn_1x_coco/fsaf_x101_64x4d_fpn_1x_coco_20200428_160424.log.json) |
+
+**Notes:**
+
+- *1x means the model is trained for 12 epochs.*
+- *AP values in the brackets represent those reported in the original paper.*
+- *All results are obtained with a single model and single-scale test.*
+- *X-101 backbone represents ResNext-101-64x4d.*
+- *All pretrained backbones use pytorch style.*
+- *All models are trained on 8 Titan-XP gpus and tested on a single gpu.*
+
+## Citation
+
+BibTeX reference is as follows.
+
+```latex
+@inproceedings{zhu2019feature,
+ title={Feature Selective Anchor-Free Module for Single-Shot Object Detection},
+ author={Zhu, Chenchen and He, Yihui and Savvides, Marios},
+ booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
+ pages={840--849},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/fsaf/fsaf_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fsaf/fsaf_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..12b49fed5b6cd617aa9c05d76ed737d755992a34
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fsaf/fsaf_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './fsaf_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/fsaf/fsaf_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fsaf/fsaf_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e7165cd63c74ab27ff47f8255836f4c10158cf0e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fsaf/fsaf_r50_fpn_1x_coco.py
@@ -0,0 +1,47 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ type='FSAF',
+ bbox_head=dict(
+ type='FSAFHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ reg_decoded_bbox=True,
+ # Only anchor-free branch is implemented. The anchor generator only
+ # generates 1 anchor at each feature point, as a substitute of the
+ # grid of features.
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=1,
+ scales_per_octave=1,
+ ratios=[1.0],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(_delete_=True, type='TBLRBBoxCoder', normalizer=4.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0,
+ reduction='none'),
+ loss_bbox=dict(
+ _delete_=True,
+ type='IoULoss',
+ eps=1e-6,
+ loss_weight=1.0,
+ reduction='none')),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ _delete_=True,
+ type='CenterRegionAssigner',
+ pos_scale=0.2,
+ neg_scale=0.2,
+ min_pos_iof=0.01),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+
+optim_wrapper = dict(clip_grad=dict(max_norm=10, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/fsaf/fsaf_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/fsaf/fsaf_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..89c0c6344aba6e6eae5657eff60745645dd1e8dc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fsaf/fsaf_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './fsaf_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/fsaf/metafile.yml b/grounding-dino/mmdetection/configs/fsaf/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..daaad0d3a864b52df618a95a63c6caeaa1fd76ec
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/fsaf/metafile.yml
@@ -0,0 +1,80 @@
+Collections:
+ - Name: FSAF
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x Titan-XP GPUs
+ Architecture:
+ - FPN
+ - FSAF
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1903.00621
+ Title: 'Feature Selective Anchor-Free Module for Single-Shot Object Detection'
+ README: configs/fsaf/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/detectors/fsaf.py#L6
+ Version: v2.1.0
+
+Models:
+ - Name: fsaf_r50_fpn_1x_coco
+ In Collection: FSAF
+ Config: configs/fsaf/fsaf_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.15
+ inference time (ms/im):
+ - value: 76.92
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r50_fpn_1x_coco/fsaf_r50_fpn_1x_coco-94ccc51f.pth
+
+ - Name: fsaf_r101_fpn_1x_coco
+ In Collection: FSAF
+ Config: configs/fsaf/fsaf_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.08
+ inference time (ms/im):
+ - value: 92.59
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_r101_fpn_1x_coco/fsaf_r101_fpn_1x_coco-9e71098f.pth
+
+ - Name: fsaf_x101-64x4d_fpn_1x_coco
+ In Collection: FSAF
+ Config: configs/fsaf/fsaf_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.38
+ inference time (ms/im):
+ - value: 178.57
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fsaf/fsaf_x101_64x4d_fpn_1x_coco/fsaf_x101_64x4d_fpn_1x_coco-e3f6e6fd.pth
diff --git a/grounding-dino/mmdetection/configs/gcnet/README.md b/grounding-dino/mmdetection/configs/gcnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1ba6f6f3e4e23d4f68bca2545bba733352d0c498
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/README.md
@@ -0,0 +1,69 @@
+# GCNet
+
+> [GCNet: Non-local Networks Meet Squeeze-Excitation Networks and Beyond](https://arxiv.org/abs/1904.11492)
+
+
+
+## Abstract
+
+The Non-Local Network (NLNet) presents a pioneering approach for capturing long-range dependencies, via aggregating query-specific global context to each query position. However, through a rigorous empirical analysis, we have found that the global contexts modeled by non-local network are almost the same for different query positions within an image. In this paper, we take advantage of this finding to create a simplified network based on a query-independent formulation, which maintains the accuracy of NLNet but with significantly less computation. We further observe that this simplified design shares similar structure with Squeeze-Excitation Network (SENet). Hence we unify them into a three-step general framework for global context modeling. Within the general framework, we design a better instantiation, called the global context (GC) block, which is lightweight and can effectively model the global context. The lightweight property allows us to apply it for multiple layers in a backbone network to construct a global context network (GCNet), which generally outperforms both simplified NLNet and SENet on major benchmarks for various recognition tasks.
+
+
+
+ +
+
+
+## Introduction
+
+By [Yue Cao](http://yue-cao.me), [Jiarui Xu](http://jerryxu.net), [Stephen Lin](https://scholar.google.com/citations?user=c3PYmxUAAAAJ&hl=en), Fangyun Wei, [Han Hu](https://sites.google.com/site/hanhushomepage/).
+
+We provide config files to reproduce the results in the paper for
+["GCNet: Non-local Networks Meet Squeeze-Excitation Networks and Beyond"](https://arxiv.org/abs/1904.11492) on COCO object detection.
+
+**GCNet** is initially described in [arxiv](https://arxiv.org/abs/1904.11492). Via absorbing advantages of Non-Local Networks (NLNet) and Squeeze-Excitation Networks (SENet), GCNet provides a simple, fast and effective approach for global context modeling, which generally outperforms both NLNet and SENet on major benchmarks for various recognition tasks.
+
+## Results and Models
+
+The results on COCO 2017val are shown in the below table.
+
+| Backbone | Model | Context | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :---: | :------------: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | Mask | GC(c3-c5, r16) | 1x | 5.0 | | 39.7 | 35.9 | [config](./mask-rcnn_r50-gcb-r16-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco_20200515_211915-187da160.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco_20200515_211915.log.json) |
+| R-50-FPN | Mask | GC(c3-c5, r4) | 1x | 5.1 | 15.0 | 39.9 | 36.0 | [config](./mask-rcnn_r50-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco_20200204-17235656.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco_20200204_024626.log.json) |
+| R-101-FPN | Mask | GC(c3-c5, r16) | 1x | 7.6 | 11.4 | 41.3 | 37.2 | [config](./mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco_20200205-e58ae947.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco_20200205_192835.log.json) |
+| R-101-FPN | Mask | GC(c3-c5, r4) | 1x | 7.8 | 11.6 | 42.2 | 37.8 | [config](./mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco_20200206-af22dc9d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco_20200206_112128.log.json) |
+
+| Backbone | Model | Context | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :--------------: | :------------: | :-----: | :------: | :------------: | :----: | :-----: | :--------------------------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | Mask | - | 1x | 4.4 | 16.6 | 38.4 | 34.6 | [config](./mask-rcnn_r50-syncbn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco_20200202-bb3eb55c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco_20200202_214122.log.json) |
+| R-50-FPN | Mask | GC(c3-c5, r16) | 1x | 5.0 | 15.5 | 40.4 | 36.2 | [config](./mask-rcnn_r50-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200202-587b99aa.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200202_174907.log.json) |
+| R-50-FPN | Mask | GC(c3-c5, r4) | 1x | 5.1 | 15.1 | 40.7 | 36.5 | [config](./mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200202-50b90e5c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200202_085547.log.json) |
+| R-101-FPN | Mask | - | 1x | 6.4 | 13.3 | 40.5 | 36.3 | [config](./mask-rcnn_r101-syncbn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco_20200210-81658c8a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco_20200210_220422.log.json) |
+| R-101-FPN | Mask | GC(c3-c5, r16) | 1x | 7.6 | 12.0 | 42.2 | 37.8 | [config](./mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200207-945e77ca.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200207_015330.log.json) |
+| R-101-FPN | Mask | GC(c3-c5, r4) | 1x | 7.8 | 11.8 | 42.2 | 37.8 | [config](./mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200206-8407a3f0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200206_142508.log.json) |
+| X-101-FPN | Mask | - | 1x | 7.6 | 11.3 | 42.4 | 37.7 | [config](./mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200211-7584841c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200211_054326.log.json) |
+| X-101-FPN | Mask | GC(c3-c5, r16) | 1x | 8.8 | 9.8 | 43.5 | 38.6 | [config](./mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211-cbed3d2c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211_164715.log.json) |
+| X-101-FPN | Mask | GC(c3-c5, r4) | 1x | 9.0 | 9.7 | 43.9 | 39.0 | [config](./mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200212-68164964.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200212_070942.log.json) |
+| X-101-FPN | Cascade Mask | - | 1x | 9.2 | 8.4 | 44.7 | 38.6 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200310-d5ad2a5e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200310_115217.log.json) |
+| X-101-FPN | Cascade Mask | GC(c3-c5, r16) | 1x | 10.3 | 7.7 | 46.2 | 39.7 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211-10bf2463.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211_184154.log.json) |
+| X-101-FPN | Cascade Mask | GC(c3-c5, r4) | 1x | 10.6 | | 46.4 | 40.1 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200703_180653-ed035291.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200703_180653.log.json) |
+| X-101-FPN | DCN Cascade Mask | - | 1x | | | 47.5 | 40.9 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco_20210615_211019-abbc39ea.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco_20210615_211019.log.json) |
+| X-101-FPN | DCN Cascade Mask | GC(c3-c5, r16) | 1x | | | 48.0 | 41.3 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco_20210615_215648-44aa598a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco_20210615_215648.log.json) |
+| X-101-FPN | DCN Cascade Mask | GC(c3-c5, r4) | 1x | | | 47.9 | 41.1 | [config](./cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco_20210615_161851-720338ec.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco_20210615_161851.log.json) |
+
+**Notes:**
+
+- The `SyncBN` is added in the backbone for all models in **Table 2**.
+- `GC` denotes Global Context (GC) block is inserted after 1x1 conv of backbone.
+- `DCN` denotes replace 3x3 conv with 3x3 Deformable Convolution in `c3-c5` stages of backbone.
+- `r4` and `r16` denote ratio 4 and ratio 16 in GC block respectively.
+
+## Citation
+
+```latex
+@article{cao2019GCNet,
+ title={GCNet: Non-local Networks Meet Squeeze-Excitation Networks and Beyond},
+ author={Cao, Yue and Xu, Jiarui and Lin, Stephen and Wei, Fangyun and Hu, Han},
+ journal={arXiv preprint arXiv:1904.11492},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6cf605b666e460aee48adc629b0604af4c64e306
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../dcn/cascade-mask-rcnn_x101-32x4d-dconv-c3-c5_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..95fc687b664b25b754d4ba890ae9c9e982db65fb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../dcn/cascade-mask-rcnn_x101-32x4d-dconv-c3-c5_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9b77dc9315f52f9437eb1e39f6d518f1afaa41bb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = '../dcn/cascade-mask-rcnn_x101-32x4d-dconv-c3-c5_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True), norm_eval=False))
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8f97972aa2b7d151d5824de40da9cedae9c57535
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8404cfdaf34e470d2bff57a707ca8183fe442131
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..87667dee779ee8068075be17638a6d10a9985c7e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True), norm_eval=False))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..447e2c6d858738db0f0d2e46e57e1fccd2233af3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9c723a64b6f686b9dd0f8e7648c7b1b303205168
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6f9d03d3f8d94116b4814825ad8377b534a912b1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d07cb0d488c0df76a137bad54123a7583c7da87b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..957bdf55470017d9ac9fa482b416c2206266af86
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r101-syncbn_fpn_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = '../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True), norm_eval=False))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r16-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r16-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c9ec5ac3baf7c46ea95d4c3fcf4f5da4ad7a3dce
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r16-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r4-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r4-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..42474d5196a8a130999db735989b423664486304
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-gcb-r4-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ac1928082405baebfe5ec483f37b9775da21d5ad
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ae29f0cebe4f9fe16f2fea3de53874914186da9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f8ef27bad9743cba8f7134f1a77a091af1bca093
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_r50-syncbn_fpn_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True), norm_eval=False))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1a2e2c9f26b25c5aefba912997cd01db60854a5e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 16),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..65d3f9aadf5f79a4fb9fc9082dfabfdb3de08871
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = '../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ plugins=[
+ dict(
+ cfg=dict(type='ContextBlock', ratio=1. / 4),
+ stages=(False, True, True, True),
+ position='after_conv3')
+ ]))
diff --git a/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b5343a6d4596eb82245ef078d36a5a6ce5137aeb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = '../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ norm_cfg=dict(type='SyncBN', requires_grad=True), norm_eval=False))
diff --git a/grounding-dino/mmdetection/configs/gcnet/metafile.yml b/grounding-dino/mmdetection/configs/gcnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..075a94c8fbf4c5f629d9343cc841f94f18472195
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gcnet/metafile.yml
@@ -0,0 +1,440 @@
+Collections:
+ - Name: GCNet
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Global Context Block
+ - FPN
+ - RPN
+ - ResNet
+ - ResNeXt
+ Paper:
+ URL: https://arxiv.org/abs/1904.11492
+ Title: 'GCNet: Non-local Networks Meet Squeeze-Excitation Networks and Beyond'
+ README: configs/gcnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/ops/context_block.py#L13
+ Version: v2.0.0
+
+Models:
+ - Name: mask-rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r50-gcb-r16-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 35.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r16_gcb_c3-c5_1x_coco_20200515_211915-187da160.pth
+
+ - Name: mask-rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r50-gcb-r4-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ inference time (ms/im):
+ - value: 66.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_r4_gcb_c3-c5_1x_coco_20200204-17235656.pth
+
+ - Name: mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r101-gcb-r16-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ inference time (ms/im):
+ - value: 87.72
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r16_gcb_c3-c5_1x_coco_20200205-e58ae947.pth
+
+ - Name: mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r101-gcb-r4-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.8
+ inference time (ms/im):
+ - value: 86.21
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_r4_gcb_c3-c5_1x_coco_20200206-af22dc9d.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-backbone_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r50-syncbn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.4
+ inference time (ms/im):
+ - value: 60.24
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_1x_coco_20200202-bb3eb55c.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r50-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ inference time (ms/im):
+ - value: 64.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200202-587b99aa.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ inference time (ms/im):
+ - value: 66.23
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200202-50b90e5c.pth
+
+ - Name: mask-rcnn_r101-syncbn_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r101-syncbn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ inference time (ms/im):
+ - value: 75.19
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_1x_coco_20200210-81658c8a.pth
+
+ - Name: mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r101-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ inference time (ms/im):
+ - value: 83.33
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200207-945e77ca.pth
+
+ - Name: mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.8
+ inference time (ms/im):
+ - value: 84.75
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200206-8407a3f0.pth
+
+ - Name: mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ inference time (ms/im):
+ - value: 88.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200211-7584841c.pth
+
+ - Name: mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r16-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.8
+ inference time (ms/im):
+ - value: 102.04
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211-cbed3d2c.pth
+
+ - Name: mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/mask-rcnn_x101-32x4d-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.0
+ inference time (ms/im):
+ - value: 103.09
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200212-68164964.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.2
+ inference time (ms/im):
+ - value: 119.05
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_1x_coco_20200310-d5ad2a5e.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r16-gcb-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ inference time (ms/im):
+ - value: 129.87
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r16_gcb_c3-c5_1x_coco_20200211-10bf2463.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-r4-gcb-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200703_180653-ed035291.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_1x_coco_20210615_211019-abbc39ea.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r16-gcb-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r16_gcb_c3-c5_1x_coco_20210615_215648-44aa598a.pth
+
+ - Name: cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco
+ In Collection: GCNet
+ Config: configs/gcnet/cascade-mask-rcnn_x101-32x4d-syncbn-dconv-c3-c5-r4-gcb-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gcnet/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco/cascade_mask_rcnn_x101_32x4d_fpn_syncbn-backbone_dconv_c3-c5_r4_gcb_c3-c5_1x_coco_20210615_161851-720338ec.pth
diff --git a/grounding-dino/mmdetection/configs/gfl/README.md b/grounding-dino/mmdetection/configs/gfl/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..123f303ab422032aa2bbd2900a7c690d1a496eef
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/README.md
@@ -0,0 +1,42 @@
+# GFL
+
+> [Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection](https://arxiv.org/abs/2006.04388)
+
+
+
+## Abstract
+
+One-stage detector basically formulates object detection as dense classification and localization. The classification is usually optimized by Focal Loss and the box location is commonly learned under Dirac delta distribution. A recent trend for one-stage detectors is to introduce an individual prediction branch to estimate the quality of localization, where the predicted quality facilitates the classification to improve detection performance. This paper delves into the representations of the above three fundamental elements: quality estimation, classification and localization. Two problems are discovered in existing practices, including (1) the inconsistent usage of the quality estimation and classification between training and inference and (2) the inflexible Dirac delta distribution for localization when there is ambiguity and uncertainty in complex scenes. To address the problems, we design new representations for these elements. Specifically, we merge the quality estimation into the class prediction vector to form a joint representation of localization quality and classification, and use a vector to represent arbitrary distribution of box locations. The improved representations eliminate the inconsistency risk and accurately depict the flexible distribution in real data, but contain continuous labels, which is beyond the scope of Focal Loss. We then propose Generalized Focal Loss (GFL) that generalizes Focal Loss from its discrete form to the continuous version for successful optimization. On COCO test-dev, GFL achieves 45.0% AP using ResNet-101 backbone, surpassing state-of-the-art SAPD (43.5%) and ATSS (43.6%) with higher or comparable inference speed, under the same backbone and training settings. Notably, our best model can achieve a single-model single-scale AP of 48.2%, at 10 FPS on a single 2080Ti GPU.
+
+
+
+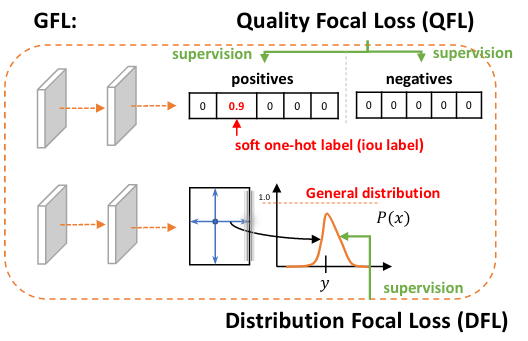 +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Multi-scale Training | Inf time (fps) | box AP | Config | Download |
+| :---------------: | :-----: | :-----: | :------------------: | :------------: | :----: | :------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | 1x | No | 19.5 | 40.2 | [config](./gfl_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_1x_coco/gfl_r50_fpn_1x_coco_20200629_121244-25944287.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_1x_coco/gfl_r50_fpn_1x_coco_20200629_121244.log.json) |
+| R-50 | pytorch | 2x | Yes | 19.5 | 42.9 | [config](./gfl_r50_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_mstrain_2x_coco/gfl_r50_fpn_mstrain_2x_coco_20200629_213802-37bb1edc.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_mstrain_2x_coco/gfl_r50_fpn_mstrain_2x_coco_20200629_213802.log.json) |
+| R-101 | pytorch | 2x | Yes | 14.7 | 44.7 | [config](./gfl_r101_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_mstrain_2x_coco/gfl_r101_fpn_mstrain_2x_coco_20200629_200126-dd12f847.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_mstrain_2x_coco/gfl_r101_fpn_mstrain_2x_coco_20200629_200126.log.json) |
+| R-101-dcnv2 | pytorch | 2x | Yes | 12.9 | 47.1 | [config](./gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco_20200630_102002-134b07df.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco_20200630_102002.log.json) |
+| X-101-32x4d | pytorch | 2x | Yes | 12.1 | 45.9 | [config](./gfl_x101-32x4d_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_mstrain_2x_coco/gfl_x101_32x4d_fpn_mstrain_2x_coco_20200630_102002-50c1ffdb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_mstrain_2x_coco/gfl_x101_32x4d_fpn_mstrain_2x_coco_20200630_102002.log.json) |
+| X-101-32x4d-dcnv2 | pytorch | 2x | Yes | 10.7 | 48.1 | [config](./gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco_20200630_102002-14a2bf25.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco_20200630_102002.log.json) |
+
+\[1\] *1x and 2x mean the model is trained for 90K and 180K iterations, respectively.* \
+\[2\] *All results are obtained with a single model and without any test time data augmentation such as multi-scale, flipping and etc..* \
+\[3\] *`dcnv2` denotes deformable convolutional networks v2.* \
+\[4\] *FPS is tested with a single GeForce RTX 2080Ti GPU, using a batch size of 1.*
+
+## Citation
+
+We provide config files to reproduce the object detection results in the paper [Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection](https://arxiv.org/abs/2006.04388)
+
+```latex
+@article{li2020generalized,
+ title={Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection},
+ author={Li, Xiang and Wang, Wenhai and Wu, Lijun and Chen, Shuo and Hu, Xiaolin and Li, Jun and Tang, Jinhui and Yang, Jian},
+ journal={arXiv preprint arXiv:2006.04388},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7f748935b62884fd501af7e6731ad3ef6ce0effb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './gfl_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_r101_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_r101_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..10135f161b9e933612d961af12a8e30198cca484
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_r101_fpn_ms-2x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './gfl_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..902382552d58f124bbe2b8c2904ce74ec7b7a4d8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_1x_coco.py
@@ -0,0 +1,66 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='GFL',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='GFLHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ loss_cls=dict(
+ type='QualityFocalLoss',
+ use_sigmoid=True,
+ beta=2.0,
+ loss_weight=1.0),
+ loss_dfl=dict(type='DistributionFocalLoss', loss_weight=0.25),
+ reg_max=16,
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..22770eb101920f9daae750a1b72f5410be395743
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_r50_fpn_ms-2x_coco.py
@@ -0,0 +1,28 @@
+_base_ = './gfl_r50_fpn_1x_coco.py'
+max_epochs = 24
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+
+# multi-scale training
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6aa98eea2d0d25b4df1570aed97cce8475e9104d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './gfl_r50_fpn_ms-2x_coco.py'
+model = dict(
+ type='GFL',
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, False, True, True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ec629b1f0d5d3317dcb20f1244bc713818518d8a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/gfl_x101-32x4d_fpn_ms-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './gfl_r50_fpn_ms-2x_coco.py'
+model = dict(
+ type='GFL',
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/gfl/metafile.yml b/grounding-dino/mmdetection/configs/gfl/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..183fc14bdee0492c7ea3fc18ccb7371682dc0066
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gfl/metafile.yml
@@ -0,0 +1,134 @@
+Collections:
+ - Name: Generalized Focal Loss
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Generalized Focal Loss
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2006.04388
+ Title: 'Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection'
+ README: configs/gfl/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.2.0/mmdet/models/detectors/gfl.py#L6
+ Version: v2.2.0
+
+Models:
+ - Name: gfl_r50_fpn_1x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_r50_fpn_1x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 51.28
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_1x_coco/gfl_r50_fpn_1x_coco_20200629_121244-25944287.pth
+
+ - Name: gfl_r50_fpn_ms-2x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_r50_fpn_ms-2x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 51.28
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r50_fpn_mstrain_2x_coco/gfl_r50_fpn_mstrain_2x_coco_20200629_213802-37bb1edc.pth
+
+ - Name: gfl_r101_fpn_ms-2x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_r101_fpn_ms-2x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 68.03
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_mstrain_2x_coco/gfl_r101_fpn_mstrain_2x_coco_20200629_200126-dd12f847.pth
+
+ - Name: gfl_r101-dconv-c3-c5_fpn_ms-2x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco_20200630_102002-134b07df.pth
+
+ - Name: gfl_x101-32x4d_fpn_ms-2x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_x101-32x4d_fpn_ms-2x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 82.64
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_mstrain_2x_coco/gfl_x101_32x4d_fpn_mstrain_2x_coco_20200630_102002-50c1ffdb.pth
+
+ - Name: gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco
+ In Collection: Generalized Focal Loss
+ Config: configs/gfl/gfl_x101-32x4d-dconv-c4-c5_fpn_ms-2x_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 93.46
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco/gfl_x101_32x4d_fpn_dconv_c4-c5_mstrain_2x_coco_20200630_102002-14a2bf25.pth
diff --git a/grounding-dino/mmdetection/configs/ghm/README.md b/grounding-dino/mmdetection/configs/ghm/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..c245cea59d45f2a1a2691ce8019bf12db4af7188
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/README.md
@@ -0,0 +1,33 @@
+# GHM
+
+> [Gradient Harmonized Single-stage Detector](https://arxiv.org/abs/1811.05181)
+
+
+
+## Abstract
+
+Despite the great success of two-stage detectors, single-stage detector is still a more elegant and efficient way, yet suffers from the two well-known disharmonies during training, i.e. the huge difference in quantity between positive and negative examples as well as between easy and hard examples. In this work, we first point out that the essential effect of the two disharmonies can be summarized in term of the gradient. Further, we propose a novel gradient harmonizing mechanism (GHM) to be a hedging for the disharmonies. The philosophy behind GHM can be easily embedded into both classification loss function like cross-entropy (CE) and regression loss function like smooth-L1 (SL1) loss. To this end, two novel loss functions called GHM-C and GHM-R are designed to balancing the gradient flow for anchor classification and bounding box refinement, respectively. Ablation study on MS COCO demonstrates that without laborious hyper-parameter tuning, both GHM-C and GHM-R can bring substantial improvement for single-stage detector. Without any whistles and bells, our model achieves 41.6 mAP on COCO test-dev set which surpasses the state-of-the-art method, Focal Loss (FL) + SL1, by 0.8.
+
+
+
+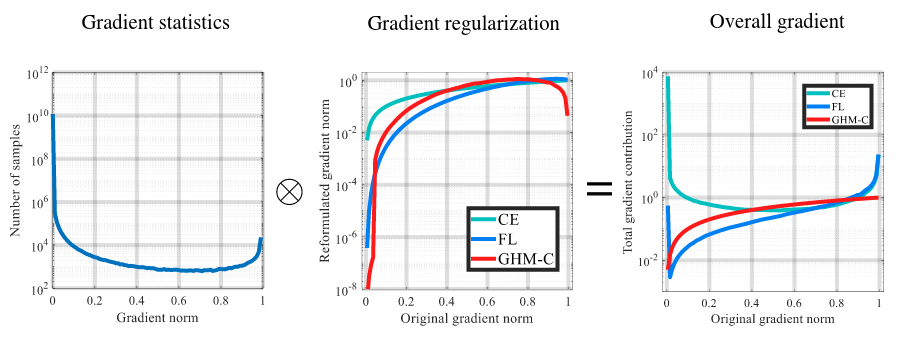 +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 4.0 | 3.3 | 37.0 | [config](./retinanet_r50_fpn_ghm-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r50_fpn_1x_coco/retinanet_ghm_r50_fpn_1x_coco_20200130-a437fda3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r50_fpn_1x_coco/retinanet_ghm_r50_fpn_1x_coco_20200130_004213.log.json) |
+| R-101-FPN | pytorch | 1x | 6.0 | 4.4 | 39.1 | [config](./retinanet_r101_fpn_ghm-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r101_fpn_1x_coco/retinanet_ghm_r101_fpn_1x_coco_20200130-c148ee8f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r101_fpn_1x_coco/retinanet_ghm_r101_fpn_1x_coco_20200130_145259.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 7.2 | 5.1 | 40.7 | [config](./retinanet_x101-32x4d_fpn_ghm-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_32x4d_fpn_1x_coco/retinanet_ghm_x101_32x4d_fpn_1x_coco_20200131-e4333bd0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_32x4d_fpn_1x_coco/retinanet_ghm_x101_32x4d_fpn_1x_coco_20200131_113653.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 10.3 | 5.2 | 41.4 | [config](./retinanet_x101-64x4d_fpn_ghm-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_64x4d_fpn_1x_coco/retinanet_ghm_x101_64x4d_fpn_1x_coco_20200131-dd381cef.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_64x4d_fpn_1x_coco/retinanet_ghm_x101_64x4d_fpn_1x_coco_20200131_113723.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{li2019gradient,
+ title={Gradient Harmonized Single-stage Detector},
+ author={Li, Buyu and Liu, Yu and Wang, Xiaogang},
+ booktitle={AAAI Conference on Artificial Intelligence},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/ghm/metafile.yml b/grounding-dino/mmdetection/configs/ghm/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..63cb48ffe7323686c38fcb279dde9ee6387e9be7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/metafile.yml
@@ -0,0 +1,101 @@
+Collections:
+ - Name: GHM
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - GHM-C
+ - GHM-R
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1811.05181
+ Title: 'Gradient Harmonized Single-stage Detector'
+ README: configs/ghm/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/losses/ghm_loss.py#L21
+ Version: v2.0.0
+
+Models:
+ - Name: retinanet_r50_fpn_ghm-1x_coco
+ In Collection: GHM
+ Config: configs/ghm/retinanet_r50_fpn_ghm-1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.0
+ inference time (ms/im):
+ - value: 303.03
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r50_fpn_1x_coco/retinanet_ghm_r50_fpn_1x_coco_20200130-a437fda3.pth
+
+ - Name: retinanet_r101_fpn_ghm-1x_coco
+ In Collection: GHM
+ Config: configs/ghm/retinanet_r101_fpn_ghm-1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.0
+ inference time (ms/im):
+ - value: 227.27
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_r101_fpn_1x_coco/retinanet_ghm_r101_fpn_1x_coco_20200130-c148ee8f.pth
+
+ - Name: retinanet_x101-32x4d_fpn_ghm-1x_coco
+ In Collection: GHM
+ Config: configs/ghm/retinanet_x101-32x4d_fpn_ghm-1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ inference time (ms/im):
+ - value: 196.08
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_32x4d_fpn_1x_coco/retinanet_ghm_x101_32x4d_fpn_1x_coco_20200131-e4333bd0.pth
+
+ - Name: retinanet_x101-64x4d_fpn_ghm-1x_coco
+ In Collection: GHM
+ Config: configs/ghm/retinanet_x101-64x4d_fpn_ghm-1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ inference time (ms/im):
+ - value: 192.31
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ghm/retinanet_ghm_x101_64x4d_fpn_1x_coco/retinanet_ghm_x101_64x4d_fpn_1x_coco_20200131-dd381cef.pth
diff --git a/grounding-dino/mmdetection/configs/ghm/retinanet_r101_fpn_ghm-1x_coco.py b/grounding-dino/mmdetection/configs/ghm/retinanet_r101_fpn_ghm-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..090221e68f68a95cfcf092b15f2636cd28fc9d87
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/retinanet_r101_fpn_ghm-1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './retinanet_r50_fpn_ghm-1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/ghm/retinanet_r50_fpn_ghm-1x_coco.py b/grounding-dino/mmdetection/configs/ghm/retinanet_r50_fpn_ghm-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..42b9aa6d05dc64f3045685a7c23d632a6041249c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/retinanet_r50_fpn_ghm-1x_coco.py
@@ -0,0 +1,18 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ loss_cls=dict(
+ _delete_=True,
+ type='GHMC',
+ bins=30,
+ momentum=0.75,
+ use_sigmoid=True,
+ loss_weight=1.0),
+ loss_bbox=dict(
+ _delete_=True,
+ type='GHMR',
+ mu=0.02,
+ bins=10,
+ momentum=0.7,
+ loss_weight=10.0)))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/ghm/retinanet_x101-32x4d_fpn_ghm-1x_coco.py b/grounding-dino/mmdetection/configs/ghm/retinanet_x101-32x4d_fpn_ghm-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1240545a624a70c7122829e85b426cafcc3f42d2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/retinanet_x101-32x4d_fpn_ghm-1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_ghm-1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/ghm/retinanet_x101-64x4d_fpn_ghm-1x_coco.py b/grounding-dino/mmdetection/configs/ghm/retinanet_x101-64x4d_fpn_ghm-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..689d2edcdf1bdffa52ee3aa3a8a4dac7988f6fa5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ghm/retinanet_x101-64x4d_fpn_ghm-1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_ghm-1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/glip/README.md b/grounding-dino/mmdetection/configs/glip/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e74e98d1b578824778edc4ae47741b147c420cca
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/README.md
@@ -0,0 +1,173 @@
+# GLIP: Grounded Language-Image Pre-training
+
+> [GLIP: Grounded Language-Image Pre-training](https://arxiv.org/abs/2112.03857)
+
+
+
+## Abstract
+
+This paper presents a grounded language-image pre-training (GLIP) model for learning object-level, language-aware, and semantic-rich visual representations. GLIP unifies object detection and phrase grounding for pre-training. The unification brings two benefits: 1) it allows GLIP to learn from both detection and grounding data to improve both tasks and bootstrap a good grounding model; 2) GLIP can leverage massive image-text pairs by generating grounding boxes in a self-training fashion, making the learned representation semantic-rich. In our experiments, we pre-train GLIP on 27M grounding data, including 3M human-annotated and 24M web-crawled image-text pairs. The learned representations demonstrate strong zero-shot and few-shot transferability to various object-level recognition tasks. 1) When directly evaluated on COCO and LVIS (without seeing any images in COCO during pre-training), GLIP achieves 49.8 AP and 26.9 AP, respectively, surpassing many supervised baselines. 2) After fine-tuned on COCO, GLIP achieves 60.8 AP on val and 61.5 AP on test-dev, surpassing prior SoTA. 3) When transferred to 13 downstream object detection tasks, a 1-shot GLIP rivals with a fully-supervised Dynamic Head.
+
+
+
+ +
+
+
+## Installation
+
+```shell
+cd $MMDETROOT
+
+# source installation
+pip install -r requirements/multimodal.txt
+
+# or mim installation
+mim install mmdet[multimodal]
+```
+
+```shell
+cd $MMDETROOT
+
+wget https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth
+
+python demo/image_demo.py demo/demo.jpg \
+configs/glip/glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py \
+--weights glip_tiny_a_mmdet-b3654169.pth \
+--texts 'bench. car'
+```
+
+
+ +
+
+
+## NOTE
+
+GLIP utilizes BERT as the language model, which requires access to https://huggingface.co/. If you encounter connection errors due to network access, you can download the required files on a computer with internet access and save them locally. Finally, modify the `lang_model_name` field in the config to the local path. Please refer to the following code:
+
+```python
+from transformers import BertConfig, BertModel
+from transformers import AutoTokenizer
+
+config = BertConfig.from_pretrained("bert-base-uncased")
+model = BertModel.from_pretrained("bert-base-uncased", add_pooling_layer=False, config=config)
+tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased")
+
+config.save_pretrained("your path/bert-base-uncased")
+model.save_pretrained("your path/bert-base-uncased")
+tokenizer.save_pretrained("your path/bert-base-uncased")
+```
+
+## COCO Results and Models
+
+| Model | Zero-shot or Finetune | COCO mAP | Official COCO mAP | Pre-Train Data | Config | Download |
+| :--------: | :-------------------: | :------: | ----------------: | :------------------------: | :---------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| GLIP-T (A) | Zero-shot | 43.0 | 42.9 | O365 | [config](glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth) |
+| GLIP-T (A) | Finetune | 53.3 | 52.9 | O365 | [config](glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_180419-e6addd96.pth)\| [log](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_180419.log.json) |
+| GLIP-T (B) | Zero-shot | 44.9 | 44.9 | O365 | [config](glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_b_mmdet-6dfbd102.pth) |
+| GLIP-T (B) | Finetune | 54.1 | 53.8 | O365 | [config](glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230916_163538-650323ba.pth)\| [log](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230916_163538.log.json) |
+| GLIP-T (C) | Zero-shot | 46.7 | 46.7 | O365,GoldG | [config](glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_c_mmdet-2fc427dd.pth) |
+| GLIP-T (C) | Finetune | 55.2 | 55.1 | O365,GoldG | [config](glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_182935-4ba3fc3b.pth)\| [log](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_182935.log.json) |
+| GLIP-T | Zero-shot | 46.6 | 46.6 | O365,GoldG,CC3M,SBU | [config](glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_mmdet-c24ce662.pth) |
+| GLIP-T | Finetune | 55.4 | 55.2 | O365,GoldG,CC3M,SBU | [config](glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_224410-ba97be24.pth)\| [log](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_224410.log.json) |
+| GLIP-L | Zero-shot | 51.3 | 51.4 | FourODs,GoldG,CC3M+12M,SBU | [config](glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_l_mmdet-abfe026b.pth) |
+| GLIP-L | Finetune | 59.4 | | FourODs,GoldG,CC3M+12M,SBU | [config](glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230910_100800-e9be4274.pth)\| [log](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230910_100800.log.json) |
+
+Note:
+
+1. The weights corresponding to the zero-shot model are adopted from the official weights and converted using the [script](../../tools/model_converters/glip_to_mmdet.py). We have not retrained the model for the time being.
+2. Finetune refers to fine-tuning on the COCO 2017 dataset. The L model is trained using 16 A100 GPUs, while the remaining models are trained using 16 NVIDIA GeForce 3090 GPUs.
+3. Taking the GLIP-T(A) model as an example, I trained it twice using the official code, and the fine-tuning mAP were 52.5 and 52.6. Therefore, the mAP we achieved in our reproduction is higher than the official results. The main reason is that we modified the `weight_decay` parameter.
+4. Our experiments revealed that training for 24 epochs leads to overfitting. Therefore, we chose the best-performing model. If users want to train on a custom dataset, it is advisable to shorten the number of epochs and save the best-performing model.
+5. Due to the official absence of fine-tuning hyperparameters for the GLIP-L model, we have not yet reproduced the official accuracy. I have found that overfitting can also occur, so it may be necessary to consider custom modifications to data augmentation and model enhancement. Given the high cost of training, we have not conducted any research on this matter at the moment.
+
+## LVIS Results
+
+| Model | Official | MiniVal APr | MiniVal APc | MiniVal APf | MiniVal AP | Val1.0 APr | Val1.0 APc | Val1.0 APf | Val1.0 AP | Pre-Train Data | Config | Download |
+| :--------: | :------: | :---------: | :---------: | :---------: | :--------: | :--------: | :--------: | :--------: | :-------: | :------------------------: | :---------------------------------------------------------------------: | :------------------------------------------------------------------------------------------: |
+| GLIP-T (A) | ✔ | | | | | | | | | O365 | [config](lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth) |
+| GLIP-T (A) | | 12.1 | 15.5 | 25.8 | 20.2 | 6.2 | 10.9 | 22.8 | 14.7 | O365 | [config](lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth) |
+| GLIP-T (B) | ✔ | | | | | | | | | O365 | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_b_mmdet-6dfbd102.pth) |
+| GLIP-T (B) | | 8.6 | 13.9 | 26.0 | 19.3 | 4.6 | 9.8 | 22.6 | 13.9 | O365 | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_b_mmdet-6dfbd102.pth) |
+| GLIP-T (C) | ✔ | 14.3 | 19.4 | 31.1 | 24.6 | | | | | O365,GoldG | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_c_mmdet-2fc427dd.pth) |
+| GLIP-T (C) | | 14.4 | 19.8 | 31.9 | 25.2 | 8.3 | 13.2 | 28.1 | 18.2 | O365,GoldG | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_c_mmdet-2fc427dd.pth) |
+| GLIP-T | ✔ | | | | | | | | | O365,GoldG,CC3M,SBU | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_mmdet-c24ce662.pth) |
+| GLIP-T | | 18.1 | 21.2 | 33.1 | 26.7 | 10.8 | 14.7 | 29.0 | 19.6 | O365,GoldG,CC3M,SBU | [config](lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_mmdet-c24ce662.pth) |
+| GLIP-L | ✔ | 29.2 | 34.9 | 42.1 | 37.9 | | | | | FourODs,GoldG,CC3M+12M,SBU | [config](lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_l_mmdet-abfe026b.pth) |
+| GLIP-L | | 27.9 | 33.7 | 39.7 | 36.1 | 20.2 | 25.8 | 35.3 | 28.5 | FourODs,GoldG,CC3M+12M,SBU | [config](lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/glip/glip_l_mmdet-abfe026b.pth) |
+
+Note:
+
+1. The above are zero-shot evaluation results.
+2. The evaluation metric we used is LVIS FixAP. For specific details, please refer to [Evaluating Large-Vocabulary Object Detectors: The Devil is in the Details](https://arxiv.org/pdf/2102.01066.pdf).
+3. We found that the performance on small models is better than the official results, but it is lower on large models. This is mainly due to the incomplete alignment of the GLIP post-processing.
+
+## ODinW (Object Detection in the Wild) Results
+
+Learning visual representations from natural language supervision has recently shown great promise in a number of pioneering works. In general, these language-augmented visual models demonstrate strong transferability to a variety of datasets and tasks. However, it remains challenging to evaluate the transferablity of these models due to the lack of easy-to-use evaluation toolkits and public benchmarks. To tackle this, we build ELEVATER 1 , the first benchmark and toolkit for evaluating (pre-trained) language-augmented visual models. ELEVATER is composed of three components. (i) Datasets. As downstream evaluation suites, it consists of 20 image classification datasets and 35 object detection datasets, each of which is augmented with external knowledge. (ii) Toolkit. An automatic hyper-parameter tuning toolkit is developed to facilitate model evaluation on downstream tasks. (iii) Metrics. A variety of evaluation metrics are used to measure sample-efficiency (zero-shot and few-shot) and parameter-efficiency (linear probing and full model fine-tuning). ELEVATER is platform for Computer Vision in the Wild (CVinW), and is publicly released at https://computer-vision-in-the-wild.github.io/ELEVATER/
+
+### Results and models of ODinW13
+
+| Method | GLIP-T(A) | Official | GLIP-T(B) | Official | GLIP-T(C) | Official | GroundingDINO-T | GroundingDINO-B |
+| --------------------- | --------- | --------- | --------- | --------- | --------- | --------- | --------------- | --------------- |
+| AerialMaritimeDrone | 0.123 | 0.122 | 0.110 | 0.110 | 0.130 | 0.130 | 0.173 | 0.281 |
+| Aquarium | 0.175 | 0.174 | 0.173 | 0.169 | 0.191 | 0.190 | 0.195 | 0.445 |
+| CottontailRabbits | 0.686 | 0.686 | 0.688 | 0.688 | 0.744 | 0.744 | 0.799 | 0.808 |
+| EgoHands | 0.013 | 0.013 | 0.003 | 0.004 | 0.314 | 0.315 | 0.608 | 0.764 |
+| NorthAmericaMushrooms | 0.502 | 0.502 | 0.367 | 0.367 | 0.297 | 0.296 | 0.507 | 0.675 |
+| Packages | 0.589 | 0.589 | 0.083 | 0.083 | 0.699 | 0.699 | 0.687 | 0.670 |
+| PascalVOC | 0.512 | 0.512 | 0.541 | 0.540 | 0.565 | 0.565 | 0.563 | 0.711 |
+| pistols | 0.339 | 0.339 | 0.502 | 0.501 | 0.503 | 0.504 | 0.726 | 0.771 |
+| pothole | 0.007 | 0.007 | 0.030 | 0.030 | 0.058 | 0.058 | 0.215 | 0.478 |
+| Raccoon | 0.075 | 0.074 | 0.285 | 0.288 | 0.241 | 0.244 | 0.549 | 0.541 |
+| ShellfishOpenImages | 0.253 | 0.253 | 0.337 | 0.338 | 0.300 | 0.302 | 0.393 | 0.650 |
+| thermalDogsAndPeople | 0.372 | 0.372 | 0.475 | 0.475 | 0.510 | 0.510 | 0.657 | 0.633 |
+| VehiclesOpenImages | 0.574 | 0.566 | 0.562 | 0.547 | 0.549 | 0.534 | 0.613 | 0.647 |
+| Average | **0.325** | **0.324** | **0.320** | **0.318** | **0.392** | **0.392** | **0.514** | **0.621** |
+
+### Results and models of ODinW35
+
+| Method | GLIP-T(A) | Official | GLIP-T(B) | Official | GLIP-T(C) | Official | GroundingDINO-T | GroundingDINO-B |
+| --------------------------- | --------- | --------- | --------- | --------- | --------- | --------- | --------------- | --------------- |
+| AerialMaritimeDrone_large | 0.123 | 0.122 | 0.110 | 0.110 | 0.130 | 0.130 | 0.173 | 0.281 |
+| AerialMaritimeDrone_tiled | 0.174 | 0.174 | 0.172 | 0.172 | 0.172 | 0.172 | 0.206 | 0.364 |
+| AmericanSignLanguageLetters | 0.001 | 0.001 | 0.003 | 0.003 | 0.009 | 0.009 | 0.002 | 0.096 |
+| Aquarium | 0.175 | 0.175 | 0.173 | 0.171 | 0.192 | 0.182 | 0.195 | 0.445 |
+| BCCD | 0.016 | 0.016 | 0.001 | 0.001 | 0.000 | 0.000 | 0.161 | 0.584 |
+| boggleBoards | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.134 |
+| brackishUnderwater | 0.016 | 0..013 | 0.021 | 0.027 | 0.020 | 0.022 | 0.021 | 0.454 |
+| ChessPieces | 0.001 | 0.001 | 0.000 | 0.000 | 0.001 | 0.001 | 0.000 | 0.000 |
+| CottontailRabbits | 0.710 | 0.709 | 0.683 | 0.683 | 0.752 | 0.752 | 0.806 | 0.797 |
+| dice | 0.005 | 0.005 | 0.004 | 0.004 | 0.004 | 0.004 | 0.004 | 0.082 |
+| DroneControl | 0.016 | 0.017 | 0.006 | 0.008 | 0.005 | 0.007 | 0.042 | 0.638 |
+| EgoHands_generic | 0.009 | 0.010 | 0.005 | 0.006 | 0.510 | 0.508 | 0.608 | 0.764 |
+| EgoHands_specific | 0.001 | 0.001 | 0.004 | 0.006 | 0.003 | 0.004 | 0.002 | 0.687 |
+| HardHatWorkers | 0.029 | 0.029 | 0.023 | 0.023 | 0.033 | 0.033 | 0.046 | 0.439 |
+| MaskWearing | 0.007 | 0.007 | 0.003 | 0.002 | 0.005 | 0.005 | 0.004 | 0.406 |
+| MountainDewCommercial | 0.218 | 0.227 | 0.199 | 0.197 | 0.478 | 0.463 | 0.430 | 0.580 |
+| NorthAmericaMushrooms | 0.502 | 0.502 | 0.450 | 0.450 | 0.497 | 0.497 | 0.471 | 0.501 |
+| openPoetryVision | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.051 |
+| OxfordPets_by_breed | 0.001 | 0.002 | 0.002 | 0.004 | 0.001 | 0.002 | 0.003 | 0.799 |
+| OxfordPets_by_species | 0.016 | 0.011 | 0.012 | 0.009 | 0.013 | 0.009 | 0.011 | 0.872 |
+| PKLot | 0.002 | 0.002 | 0.000 | 0.000 | 0.000 | 0.000 | 0.001 | 0.774 |
+| Packages | 0.569 | 0.569 | 0.279 | 0.279 | 0.712 | 0.712 | 0.695 | 0.728 |
+| PascalVOC | 0.512 | 0.512 | 0.541 | 0.540 | 0.565 | 0.565 | 0.563 | 0.711 |
+| pistols | 0.339 | 0.339 | 0.502 | 0.501 | 0.503 | 0.504 | 0.726 | 0.771 |
+| plantdoc | 0.002 | 0.002 | 0.007 | 0.007 | 0.009 | 0.009 | 0.005 | 0.376 |
+| pothole | 0.007 | 0.010 | 0.024 | 0.025 | 0.085 | 0.101 | 0.215 | 0.478 |
+| Raccoons | 0.075 | 0.074 | 0.285 | 0.288 | 0.241 | 0.244 | 0.549 | 0.541 |
+| selfdrivingCar | 0.071 | 0.072 | 0.074 | 0.074 | 0.081 | 0.080 | 0.089 | 0.318 |
+| ShellfishOpenImages | 0.253 | 0.253 | 0.337 | 0.338 | 0.300 | 0.302 | 0.393 | 0.650 |
+| ThermalCheetah | 0.028 | 0.028 | 0.000 | 0.000 | 0.028 | 0.028 | 0.087 | 0.290 |
+| thermalDogsAndPeople | 0.372 | 0.372 | 0.475 | 0.475 | 0.510 | 0.510 | 0.657 | 0.633 |
+| UnoCards | 0.000 | 0.000 | 0.000 | 0.001 | 0.002 | 0.003 | 0.006 | 0.754 |
+| VehiclesOpenImages | 0.574 | 0.566 | 0.562 | 0.547 | 0.549 | 0.534 | 0.613 | 0.647 |
+| WildfireSmoke | 0.000 | 0.000 | 0.000 | 0.000 | 0.017 | 0.017 | 0.134 | 0.410 |
+| websiteScreenshots | 0.003 | 0.004 | 0.003 | 0.005 | 0.005 | 0.006 | 0.012 | 0.175 |
+| Average | **0.134** | **0.134** | **0.138** | **0.138** | **0.179** | **0.178** | **0.227** | **0.492** |
+
+### Results on Flickr30k
+
+| Model | Official | Pre-Train Data | Val R@1 | Val R@5 | Val R@10 | Test R@1 | Test R@5 | Test R@10 |
+| ------------- | -------- | ------------------- | ------- | ------- | -------- | -------- | -------- | --------- |
+| **GLIP-T(C)** | ✔ | O365, GoldG | 84.8 | 94.9 | 96.3 | 85.5 | 95.4 | 96.6 |
+| **GLIP-T(C)** | | O365, GoldG | 84.9 | 94.9 | 96.3 | 85.6 | 95.4 | 96.7 |
+| **GLIP-T** | | O365,GoldG,CC3M,SBU | 85.3 | 95.5 | 96.9 | 86.0 | 95.9 | 97.2 |
diff --git a/grounding-dino/mmdetection/configs/glip/flickr30k/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg_zeroshot_flickr30k.py b/grounding-dino/mmdetection/configs/glip/flickr30k/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg_zeroshot_flickr30k.py
new file mode 100644
index 0000000000000000000000000000000000000000..14d6e8aaa6372a5272467dd46d33e80979298efc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/flickr30k/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg_zeroshot_flickr30k.py
@@ -0,0 +1,61 @@
+_base_ = '../glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+lang_model_name = 'bert-base-uncased'
+
+model = dict(bbox_head=dict(early_fuse=True))
+
+dataset_type = 'Flickr30kDataset'
+data_root = 'data/flickr30k_entities/'
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile', backend_args=None,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities',
+ 'tokens_positive', 'phrase_ids', 'phrases'))
+]
+
+dataset_Flickr30k_val = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='final_flickr_separateGT_val.json',
+ data_prefix=dict(img='flickr30k_images/'),
+ pipeline=test_pipeline,
+)
+
+dataset_Flickr30k_test = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='final_flickr_separateGT_test.json',
+ data_prefix=dict(img='flickr30k_images/'),
+ pipeline=test_pipeline,
+)
+
+val_evaluator_Flickr30k = dict(type='Flickr30kMetric', )
+
+test_evaluator_Flickr30k = dict(type='Flickr30kMetric', )
+
+# ----------Config---------- #
+dataset_prefixes = ['Flickr30kVal', 'Flickr30kTest']
+datasets = [dataset_Flickr30k_val, dataset_Flickr30k_test]
+metrics = [val_evaluator_Flickr30k, test_evaluator_Flickr30k]
+
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..92a85a11d57b6d3d64bfed5f9a691bca739d7ce3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
@@ -0,0 +1,14 @@
+_base_ = './glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py'
+
+model = dict(
+ backbone=dict(
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ drop_path_rate=0.4,
+ ),
+ neck=dict(in_channels=[384, 768, 1536]),
+ bbox_head=dict(early_fuse=True, num_dyhead_blocks=8, use_checkpoint=True))
+
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/glip/glip_l_mmdet-abfe026b.pth' # noqa
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata.py
new file mode 100644
index 0000000000000000000000000000000000000000..546ecfe1d513b4161322f5ffa0e51d01b2775780
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata.py
@@ -0,0 +1,12 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+model = dict(
+ backbone=dict(
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ drop_path_rate=0.4,
+ ),
+ neck=dict(in_channels=[384, 768, 1536]),
+ bbox_head=dict(early_fuse=True, num_dyhead_blocks=8))
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4b280657b315c77dd118ab84880d97dc882102a1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
@@ -0,0 +1,155 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth' # noqa
+lang_model_name = 'bert-base-uncased'
+
+model = dict(
+ type='GLIP',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(1, 2, 3),
+ with_cp=False,
+ convert_weights=False),
+ neck=dict(
+ type='FPN_DropBlock',
+ in_channels=[192, 384, 768],
+ out_channels=256,
+ start_level=0,
+ relu_before_extra_convs=True,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='ATSSVLFusionHead',
+ lang_model_name=lang_model_name,
+ num_classes=80,
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128],
+ center_offset=0.5),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoderForGLIP',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ language_model=dict(type='BertModel', name=lang_model_name),
+ train_cfg=dict(
+ assigner=dict(
+ type='ATSSAssigner',
+ topk=9,
+ iou_calculator=dict(type='BboxOverlaps2D_GLIP')),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# dataset settings
+train_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ imdecode_backend='pillow',
+ backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='GTBoxSubOne_GLIP'),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 480), (1333, 560), (1333, 640), (1333, 720),
+ (1333, 800)],
+ keep_ratio=True,
+ resize_type='FixScaleResize',
+ backend='pillow'),
+ dict(type='RandomFlip_GLIP', prob=0.5),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1, 1)),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction', 'text',
+ 'custom_entities'))
+]
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ backend_args=_base_.backend_args,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities'))
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ _delete_=True,
+ type='RepeatDataset',
+ times=2,
+ dataset=dict(
+ type=_base_.dataset_type,
+ data_root=_base_.data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ return_classes=True,
+ backend_args=_base_.backend_args)))
+
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, return_classes=True))
+test_dataloader = val_dataloader
+
+# We did not adopt the official 24e optimizer strategy
+# because the results indicate that the current strategy is superior.
+optim_wrapper = dict(
+ _delete_=True,
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW', lr=0.00002, betas=(0.9, 0.999), weight_decay=0.05),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'relative_position_bias_table': dict(decay_mult=0.),
+ 'norm': dict(decay_mult=0.)
+ }),
+ clip_grad=None)
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py
new file mode 100644
index 0000000000000000000000000000000000000000..34a818caefcbfcdd9e51ec304fb94906c20ceb9a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py
@@ -0,0 +1,90 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+lang_model_name = 'bert-base-uncased'
+
+model = dict(
+ type='GLIP',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(1, 2, 3),
+ with_cp=False,
+ convert_weights=False),
+ neck=dict(
+ type='FPN',
+ in_channels=[192, 384, 768],
+ out_channels=256,
+ start_level=0,
+ relu_before_extra_convs=True,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='ATSSVLFusionHead',
+ lang_model_name=lang_model_name,
+ num_classes=80,
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128],
+ center_offset=0.5),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoderForGLIP',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ ),
+ language_model=dict(type='BertModel', name=lang_model_name),
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ backend_args=_base_.backend_args,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities'))
+]
+
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, return_classes=True))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3487de3f3a24077f475e8451722d1b4d252a0084
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
@@ -0,0 +1,9 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py'
+
+model = dict(bbox_head=dict(early_fuse=True, use_checkpoint=True))
+
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_b_mmdet-6dfbd102.pth' # noqa
+
+optim_wrapper = dict(
+ optimizer=dict(lr=0.00001),
+ clip_grad=dict(_delete_=True, max_norm=1, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py
new file mode 100644
index 0000000000000000000000000000000000000000..6334e5e3b4043a81d154fc03a94594d93d74aed5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+model = dict(bbox_head=dict(early_fuse=True))
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5c315e490e7a7e05a6334d4d38ce9be9b70851b3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py'
+
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_c_mmdet-2fc427dd.pth' # noqa
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg.py
new file mode 100644
index 0000000000000000000000000000000000000000..24898f4df532cc2e2728265800d2f6a030e8efe0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg.py
@@ -0,0 +1 @@
+_base_ = './glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py'
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3391272e608e8098773a6435550e578f462ed886
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py'
+
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_mmdet-c24ce662.pth' # noqa
diff --git a/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub.py b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub.py
new file mode 100644
index 0000000000000000000000000000000000000000..24898f4df532cc2e2728265800d2f6a030e8efe0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub.py
@@ -0,0 +1 @@
+_base_ = './glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py'
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..1f79e447d3f24e364739740be504bb234adc1e98
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_lvis.py
@@ -0,0 +1,12 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py'
+
+model = dict(
+ backbone=dict(
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ drop_path_rate=0.4,
+ ),
+ neck=dict(in_channels=[384, 768, 1536]),
+ bbox_head=dict(early_fuse=True, num_dyhead_blocks=8))
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..13f1a69082b670632dfe3eb8dc50826549dcf59f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-l_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
@@ -0,0 +1,12 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_mini-lvis.py'
+
+model = dict(
+ backbone=dict(
+ embed_dims=192,
+ depths=[2, 2, 18, 2],
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ drop_path_rate=0.4,
+ ),
+ neck=dict(in_channels=[384, 768, 1536]),
+ bbox_head=dict(early_fuse=True, num_dyhead_blocks=8))
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d526d59008b39996a147a2852a44d2e936113d2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py
@@ -0,0 +1,24 @@
+_base_ = '../glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+model = dict(test_cfg=dict(
+ max_per_img=300,
+ chunked_size=40,
+))
+
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/coco/'
+
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ type=dataset_type,
+ ann_file='annotations/lvis_od_val.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+# numpy < 1.24.0
+val_evaluator = dict(
+ _delete_=True,
+ type='LVISFixedAPMetric',
+ ann_file=data_root + 'annotations/lvis_od_val.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..70a57a3f581ca1c374dbae71059c7049a20d3a47
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
@@ -0,0 +1,25 @@
+_base_ = '../glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+model = dict(test_cfg=dict(
+ max_per_img=300,
+ chunked_size=40,
+))
+
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/coco/'
+
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ type=dataset_type,
+ ann_file='annotations/lvis_v1_minival_inserted_image_name.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+# numpy < 1.24.0
+val_evaluator = dict(
+ _delete_=True,
+ type='LVISFixedAPMetric',
+ ann_file=data_root +
+ 'annotations/lvis_v1_minival_inserted_image_name.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..6dc712b3bcb4f8dd1018b175d3a4e7f59be3a990
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_lvis.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_lvis.py'
+
+model = dict(bbox_head=dict(early_fuse=True))
diff --git a/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..3babb91101a6dc283ada78911672c7c7433f67ac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/lvis/glip_atss_swin-t_bc_fpn_dyhead_pretrain_zeroshot_mini-lvis.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_zeroshot_mini-lvis.py'
+
+model = dict(bbox_head=dict(early_fuse=True))
diff --git a/grounding-dino/mmdetection/configs/glip/metafile.yml b/grounding-dino/mmdetection/configs/glip/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fbbf718b9fff3061a4e02a7d39a6c95252beb603
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/metafile.yml
@@ -0,0 +1,111 @@
+Collections:
+ - Name: GLIP
+ Metadata:
+ Training Data: Objects365, GoldG, CC3M, SBU and COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: A100 GPUs
+ Architecture:
+ - Swin Transformer
+ - DYHead
+ - BERT
+ Paper:
+ URL: https://arxiv.org/abs/2112.03857
+ Title: 'GLIP: Grounded Language-Image Pre-training'
+ README: configs/glip/README.md
+ Code:
+ URL:
+ Version: v3.0.0
+
+Models:
+ - Name: glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_a_mmdet-b3654169.pth
+ - Name: glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_b_fpn_dyhead_pretrain_obj365.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_b_mmdet-6dfbd102.pth
+ - Name: glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_c_fpn_dyhead_pretrain_obj365-goldg.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.7
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_c_mmdet-2fc427dd.pth
+ - Name: glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_fpn_dyhead_pretrain_obj365-goldg-cc3m-sub.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_tiny_mmdet-c24ce662.pth
+ - Name: glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-l_fpn_dyhead_pretrain_mixeddata.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 51.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_l_mmdet-abfe026b.pth
+ - Name: glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 53.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_a_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_180419-e6addd96.pth
+ - Name: glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 54.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_b_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230916_163538-650323ba.pth
+ - Name: glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 55.2
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_c_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_182935-4ba3fc3b.pth
+ - Name: glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 55.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-t_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230914_224410-ba97be24.pth
+ - Name: glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco
+ In Collection: GLIP
+ Config: configs/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 59.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/glip/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco/glip_atss_swin-l_fpn_dyhead_16xb2_ms-2x_funtune_coco_20230910_100800-e9be4274.pth
diff --git a/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw13.py b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw13.py
new file mode 100644
index 0000000000000000000000000000000000000000..d38effba8c1333a2403c6bc0f20b7fde21c4c47d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw13.py
@@ -0,0 +1,338 @@
+_base_ = '../glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ test_mode=True,
+ pipeline=base_test_pipeline,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'penguin': {
+# 'suffix': ', which is black and white'
+# },
+# 'puffin': {
+# 'suffix': ' with orange beaks'
+# },
+# 'stingray': {
+# 'suffix': ' which is flat and round'
+# },
+# }
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 CottontailRabbits---------------------#
+class_name = ('Cottontail-Rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+
+caption_prompt = None
+# caption_prompt = {'Cottontail-Rabbit': {'name': 'rabbit'}}
+
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 EgoHands---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+
+caption_prompt = None
+# caption_prompt = {'hand': {'suffix': ' of a person'}}
+
+dataset_EgoHands = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 NorthAmericaMushrooms---------------------#
+class_name = ('CoW', 'chanterelle')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+
+caption_prompt = None
+# caption_prompt = {
+# 'CoW': {
+# 'name': 'flat mushroom'
+# },
+# 'chanterelle': {
+# 'name': 'yellow mushroom'
+# }
+# }
+
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'package': {
+# 'prefix': 'there is a ',
+# 'suffix': ' on the porch'
+# }
+# }
+
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'pothole': {
+# 'prefix': 'there are some ',
+# 'name': 'holes',
+# 'suffix': ' on the road'
+# }
+# }
+
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+dataset_prefixes = [
+ 'AerialMaritimeDrone', 'Aquarium', 'CottontailRabbits', 'EgoHands',
+ 'NorthAmericaMushrooms', 'Packages', 'PascalVOC', 'pistols', 'pothole',
+ 'Raccoon', 'ShellfishOpenImages', 'thermalDogsAndPeople',
+ 'VehiclesOpenImages'
+]
+datasets = [
+ dataset_AerialMaritimeDrone, dataset_Aquarium, dataset_CottontailRabbits,
+ dataset_EgoHands, dataset_NorthAmericaMushrooms, dataset_Packages,
+ dataset_PascalVOC, dataset_pistols, dataset_pothole, dataset_Raccoon,
+ dataset_ShellfishOpenImages, dataset_thermalDogsAndPeople,
+ dataset_VehiclesOpenImages
+]
+metrics = [
+ val_evaluator_AerialMaritimeDrone, val_evaluator_Aquarium,
+ val_evaluator_CottontailRabbits, val_evaluator_EgoHands,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_Packages,
+ val_evaluator_PascalVOC, val_evaluator_pistols, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_ShellfishOpenImages,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_VehiclesOpenImages
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw35.py b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw35.py
new file mode 100644
index 0000000000000000000000000000000000000000..2eaf09ed771978397b9d67048b371724418e50aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw35.py
@@ -0,0 +1,794 @@
+_base_ = '../glip_atss_swin-t_a_fpn_dyhead_pretrain_obj365.py'
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone_large---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone_large = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_large = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 AerialMaritimeDrone_tiled---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/tiled/'
+dataset_AerialMaritimeDrone_tiled = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_tiled = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 AmericanSignLanguageLetters---------------------#
+class_name = ('A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K', 'L', 'M',
+ 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AmericanSignLanguageLetters/American Sign Language Letters.v1-v1.coco/' # noqa
+dataset_AmericanSignLanguageLetters = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AmericanSignLanguageLetters = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 BCCD---------------------#
+class_name = ('Platelets', 'RBC', 'WBC')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'BCCD/BCCD.v3-raw.coco/'
+dataset_BCCD = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_BCCD = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 boggleBoards---------------------#
+class_name = ('Q', 'a', 'an', 'b', 'c', 'd', 'e', 'er', 'f', 'g', 'h', 'he',
+ 'i', 'in', 'j', 'k', 'l', 'm', 'n', 'o', 'o ', 'p', 'q', 'qu',
+ 'r', 's', 't', 't\\', 'th', 'u', 'v', 'w', 'wild', 'x', 'y', 'z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'boggleBoards/416x416AutoOrient/export/'
+dataset_boggleBoards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_boggleBoards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 brackishUnderwater---------------------#
+class_name = ('crab', 'fish', 'jellyfish', 'shrimp', 'small_fish', 'starfish')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'brackishUnderwater/960x540/'
+dataset_brackishUnderwater = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_brackishUnderwater = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 ChessPieces---------------------#
+class_name = (' ', 'black bishop', 'black king', 'black knight', 'black pawn',
+ 'black queen', 'black rook', 'white bishop', 'white king',
+ 'white knight', 'white pawn', 'white queen', 'white rook')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/'
+dataset_ChessPieces = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ChessPieces = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 CottontailRabbits---------------------#
+class_name = ('rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 dice---------------------#
+class_name = ('1', '2', '3', '4', '5', '6')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'dice/mediumColor/export/'
+dataset_dice = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_dice = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 DroneControl---------------------#
+class_name = ('follow', 'follow_hand', 'land', 'land_hand', 'null', 'object',
+ 'takeoff', 'takeoff-hand')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'DroneControl/Drone Control.v3-raw.coco/'
+dataset_DroneControl = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_DroneControl = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 EgoHands_generic---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+caption_prompt = {'hand': {'suffix': ' of a person'}}
+dataset_EgoHands_generic = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_generic = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 EgoHands_specific---------------------#
+class_name = ('myleft', 'myright', 'yourleft', 'yourright')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/specific/'
+dataset_EgoHands_specific = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_specific = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------14 HardHatWorkers---------------------#
+class_name = ('head', 'helmet', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'HardHatWorkers/raw/'
+dataset_HardHatWorkers = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_HardHatWorkers = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------15 MaskWearing---------------------#
+class_name = ('mask', 'no-mask')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MaskWearing/raw/'
+dataset_MaskWearing = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MaskWearing = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------16 MountainDewCommercial---------------------#
+class_name = ('bottle', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MountainDewCommercial/'
+dataset_MountainDewCommercial = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MountainDewCommercial = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------17 NorthAmericaMushrooms---------------------#
+class_name = ('flat mushroom', 'yellow mushroom')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------18 openPoetryVision---------------------#
+class_name = ('American Typewriter', 'Andale Mono', 'Apple Chancery', 'Arial',
+ 'Avenir', 'Baskerville', 'Big Caslon', 'Bradley Hand',
+ 'Brush Script MT', 'Chalkboard', 'Comic Sans MS', 'Copperplate',
+ 'Courier', 'Didot', 'Futura', 'Geneva', 'Georgia', 'Gill Sans',
+ 'Helvetica', 'Herculanum', 'Impact', 'Kefa', 'Lucida Grande',
+ 'Luminari', 'Marker Felt', 'Menlo', 'Monaco', 'Noteworthy',
+ 'Optima', 'PT Sans', 'PT Serif', 'Palatino', 'Papyrus',
+ 'Phosphate', 'Rockwell', 'SF Pro', 'SignPainter', 'Skia',
+ 'Snell Roundhand', 'Tahoma', 'Times New Roman', 'Trebuchet MS',
+ 'Verdana')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'openPoetryVision/512x512/'
+dataset_openPoetryVision = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_openPoetryVision = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------19 OxfordPets_by_breed---------------------#
+class_name = ('cat-Abyssinian', 'cat-Bengal', 'cat-Birman', 'cat-Bombay',
+ 'cat-British_Shorthair', 'cat-Egyptian_Mau', 'cat-Maine_Coon',
+ 'cat-Persian', 'cat-Ragdoll', 'cat-Russian_Blue', 'cat-Siamese',
+ 'cat-Sphynx', 'dog-american_bulldog',
+ 'dog-american_pit_bull_terrier', 'dog-basset_hound',
+ 'dog-beagle', 'dog-boxer', 'dog-chihuahua',
+ 'dog-english_cocker_spaniel', 'dog-english_setter',
+ 'dog-german_shorthaired', 'dog-great_pyrenees', 'dog-havanese',
+ 'dog-japanese_chin', 'dog-keeshond', 'dog-leonberger',
+ 'dog-miniature_pinscher', 'dog-newfoundland', 'dog-pomeranian',
+ 'dog-pug', 'dog-saint_bernard', 'dog-samoyed',
+ 'dog-scottish_terrier', 'dog-shiba_inu',
+ 'dog-staffordshire_bull_terrier', 'dog-wheaten_terrier',
+ 'dog-yorkshire_terrier')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-breed/' # noqa
+dataset_OxfordPets_by_breed = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_breed = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------20 OxfordPets_by_species---------------------#
+class_name = ('cat', 'dog')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-species/' # noqa
+dataset_OxfordPets_by_species = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_species = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------21 PKLot---------------------#
+class_name = ('space-empty', 'space-occupied')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PKLot/640/' # noqa
+dataset_PKLot = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PKLot = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------22 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+caption_prompt = {
+ 'package': {
+ 'prefix': 'there is a ',
+ 'suffix': ' on the porch'
+ }
+}
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------23 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------24 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------25 plantdoc---------------------#
+class_name = ('Apple Scab Leaf', 'Apple leaf', 'Apple rust leaf',
+ 'Bell_pepper leaf', 'Bell_pepper leaf spot', 'Blueberry leaf',
+ 'Cherry leaf', 'Corn Gray leaf spot', 'Corn leaf blight',
+ 'Corn rust leaf', 'Peach leaf', 'Potato leaf',
+ 'Potato leaf early blight', 'Potato leaf late blight',
+ 'Raspberry leaf', 'Soyabean leaf', 'Soybean leaf',
+ 'Squash Powdery mildew leaf', 'Strawberry leaf',
+ 'Tomato Early blight leaf', 'Tomato Septoria leaf spot',
+ 'Tomato leaf', 'Tomato leaf bacterial spot',
+ 'Tomato leaf late blight', 'Tomato leaf mosaic virus',
+ 'Tomato leaf yellow virus', 'Tomato mold leaf',
+ 'Tomato two spotted spider mites leaf', 'grape leaf',
+ 'grape leaf black rot')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'plantdoc/416x416/'
+dataset_plantdoc = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_plantdoc = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------26 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+caption_prompt = {
+ 'pothole': {
+ 'name': 'holes',
+ 'prefix': 'there are some ',
+ 'suffix': ' on the road'
+ }
+}
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ caption_prompt=caption_prompt,
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------27 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------28 selfdrivingCar---------------------#
+class_name = ('biker', 'car', 'pedestrian', 'trafficLight',
+ 'trafficLight-Green', 'trafficLight-GreenLeft',
+ 'trafficLight-Red', 'trafficLight-RedLeft',
+ 'trafficLight-Yellow', 'trafficLight-YellowLeft', 'truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'selfdrivingCar/fixedLarge/export/'
+dataset_selfdrivingCar = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_selfdrivingCar = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------29 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------30 ThermalCheetah---------------------#
+class_name = ('cheetah', 'human')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ThermalCheetah/'
+dataset_ThermalCheetah = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ThermalCheetah = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------31 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------32 UnoCards---------------------#
+class_name = ('0', '1', '2', '3', '4', '5', '6', '7', '8', '9', '10', '11',
+ '12', '13', '14')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'UnoCards/raw/'
+dataset_UnoCards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_UnoCards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------33 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------34 WildfireSmoke---------------------#
+class_name = ('smoke', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'WildfireSmoke/'
+dataset_WildfireSmoke = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_WildfireSmoke = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------35 websiteScreenshots---------------------#
+class_name = ('button', 'field', 'heading', 'iframe', 'image', 'label', 'link',
+ 'text')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'websiteScreenshots/'
+dataset_websiteScreenshots = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_websiteScreenshots = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+
+dataset_prefixes = [
+ 'AerialMaritimeDrone_large',
+ 'AerialMaritimeDrone_tiled',
+ 'AmericanSignLanguageLetters',
+ 'Aquarium',
+ 'BCCD',
+ 'boggleBoards',
+ 'brackishUnderwater',
+ 'ChessPieces',
+ 'CottontailRabbits',
+ 'dice',
+ 'DroneControl',
+ 'EgoHands_generic',
+ 'EgoHands_specific',
+ 'HardHatWorkers',
+ 'MaskWearing',
+ 'MountainDewCommercial',
+ 'NorthAmericaMushrooms',
+ 'openPoetryVision',
+ 'OxfordPets_by_breed',
+ 'OxfordPets_by_species',
+ 'PKLot',
+ 'Packages',
+ 'PascalVOC',
+ 'pistols',
+ 'plantdoc',
+ 'pothole',
+ 'Raccoons',
+ 'selfdrivingCar',
+ 'ShellfishOpenImages',
+ 'ThermalCheetah',
+ 'thermalDogsAndPeople',
+ 'UnoCards',
+ 'VehiclesOpenImages',
+ 'WildfireSmoke',
+ 'websiteScreenshots',
+]
+
+datasets = [
+ dataset_AerialMaritimeDrone_large, dataset_AerialMaritimeDrone_tiled,
+ dataset_AmericanSignLanguageLetters, dataset_Aquarium, dataset_BCCD,
+ dataset_boggleBoards, dataset_brackishUnderwater, dataset_ChessPieces,
+ dataset_CottontailRabbits, dataset_dice, dataset_DroneControl,
+ dataset_EgoHands_generic, dataset_EgoHands_specific,
+ dataset_HardHatWorkers, dataset_MaskWearing, dataset_MountainDewCommercial,
+ dataset_NorthAmericaMushrooms, dataset_openPoetryVision,
+ dataset_OxfordPets_by_breed, dataset_OxfordPets_by_species, dataset_PKLot,
+ dataset_Packages, dataset_PascalVOC, dataset_pistols, dataset_plantdoc,
+ dataset_pothole, dataset_Raccoon, dataset_selfdrivingCar,
+ dataset_ShellfishOpenImages, dataset_ThermalCheetah,
+ dataset_thermalDogsAndPeople, dataset_UnoCards, dataset_VehiclesOpenImages,
+ dataset_WildfireSmoke, dataset_websiteScreenshots
+]
+
+metrics = [
+ val_evaluator_AerialMaritimeDrone_large,
+ val_evaluator_AerialMaritimeDrone_tiled,
+ val_evaluator_AmericanSignLanguageLetters, val_evaluator_Aquarium,
+ val_evaluator_BCCD, val_evaluator_boggleBoards,
+ val_evaluator_brackishUnderwater, val_evaluator_ChessPieces,
+ val_evaluator_CottontailRabbits, val_evaluator_dice,
+ val_evaluator_DroneControl, val_evaluator_EgoHands_generic,
+ val_evaluator_EgoHands_specific, val_evaluator_HardHatWorkers,
+ val_evaluator_MaskWearing, val_evaluator_MountainDewCommercial,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_openPoetryVision,
+ val_evaluator_OxfordPets_by_breed, val_evaluator_OxfordPets_by_species,
+ val_evaluator_PKLot, val_evaluator_Packages, val_evaluator_PascalVOC,
+ val_evaluator_pistols, val_evaluator_plantdoc, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_selfdrivingCar,
+ val_evaluator_ShellfishOpenImages, val_evaluator_ThermalCheetah,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_UnoCards,
+ val_evaluator_VehiclesOpenImages, val_evaluator_WildfireSmoke,
+ val_evaluator_websiteScreenshots
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw13.py b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw13.py
new file mode 100644
index 0000000000000000000000000000000000000000..c3479b62b781fa38282b26ab69763d1766301dc7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw13.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw13.py'
+
+model = dict(bbox_head=dict(early_fuse=True))
diff --git a/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw35.py b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw35.py
new file mode 100644
index 0000000000000000000000000000000000000000..182afc66c93441da85d7e0116970e45a58c492d0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/odinw/glip_atss_swin-t_bc_fpn_dyhead_pretrain_odinw35.py
@@ -0,0 +1,3 @@
+_base_ = './glip_atss_swin-t_a_fpn_dyhead_pretrain_odinw35.py'
+
+model = dict(bbox_head=dict(early_fuse=True))
diff --git a/grounding-dino/mmdetection/configs/glip/odinw/override_category.py b/grounding-dino/mmdetection/configs/glip/odinw/override_category.py
new file mode 100644
index 0000000000000000000000000000000000000000..9ff05fc6e5e4d0989cf7fcf7af4dc902ee99f3a3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/glip/odinw/override_category.py
@@ -0,0 +1,109 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import argparse
+
+import mmengine
+
+
+def parse_args():
+ parser = argparse.ArgumentParser(description='Override Category')
+ parser.add_argument('data_root')
+ return parser.parse_args()
+
+
+def main():
+ args = parse_args()
+
+ ChessPieces = [{
+ 'id': 1,
+ 'name': ' ',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 2,
+ 'name': 'black bishop',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 3,
+ 'name': 'black king',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 4,
+ 'name': 'black knight',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 5,
+ 'name': 'black pawn',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 6,
+ 'name': 'black queen',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 7,
+ 'name': 'black rook',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 8,
+ 'name': 'white bishop',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 9,
+ 'name': 'white king',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 10,
+ 'name': 'white knight',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 11,
+ 'name': 'white pawn',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 12,
+ 'name': 'white queen',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 13,
+ 'name': 'white rook',
+ 'supercategory': 'pieces'
+ }]
+
+ _data_root = args.data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/'
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = ChessPieces
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+ CottontailRabbits = [{
+ 'id': 1,
+ 'name': 'rabbit',
+ 'supercategory': 'Cottontail-Rabbit'
+ }]
+
+ _data_root = args.data_root + 'CottontailRabbits/'
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = CottontailRabbits
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+ NorthAmericaMushrooms = [{
+ 'id': 1,
+ 'name': 'flat mushroom',
+ 'supercategory': 'mushroom'
+ }, {
+ 'id': 2,
+ 'name': 'yellow mushroom',
+ 'supercategory': 'mushroom'
+ }]
+
+ _data_root = args.data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = NorthAmericaMushrooms
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+
+if __name__ == '__main__':
+ main()
diff --git a/grounding-dino/mmdetection/configs/gn+ws/README.md b/grounding-dino/mmdetection/configs/gn+ws/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ef8cfc812c40712db9006f7c25d0d3a1f1a8a12c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/README.md
@@ -0,0 +1,54 @@
+# GN + WS
+
+> [Weight Standardization](https://arxiv.org/abs/1903.10520)
+
+
+
+## Abstract
+
+Batch Normalization (BN) has become an out-of-box technique to improve deep network training. However, its effectiveness is limited for micro-batch training, i.e., each GPU typically has only 1-2 images for training, which is inevitable for many computer vision tasks, e.g., object detection and semantic segmentation, constrained by memory consumption. To address this issue, we propose Weight Standardization (WS) and Batch-Channel Normalization (BCN) to bring two success factors of BN into micro-batch training: 1) the smoothing effects on the loss landscape and 2) the ability to avoid harmful elimination singularities along the training trajectory. WS standardizes the weights in convolutional layers to smooth the loss landscape by reducing the Lipschitz constants of the loss and the gradients; BCN combines batch and channel normalizations and leverages estimated statistics of the activations in convolutional layers to keep networks away from elimination singularities. We validate WS and BCN on comprehensive computer vision tasks, including image classification, object detection, instance segmentation, video recognition and semantic segmentation. All experimental results consistently show that WS and BCN improve micro-batch training significantly. Moreover, using WS and BCN with micro-batch training is even able to match or outperform the performances of BN with large-batch training.
+
+
+ +
+
+
+## Results and Models
+
+Faster R-CNN
+
+| Backbone | Style | Normalization | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----------: | :-----: | :------: | :------------: | :----: | :-----: | :---------------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | GN+WS | 1x | 5.9 | 11.7 | 39.7 | - | [config](./faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r50_fpn_gn_ws-all_1x_coco/faster_rcnn_r50_fpn_gn_ws-all_1x_coco_20200130-613d9fe2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r50_fpn_gn_ws-all_1x_coco/faster_rcnn_r50_fpn_gn_ws-all_1x_coco_20200130_210936.log.json) |
+| R-101-FPN | pytorch | GN+WS | 1x | 8.9 | 9.0 | 41.7 | - | [config](./faster-rcnn_r101_fpn_gn-ws-all_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r101_fpn_gn_ws-all_1x_coco/faster_rcnn_r101_fpn_gn_ws-all_1x_coco_20200205-a93b0d75.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r101_fpn_gn_ws-all_1x_coco/faster_rcnn_r101_fpn_gn_ws-all_1x_coco_20200205_232146.log.json) |
+| X-50-32x4d-FPN | pytorch | GN+WS | 1x | 7.0 | 10.3 | 40.7 | - | [config](./faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco_20200203-839c5d9d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco_20200203_220113.log.json) |
+| X-101-32x4d-FPN | pytorch | GN+WS | 1x | 10.8 | 7.6 | 42.1 | - | [config](./faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco_20200212-27da1bc2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco_20200212_195302.log.json) |
+
+Mask R-CNN
+
+| Backbone | Style | Normalization | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----------: | :-------: | :------: | :------------: | :----: | :-----: | :--------------------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | GN+WS | 2x | 7.3 | 10.5 | 40.6 | 36.6 | [config](./mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_2x_coco/mask_rcnn_r50_fpn_gn_ws-all_2x_coco_20200226-16acb762.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_2x_coco/mask_rcnn_r50_fpn_gn_ws-all_2x_coco_20200226_062128.log.json) |
+| R-101-FPN | pytorch | GN+WS | 2x | 10.3 | 8.6 | 42.0 | 37.7 | [config](./mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_2x_coco/mask_rcnn_r101_fpn_gn_ws-all_2x_coco_20200212-ea357cd9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_2x_coco/mask_rcnn_r101_fpn_gn_ws-all_2x_coco_20200212_213627.log.json) |
+| X-50-32x4d-FPN | pytorch | GN+WS | 2x | 8.4 | 9.3 | 41.1 | 37.0 | [config](./mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco_20200216-649fdb6f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco_20200216_201500.log.json) |
+| X-101-32x4d-FPN | pytorch | GN+WS | 2x | 12.2 | 7.1 | 42.1 | 37.9 | [config](./mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco_20200319-33fb95b5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco_20200319_104101.log.json) |
+| R-50-FPN | pytorch | GN+WS | 20-23-24e | 7.3 | - | 41.1 | 37.1 | [config](./mask-rcnn_r50_fpn_gn-ws-all_20-23-24e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco_20200213-487d1283.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco_20200213_035123.log.json) |
+| R-101-FPN | pytorch | GN+WS | 20-23-24e | 10.3 | - | 43.1 | 38.6 | [config](./mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco_20200213-57b5a50f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco_20200213_130142.log.json) |
+| X-50-32x4d-FPN | pytorch | GN+WS | 20-23-24e | 8.4 | - | 42.1 | 38.0 | [config](./mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200226-969bcb2c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200226_093732.log.json) |
+| X-101-32x4d-FPN | pytorch | GN+WS | 20-23-24e | 12.2 | - | 42.7 | 38.5 | [config](./mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200316-e6cd35ef.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200316_013741.log.json) |
+
+Note:
+
+- GN+WS requires about 5% more memory than GN, and it is only 5% slower than GN.
+- In the paper, a 20-23-24e lr schedule is used instead of 2x.
+- The X-50-GN and X-101-GN pretrained models are also shared by the authors.
+
+## Citation
+
+```latex
+@article{weightstandardization,
+ author = {Siyuan Qiao and Huiyu Wang and Chenxi Liu and Wei Shen and Alan Yuille},
+ title = {Weight Standardization},
+ journal = {arXiv preprint arXiv:1903.10520},
+ year = {2019},
+}
+```
diff --git a/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r101_fpn_gn-ws-all_1x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r101_fpn_gn-ws-all_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a4cb8281ac6d4b43a615ba1a05903770d8ee2f69
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r101_fpn_gn-ws-all_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://jhu/resnet101_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1a044c99a2e84de71822edb62543570891141b25
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://jhu/resnet50_gn_ws')),
+ neck=dict(conv_cfg=conv_cfg, norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg)))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b2a317d2ac830d95788084eaa8d374838b34a365
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py'
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://jhu/resnext101_32x4d_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dd75a2c004b8cc04411d47d8b9db6ba0ec4ffcb0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py'
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=50,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://jhu/resnext50_32x4d_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1815e3f85b9fd5d7204b08cd60a13980a382fd51
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 23],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5de37dee5e86e202c211464eaa08dd295dba44b2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://jhu/resnet101_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_20-23-24e_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_20-23-24e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..287c652045d6230411043f2abab34be4f6106687
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_20-23-24e_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 23],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ed8b1b73fe8695fc6bbb4054405192fca995cf81
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py
@@ -0,0 +1,33 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://jhu/resnet50_gn_ws')),
+ neck=dict(conv_cfg=conv_cfg, norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg),
+ mask_head=dict(conv_cfg=conv_cfg, norm_cfg=norm_cfg)))
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8ce9193579b914f8dc0804cb73c3d8e41b153655
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 23],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..bcfc371e774470ede7d171b4268db919385775ab
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py
@@ -0,0 +1,19 @@
+_base_ = './mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py'
+# model settings
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://jhu/resnext101_32x4d_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..af9ea5ab476b8ea3247062261726bef6b6bc1b0c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 23],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ab2b14042e9510ab14698e7a64c68d6ff60835e1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py
@@ -0,0 +1,19 @@
+_base_ = './mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py'
+# model settings
+conv_cfg = dict(type='ConvWS')
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=50,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ conv_cfg=conv_cfg,
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://jhu/resnext50_32x4d_gn_ws')))
diff --git a/grounding-dino/mmdetection/configs/gn+ws/metafile.yml b/grounding-dino/mmdetection/configs/gn+ws/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..89b91072924a31e53db1e95df30b47636a67b74b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn+ws/metafile.yml
@@ -0,0 +1,263 @@
+Collections:
+ - Name: Weight Standardization
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Group Normalization
+ - Weight Standardization
+ Paper:
+ URL: https://arxiv.org/abs/1903.10520
+ Title: 'Weight Standardization'
+ README: configs/gn+ws/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/configs/gn%2Bws/mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py
+ Version: v2.0.0
+
+Models:
+ - Name: faster-rcnn_r50_fpn_gn_ws-all_1x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/faster-rcnn_r50_fpn_gn-ws-all_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.9
+ inference time (ms/im):
+ - value: 85.47
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r50_fpn_gn_ws-all_1x_coco/faster_rcnn_r50_fpn_gn_ws-all_1x_coco_20200130-613d9fe2.pth
+
+ - Name: faster-rcnn_r101_fpn_gn-ws-all_1x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/faster-rcnn_r101_fpn_gn-ws-all_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.9
+ inference time (ms/im):
+ - value: 111.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_r101_fpn_gn_ws-all_1x_coco/faster_rcnn_r101_fpn_gn_ws-all_1x_coco_20200205-a93b0d75.pth
+
+ - Name: faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/faster-rcnn_x50-32x4d_fpn_gn-ws-all_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 97.09
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x50_32x4d_fpn_gn_ws-all_1x_coco_20200203-839c5d9d.pth
+
+ - Name: faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/faster-rcnn_x101-32x4d_fpn_gn-ws-all_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.8
+ inference time (ms/im):
+ - value: 131.58
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco/faster_rcnn_x101_32x4d_fpn_gn_ws-all_1x_coco_20200212-27da1bc2.pth
+
+ - Name: mask-rcnn_r50_fpn_gn_ws-all_2x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_r50_fpn_gn-ws-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.3
+ inference time (ms/im):
+ - value: 95.24
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_2x_coco/mask_rcnn_r50_fpn_gn_ws-all_2x_coco_20200226-16acb762.pth
+
+ - Name: mask-rcnn_r101_fpn_gn-ws-all_2x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_r101_fpn_gn-ws-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ inference time (ms/im):
+ - value: 116.28
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_2x_coco/mask_rcnn_r101_fpn_gn_ws-all_2x_coco_20200212-ea357cd9.pth
+
+ - Name: mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 8.4
+ inference time (ms/im):
+ - value: 107.53
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_2x_coco_20200216-649fdb6f.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 12.2
+ inference time (ms/im):
+ - value: 140.85
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_2x_coco_20200319-33fb95b5.pth
+
+ - Name: mask-rcnn_r50_fpn_gn_ws-all_20_23_24e_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_r50_fpn_gn-ws-all_20-23-24e_coco.py
+ Metadata:
+ Training Memory (GB): 7.3
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r50_fpn_gn_ws-all_20_23_24e_coco_20200213-487d1283.pth
+
+ - Name: mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_r101_fpn_gn-ws-all_20-23-24e_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_r101_fpn_gn_ws-all_20_23_24e_coco_20200213-57b5a50f.pth
+
+ - Name: mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_x50-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
+ Metadata:
+ Training Memory (GB): 8.4
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x50_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200226-969bcb2c.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco
+ In Collection: Weight Standardization
+ Config: configs/gn%2Bws/mask-rcnn_x101-32x4d_fpn_gn-ws-all_20-23-24e_coco.py
+ Metadata:
+ Training Memory (GB): 12.2
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn%2Bws/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco/mask_rcnn_x101_32x4d_fpn_gn_ws-all_20_23_24e_coco_20200316-e6cd35ef.pth
diff --git a/grounding-dino/mmdetection/configs/gn/README.md b/grounding-dino/mmdetection/configs/gn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1bc8192f24a56b11449944fc3d949302dfa781b6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/README.md
@@ -0,0 +1,41 @@
+# GN
+
+> [Group Normalization](https://arxiv.org/abs/1803.08494)
+
+
+
+## Abstract
+
+Batch Normalization (BN) is a milestone technique in the development of deep learning, enabling various networks to train. However, normalizing along the batch dimension introduces problems --- BN's error increases rapidly when the batch size becomes smaller, caused by inaccurate batch statistics estimation. This limits BN's usage for training larger models and transferring features to computer vision tasks including detection, segmentation, and video, which require small batches constrained by memory consumption. In this paper, we present Group Normalization (GN) as a simple alternative to BN. GN divides the channels into groups and computes within each group the mean and variance for normalization. GN's computation is independent of batch sizes, and its accuracy is stable in a wide range of batch sizes. On ResNet-50 trained in ImageNet, GN has 10.6% lower error than its BN counterpart when using a batch size of 2; when using typical batch sizes, GN is comparably good with BN and outperforms other normalization variants. Moreover, GN can be naturally transferred from pre-training to fine-tuning. GN can outperform its BN-based counterparts for object detection and segmentation in COCO, and for video classification in Kinetics, showing that GN can effectively replace the powerful BN in a variety of tasks. GN can be easily implemented by a few lines of code in modern libraries.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | model | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-----------: | :--------: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN (d) | Mask R-CNN | 2x | 7.1 | 11.0 | 40.2 | 36.4 | [config](./mask-rcnn_r50_fpn_gn-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_2x_coco/mask_rcnn_r50_fpn_gn-all_2x_coco_20200206-8eee02a6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_2x_coco/mask_rcnn_r50_fpn_gn-all_2x_coco_20200206_050355.log.json) |
+| R-50-FPN (d) | Mask R-CNN | 3x | 7.1 | - | 40.5 | 36.7 | [config](./mask-rcnn_r50_fpn_gn-all_3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_3x_coco/mask_rcnn_r50_fpn_gn-all_3x_coco_20200214-8b23b1e5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_3x_coco/mask_rcnn_r50_fpn_gn-all_3x_coco_20200214_063512.log.json) |
+| R-101-FPN (d) | Mask R-CNN | 2x | 9.9 | 9.0 | 41.9 | 37.6 | [config](./mask-rcnn_r101_fpn_gn-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_2x_coco/mask_rcnn_r101_fpn_gn-all_2x_coco_20200205-d96b1b50.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_2x_coco/mask_rcnn_r101_fpn_gn-all_2x_coco_20200205_234402.log.json) |
+| R-101-FPN (d) | Mask R-CNN | 3x | 9.9 | | 42.1 | 38.0 | [config](./mask-rcnn_r101_fpn_gn-all_3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_3x_coco/mask_rcnn_r101_fpn_gn-all_3x_coco_20200513_181609-0df864f4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_3x_coco/mask_rcnn_r101_fpn_gn-all_3x_coco_20200513_181609.log.json) |
+| R-50-FPN (c) | Mask R-CNN | 2x | 7.1 | 10.9 | 40.0 | 36.1 | [config](./mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco_20200207-20d3e849.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco_20200207_225832.log.json) |
+| R-50-FPN (c) | Mask R-CNN | 3x | 7.1 | - | 40.1 | 36.2 | [config](./mask-rcnn_r50-contrib_fpn_gn-all_3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco_20200225-542aefbc.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco_20200225_235135.log.json) |
+
+**Notes:**
+
+- (d) means pretrained model converted from Detectron, and (c) means the contributed model pretrained by [@thangvubk](https://github.com/thangvubk).
+- The `3x` schedule is epoch \[28, 34, 36\].
+- **Memory, Train/Inf time is outdated.**
+
+## Citation
+
+```latex
+@inproceedings{wu2018group,
+ title={Group Normalization},
+ author={Wu, Yuxin and He, Kaiming},
+ booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
+ year={2018}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..54f57d8d0855d07c696907d8c7c0758e4c13a573
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_2x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './mask-rcnn_r50_fpn_gn-all_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet101_gn')))
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_3x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a94e063ecd2a5e2fd83eb78aa4d7ddd8f51e2b9e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r101_fpn_gn-all_3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './mask-rcnn_r101_fpn_gn-all_2x_coco.py'
+
+# learning policy
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5515ec14a47a0dfa58acf6c46bc40d77ce39ac3d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py
@@ -0,0 +1,31 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://contrib/resnet50_gn')),
+ neck=dict(norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg),
+ mask_head=dict(norm_cfg=norm_cfg)))
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_3x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e6f7a97e8e0482836b225e832be2e3de4ae99947
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py'
+
+# learning policy
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_2x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1313b22e4795239d5148fb8d665cdadb5fac8e4f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_2x_coco.py
@@ -0,0 +1,36 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ norm_cfg=norm_cfg,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet50_gn')),
+ neck=dict(norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg),
+ mask_head=dict(norm_cfg=norm_cfg)))
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_3x_coco.py b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e425de951bb0419d1d1596e45637be1d914a8034
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/mask-rcnn_r50_fpn_gn-all_3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './mask-rcnn_r50_fpn_gn-all_2x_coco.py'
+
+# learning policy
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/gn/metafile.yml b/grounding-dino/mmdetection/configs/gn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9781dc9393f17b89a8e4228ef905a06dfdbc7eb5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/gn/metafile.yml
@@ -0,0 +1,162 @@
+Collections:
+ - Name: Group Normalization
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Group Normalization
+ Paper:
+ URL: https://arxiv.org/abs/1803.08494
+ Title: 'Group Normalization'
+ README: configs/gn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/configs/gn/mask-rcnn_r50_fpn_gn-all_2x_coco.py
+ Version: v2.0.0
+
+Models:
+ - Name: mask-rcnn_r50_fpn_gn-all_2x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r50_fpn_gn-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 90.91
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_2x_coco/mask_rcnn_r50_fpn_gn-all_2x_coco_20200206-8eee02a6.pth
+
+ - Name: mask-rcnn_r50_fpn_gn-all_3x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r50_fpn_gn-all_3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 90.91
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_3x_coco/mask_rcnn_r50_fpn_gn-all_3x_coco_20200214-8b23b1e5.pth
+
+ - Name: mask-rcnn_r101_fpn_gn-all_2x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r101_fpn_gn-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 9.9
+ inference time (ms/im):
+ - value: 111.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_2x_coco/mask_rcnn_r101_fpn_gn-all_2x_coco_20200205-d96b1b50.pth
+
+ - Name: mask-rcnn_r101_fpn_gn-all_3x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r101_fpn_gn-all_3x_coco.py
+ Metadata:
+ Training Memory (GB): 9.9
+ inference time (ms/im):
+ - value: 111.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r101_fpn_gn-all_3x_coco/mask_rcnn_r101_fpn_gn-all_3x_coco_20200513_181609-0df864f4.pth
+
+ - Name: mask-rcnn_r50_fpn_gn-all_contrib_2x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 91.74
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco/mask_rcnn_r50_fpn_gn-all_contrib_2x_coco_20200207-20d3e849.pth
+
+ - Name: mask-rcnn_r50_fpn_gn-all_contrib_3x_coco
+ In Collection: Group Normalization
+ Config: configs/gn/mask-rcnn_r50-contrib_fpn_gn-all_3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 91.74
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/gn/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco/mask_rcnn_r50_fpn_gn-all_contrib_3x_coco_20200225-542aefbc.pth
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/README.md b/grounding-dino/mmdetection/configs/grid_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..3de810afc66c29df6ab9bd1728d0cb8b57316acf
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/README.md
@@ -0,0 +1,47 @@
+# Grid R-CNN
+
+> [Grid R-CNN](https://arxiv.org/abs/1811.12030)
+
+
+
+## Abstract
+
+This paper proposes a novel object detection framework named Grid R-CNN, which adopts a grid guided localization mechanism for accurate object detection. Different from the traditional regression based methods, the Grid R-CNN captures the spatial information explicitly and enjoys the position sensitive property of fully convolutional architecture. Instead of using only two independent points, we design a multi-point supervision formulation to encode more clues in order to reduce the impact of inaccurate prediction of specific points. To take the full advantage of the correlation of points in a grid, we propose a two-stage information fusion strategy to fuse feature maps of neighbor grid points. The grid guided localization approach is easy to be extended to different state-of-the-art detection frameworks. Grid R-CNN leads to high quality object localization, and experiments demonstrate that it achieves a 4.1% AP gain at IoU=0.8 and a 10.0% AP gain at IoU=0.9 on COCO benchmark compared to Faster R-CNN with Res50 backbone and FPN architecture.
+
+Grid R-CNN is a well-performed objection detection framework. It transforms the traditional box offset regression problem into a grid point estimation problem. With the guidance of the grid points, it can obtain high-quality localization results. However, the speed of Grid R-CNN is not so satisfactory. In this technical report we present Grid R-CNN Plus, a better and faster version of Grid R-CNN. We have made several updates that significantly speed up the framework and simultaneously improve the accuracy. On COCO dataset, the Res50-FPN based Grid R-CNN Plus detector achieves an mAP of 40.4%, outperforming the baseline on the same model by 3.0 points with similar inference time.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :---------: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | 2x | 5.1 | 15.0 | 40.4 | [config](./grid-rcnn_r50_fpn_gn-head_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r50_fpn_gn-head_2x_coco/grid_rcnn_r50_fpn_gn-head_2x_coco_20200130-6cca8223.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r50_fpn_gn-head_2x_coco/grid_rcnn_r50_fpn_gn-head_2x_coco_20200130_221140.log.json) |
+| R-101 | 2x | 7.0 | 12.6 | 41.5 | [config](./grid-rcnn_r101_fpn_gn-head_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r101_fpn_gn-head_2x_coco/grid_rcnn_r101_fpn_gn-head_2x_coco_20200309-d6eca030.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r101_fpn_gn-head_2x_coco/grid_rcnn_r101_fpn_gn-head_2x_coco_20200309_164224.log.json) |
+| X-101-32x4d | 2x | 8.3 | 10.8 | 42.9 | [config](./grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco_20200130-d8f0e3ff.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco_20200130_215413.log.json) |
+| X-101-64x4d | 2x | 11.3 | 7.7 | 43.0 | [config](./grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco_20200204-ec76a754.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco_20200204_080641.log.json) |
+
+**Notes:**
+
+- All models are trained with 8 GPUs instead of 32 GPUs in the original paper.
+- The warming up lasts for 1 epoch and `2x` here indicates 25 epochs.
+
+## Citation
+
+```latex
+@inproceedings{lu2019grid,
+ title={Grid r-cnn},
+ author={Lu, Xin and Li, Buyu and Yue, Yuxin and Li, Quanquan and Yan, Junjie},
+ booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2019}
+}
+
+@article{lu2019grid,
+ title={Grid R-CNN Plus: Faster and Better},
+ author={Lu, Xin and Li, Buyu and Yue, Yuxin and Li, Quanquan and Yan, Junjie},
+ journal={arXiv preprint arXiv:1906.05688},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r101_fpn_gn-head_2x_coco.py b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r101_fpn_gn-head_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..46d41ed4ed5d1d6345e98434221cc5b07c60767d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r101_fpn_gn-head_2x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './grid-rcnn_r50_fpn_gn-head_2x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_1x_coco.py b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..358280630fa96e40ac7834cbda6b1ad3dc689c55
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_1x_coco.py
@@ -0,0 +1,19 @@
+_base_ = './grid-rcnn_r50_fpn_gn-head_2x_coco.py'
+
+# training schedule
+max_epochs = 12
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.0001, by_epoch=False, begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_2x_coco.py b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..228fca2323ceec2052a3835089d987a2643c53c1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_2x_coco.py
@@ -0,0 +1,160 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ type='GridRCNN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='GridRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ type='Shared2FCBBoxHead',
+ with_reg=False,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=False),
+ grid_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ grid_head=dict(
+ type='GridHead',
+ grid_points=9,
+ num_convs=8,
+ in_channels=256,
+ point_feat_channels=64,
+ norm_cfg=dict(type='GN', num_groups=36),
+ loss_grid=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=15))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_radius=1,
+ pos_weight=-1,
+ max_num_grid=192,
+ debug=False)),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.03,
+ nms=dict(type='nms', iou_threshold=0.3),
+ max_per_img=100)))
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001))
+
+# training schedule
+max_epochs = 25
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 80,
+ by_epoch=False,
+ begin=0,
+ end=3665),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[17, 23],
+ gamma=0.1)
+]
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dddf157beb6667887d0cd920cb2803e340d43183
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './grid-rcnn_r50_fpn_gn-head_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco.py b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e4ff50f546ae660cf398c2cb1c6f67ca20848c0f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/grid_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/grid_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..cee91e3b88e7bafa27e705713f2bc45d0dc872d0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grid_rcnn/metafile.yml
@@ -0,0 +1,101 @@
+Collections:
+ - Name: Grid R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RPN
+ - Dilated Convolution
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/1906.05688
+ Title: 'Grid R-CNN'
+ README: configs/grid_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/grid_rcnn.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: grid-rcnn_r50_fpn_gn-head_2x_coco
+ In Collection: Grid R-CNN
+ Config: configs/grid_rcnn/grid-rcnn_r50_fpn_gn-head_2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ inference time (ms/im):
+ - value: 66.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r50_fpn_gn-head_2x_coco/grid_rcnn_r50_fpn_gn-head_2x_coco_20200130-6cca8223.pth
+
+ - Name: grid-rcnn_r101_fpn_gn-head_2x_coco
+ In Collection: Grid R-CNN
+ Config: configs/grid_rcnn/grid-rcnn_r101_fpn_gn-head_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 79.37
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_r101_fpn_gn-head_2x_coco/grid_rcnn_r101_fpn_gn-head_2x_coco_20200309-d6eca030.pth
+
+ - Name: grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco
+ In Collection: Grid R-CNN
+ Config: configs/grid_rcnn/grid-rcnn_x101-32x4d_fpn_gn-head_2x_coco.py
+ Metadata:
+ Training Memory (GB): 8.3
+ inference time (ms/im):
+ - value: 92.59
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_32x4d_fpn_gn-head_2x_coco_20200130-d8f0e3ff.pth
+
+ - Name: grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco
+ In Collection: Grid R-CNN
+ Config: configs/grid_rcnn/grid-rcnn_x101-64x4d_fpn_gn-head_2x_coco.py
+ Metadata:
+ Training Memory (GB): 11.3
+ inference time (ms/im):
+ - value: 129.87
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/grid_rcnn/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco/grid_rcnn_x101_64x4d_fpn_gn-head_2x_coco_20200204-ec76a754.pth
diff --git a/grounding-dino/mmdetection/configs/groie/README.md b/grounding-dino/mmdetection/configs/groie/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..9792df93c1e9093d298467ee3037991c09fd1dae
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/README.md
@@ -0,0 +1,72 @@
+# GRoIE
+
+> [A novel Region of Interest Extraction Layer for Instance Segmentation](https://arxiv.org/abs/2004.13665)
+
+
+
+## Abstract
+
+Given the wide diffusion of deep neural network architectures for computer vision tasks, several new applications are nowadays more and more feasible. Among them, a particular attention has been recently given to instance segmentation, by exploiting the results achievable by two-stage networks (such as Mask R-CNN or Faster R-CNN), derived from R-CNN. In these complex architectures, a crucial role is played by the Region of Interest (RoI) extraction layer, devoted to extracting a coherent subset of features from a single Feature Pyramid Network (FPN) layer attached on top of a backbone.
+This paper is motivated by the need to overcome the limitations of existing RoI extractors which select only one (the best) layer from FPN. Our intuition is that all the layers of FPN retain useful information. Therefore, the proposed layer (called Generic RoI Extractor - GRoIE) introduces non-local building blocks and attention mechanisms to boost the performance.
+A comprehensive ablation study at component level is conducted to find the best set of algorithms and parameters for the GRoIE layer. Moreover, GRoIE can be integrated seamlessly with every two-stage architecture for both object detection and instance segmentation tasks. Therefore, the improvements brought about by the use of GRoIE in different state-of-the-art architectures are also evaluated. The proposed layer leads up to gain a 1.1% AP improvement on bounding box detection and 1.7% AP improvement on instance segmentation.
+
+
+
+ +
+
+
+## Introduction
+
+By Leonardo Rossi, Akbar Karimi and Andrea Prati from
+[IMPLab](http://implab.ce.unipr.it/).
+
+We provide configs to reproduce the results in the paper for
+"*A novel Region of Interest Extraction Layer for Instance Segmentation*"
+on COCO object detection.
+
+This paper is motivated by the need to overcome to the limitations of existing
+RoI extractors which select only one (the best) layer from FPN.
+
+Our intuition is that all the layers of FPN retain useful information.
+
+Therefore, the proposed layer (called Generic RoI Extractor - **GRoIE**)
+introduces non-local building blocks and attention mechanisms to boost the
+performance.
+
+## Results and Models
+
+The results on COCO 2017 minival (5k images) are shown in the below table.
+
+### Application of GRoIE to different architectures
+
+| Backbone | Method | Lr schd | box AP | mask AP | Config | Download |
+| :-------: | :-------------: | :-----: | :----: | :-----: | :------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | Faster Original | 1x | 37.4 | | [config](../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130_204655.log.json) |
+| R-50-FPN | + GRoIE | 1x | 38.3 | | [config](./faste-rcnn_r50_fpn_groie_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/groie/faster_rcnn_r50_fpn_groie_1x_coco/faster_rcnn_r50_fpn_groie_1x_coco_20200604_211715-66ee9516.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/groie/faster_rcnn_r50_fpn_groie_1x_coco/faster_rcnn_r50_fpn_groie_1x_coco_20200604_211715.log.json) |
+| R-50-FPN | Grid R-CNN | 1x | 39.1 | | [config](./grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/groie/grid_rcnn_r50_fpn_gn-head_groie_1x_coco/grid_rcnn_r50_fpn_gn-head_groie_1x_coco_20200605_202059-4b75d86f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/groie/grid_rcnn_r50_fpn_gn-head_groie_1x_coco/grid_rcnn_r50_fpn_gn-head_groie_1x_coco_20200605_202059.log.json) |
+| R-50-FPN | + GRoIE | 1x | | | [config](./grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py) | |
+| R-50-FPN | Mask R-CNN | 1x | 38.2 | 34.7 | [config](../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205_050542.log.json) |
+| R-50-FPN | + GRoIE | 1x | 39.0 | 36.0 | [config](./mask-rcnn_r50_fpn_groie_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_groie_1x_coco/mask_rcnn_r50_fpn_groie_1x_coco_20200604_211715-50d90c74.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_groie_1x_coco/mask_rcnn_r50_fpn_groie_1x_coco_20200604_211715.log.json) |
+| R-50-FPN | GC-Net | 1x | 40.7 | 36.5 | [config](../gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200202-50b90e5c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200202_085547.log.json) |
+| R-50-FPN | + GRoIE | 1x | 41.0 | 37.8 | [config](./mask-rcnn_r50_fpn_syncbn-r4-gcb-c3-c5-groie_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200604_211715-42eb79e1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200604_211715-42eb79e1.pth) |
+| R-101-FPN | GC-Net | 1x | 42.2 | 37.8 | [config](../gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200206-8407a3f0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/gcnet/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_1x_coco_20200206_142508.log.json) |
+| R-101-FPN | + GRoIE | 1x | 42.6 | 38.7 | [config](./mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200607_224507-8daae01c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200607_224507.log.json) |
+
+## Citation
+
+If you use this work or benchmark in your research, please cite this project.
+
+```latex
+@inproceedings{rossi2021novel,
+ title={A novel region of interest extraction layer for instance segmentation},
+ author={Rossi, Leonardo and Karimi, Akbar and Prati, Andrea},
+ booktitle={2020 25th International Conference on Pattern Recognition (ICPR)},
+ pages={2203--2209},
+ year={2021},
+ organization={IEEE}
+}
+```
+
+## Contact
+
+The implementation of GRoIE is currently maintained by
+[Leonardo Rossi](https://github.com/hachreak/).
diff --git a/grounding-dino/mmdetection/configs/groie/faste-rcnn_r50_fpn_groie_1x_coco.py b/grounding-dino/mmdetection/configs/groie/faste-rcnn_r50_fpn_groie_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0fbe8a32c3a81e9b312a02f79f3495171387d9f0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/faste-rcnn_r50_fpn_groie_1x_coco.py
@@ -0,0 +1,25 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='sum',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2))))
diff --git a/grounding-dino/mmdetection/configs/groie/grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py b/grounding-dino/mmdetection/configs/groie/grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dadccb79c2288f16eb4a1fa33269e4a8f5a55c9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = '../grid_rcnn/grid-rcnn_r50_fpn_gn-head_1x_coco.py'
+# model settings
+model = dict(
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='sum',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2)),
+ grid_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2))))
diff --git a/grounding-dino/mmdetection/configs/groie/mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco.py b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5699b4284a76fe633afd81acb0b047a81df6afd2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = '../gcnet/mask-rcnn_r101-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py'
+# model settings
+model = dict(
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='sum',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2)),
+ mask_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2))))
diff --git a/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_groie_1x_coco.py b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_groie_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4c9521e2f5730b74efc51f2051f861bfe5f8192d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_groie_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='sum',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2)),
+ mask_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2))))
diff --git a/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_syncbn-r4-gcb-c3-c5-groie_1x_coco.py b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_syncbn-r4-gcb-c3-c5-groie_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..22e97b6959a0bd13ae4432c806c61ca3d899f9ea
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/mask-rcnn_r50_fpn_syncbn-r4-gcb-c3-c5-groie_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = '../gcnet/mask-rcnn_r50-syncbn-gcb-r4-c3-c5_fpn_1x_coco.py'
+# model settings
+model = dict(
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='sum',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2)),
+ mask_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32],
+ pre_cfg=dict(
+ type='ConvModule',
+ in_channels=256,
+ out_channels=256,
+ kernel_size=5,
+ padding=2,
+ inplace=False,
+ ),
+ post_cfg=dict(
+ type='GeneralizedAttention',
+ in_channels=256,
+ spatial_range=-1,
+ num_heads=6,
+ attention_type='0100',
+ kv_stride=2))))
diff --git a/grounding-dino/mmdetection/configs/groie/metafile.yml b/grounding-dino/mmdetection/configs/groie/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ce957004719cb542a51c48e7e07a3d94d6bdee18
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/groie/metafile.yml
@@ -0,0 +1,94 @@
+Collections:
+ - Name: GRoIE
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Generic RoI Extractor
+ - FPN
+ - RPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/2004.13665
+ Title: 'A novel Region of Interest Extraction Layer for Instance Segmentation'
+ README: configs/groie/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/roi_heads/roi_extractors/groie.py#L15
+ Version: v2.1.0
+
+Models:
+ - Name: faster-rcnn_r50_fpn_groie_1x_coco
+ In Collection: GRoIE
+ Config: configs/groie/faste-rcnn_r50_fpn_groie_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/groie/faster_rcnn_r50_fpn_groie_1x_coco/faster_rcnn_r50_fpn_groie_1x_coco_20200604_211715-66ee9516.pth
+
+ - Name: grid-rcnn_r50_fpn_gn-head-groie_1x_coco
+ In Collection: GRoIE
+ Config: configs/groie/grid-rcnn_r50_fpn_gn-head-groie_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/groie/grid_rcnn_r50_fpn_gn-head_groie_1x_coco/grid_rcnn_r50_fpn_gn-head_groie_1x_coco_20200605_202059-4b75d86f.pth
+
+ - Name: mask-rcnn_r50_fpn_groie_1x_coco
+ In Collection: GRoIE
+ Config: configs/groie/mask-rcnn_r50_fpn_groie_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_groie_1x_coco/mask_rcnn_r50_fpn_groie_1x_coco_20200604_211715-50d90c74.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco
+ In Collection: GRoIE
+ Config: configs/groie/mask-rcnn_r50_fpn_syncbn-r4-gcb-c3-c5-groie_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r50_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200604_211715-42eb79e1.pth
+
+ - Name: mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco
+ In Collection: GRoIE
+ Config: configs/groie/mask-rcnn_r101_fpn_syncbn-r4-gcb_c3-c5-groie_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/groie/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco/mask_rcnn_r101_fpn_syncbn-backbone_r4_gcb_c3-c5_groie_1x_coco_20200607_224507-8daae01c.pth
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/README.md b/grounding-dino/mmdetection/configs/grounding_dino/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..2a527828a467df069bbdbe624b55c1afcaa3521f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/README.md
@@ -0,0 +1,317 @@
+# Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection
+
+[Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection](https://arxiv.org/abs/2303.05499)
+
+
+
+## Abstract
+
+In this paper, we present an open-set object detector, called Grounding DINO, by marrying Transformer-based detector DINO with grounded pre-training, which can detect arbitrary objects with human inputs such as category names or referring expressions. The key solution of open-set object detection is introducing language to a closed-set detector for open-set concept generalization. To effectively fuse language and vision modalities, we conceptually divide a closed-set detector into three phases and propose a tight fusion solution, which includes a feature enhancer, a language-guided query selection, and a cross-modality decoder for cross-modality fusion. While previous works mainly evaluate open-set object detection on novel categories, we propose to also perform evaluations on referring expression comprehension for objects specified with attributes. Grounding DINO performs remarkably well on all three settings, including benchmarks on COCO, LVIS, ODinW, and RefCOCO/+/g. Grounding DINO achieves a 52.5 AP on the COCO detection zero-shot transfer benchmark, i.e., without any training data from COCO. It sets a new record on the ODinW zero-shot benchmark with a mean 26.1 AP.
+
+
+
+ +
+
+
+## Installation
+
+```shell
+cd $MMDETROOT
+
+# source installation
+pip install -r requirements/multimodal.txt
+
+# or mim installation
+mim install mmdet[multimodal]
+```
+
+## NOTE
+
+Grounding DINO utilizes BERT as the language model, which requires access to https://huggingface.co/. If you encounter connection errors due to network access, you can download the required files on a computer with internet access and save them locally. Finally, modify the `lang_model_name` field in the config to the local path. Please refer to the following code:
+
+```python
+from transformers import BertConfig, BertModel
+from transformers import AutoTokenizer
+
+config = BertConfig.from_pretrained("bert-base-uncased")
+model = BertModel.from_pretrained("bert-base-uncased", add_pooling_layer=False, config=config)
+tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased")
+
+config.save_pretrained("your path/bert-base-uncased")
+model.save_pretrained("your path/bert-base-uncased")
+tokenizer.save_pretrained("your path/bert-base-uncased")
+```
+
+## Inference
+
+```
+cd $MMDETROOT
+
+wget https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth
+
+python demo/image_demo.py \
+ demo/demo.jpg \
+ configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py \
+ --weights groundingdino_swint_ogc_mmdet-822d7e9d.pth \
+ --texts 'bench . car .'
+```
+
+
+ +
+
+
+## COCO Results and Models
+
+| Model | Backbone | Style | COCO mAP | Official COCO mAP | Pre-Train Data | Config | Download |
+| :----------------: | :------: | :-------: | :--------: | :---------------: | :----------------------------------------------: | :------------------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Grounding DINO-T | Swin-T | Zero-shot | 48.5 | 48.4 | O365,GoldG,Cap4M | [config](grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth) |
+| Grounding DINO-T | Swin-T | Finetune | 58.1(+0.9) | 57.2 | O365,GoldG,Cap4M | [config](grounding_dino_swin-t_finetune_16xb2_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco/grounding_dino_swin-t_finetune_16xb2_1x_coco_20230921_152544-5f234b20.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco/grounding_dino_swin-t_finetune_16xb2_1x_coco_20230921_152544.log.json) |
+| Grounding DINO-B | Swin-B | Zero-shot | 56.9 | 56.7 | COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO | [config](grounding_dino_swin-b_pretrain_mixeddata.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swinb_cogcoor_mmdet-55949c9c.pth) |
+| Grounding DINO-B | Swin-B | Finetune | 59.7 | | COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO | [config](grounding_dino_swin-b_finetune_16xb2_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco/grounding_dino_swin-b_finetune_16xb2_1x_coco_20230921_153201-f219e0c0.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco/grounding_dino_swin-b_finetune_16xb2_1x_coco_20230921_153201.log.json) |
+| Grounding DINO-R50 | R50 | Scratch | 48.9(+0.8) | 48.1 | | [config](grounding_dino_r50_scratch_8xb2_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco/grounding_dino_r50_scratch_1x_coco-fe0002f2.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco/20230922_114218.json) |
+
+Note:
+
+1. The weights corresponding to the zero-shot model are adopted from the official weights and converted using the [script](../../tools/model_converters/groundingdino_to_mmdet.py). We have not retrained the model for the time being.
+2. Finetune refers to fine-tuning on the COCO 2017 dataset. The R50 model is trained using 8 NVIDIA GeForce 3090 GPUs, while the remaining models are trained using 16 NVIDIA GeForce 3090 GPUs. The GPU memory usage is approximately 8.5GB.
+3. Our performance is higher than the official model due to two reasons: we modified the initialization strategy and introduced a log scaler.
+
+## LVIS Results
+
+| Model | MiniVal APr | MiniVal APc | MiniVal APf | MiniVal AP | Val1.0 APr | Val1.0 APc | Val1.0 APf | Val1.0 AP | Pre-Train Data | Config | Download |
+| :--------------: | :---------: | :---------: | :---------: | :--------: | :--------: | :--------: | :--------: | :-------: | :----------------------------------------------: | :-----------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------: |
+| Grounding DINO-T | 18.8 | 24.2 | 34.7 | 28.8 | 10.1 | 15.3 | 29.9 | 20.1 | O365,GoldG,Cap4M | [config](lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth) |
+| Grounding DINO-B | 27.9 | 33.4 | 37.2 | 34.7 | 19.0 | 24.1 | 32.9 | 26.7 | COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO | [config](lvis/grounding_dino_swin-b_pretrain_zeroshot_mini-lvis.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swinb_cogcoor_mmdet-55949c9c.pth) |
+
+Note:
+
+1. The above are zero-shot evaluation results.
+2. The evaluation metric we used is LVIS FixAP. For specific details, please refer to [Evaluating Large-Vocabulary Object Detectors: The Devil is in the Details](https://arxiv.org/pdf/2102.01066.pdf).
+
+## ODinW (Object Detection in the Wild) Results
+
+Learning visual representations from natural language supervision has recently shown great promise in a number of pioneering works. In general, these language-augmented visual models demonstrate strong transferability to a variety of datasets and tasks. However, it remains challenging to evaluate the transferablity of these models due to the lack of easy-to-use evaluation toolkits and public benchmarks. To tackle this, we build ELEVATER 1 , the first benchmark and toolkit for evaluating (pre-trained) language-augmented visual models. ELEVATER is composed of three components. (i) Datasets. As downstream evaluation suites, it consists of 20 image classification datasets and 35 object detection datasets, each of which is augmented with external knowledge. (ii) Toolkit. An automatic hyper-parameter tuning toolkit is developed to facilitate model evaluation on downstream tasks. (iii) Metrics. A variety of evaluation metrics are used to measure sample-efficiency (zero-shot and few-shot) and parameter-efficiency (linear probing and full model fine-tuning). ELEVATER is platform for Computer Vision in the Wild (CVinW), and is publicly released at https://computer-vision-in-the-wild.github.io/ELEVATER/
+
+### Results and models of ODinW13
+
+| Method | GLIP-T(A) | Official | GLIP-T(B) | Official | GLIP-T(C) | Official | GroundingDINO-T | GroundingDINO-B |
+| --------------------- | --------- | --------- | --------- | --------- | --------- | --------- | --------------- | --------------- |
+| AerialMaritimeDrone | 0.123 | 0.122 | 0.110 | 0.110 | 0.130 | 0.130 | 0.173 | 0.281 |
+| Aquarium | 0.175 | 0.174 | 0.173 | 0.169 | 0.191 | 0.190 | 0.195 | 0.445 |
+| CottontailRabbits | 0.686 | 0.686 | 0.688 | 0.688 | 0.744 | 0.744 | 0.799 | 0.808 |
+| EgoHands | 0.013 | 0.013 | 0.003 | 0.004 | 0.314 | 0.315 | 0.608 | 0.764 |
+| NorthAmericaMushrooms | 0.502 | 0.502 | 0.367 | 0.367 | 0.297 | 0.296 | 0.507 | 0.675 |
+| Packages | 0.589 | 0.589 | 0.083 | 0.083 | 0.699 | 0.699 | 0.687 | 0.670 |
+| PascalVOC | 0.512 | 0.512 | 0.541 | 0.540 | 0.565 | 0.565 | 0.563 | 0.711 |
+| pistols | 0.339 | 0.339 | 0.502 | 0.501 | 0.503 | 0.504 | 0.726 | 0.771 |
+| pothole | 0.007 | 0.007 | 0.030 | 0.030 | 0.058 | 0.058 | 0.215 | 0.478 |
+| Raccoon | 0.075 | 0.074 | 0.285 | 0.288 | 0.241 | 0.244 | 0.549 | 0.541 |
+| ShellfishOpenImages | 0.253 | 0.253 | 0.337 | 0.338 | 0.300 | 0.302 | 0.393 | 0.650 |
+| thermalDogsAndPeople | 0.372 | 0.372 | 0.475 | 0.475 | 0.510 | 0.510 | 0.657 | 0.633 |
+| VehiclesOpenImages | 0.574 | 0.566 | 0.562 | 0.547 | 0.549 | 0.534 | 0.613 | 0.647 |
+| Average | **0.325** | **0.324** | **0.320** | **0.318** | **0.392** | **0.392** | **0.514** | **0.621** |
+
+### Results and models of ODinW35
+
+| Method | GLIP-T(A) | Official | GLIP-T(B) | Official | GLIP-T(C) | Official | GroundingDINO-T | GroundingDINO-B |
+| --------------------------- | --------- | --------- | --------- | --------- | --------- | --------- | --------------- | --------------- |
+| AerialMaritimeDrone_large | 0.123 | 0.122 | 0.110 | 0.110 | 0.130 | 0.130 | 0.173 | 0.281 |
+| AerialMaritimeDrone_tiled | 0.174 | 0.174 | 0.172 | 0.172 | 0.172 | 0.172 | 0.206 | 0.364 |
+| AmericanSignLanguageLetters | 0.001 | 0.001 | 0.003 | 0.003 | 0.009 | 0.009 | 0.002 | 0.096 |
+| Aquarium | 0.175 | 0.175 | 0.173 | 0.171 | 0.192 | 0.182 | 0.195 | 0.445 |
+| BCCD | 0.016 | 0.016 | 0.001 | 0.001 | 0.000 | 0.000 | 0.161 | 0.584 |
+| boggleBoards | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.134 |
+| brackishUnderwater | 0.016 | 0..013 | 0.021 | 0.027 | 0.020 | 0.022 | 0.021 | 0.454 |
+| ChessPieces | 0.001 | 0.001 | 0.000 | 0.000 | 0.001 | 0.001 | 0.000 | 0.000 |
+| CottontailRabbits | 0.710 | 0.709 | 0.683 | 0.683 | 0.752 | 0.752 | 0.806 | 0.797 |
+| dice | 0.005 | 0.005 | 0.004 | 0.004 | 0.004 | 0.004 | 0.004 | 0.082 |
+| DroneControl | 0.016 | 0.017 | 0.006 | 0.008 | 0.005 | 0.007 | 0.042 | 0.638 |
+| EgoHands_generic | 0.009 | 0.010 | 0.005 | 0.006 | 0.510 | 0.508 | 0.608 | 0.764 |
+| EgoHands_specific | 0.001 | 0.001 | 0.004 | 0.006 | 0.003 | 0.004 | 0.002 | 0.687 |
+| HardHatWorkers | 0.029 | 0.029 | 0.023 | 0.023 | 0.033 | 0.033 | 0.046 | 0.439 |
+| MaskWearing | 0.007 | 0.007 | 0.003 | 0.002 | 0.005 | 0.005 | 0.004 | 0.406 |
+| MountainDewCommercial | 0.218 | 0.227 | 0.199 | 0.197 | 0.478 | 0.463 | 0.430 | 0.580 |
+| NorthAmericaMushrooms | 0.502 | 0.502 | 0.450 | 0.450 | 0.497 | 0.497 | 0.471 | 0.501 |
+| openPoetryVision | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.051 |
+| OxfordPets_by_breed | 0.001 | 0.002 | 0.002 | 0.004 | 0.001 | 0.002 | 0.003 | 0.799 |
+| OxfordPets_by_species | 0.016 | 0.011 | 0.012 | 0.009 | 0.013 | 0.009 | 0.011 | 0.872 |
+| PKLot | 0.002 | 0.002 | 0.000 | 0.000 | 0.000 | 0.000 | 0.001 | 0.774 |
+| Packages | 0.569 | 0.569 | 0.279 | 0.279 | 0.712 | 0.712 | 0.695 | 0.728 |
+| PascalVOC | 0.512 | 0.512 | 0.541 | 0.540 | 0.565 | 0.565 | 0.563 | 0.711 |
+| pistols | 0.339 | 0.339 | 0.502 | 0.501 | 0.503 | 0.504 | 0.726 | 0.771 |
+| plantdoc | 0.002 | 0.002 | 0.007 | 0.007 | 0.009 | 0.009 | 0.005 | 0.376 |
+| pothole | 0.007 | 0.010 | 0.024 | 0.025 | 0.085 | 0.101 | 0.215 | 0.478 |
+| Raccoons | 0.075 | 0.074 | 0.285 | 0.288 | 0.241 | 0.244 | 0.549 | 0.541 |
+| selfdrivingCar | 0.071 | 0.072 | 0.074 | 0.074 | 0.081 | 0.080 | 0.089 | 0.318 |
+| ShellfishOpenImages | 0.253 | 0.253 | 0.337 | 0.338 | 0.300 | 0.302 | 0.393 | 0.650 |
+| ThermalCheetah | 0.028 | 0.028 | 0.000 | 0.000 | 0.028 | 0.028 | 0.087 | 0.290 |
+| thermalDogsAndPeople | 0.372 | 0.372 | 0.475 | 0.475 | 0.510 | 0.510 | 0.657 | 0.633 |
+| UnoCards | 0.000 | 0.000 | 0.000 | 0.001 | 0.002 | 0.003 | 0.006 | 0.754 |
+| VehiclesOpenImages | 0.574 | 0.566 | 0.562 | 0.547 | 0.549 | 0.534 | 0.613 | 0.647 |
+| WildfireSmoke | 0.000 | 0.000 | 0.000 | 0.000 | 0.017 | 0.017 | 0.134 | 0.410 |
+| websiteScreenshots | 0.003 | 0.004 | 0.003 | 0.005 | 0.005 | 0.006 | 0.012 | 0.175 |
+| Average | **0.134** | **0.134** | **0.138** | **0.138** | **0.179** | **0.178** | **0.227** | **0.492** |
+
+## Flickr30k Results
+
+| Model | Pre-Train Data | Val R@1 | Val R@5 | Val R@10 | Tesst R@1 | Test R@5 | Test R@10 | Config | Download |
+| :--------------: | :--------------: | ------- | ------- | -------- | --------- | -------- | --------- | :-------------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Grounding DINO-T | O365,GoldG,Cap4M | 87.8 | 96.6 | 98.0 | 88.1 | 96.9 | 98.2 | [config](grounding_dino_swin-t_finetune_16xb2_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco/grounding_dino_swin-t_finetune_16xb2_1x_coco_20230921_152544-5f234b20.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco/grounding_dino_swin-t_finetune_16xb2_1x_coco_20230921_152544.log.json) |
+
+Note:
+
+1. `@1,5,10` refers to precision at the top 1, 5, and 10 positions in a predicted ranked list.
+2. The pretraining data used by Grounding DINO-T is `O365,GoldG,Cap4M`, and the corresponding evaluation configuration is (grounding_dino_swin-t_pretrain_zeroshot_refcoco)\[refcoco/grounding_dino_swin-t_pretrain_zeroshot_refcoco.py\].
+
+Test Command
+
+```shell
+cd mmdetection
+bash tools/dist_test.sh configs/grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_zeroshot_flickr30k.py checkpoints/groundingdino_swint_ogc_mmdet-822d7e9d.pth 8
+```
+
+## Referring Expression Comprehension Results
+
+| Method | Grounding DINO-T (O365,GoldG,Cap4M) | Grounding DINO-B
(COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO) | +| --------------------------------------- | ----------------------------------------- | ------------------------------------------------------------------------- | +| RefCOCO val @1,5,10 | 50.77/89.45/94.86 | 84.61/97.88/99.10 | +| RefCOCO testA @1,5,10 | 57.45/91.29/95.62 | 88.65/98.89/99.63 | +| RefCOCO testB @1,5,10 | 44.97/86.54/92.88 | 80.51/96.64/98.51 | +| RefCOCO+ val @1,5,10 | 51.64/86.35/92.57 | 73.67/96.60/98.65 | +| RefCOCO+ testA @1,5,10 | 57.25/86.74/92.65 | 82.19/97.92/99.09 | +| RefCOCO+ testB @1,5,10 | 46.35/84.05/90.67 | 64.10/94.25/97.46 | +| RefCOCOg val @1,5,10 | 60.42/92.10/96.18 | 78.33/97.28/98.57 | +| RefCOCOg test @1,5,10 | 59.74/92.08/96.28 | 78.11/97.06/98.65 | +| gRefCOCO val Pr@(F1=1, IoU≥0.5),N-acc | 41.32/91.82 | 46.18/81.44 | +| gRefCOCO testA Pr@(F1=1, IoU≥0.5),N-acc | 27.23/90.24 | 38.60/76.06 | +| gRefCOCO testB Pr@(F1=1, IoU≥0.5),N-acc | 29.70/93.49 | 35.87/80.58 | + +Note: + +1. `@1,5,10` refers to precision at the top 1, 5, and 10 positions in a predicted ranked list. +2. `Pr@(F1=1, IoU≥0.5),N-acc` from the paper [GREC: Generalized Referring Expression Comprehension](https://arxiv.org/pdf/2308.16182.pdf) +3. The pretraining data used by Grounding DINO-T is `O365,GoldG,Cap4M`, and the corresponding evaluation configuration is (grounding_dino_swin-t_pretrain_zeroshot_refcoco)\[refcoco/grounding_dino_swin-t_pretrain_zeroshot_refcoco.py\]. +4. The pretraining data used by Grounding DINO-B is `COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO`, and the corresponding evaluation configuration is (grounding_dino_swin-t_pretrain_zeroshot_refcoco)\[refcoco/grounding_dino_swin-b_pretrain_zeroshot_refcoco.py\]. + +Test Command + +```shell +cd mmdetection +./tools/dist_test.sh configs/grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth 8 +./tools/dist_test.sh configs/grounding_dino/refcoco/grounding_dino_swin-b_pretrain_zeroshot_refexp.py https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swinb_cogcoor_mmdet-55949c9c.pth 8 +``` + +## Description Detection Dataset + +```shell +pip install ddd-dataset +``` + +| Method | mode | Grounding DINO-T
(O365,GoldG,Cap4M) | Grounding DINO-B
(COCO,O365,GoldG,Cap4M,OpenImage,ODinW-35,RefCOCO) | +| -------------------------------- | -------- | ----------------------------------------- | ------------------------------------------------------------------------- | +| FULL/short/middle/long/very long | concat | 17.2/18.0/18.7/14.8/16.3 | 20.2/20.4/21.1/18.8/19.8 | +| FULL/short/middle/long/very long | parallel | 22.3/28.2/24.8/19.1/13.9 | 25.0/26.4/27.2/23.5/19.7 | +| PRES/short/middle/long/very long | concat | 17.8/18.3/19.2/15.2/17.3 | 20.7/21.7/21.4/19.1/20.3 | +| PRES/short/middle/long/very long | parallel | 21.0/27.0/22.8/17.5/12.5 | 23.7/25.8/25.1/21.9/19.3 | +| ABS/short/middle/long/very long | concat | 15.4/17.1/16.4/13.6/14.9 | 18.6/16.1/19.7/18.1/19.1 | +| ABS/short/middle/long/very long | parallel | 26.0/32.0/33.0/23.6/15.5 | 28.8/28.1/35.8/28.2/20.2 | + +Note: + +1. Considering that the evaluation time for Inter-scenario is very long and the performance is low, it is temporarily not supported. The mentioned metrics are for Intra-scenario. +2. `concat` is the default inference mode for Grounding DINO, where it concatenates multiple sub-sentences with "." to form a single sentence for inference. On the other hand, "parallel" performs inference on each sub-sentence in a for-loop. + +## Custom Dataset + +To facilitate fine-tuning on custom datasets, we use a simple cat dataset as an example, as shown in the following steps. + +### 1. Dataset Preparation + +```shell +cd mmdetection +wget https://download.openmmlab.com/mmyolo/data/cat_dataset.zip +unzip cat_dataset.zip -d data/cat/ +``` + +cat dataset is a single-category dataset with 144 images, which has been converted to coco format. + +
+ +
+
+
+### 2. Config Preparation
+
+Due to the simplicity and small number of cat datasets, we use 8 cards to train 20 epochs, scale the learning rate accordingly, and do not train the language model, only the visual model.
+
+The Details of the configuration can be found in [grounding_dino_swin-t_finetune_8xb2_20e_cat](grounding_dino_swin-t_finetune_8xb2_20e_cat.py)
+
+### 3. Visualization and Evaluation
+
+Due to the Grounding DINO is an open detection model, so it can be detected and evaluated even if it is not trained on the cat dataset.
+
+The single image visualization is as follows:
+
+```shell
+cd mmdetection
+python demo/image_demo.py data/cat/images/IMG_20211205_120756.jpg configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py --weights https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth --texts cat.
+```
+
+
+
+ +
+
+
+The test dataset evaluation on single card is as follows:
+
+```shell
+python tools/test.py configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth
+```
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.867
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.931
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.867
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.903
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.907
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.907
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.907
+```
+
+### 4. Model Training and Visualization
+
+```shell
+./tools/dist_train.sh configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py 8 --work-dir cat_work_dir
+```
+
+The model will be saved based on the best performance on the test set. The performance of the best model (at epoch 16) is as follows:
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.905
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.923
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.905
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.927
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.937
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.937
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.937
+```
+
+We can find that after fine-tuning training, the training of the cat dataset is increased from 86.7 to 90.5.
+
+If we do single image inference visualization again, the result is as follows:
+
+```shell
+cd mmdetection
+python demo/image_demo.py data/cat/images/IMG_20211205_120756.jpg configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py --weights cat_work_dir/best_coco_bbox_mAP_epoch_16.pth --texts cat.
+```
+
+
+ +
+
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/__pycache__/grounding_dino_swin-b_mydata.cpython-313.pyc b/grounding-dino/mmdetection/configs/grounding_dino/__pycache__/grounding_dino_swin-b_mydata.cpython-313.pyc
new file mode 100644
index 0000000000000000000000000000000000000000..55a837960b28bc34c445ee7408f817eb27e52167
Binary files /dev/null and b/grounding-dino/mmdetection/configs/grounding_dino/__pycache__/grounding_dino_swin-b_mydata.cpython-313.pyc differ
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_concat_dod.py b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_concat_dod.py
new file mode 100644
index 0000000000000000000000000000000000000000..ac655b74aa664ef912b6b1f509e4eb9341ccd62a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_concat_dod.py
@@ -0,0 +1,14 @@
+_base_ = 'grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py'
+
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_parallel_dod.py b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_parallel_dod.py
new file mode 100644
index 0000000000000000000000000000000000000000..9a1c8f2ac740c6c64a01a1a6a8f7dd57622bedf6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-b_pretrain_zeroshot_parallel_dod.py
@@ -0,0 +1,3 @@
+_base_ = 'grounding_dino_swin-b_pretrain_zeroshot_concat_dod.py'
+
+model = dict(test_cfg=dict(chunked_size=1))
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py
new file mode 100644
index 0000000000000000000000000000000000000000..bb418011bf489c259f3696589aa56c5b8296256c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py
@@ -0,0 +1,78 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py'
+
+data_root = 'data/d3/'
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile', backend_args=None,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities', 'sent_ids'))
+]
+
+# -------------------------------------------------#
+val_dataset_full = dict(
+ type='DODDataset',
+ data_root=data_root,
+ ann_file='d3_json/d3_full_annotations.json',
+ data_prefix=dict(img='d3_images/', anno='d3_pkl'),
+ pipeline=test_pipeline,
+ test_mode=True,
+ backend_args=None,
+ return_classes=True)
+
+val_evaluator_full = dict(
+ type='DODCocoMetric',
+ ann_file=data_root + 'd3_json/d3_full_annotations.json')
+
+# -------------------------------------------------#
+val_dataset_pres = dict(
+ type='DODDataset',
+ data_root=data_root,
+ ann_file='d3_json/d3_pres_annotations.json',
+ data_prefix=dict(img='d3_images/', anno='d3_pkl'),
+ pipeline=test_pipeline,
+ test_mode=True,
+ backend_args=None,
+ return_classes=True)
+val_evaluator_pres = dict(
+ type='DODCocoMetric',
+ ann_file=data_root + 'd3_json/d3_pres_annotations.json')
+
+# -------------------------------------------------#
+val_dataset_abs = dict(
+ type='DODDataset',
+ data_root=data_root,
+ ann_file='d3_json/d3_abs_annotations.json',
+ data_prefix=dict(img='d3_images/', anno='d3_pkl'),
+ pipeline=test_pipeline,
+ test_mode=True,
+ backend_args=None,
+ return_classes=True)
+val_evaluator_abs = dict(
+ type='DODCocoMetric',
+ ann_file=data_root + 'd3_json/d3_abs_annotations.json')
+
+# -------------------------------------------------#
+datasets = [val_dataset_full, val_dataset_pres, val_dataset_abs]
+dataset_prefixes = ['FULL', 'PRES', 'ABS']
+metrics = [val_evaluator_full, val_evaluator_pres, val_evaluator_abs]
+
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d680091162e5ac96c15c76b58a18764e85d3233
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py
@@ -0,0 +1,3 @@
+_base_ = 'grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py'
+
+model = dict(test_cfg=dict(chunked_size=1))
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_zeroshot_flickr30k.py b/grounding-dino/mmdetection/configs/grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_zeroshot_flickr30k.py
new file mode 100644
index 0000000000000000000000000000000000000000..c1996567588842f82c0af83e3a9ab84c81e7c25d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_zeroshot_flickr30k.py
@@ -0,0 +1,57 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py'
+
+dataset_type = 'Flickr30kDataset'
+data_root = 'data/flickr30k_entities/'
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile', backend_args=None,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities',
+ 'tokens_positive', 'phrase_ids', 'phrases'))
+]
+
+dataset_Flickr30k_val = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='final_flickr_separateGT_val.json',
+ data_prefix=dict(img='flickr30k_images/'),
+ pipeline=test_pipeline,
+)
+
+dataset_Flickr30k_test = dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='final_flickr_separateGT_test.json',
+ data_prefix=dict(img='flickr30k_images/'),
+ pipeline=test_pipeline,
+)
+
+val_evaluator_Flickr30k = dict(type='Flickr30kMetric')
+
+test_evaluator_Flickr30k = dict(type='Flickr30kMetric')
+
+# ----------Config---------- #
+dataset_prefixes = ['Flickr30kVal', 'Flickr30kTest']
+datasets = [dataset_Flickr30k_val, dataset_Flickr30k_test]
+metrics = [val_evaluator_Flickr30k, test_evaluator_Flickr30k]
+
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..623a29b87adfd6734e980e814766e873b2b89d05
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco.py
@@ -0,0 +1,208 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+lang_model_name = 'bert-base-uncased'
+
+model = dict(
+ type='GroundingDINO',
+ num_queries=900,
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=False,
+ ),
+ language_model=dict(
+ type='BertModel',
+ name=lang_model_name,
+ pad_to_max=False,
+ use_sub_sentence_represent=True,
+ special_tokens_list=['[CLS]', '[SEP]', '.', '?'],
+ add_pooling_layer=False,
+ ),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[512, 1024, 2048],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ bias=True,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ encoder=dict(
+ num_layers=6,
+ num_cp=6,
+ # visual layer config
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=4, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ # text layer config
+ text_layer_cfg=dict(
+ self_attn_cfg=dict(num_heads=4, embed_dims=256, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=1024, ffn_drop=0.0)),
+ # fusion layer config
+ fusion_layer_cfg=dict(
+ v_dim=256,
+ l_dim=256,
+ embed_dim=1024,
+ num_heads=4,
+ init_values=1e-4),
+ ),
+ decoder=dict(
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ # query self attention layer
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to text
+ cross_attn_text_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to image
+ cross_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128, normalize=True, offset=0.0, temperature=20),
+ bbox_head=dict(
+ type='GroundingDINOHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ contrastive_cfg=dict(max_text_len=256, log_scale='auto', bias=True),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0), # 2.0 in DeformDETR
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ dn_cfg=dict( # TODO: Move to model.train_cfg ?
+ label_noise_scale=0.5,
+ box_noise_scale=1.0, # 0.4 for DN-DETR
+ group_cfg=dict(dynamic=True, num_groups=None,
+ num_dn_queries=100)), # TODO: half num_dn_queries
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='BinaryFocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=300))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction', 'text',
+ 'custom_entities'))
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='FixScaleResize', scale=(800, 1333), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities'))
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False),
+ pipeline=train_pipeline,
+ return_classes=True))
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, return_classes=True))
+test_dataloader = val_dataloader
+
+# We did not adopt the official 24e optimizer strategy
+# because the results indicate that the current strategy is superior.
+optim_wrapper = dict(
+ _delete_=True,
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW',
+ lr=0.0001, # 0.0002 for DeformDETR
+ weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'backbone': dict(lr_mult=0.1)
+ }))
+# learning policy
+max_epochs = 12
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3554ee245ffe4312fc7f2cdd83755b1a0731aab9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = [
+ './grounding_dino_swin-t_finetune_16xb2_1x_coco.py',
+]
+
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swinb_cogcoor_mmdet-55949c9c.pth' # noqa
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_mydata.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_mydata.py
new file mode 100644
index 0000000000000000000000000000000000000000..224c45bf46ceb0393dc7f10b9863f5824be0ffd9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_mydata.py
@@ -0,0 +1,176 @@
+# ========================================================
+# Grounding DINO Swin-B [BERT 解冻微调版]
+# 策略: Swin-B 冻结 + BERT 参与训练(LR=0.1) + DDP 修正
+# ========================================================
+from pathlib import Path
+
+_GROUNDING_DINO_ROOT = Path(__file__).resolve().parents[3]
+_WORKSPACE_ROOT = _GROUNDING_DINO_ROOT.parents[1]
+
+work_dir = str(_GROUNDING_DINO_ROOT / 'work_dirs' / 'my_finetune_v1')
+_base_ = 'grounding_dino_swin-b_finetune_16xb2_1x_coco.py'
+
+# ================= 1. 路径配置 =================
+train_img_dir = str(_WORKSPACE_ROOT / 'data' / 'PanoImages_data_all' / 'wuhan' / 'wuhan_rect_dir') + '/'
+label_dir = str(_GROUNDING_DINO_ROOT / 'dataset') + '/'
+val_img_dir = str(_WORKSPACE_ROOT / 'data' / 'PanoImages_data_all' / 'rect_img_dir') + '/'
+data_root = label_dir
+
+# ================= 2. 类别定义 =================
+class_name = ('traffic sign', 'street light', 'traffic light', 'surveillance camera',
+ 'ball bollard', 'fire hydrant', 'trash bin', 'manhole', 'traffic cone', 'bollard')
+num_classes = len(class_name)
+
+metainfo = dict(
+ classes=class_name,
+ palette=[(220, 20, 60), (119, 11, 32), (0, 0, 142), (0, 0, 230), (106, 0, 228),
+ (0, 60, 100), (0, 80, 100), (0, 0, 70), (0, 0, 192), (250, 170, 30)]
+)
+
+# ================= 3. 模型设置 (Swin-B) =================
+model = dict(
+ type='GroundingDINO',
+ num_queries=900,
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=False,
+ ),
+ backbone=dict(
+ type='SwinTransformer',
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ # 双卡80G显存充足,设置为 False 可以大幅加快训练速度
+ with_cp=False,
+ ),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[128, 256, 512, 1024],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ bbox_head=dict(
+ type='GroundingDINOHead',
+ num_classes=num_classes,
+ sync_cls_avg_factor=True,
+ contrastive_cfg=dict(max_text_len=256, log_scale=0.0, bias=False),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+)
+
+# ================= 4. 数据 Pipeline =================
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction',
+ 'text', 'custom_entities'))
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='FixScaleResize', scale=(800, 1333), keep_ratio=True, backend='cv2'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities'))
+]
+
+# ================= 5. 数据加载器 (路径修正) =================
+train_dataloader = dict(
+ batch_size=2,
+ num_workers=2,
+ dataset=dict(
+ _delete_=True,
+ type='CocoDataset',
+ data_root=data_root, # 指向标签目录
+ metainfo=metainfo,
+ # 这里直接写你的文件名
+ ann_file='train_coco_data.json',
+ # !!!关键:这里填绝对路径,且 img='' 表示不加额外前缀!!!
+ data_prefix=dict(img=train_img_dir),
+ filter_cfg=dict(filter_empty_gt=False),
+ pipeline=train_pipeline,
+ return_classes=True))
+
+val_dataloader = dict(
+ dataset=dict(
+ type='CocoDataset',
+ metainfo=metainfo,
+ data_root=data_root,
+ # 假设你的验证集json也在 dataset 目录下,叫 val.json (如果不是请修改)
+ ann_file='val_coco_data.json',
+ # 图片路径同上
+ data_prefix=dict(img=val_img_dir),
+ return_classes=True))
+
+test_dataloader = val_dataloader
+
+# ================= 6. 评估器 =================
+val_evaluator = dict(
+ type='CocoMetric',
+ # 这里的路径需要拼接正确,或者直接写绝对路径
+ ann_file=label_dir + 'val_coco_data.json',
+ metric='bbox',
+ classwise=True)
+
+test_evaluator = val_evaluator
+
+# ================= 7. 训练策略 =================
+max_epochs = 12
+train_cfg = dict(max_epochs=max_epochs, val_interval=1)
+
+# 自动缩放学习率 (针对 batch_size=4*2=8)
+auto_scale_lr = dict(base_batch_size=16)
+
+# 优化器
+optim_wrapper = dict(
+ _delete_=True,
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'backbone': dict(lr_mult=0.1),
+ 'language_model': dict(lr_mult=0.1),
+ }))
+
+# 学习率调度
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_pretrain_mixeddata.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_pretrain_mixeddata.py
new file mode 100644
index 0000000000000000000000000000000000000000..92f327fef8311f0f72d7f75149bfc163863e913c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-b_pretrain_mixeddata.py
@@ -0,0 +1,16 @@
+_base_ = [
+ './grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py',
+]
+
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0c6403ee66d9e5782723117191176efbadec2a90
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco.py
@@ -0,0 +1,204 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+load_from = 'https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth' # noqa
+lang_model_name = 'bert-base-uncased'
+
+model = dict(
+ type='GroundingDINO',
+ num_queries=900,
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=False,
+ ),
+ language_model=dict(
+ type='BertModel',
+ name=lang_model_name,
+ pad_to_max=False,
+ use_sub_sentence_represent=True,
+ special_tokens_list=['[CLS]', '[SEP]', '.', '?'],
+ add_pooling_layer=False,
+ ),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(1, 2, 3),
+ with_cp=True,
+ convert_weights=False),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[192, 384, 768],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ bias=True,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ encoder=dict(
+ num_layers=6,
+ num_cp=6,
+ # visual layer config
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=4, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ # text layer config
+ text_layer_cfg=dict(
+ self_attn_cfg=dict(num_heads=4, embed_dims=256, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=1024, ffn_drop=0.0)),
+ # fusion layer config
+ fusion_layer_cfg=dict(
+ v_dim=256,
+ l_dim=256,
+ embed_dim=1024,
+ num_heads=4,
+ init_values=1e-4),
+ ),
+ decoder=dict(
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ # query self attention layer
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to text
+ cross_attn_text_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to image
+ cross_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128, normalize=True, offset=0.0, temperature=20),
+ bbox_head=dict(
+ type='GroundingDINOHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ contrastive_cfg=dict(max_text_len=256, log_scale=0.0, bias=False),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0), # 2.0 in DeformDETR
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0)),
+ dn_cfg=dict( # TODO: Move to model.train_cfg ?
+ label_noise_scale=0.5,
+ box_noise_scale=1.0, # 0.4 for DN-DETR
+ group_cfg=dict(dynamic=True, num_groups=None,
+ num_dn_queries=100)), # TODO: half num_dn_queries
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='BinaryFocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ])),
+ test_cfg=dict(max_per_img=300))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ # The radio of all image in train dataset < 7
+ # follow the original implement
+ scales=[(400, 4200), (500, 4200), (600, 4200)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]
+ ]),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction', 'text',
+ 'custom_entities'))
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='FixScaleResize', scale=(800, 1333), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities'))
+]
+
+train_dataloader = dict(
+ dataset=dict(
+ filter_cfg=dict(filter_empty_gt=False),
+ pipeline=train_pipeline,
+ return_classes=True))
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, return_classes=True))
+test_dataloader = val_dataloader
+
+optim_wrapper = dict(
+ _delete_=True,
+ type='OptimWrapper',
+ optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001),
+ clip_grad=dict(max_norm=0.1, norm_type=2),
+ paramwise_cfg=dict(custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'backbone': dict(lr_mult=0.1)
+ }))
+# learning policy
+max_epochs = 12
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (16 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=32)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py
new file mode 100644
index 0000000000000000000000000000000000000000..c2265e86730f68ed69af246a5e0e87fa2cb5e570
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_finetune_8xb2_20e_cat.py
@@ -0,0 +1,56 @@
+_base_ = 'grounding_dino_swin-t_finetune_16xb2_1x_coco.py'
+
+data_root = 'data/cat/'
+class_name = ('cat', )
+num_classes = len(class_name)
+metainfo = dict(classes=class_name, palette=[(220, 20, 60)])
+
+model = dict(bbox_head=dict(num_classes=num_classes))
+
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ metainfo=metainfo,
+ ann_file='annotations/trainval.json',
+ data_prefix=dict(img='images/')))
+
+val_dataloader = dict(
+ dataset=dict(
+ metainfo=metainfo,
+ data_root=data_root,
+ ann_file='annotations/test.json',
+ data_prefix=dict(img='images/')))
+
+test_dataloader = val_dataloader
+
+val_evaluator = dict(ann_file=data_root + 'annotations/test.json')
+test_evaluator = val_evaluator
+
+max_epoch = 20
+
+default_hooks = dict(
+ checkpoint=dict(interval=1, max_keep_ckpts=1, save_best='auto'),
+ logger=dict(type='LoggerHook', interval=5))
+train_cfg = dict(max_epochs=max_epoch, val_interval=1)
+
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=30),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epoch,
+ by_epoch=True,
+ milestones=[15],
+ gamma=0.1)
+]
+
+optim_wrapper = dict(
+ optimizer=dict(lr=0.00005),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'absolute_pos_embed': dict(decay_mult=0.),
+ 'backbone': dict(lr_mult=0.1),
+ 'language_model': dict(lr_mult=0),
+ }))
+
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py
new file mode 100644
index 0000000000000000000000000000000000000000..7448764ef7ed4fb91bbca981e8006b412e74c414
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py
@@ -0,0 +1,128 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+lang_model_name = 'bert-base-uncased'
+
+model = dict(
+ type='GroundingDINO',
+ num_queries=900,
+ with_box_refine=True,
+ as_two_stage=True,
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=False,
+ ),
+ language_model=dict(
+ type='BertModel',
+ name=lang_model_name,
+ pad_to_max=False,
+ use_sub_sentence_represent=True,
+ special_tokens_list=['[CLS]', '[SEP]', '.', '?'],
+ add_pooling_layer=True,
+ ),
+ backbone=dict(
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=[2, 2, 6, 2],
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.2,
+ patch_norm=True,
+ out_indices=(1, 2, 3),
+ with_cp=False,
+ convert_weights=False),
+ neck=dict(
+ type='ChannelMapper',
+ in_channels=[192, 384, 768],
+ kernel_size=1,
+ out_channels=256,
+ act_cfg=None,
+ bias=True,
+ norm_cfg=dict(type='GN', num_groups=32),
+ num_outs=4),
+ encoder=dict(
+ num_layers=6,
+ # visual layer config
+ layer_cfg=dict(
+ self_attn_cfg=dict(embed_dims=256, num_levels=4, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ # text layer config
+ text_layer_cfg=dict(
+ self_attn_cfg=dict(num_heads=4, embed_dims=256, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=1024, ffn_drop=0.0)),
+ # fusion layer config
+ fusion_layer_cfg=dict(
+ v_dim=256,
+ l_dim=256,
+ embed_dim=1024,
+ num_heads=4,
+ init_values=1e-4),
+ ),
+ decoder=dict(
+ num_layers=6,
+ return_intermediate=True,
+ layer_cfg=dict(
+ # query self attention layer
+ self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to text
+ cross_attn_text_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ # cross attention layer query to image
+ cross_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0),
+ ffn_cfg=dict(
+ embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)),
+ post_norm_cfg=None),
+ positional_encoding=dict(
+ num_feats=128, normalize=True, offset=0.0, temperature=20),
+ bbox_head=dict(
+ type='GroundingDINOHead',
+ num_classes=80,
+ sync_cls_avg_factor=True,
+ contrastive_cfg=dict(max_text_len=256),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0), # 2.0 in DeformDETR
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0)),
+ dn_cfg=dict( # TODO: Move to model.train_cfg ?
+ label_noise_scale=0.5,
+ box_noise_scale=1.0, # 0.4 for DN-DETR
+ group_cfg=dict(dynamic=True, num_groups=None,
+ num_dn_queries=100)), # TODO: half num_dn_queries
+ # training and testing settings
+ train_cfg=None,
+ test_cfg=dict(max_per_img=300))
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile', backend_args=None,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities',
+ 'tokens_positive'))
+]
+
+val_dataloader = dict(
+ dataset=dict(pipeline=test_pipeline, return_classes=True))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..6084159044e8c0e8642a1226c6a9efd85c7d27d2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_lvis.py
@@ -0,0 +1,14 @@
+_base_ = './grounding_dino_swin-t_pretrain_zeroshot_lvis.py'
+
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_mini-lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..68467a7237ca893aa79eb5b0acc9d159f7082968
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-b_pretrain_zeroshot_mini-lvis.py
@@ -0,0 +1,14 @@
+_base_ = './grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py'
+
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d05f0ce1c0cb095c0c9f9a65bd7666cba57afe7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py
@@ -0,0 +1,24 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py'
+
+model = dict(test_cfg=dict(
+ max_per_img=300,
+ chunked_size=40,
+))
+
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/coco/'
+
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ type=dataset_type,
+ ann_file='annotations/lvis_od_val.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+# numpy < 1.24.0
+val_evaluator = dict(
+ _delete_=True,
+ type='LVISFixedAPMetric',
+ ann_file=data_root + 'annotations/lvis_od_val.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py
new file mode 100644
index 0000000000000000000000000000000000000000..0aac6cf33a92827c9c350175977bb1a595d2c0c8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py
@@ -0,0 +1,25 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py'
+
+model = dict(test_cfg=dict(
+ max_per_img=300,
+ chunked_size=40,
+))
+
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/coco/'
+
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ type=dataset_type,
+ ann_file='annotations/lvis_v1_minival_inserted_image_name.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+# numpy < 1.24.0
+val_evaluator = dict(
+ _delete_=True,
+ type='LVISFixedAPMetric',
+ ann_file=data_root +
+ 'annotations/lvis_v1_minival_inserted_image_name.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/metafile.yml b/grounding-dino/mmdetection/configs/grounding_dino/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..dcb5ebf82846d3cfbc2fa345cc89468ba269fd84
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/metafile.yml
@@ -0,0 +1,67 @@
+Collections:
+ - Name: Grounding DINO
+ Metadata:
+ Training Data: Objects365, GoldG, CC3M and COCO
+ Training Techniques:
+ - AdamW
+ - Multi Scale Train
+ - Gradient Clip
+ Training Resources: 3090 GPUs
+ Architecture:
+ - Swin Transformer
+ - BERT
+ Paper:
+ URL: https://arxiv.org/abs/2303.05499
+ Title: 'Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection
+'
+ README: configs/grounding_dino/README.md
+ Code:
+ URL:
+ Version: v3.0.0
+
+Models:
+ - Name: grounding_dino_swin-t_pretrain_obj365_goldg_cap4m
+ In Collection: Grounding DINO
+ Config: configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.5
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth
+ - Name: grounding_dino_swin-b_pretrain_mixeddata
+ In Collection: Grounding DINO
+ Config: configs/grounding_dino/grounding_dino_swin-b_pretrain_mixeddata.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 56.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swinb_cogcoor_mmdet-55949c9c.pth
+ - Name: grounding_dino_swin-t_finetune_16xb2_1x_coco
+ In Collection: Grounding DINO
+ Config: configs/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 58.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-t_finetune_16xb2_1x_coco/grounding_dino_swin-t_finetune_16xb2_1x_coco_20230921_152544-5f234b20.pth
+ - Name: grounding_dino_swin-b_finetune_16xb2_1x_coco
+ In Collection: Grounding DINO
+ Config: configs/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 59.7
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_swin-b_finetune_16xb2_1x_coco/grounding_dino_swin-b_finetune_16xb2_1x_coco_20230921_153201-f219e0c0.pth
+ - Name: grounding_dino_r50_scratch_8xb2_1x_coco
+ In Collection: Grounding DINO
+ Config: configs/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco.py
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/grounding_dino_r50_scratch_8xb2_1x_coco/grounding_dino_r50_scratch_1x_coco-fe0002f2.pth
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw13.py b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw13.py
new file mode 100644
index 0000000000000000000000000000000000000000..65a6bc2a078a9ea5123c745aa72ba22466ea6e58
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw13.py
@@ -0,0 +1,338 @@
+_base_ = '../grounding_dino_swin-b_pretrain_mixeddata.py'
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ test_mode=True,
+ pipeline=base_test_pipeline,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'penguin': {
+# 'suffix': ', which is black and white'
+# },
+# 'puffin': {
+# 'suffix': ' with orange beaks'
+# },
+# 'stingray': {
+# 'suffix': ' which is flat and round'
+# },
+# }
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 CottontailRabbits---------------------#
+class_name = ('Cottontail-Rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+
+caption_prompt = None
+# caption_prompt = {'Cottontail-Rabbit': {'name': 'rabbit'}}
+
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 EgoHands---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+
+caption_prompt = None
+# caption_prompt = {'hand': {'suffix': ' of a person'}}
+
+dataset_EgoHands = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 NorthAmericaMushrooms---------------------#
+class_name = ('CoW', 'chanterelle')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+
+caption_prompt = None
+# caption_prompt = {
+# 'CoW': {
+# 'name': 'flat mushroom'
+# },
+# 'chanterelle': {
+# 'name': 'yellow mushroom'
+# }
+# }
+
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'package': {
+# 'prefix': 'there is a ',
+# 'suffix': ' on the porch'
+# }
+# }
+
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'pothole': {
+# 'prefix': 'there are some ',
+# 'name': 'holes',
+# 'suffix': ' on the road'
+# }
+# }
+
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+dataset_prefixes = [
+ 'AerialMaritimeDrone', 'Aquarium', 'CottontailRabbits', 'EgoHands',
+ 'NorthAmericaMushrooms', 'Packages', 'PascalVOC', 'pistols', 'pothole',
+ 'Raccoon', 'ShellfishOpenImages', 'thermalDogsAndPeople',
+ 'VehiclesOpenImages'
+]
+datasets = [
+ dataset_AerialMaritimeDrone, dataset_Aquarium, dataset_CottontailRabbits,
+ dataset_EgoHands, dataset_NorthAmericaMushrooms, dataset_Packages,
+ dataset_PascalVOC, dataset_pistols, dataset_pothole, dataset_Raccoon,
+ dataset_ShellfishOpenImages, dataset_thermalDogsAndPeople,
+ dataset_VehiclesOpenImages
+]
+metrics = [
+ val_evaluator_AerialMaritimeDrone, val_evaluator_Aquarium,
+ val_evaluator_CottontailRabbits, val_evaluator_EgoHands,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_Packages,
+ val_evaluator_PascalVOC, val_evaluator_pistols, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_ShellfishOpenImages,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_VehiclesOpenImages
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw35.py b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw35.py
new file mode 100644
index 0000000000000000000000000000000000000000..e73cd8e61ba20f4baff6f7c85477a8fae3735e44
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-b_pretrain_odinw35.py
@@ -0,0 +1,796 @@
+_base_ = '../grounding_dino_swin-b_pretrain_mixeddata.py'
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone_large---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone_large = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_large = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 AerialMaritimeDrone_tiled---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/tiled/'
+dataset_AerialMaritimeDrone_tiled = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_tiled = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 AmericanSignLanguageLetters---------------------#
+class_name = ('A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K', 'L', 'M',
+ 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AmericanSignLanguageLetters/American Sign Language Letters.v1-v1.coco/' # noqa
+dataset_AmericanSignLanguageLetters = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AmericanSignLanguageLetters = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 BCCD---------------------#
+class_name = ('Platelets', 'RBC', 'WBC')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'BCCD/BCCD.v3-raw.coco/'
+dataset_BCCD = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_BCCD = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 boggleBoards---------------------#
+class_name = ('Q', 'a', 'an', 'b', 'c', 'd', 'e', 'er', 'f', 'g', 'h', 'he',
+ 'i', 'in', 'j', 'k', 'l', 'm', 'n', 'o', 'o ', 'p', 'q', 'qu',
+ 'r', 's', 't', 't\\', 'th', 'u', 'v', 'w', 'wild', 'x', 'y', 'z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'boggleBoards/416x416AutoOrient/export/'
+dataset_boggleBoards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_boggleBoards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 brackishUnderwater---------------------#
+class_name = ('crab', 'fish', 'jellyfish', 'shrimp', 'small_fish', 'starfish')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'brackishUnderwater/960x540/'
+dataset_brackishUnderwater = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_brackishUnderwater = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 ChessPieces---------------------#
+class_name = (' ', 'black bishop', 'black king', 'black knight', 'black pawn',
+ 'black queen', 'black rook', 'white bishop', 'white king',
+ 'white knight', 'white pawn', 'white queen', 'white rook')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/'
+dataset_ChessPieces = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ChessPieces = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 CottontailRabbits---------------------#
+class_name = ('rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 dice---------------------#
+class_name = ('1', '2', '3', '4', '5', '6')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'dice/mediumColor/export/'
+dataset_dice = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_dice = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 DroneControl---------------------#
+class_name = ('follow', 'follow_hand', 'land', 'land_hand', 'null', 'object',
+ 'takeoff', 'takeoff-hand')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'DroneControl/Drone Control.v3-raw.coco/'
+dataset_DroneControl = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_DroneControl = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 EgoHands_generic---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+caption_prompt = {'hand': {'suffix': ' of a person'}}
+dataset_EgoHands_generic = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ # NOTE w. prompt 0.548; wo. prompt 0.764
+ # caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_generic = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 EgoHands_specific---------------------#
+class_name = ('myleft', 'myright', 'yourleft', 'yourright')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/specific/'
+dataset_EgoHands_specific = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_specific = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------14 HardHatWorkers---------------------#
+class_name = ('head', 'helmet', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'HardHatWorkers/raw/'
+dataset_HardHatWorkers = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_HardHatWorkers = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------15 MaskWearing---------------------#
+class_name = ('mask', 'no-mask')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MaskWearing/raw/'
+dataset_MaskWearing = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MaskWearing = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------16 MountainDewCommercial---------------------#
+class_name = ('bottle', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MountainDewCommercial/'
+dataset_MountainDewCommercial = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MountainDewCommercial = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------17 NorthAmericaMushrooms---------------------#
+class_name = ('flat mushroom', 'yellow mushroom')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------18 openPoetryVision---------------------#
+class_name = ('American Typewriter', 'Andale Mono', 'Apple Chancery', 'Arial',
+ 'Avenir', 'Baskerville', 'Big Caslon', 'Bradley Hand',
+ 'Brush Script MT', 'Chalkboard', 'Comic Sans MS', 'Copperplate',
+ 'Courier', 'Didot', 'Futura', 'Geneva', 'Georgia', 'Gill Sans',
+ 'Helvetica', 'Herculanum', 'Impact', 'Kefa', 'Lucida Grande',
+ 'Luminari', 'Marker Felt', 'Menlo', 'Monaco', 'Noteworthy',
+ 'Optima', 'PT Sans', 'PT Serif', 'Palatino', 'Papyrus',
+ 'Phosphate', 'Rockwell', 'SF Pro', 'SignPainter', 'Skia',
+ 'Snell Roundhand', 'Tahoma', 'Times New Roman', 'Trebuchet MS',
+ 'Verdana')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'openPoetryVision/512x512/'
+dataset_openPoetryVision = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_openPoetryVision = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------19 OxfordPets_by_breed---------------------#
+class_name = ('cat-Abyssinian', 'cat-Bengal', 'cat-Birman', 'cat-Bombay',
+ 'cat-British_Shorthair', 'cat-Egyptian_Mau', 'cat-Maine_Coon',
+ 'cat-Persian', 'cat-Ragdoll', 'cat-Russian_Blue', 'cat-Siamese',
+ 'cat-Sphynx', 'dog-american_bulldog',
+ 'dog-american_pit_bull_terrier', 'dog-basset_hound',
+ 'dog-beagle', 'dog-boxer', 'dog-chihuahua',
+ 'dog-english_cocker_spaniel', 'dog-english_setter',
+ 'dog-german_shorthaired', 'dog-great_pyrenees', 'dog-havanese',
+ 'dog-japanese_chin', 'dog-keeshond', 'dog-leonberger',
+ 'dog-miniature_pinscher', 'dog-newfoundland', 'dog-pomeranian',
+ 'dog-pug', 'dog-saint_bernard', 'dog-samoyed',
+ 'dog-scottish_terrier', 'dog-shiba_inu',
+ 'dog-staffordshire_bull_terrier', 'dog-wheaten_terrier',
+ 'dog-yorkshire_terrier')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-breed/' # noqa
+dataset_OxfordPets_by_breed = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_breed = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------20 OxfordPets_by_species---------------------#
+class_name = ('cat', 'dog')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-species/' # noqa
+dataset_OxfordPets_by_species = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_species = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------21 PKLot---------------------#
+class_name = ('space-empty', 'space-occupied')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PKLot/640/' # noqa
+dataset_PKLot = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PKLot = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------22 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+caption_prompt = {
+ 'package': {
+ 'prefix': 'there is a ',
+ 'suffix': ' on the porch'
+ }
+}
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt, # NOTE w. prompt 0.728; wo. prompt 0.670
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------23 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------24 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------25 plantdoc---------------------#
+class_name = ('Apple Scab Leaf', 'Apple leaf', 'Apple rust leaf',
+ 'Bell_pepper leaf', 'Bell_pepper leaf spot', 'Blueberry leaf',
+ 'Cherry leaf', 'Corn Gray leaf spot', 'Corn leaf blight',
+ 'Corn rust leaf', 'Peach leaf', 'Potato leaf',
+ 'Potato leaf early blight', 'Potato leaf late blight',
+ 'Raspberry leaf', 'Soyabean leaf', 'Soybean leaf',
+ 'Squash Powdery mildew leaf', 'Strawberry leaf',
+ 'Tomato Early blight leaf', 'Tomato Septoria leaf spot',
+ 'Tomato leaf', 'Tomato leaf bacterial spot',
+ 'Tomato leaf late blight', 'Tomato leaf mosaic virus',
+ 'Tomato leaf yellow virus', 'Tomato mold leaf',
+ 'Tomato two spotted spider mites leaf', 'grape leaf',
+ 'grape leaf black rot')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'plantdoc/416x416/'
+dataset_plantdoc = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_plantdoc = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------26 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+caption_prompt = {
+ 'pothole': {
+ 'name': 'holes',
+ 'prefix': 'there are some ',
+ 'suffix': ' on the road'
+ }
+}
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ # NOTE w. prompt 0.221; wo. prompt 0.478
+ # caption_prompt=caption_prompt,
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------27 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------28 selfdrivingCar---------------------#
+class_name = ('biker', 'car', 'pedestrian', 'trafficLight',
+ 'trafficLight-Green', 'trafficLight-GreenLeft',
+ 'trafficLight-Red', 'trafficLight-RedLeft',
+ 'trafficLight-Yellow', 'trafficLight-YellowLeft', 'truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'selfdrivingCar/fixedLarge/export/'
+dataset_selfdrivingCar = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_selfdrivingCar = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------29 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------30 ThermalCheetah---------------------#
+class_name = ('cheetah', 'human')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ThermalCheetah/'
+dataset_ThermalCheetah = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ThermalCheetah = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------31 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------32 UnoCards---------------------#
+class_name = ('0', '1', '2', '3', '4', '5', '6', '7', '8', '9', '10', '11',
+ '12', '13', '14')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'UnoCards/raw/'
+dataset_UnoCards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_UnoCards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------33 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------34 WildfireSmoke---------------------#
+class_name = ('smoke', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'WildfireSmoke/'
+dataset_WildfireSmoke = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_WildfireSmoke = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------35 websiteScreenshots---------------------#
+class_name = ('button', 'field', 'heading', 'iframe', 'image', 'label', 'link',
+ 'text')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'websiteScreenshots/'
+dataset_websiteScreenshots = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_websiteScreenshots = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+
+dataset_prefixes = [
+ 'AerialMaritimeDrone_large',
+ 'AerialMaritimeDrone_tiled',
+ 'AmericanSignLanguageLetters',
+ 'Aquarium',
+ 'BCCD',
+ 'boggleBoards',
+ 'brackishUnderwater',
+ 'ChessPieces',
+ 'CottontailRabbits',
+ 'dice',
+ 'DroneControl',
+ 'EgoHands_generic',
+ 'EgoHands_specific',
+ 'HardHatWorkers',
+ 'MaskWearing',
+ 'MountainDewCommercial',
+ 'NorthAmericaMushrooms',
+ 'openPoetryVision',
+ 'OxfordPets_by_breed',
+ 'OxfordPets_by_species',
+ 'PKLot',
+ 'Packages',
+ 'PascalVOC',
+ 'pistols',
+ 'plantdoc',
+ 'pothole',
+ 'Raccoons',
+ 'selfdrivingCar',
+ 'ShellfishOpenImages',
+ 'ThermalCheetah',
+ 'thermalDogsAndPeople',
+ 'UnoCards',
+ 'VehiclesOpenImages',
+ 'WildfireSmoke',
+ 'websiteScreenshots',
+]
+
+datasets = [
+ dataset_AerialMaritimeDrone_large, dataset_AerialMaritimeDrone_tiled,
+ dataset_AmericanSignLanguageLetters, dataset_Aquarium, dataset_BCCD,
+ dataset_boggleBoards, dataset_brackishUnderwater, dataset_ChessPieces,
+ dataset_CottontailRabbits, dataset_dice, dataset_DroneControl,
+ dataset_EgoHands_generic, dataset_EgoHands_specific,
+ dataset_HardHatWorkers, dataset_MaskWearing, dataset_MountainDewCommercial,
+ dataset_NorthAmericaMushrooms, dataset_openPoetryVision,
+ dataset_OxfordPets_by_breed, dataset_OxfordPets_by_species, dataset_PKLot,
+ dataset_Packages, dataset_PascalVOC, dataset_pistols, dataset_plantdoc,
+ dataset_pothole, dataset_Raccoon, dataset_selfdrivingCar,
+ dataset_ShellfishOpenImages, dataset_ThermalCheetah,
+ dataset_thermalDogsAndPeople, dataset_UnoCards, dataset_VehiclesOpenImages,
+ dataset_WildfireSmoke, dataset_websiteScreenshots
+]
+
+metrics = [
+ val_evaluator_AerialMaritimeDrone_large,
+ val_evaluator_AerialMaritimeDrone_tiled,
+ val_evaluator_AmericanSignLanguageLetters, val_evaluator_Aquarium,
+ val_evaluator_BCCD, val_evaluator_boggleBoards,
+ val_evaluator_brackishUnderwater, val_evaluator_ChessPieces,
+ val_evaluator_CottontailRabbits, val_evaluator_dice,
+ val_evaluator_DroneControl, val_evaluator_EgoHands_generic,
+ val_evaluator_EgoHands_specific, val_evaluator_HardHatWorkers,
+ val_evaluator_MaskWearing, val_evaluator_MountainDewCommercial,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_openPoetryVision,
+ val_evaluator_OxfordPets_by_breed, val_evaluator_OxfordPets_by_species,
+ val_evaluator_PKLot, val_evaluator_Packages, val_evaluator_PascalVOC,
+ val_evaluator_pistols, val_evaluator_plantdoc, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_selfdrivingCar,
+ val_evaluator_ShellfishOpenImages, val_evaluator_ThermalCheetah,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_UnoCards,
+ val_evaluator_VehiclesOpenImages, val_evaluator_WildfireSmoke,
+ val_evaluator_websiteScreenshots
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py
new file mode 100644
index 0000000000000000000000000000000000000000..216b8059726b8fbe9dff3b2a43718bc563502aab
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py
@@ -0,0 +1,338 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py' # noqa
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ test_mode=True,
+ pipeline=base_test_pipeline,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'penguin': {
+# 'suffix': ', which is black and white'
+# },
+# 'puffin': {
+# 'suffix': ' with orange beaks'
+# },
+# 'stingray': {
+# 'suffix': ' which is flat and round'
+# },
+# }
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 CottontailRabbits---------------------#
+class_name = ('Cottontail-Rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+
+caption_prompt = None
+# caption_prompt = {'Cottontail-Rabbit': {'name': 'rabbit'}}
+
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 EgoHands---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+
+caption_prompt = None
+# caption_prompt = {'hand': {'suffix': ' of a person'}}
+
+dataset_EgoHands = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 NorthAmericaMushrooms---------------------#
+class_name = ('CoW', 'chanterelle')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+
+caption_prompt = None
+# caption_prompt = {
+# 'CoW': {
+# 'name': 'flat mushroom'
+# },
+# 'chanterelle': {
+# 'name': 'yellow mushroom'
+# }
+# }
+
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'package': {
+# 'prefix': 'there is a ',
+# 'suffix': ' on the porch'
+# }
+# }
+
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+
+caption_prompt = None
+# caption_prompt = {
+# 'pothole': {
+# 'prefix': 'there are some ',
+# 'name': 'holes',
+# 'suffix': ' on the road'
+# }
+# }
+
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+dataset_prefixes = [
+ 'AerialMaritimeDrone', 'Aquarium', 'CottontailRabbits', 'EgoHands',
+ 'NorthAmericaMushrooms', 'Packages', 'PascalVOC', 'pistols', 'pothole',
+ 'Raccoon', 'ShellfishOpenImages', 'thermalDogsAndPeople',
+ 'VehiclesOpenImages'
+]
+datasets = [
+ dataset_AerialMaritimeDrone, dataset_Aquarium, dataset_CottontailRabbits,
+ dataset_EgoHands, dataset_NorthAmericaMushrooms, dataset_Packages,
+ dataset_PascalVOC, dataset_pistols, dataset_pothole, dataset_Raccoon,
+ dataset_ShellfishOpenImages, dataset_thermalDogsAndPeople,
+ dataset_VehiclesOpenImages
+]
+metrics = [
+ val_evaluator_AerialMaritimeDrone, val_evaluator_Aquarium,
+ val_evaluator_CottontailRabbits, val_evaluator_EgoHands,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_Packages,
+ val_evaluator_PascalVOC, val_evaluator_pistols, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_ShellfishOpenImages,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_VehiclesOpenImages
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py
new file mode 100644
index 0000000000000000000000000000000000000000..3df0394a204061684cbb9bb66adb08d92a784efb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py
@@ -0,0 +1,796 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py' # noqa
+
+dataset_type = 'CocoDataset'
+data_root = 'data/odinw/'
+
+base_test_pipeline = _base_.test_pipeline
+base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'text',
+ 'custom_entities', 'caption_prompt')
+
+# ---------------------1 AerialMaritimeDrone_large---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/large/'
+dataset_AerialMaritimeDrone_large = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_large = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------2 AerialMaritimeDrone_tiled---------------------#
+class_name = ('boat', 'car', 'dock', 'jetski', 'lift')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AerialMaritimeDrone/tiled/'
+dataset_AerialMaritimeDrone_tiled = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AerialMaritimeDrone_tiled = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------3 AmericanSignLanguageLetters---------------------#
+class_name = ('A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K', 'L', 'M',
+ 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'AmericanSignLanguageLetters/American Sign Language Letters.v1-v1.coco/' # noqa
+dataset_AmericanSignLanguageLetters = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_AmericanSignLanguageLetters = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------4 Aquarium---------------------#
+class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish',
+ 'stingray')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/'
+dataset_Aquarium = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Aquarium = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------5 BCCD---------------------#
+class_name = ('Platelets', 'RBC', 'WBC')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'BCCD/BCCD.v3-raw.coco/'
+dataset_BCCD = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_BCCD = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------6 boggleBoards---------------------#
+class_name = ('Q', 'a', 'an', 'b', 'c', 'd', 'e', 'er', 'f', 'g', 'h', 'he',
+ 'i', 'in', 'j', 'k', 'l', 'm', 'n', 'o', 'o ', 'p', 'q', 'qu',
+ 'r', 's', 't', 't\\', 'th', 'u', 'v', 'w', 'wild', 'x', 'y', 'z')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'boggleBoards/416x416AutoOrient/export/'
+dataset_boggleBoards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_boggleBoards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------7 brackishUnderwater---------------------#
+class_name = ('crab', 'fish', 'jellyfish', 'shrimp', 'small_fish', 'starfish')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'brackishUnderwater/960x540/'
+dataset_brackishUnderwater = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_brackishUnderwater = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------8 ChessPieces---------------------#
+class_name = (' ', 'black bishop', 'black king', 'black knight', 'black pawn',
+ 'black queen', 'black rook', 'white bishop', 'white king',
+ 'white knight', 'white pawn', 'white queen', 'white rook')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/'
+dataset_ChessPieces = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ChessPieces = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------9 CottontailRabbits---------------------#
+class_name = ('rabbit', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'CottontailRabbits/'
+dataset_CottontailRabbits = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_CottontailRabbits = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------10 dice---------------------#
+class_name = ('1', '2', '3', '4', '5', '6')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'dice/mediumColor/export/'
+dataset_dice = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_dice = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------11 DroneControl---------------------#
+class_name = ('follow', 'follow_hand', 'land', 'land_hand', 'null', 'object',
+ 'takeoff', 'takeoff-hand')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'DroneControl/Drone Control.v3-raw.coco/'
+dataset_DroneControl = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_DroneControl = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------12 EgoHands_generic---------------------#
+class_name = ('hand', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/generic/'
+caption_prompt = {'hand': {'suffix': ' of a person'}}
+dataset_EgoHands_generic = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ # NOTE w. prompt 0.526, wo. prompt 0.608
+ # caption_prompt=caption_prompt,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_generic = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------13 EgoHands_specific---------------------#
+class_name = ('myleft', 'myright', 'yourleft', 'yourright')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'EgoHands/specific/'
+dataset_EgoHands_specific = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_EgoHands_specific = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------14 HardHatWorkers---------------------#
+class_name = ('head', 'helmet', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'HardHatWorkers/raw/'
+dataset_HardHatWorkers = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_HardHatWorkers = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------15 MaskWearing---------------------#
+class_name = ('mask', 'no-mask')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MaskWearing/raw/'
+dataset_MaskWearing = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MaskWearing = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------16 MountainDewCommercial---------------------#
+class_name = ('bottle', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'MountainDewCommercial/'
+dataset_MountainDewCommercial = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_MountainDewCommercial = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------17 NorthAmericaMushrooms---------------------#
+class_name = ('flat mushroom', 'yellow mushroom')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+dataset_NorthAmericaMushrooms = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/new_annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_NorthAmericaMushrooms = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/new_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------18 openPoetryVision---------------------#
+class_name = ('American Typewriter', 'Andale Mono', 'Apple Chancery', 'Arial',
+ 'Avenir', 'Baskerville', 'Big Caslon', 'Bradley Hand',
+ 'Brush Script MT', 'Chalkboard', 'Comic Sans MS', 'Copperplate',
+ 'Courier', 'Didot', 'Futura', 'Geneva', 'Georgia', 'Gill Sans',
+ 'Helvetica', 'Herculanum', 'Impact', 'Kefa', 'Lucida Grande',
+ 'Luminari', 'Marker Felt', 'Menlo', 'Monaco', 'Noteworthy',
+ 'Optima', 'PT Sans', 'PT Serif', 'Palatino', 'Papyrus',
+ 'Phosphate', 'Rockwell', 'SF Pro', 'SignPainter', 'Skia',
+ 'Snell Roundhand', 'Tahoma', 'Times New Roman', 'Trebuchet MS',
+ 'Verdana')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'openPoetryVision/512x512/'
+dataset_openPoetryVision = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_openPoetryVision = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------19 OxfordPets_by_breed---------------------#
+class_name = ('cat-Abyssinian', 'cat-Bengal', 'cat-Birman', 'cat-Bombay',
+ 'cat-British_Shorthair', 'cat-Egyptian_Mau', 'cat-Maine_Coon',
+ 'cat-Persian', 'cat-Ragdoll', 'cat-Russian_Blue', 'cat-Siamese',
+ 'cat-Sphynx', 'dog-american_bulldog',
+ 'dog-american_pit_bull_terrier', 'dog-basset_hound',
+ 'dog-beagle', 'dog-boxer', 'dog-chihuahua',
+ 'dog-english_cocker_spaniel', 'dog-english_setter',
+ 'dog-german_shorthaired', 'dog-great_pyrenees', 'dog-havanese',
+ 'dog-japanese_chin', 'dog-keeshond', 'dog-leonberger',
+ 'dog-miniature_pinscher', 'dog-newfoundland', 'dog-pomeranian',
+ 'dog-pug', 'dog-saint_bernard', 'dog-samoyed',
+ 'dog-scottish_terrier', 'dog-shiba_inu',
+ 'dog-staffordshire_bull_terrier', 'dog-wheaten_terrier',
+ 'dog-yorkshire_terrier')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-breed/' # noqa
+dataset_OxfordPets_by_breed = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_breed = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------20 OxfordPets_by_species---------------------#
+class_name = ('cat', 'dog')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'OxfordPets/by-species/' # noqa
+dataset_OxfordPets_by_species = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_OxfordPets_by_species = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------21 PKLot---------------------#
+class_name = ('space-empty', 'space-occupied')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PKLot/640/' # noqa
+dataset_PKLot = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PKLot = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------22 Packages---------------------#
+class_name = ('package', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Packages/Raw/'
+caption_prompt = {
+ 'package': {
+ 'prefix': 'there is a ',
+ 'suffix': ' on the porch'
+ }
+}
+dataset_Packages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=base_test_pipeline,
+ caption_prompt=caption_prompt, # NOTE w. prompt 0.695; wo. prompt 0.687
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Packages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------23 PascalVOC---------------------#
+class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
+ 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
+ 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
+ 'tvmonitor')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'PascalVOC/'
+dataset_PascalVOC = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_PascalVOC = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------24 pistols---------------------#
+class_name = ('pistol', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pistols/export/'
+dataset_pistols = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pistols = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------25 plantdoc---------------------#
+class_name = ('Apple Scab Leaf', 'Apple leaf', 'Apple rust leaf',
+ 'Bell_pepper leaf', 'Bell_pepper leaf spot', 'Blueberry leaf',
+ 'Cherry leaf', 'Corn Gray leaf spot', 'Corn leaf blight',
+ 'Corn rust leaf', 'Peach leaf', 'Potato leaf',
+ 'Potato leaf early blight', 'Potato leaf late blight',
+ 'Raspberry leaf', 'Soyabean leaf', 'Soybean leaf',
+ 'Squash Powdery mildew leaf', 'Strawberry leaf',
+ 'Tomato Early blight leaf', 'Tomato Septoria leaf spot',
+ 'Tomato leaf', 'Tomato leaf bacterial spot',
+ 'Tomato leaf late blight', 'Tomato leaf mosaic virus',
+ 'Tomato leaf yellow virus', 'Tomato mold leaf',
+ 'Tomato two spotted spider mites leaf', 'grape leaf',
+ 'grape leaf black rot')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'plantdoc/416x416/'
+dataset_plantdoc = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_plantdoc = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------26 pothole---------------------#
+class_name = ('pothole', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'pothole/'
+caption_prompt = {
+ 'pothole': {
+ 'name': 'holes',
+ 'prefix': 'there are some ',
+ 'suffix': ' on the road'
+ }
+}
+dataset_pothole = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ # NOTE w. prompt 0.137; wo. prompt 0.215
+ # caption_prompt=caption_prompt,
+ pipeline=base_test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_pothole = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------27 Raccoon---------------------#
+class_name = ('raccoon', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/'
+dataset_Raccoon = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_Raccoon = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------28 selfdrivingCar---------------------#
+class_name = ('biker', 'car', 'pedestrian', 'trafficLight',
+ 'trafficLight-Green', 'trafficLight-GreenLeft',
+ 'trafficLight-Red', 'trafficLight-RedLeft',
+ 'trafficLight-Yellow', 'trafficLight-YellowLeft', 'truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'selfdrivingCar/fixedLarge/export/'
+dataset_selfdrivingCar = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='val_annotations_without_background.json',
+ data_prefix=dict(img=''),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_selfdrivingCar = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'val_annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------29 ShellfishOpenImages---------------------#
+class_name = ('Crab', 'Lobster', 'Shrimp')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ShellfishOpenImages/raw/'
+dataset_ShellfishOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ShellfishOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------30 ThermalCheetah---------------------#
+class_name = ('cheetah', 'human')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'ThermalCheetah/'
+dataset_ThermalCheetah = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_ThermalCheetah = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------31 thermalDogsAndPeople---------------------#
+class_name = ('dog', 'person')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'thermalDogsAndPeople/'
+dataset_thermalDogsAndPeople = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_thermalDogsAndPeople = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------32 UnoCards---------------------#
+class_name = ('0', '1', '2', '3', '4', '5', '6', '7', '8', '9', '10', '11',
+ '12', '13', '14')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'UnoCards/raw/'
+dataset_UnoCards = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_UnoCards = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------33 VehiclesOpenImages---------------------#
+class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'VehiclesOpenImages/416x416/'
+dataset_VehiclesOpenImages = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_VehiclesOpenImages = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------34 WildfireSmoke---------------------#
+class_name = ('smoke', )
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'WildfireSmoke/'
+dataset_WildfireSmoke = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_WildfireSmoke = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# ---------------------35 websiteScreenshots---------------------#
+class_name = ('button', 'field', 'heading', 'iframe', 'image', 'label', 'link',
+ 'text')
+metainfo = dict(classes=class_name)
+_data_root = data_root + 'websiteScreenshots/'
+dataset_websiteScreenshots = dict(
+ type=dataset_type,
+ metainfo=metainfo,
+ data_root=_data_root,
+ ann_file='valid/annotations_without_background.json',
+ data_prefix=dict(img='valid/'),
+ pipeline=_base_.test_pipeline,
+ test_mode=True,
+ return_classes=True)
+val_evaluator_websiteScreenshots = dict(
+ type='CocoMetric',
+ ann_file=_data_root + 'valid/annotations_without_background.json',
+ metric='bbox')
+
+# --------------------- Config---------------------#
+
+dataset_prefixes = [
+ 'AerialMaritimeDrone_large',
+ 'AerialMaritimeDrone_tiled',
+ 'AmericanSignLanguageLetters',
+ 'Aquarium',
+ 'BCCD',
+ 'boggleBoards',
+ 'brackishUnderwater',
+ 'ChessPieces',
+ 'CottontailRabbits',
+ 'dice',
+ 'DroneControl',
+ 'EgoHands_generic',
+ 'EgoHands_specific',
+ 'HardHatWorkers',
+ 'MaskWearing',
+ 'MountainDewCommercial',
+ 'NorthAmericaMushrooms',
+ 'openPoetryVision',
+ 'OxfordPets_by_breed',
+ 'OxfordPets_by_species',
+ 'PKLot',
+ 'Packages',
+ 'PascalVOC',
+ 'pistols',
+ 'plantdoc',
+ 'pothole',
+ 'Raccoons',
+ 'selfdrivingCar',
+ 'ShellfishOpenImages',
+ 'ThermalCheetah',
+ 'thermalDogsAndPeople',
+ 'UnoCards',
+ 'VehiclesOpenImages',
+ 'WildfireSmoke',
+ 'websiteScreenshots',
+]
+
+datasets = [
+ dataset_AerialMaritimeDrone_large, dataset_AerialMaritimeDrone_tiled,
+ dataset_AmericanSignLanguageLetters, dataset_Aquarium, dataset_BCCD,
+ dataset_boggleBoards, dataset_brackishUnderwater, dataset_ChessPieces,
+ dataset_CottontailRabbits, dataset_dice, dataset_DroneControl,
+ dataset_EgoHands_generic, dataset_EgoHands_specific,
+ dataset_HardHatWorkers, dataset_MaskWearing, dataset_MountainDewCommercial,
+ dataset_NorthAmericaMushrooms, dataset_openPoetryVision,
+ dataset_OxfordPets_by_breed, dataset_OxfordPets_by_species, dataset_PKLot,
+ dataset_Packages, dataset_PascalVOC, dataset_pistols, dataset_plantdoc,
+ dataset_pothole, dataset_Raccoon, dataset_selfdrivingCar,
+ dataset_ShellfishOpenImages, dataset_ThermalCheetah,
+ dataset_thermalDogsAndPeople, dataset_UnoCards, dataset_VehiclesOpenImages,
+ dataset_WildfireSmoke, dataset_websiteScreenshots
+]
+
+metrics = [
+ val_evaluator_AerialMaritimeDrone_large,
+ val_evaluator_AerialMaritimeDrone_tiled,
+ val_evaluator_AmericanSignLanguageLetters, val_evaluator_Aquarium,
+ val_evaluator_BCCD, val_evaluator_boggleBoards,
+ val_evaluator_brackishUnderwater, val_evaluator_ChessPieces,
+ val_evaluator_CottontailRabbits, val_evaluator_dice,
+ val_evaluator_DroneControl, val_evaluator_EgoHands_generic,
+ val_evaluator_EgoHands_specific, val_evaluator_HardHatWorkers,
+ val_evaluator_MaskWearing, val_evaluator_MountainDewCommercial,
+ val_evaluator_NorthAmericaMushrooms, val_evaluator_openPoetryVision,
+ val_evaluator_OxfordPets_by_breed, val_evaluator_OxfordPets_by_species,
+ val_evaluator_PKLot, val_evaluator_Packages, val_evaluator_PascalVOC,
+ val_evaluator_pistols, val_evaluator_plantdoc, val_evaluator_pothole,
+ val_evaluator_Raccoon, val_evaluator_selfdrivingCar,
+ val_evaluator_ShellfishOpenImages, val_evaluator_ThermalCheetah,
+ val_evaluator_thermalDogsAndPeople, val_evaluator_UnoCards,
+ val_evaluator_VehiclesOpenImages, val_evaluator_WildfireSmoke,
+ val_evaluator_websiteScreenshots
+]
+
+# -------------------------------------------------#
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/odinw/override_category.py b/grounding-dino/mmdetection/configs/grounding_dino/odinw/override_category.py
new file mode 100644
index 0000000000000000000000000000000000000000..9ff05fc6e5e4d0989cf7fcf7af4dc902ee99f3a3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/odinw/override_category.py
@@ -0,0 +1,109 @@
+# Copyright (c) OpenMMLab. All rights reserved.
+import argparse
+
+import mmengine
+
+
+def parse_args():
+ parser = argparse.ArgumentParser(description='Override Category')
+ parser.add_argument('data_root')
+ return parser.parse_args()
+
+
+def main():
+ args = parse_args()
+
+ ChessPieces = [{
+ 'id': 1,
+ 'name': ' ',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 2,
+ 'name': 'black bishop',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 3,
+ 'name': 'black king',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 4,
+ 'name': 'black knight',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 5,
+ 'name': 'black pawn',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 6,
+ 'name': 'black queen',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 7,
+ 'name': 'black rook',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 8,
+ 'name': 'white bishop',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 9,
+ 'name': 'white king',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 10,
+ 'name': 'white knight',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 11,
+ 'name': 'white pawn',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 12,
+ 'name': 'white queen',
+ 'supercategory': 'pieces'
+ }, {
+ 'id': 13,
+ 'name': 'white rook',
+ 'supercategory': 'pieces'
+ }]
+
+ _data_root = args.data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/'
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = ChessPieces
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+ CottontailRabbits = [{
+ 'id': 1,
+ 'name': 'rabbit',
+ 'supercategory': 'Cottontail-Rabbit'
+ }]
+
+ _data_root = args.data_root + 'CottontailRabbits/'
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = CottontailRabbits
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+ NorthAmericaMushrooms = [{
+ 'id': 1,
+ 'name': 'flat mushroom',
+ 'supercategory': 'mushroom'
+ }, {
+ 'id': 2,
+ 'name': 'yellow mushroom',
+ 'supercategory': 'mushroom'
+ }]
+
+ _data_root = args.data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa
+ json_data = mmengine.load(_data_root +
+ 'valid/annotations_without_background.json')
+ json_data['categories'] = NorthAmericaMushrooms
+ mmengine.dump(json_data,
+ _data_root + 'valid/new_annotations_without_background.json')
+
+
+if __name__ == '__main__':
+ main()
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-b_pretrain_zeroshot_refexp.py b/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-b_pretrain_zeroshot_refexp.py
new file mode 100644
index 0000000000000000000000000000000000000000..dea0bad08c0ebf6455211fadb268b07868ab4ded
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-b_pretrain_zeroshot_refexp.py
@@ -0,0 +1,14 @@
+_base_ = './grounding_dino_swin-t_pretrain_zeroshot_refexp.py'
+
+model = dict(
+ type='GroundingDINO',
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=[2, 2, 18, 2],
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ drop_path_rate=0.3,
+ patch_norm=True),
+ neck=dict(in_channels=[256, 512, 1024]),
+)
diff --git a/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py b/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py
new file mode 100644
index 0000000000000000000000000000000000000000..4b5c46574a30bbb2253fc69f79edbcf0cb016505
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py
@@ -0,0 +1,228 @@
+_base_ = '../grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py'
+
+# 30 is an empirical value, just set it to the maximum value
+# without affecting the evaluation result
+model = dict(test_cfg=dict(max_per_img=30))
+
+data_root = 'data/coco/'
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile', backend_args=None,
+ imdecode_backend='pillow'),
+ dict(
+ type='FixScaleResize',
+ scale=(800, 1333),
+ keep_ratio=True,
+ backend='pillow'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'text', 'custom_entities',
+ 'tokens_positive'))
+]
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/final_refexp_val.json'
+val_dataset_all_val = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+val_evaluator_all_val = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_refcoco_testA.json'
+val_dataset_refcoco_testA = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_refcoco_testA = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_refcoco_testB.json'
+val_dataset_refcoco_testB = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_refcoco_testB = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_refcoco+_testA.json'
+val_dataset_refcoco_plus_testA = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_refcoco_plus_testA = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_refcoco+_testB.json'
+val_dataset_refcoco_plus_testB = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_refcoco_plus_testB = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_refcocog_test.json'
+val_dataset_refcocog_test = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_refcocog_test = dict(
+ type='RefExpMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ topk=(1, 5, 10))
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_grefcoco_val.json'
+val_dataset_grefcoco_val = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_grefcoco_val = dict(
+ type='gRefCOCOMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ thresh_score=0.7,
+ thresh_f1=1.0)
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_grefcoco_testA.json'
+val_dataset_grefcoco_testA = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_grefcoco_testA = dict(
+ type='gRefCOCOMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ thresh_score=0.7,
+ thresh_f1=1.0)
+
+# -------------------------------------------------#
+ann_file = 'mdetr_annotations/finetune_grefcoco_testB.json'
+val_dataset_grefcoco_testB = dict(
+ type='MDETRStyleRefCocoDataset',
+ data_root=data_root,
+ ann_file=ann_file,
+ data_prefix=dict(img='train2014/'),
+ test_mode=True,
+ return_classes=True,
+ pipeline=test_pipeline,
+ backend_args=None)
+
+val_evaluator_grefcoco_testB = dict(
+ type='gRefCOCOMetric',
+ ann_file=data_root + ann_file,
+ metric='bbox',
+ iou_thrs=0.5,
+ thresh_score=0.7,
+ thresh_f1=1.0)
+
+# -------------------------------------------------#
+datasets = [
+ val_dataset_all_val, val_dataset_refcoco_testA, val_dataset_refcoco_testB,
+ val_dataset_refcoco_plus_testA, val_dataset_refcoco_plus_testB,
+ val_dataset_refcocog_test, val_dataset_grefcoco_val,
+ val_dataset_grefcoco_testA, val_dataset_grefcoco_testB
+]
+dataset_prefixes = [
+ 'val', 'refcoco_testA', 'refcoco_testB', 'refcoco+_testA',
+ 'refcoco+_testB', 'refcocog_test', 'grefcoco_val', 'grefcoco_testA',
+ 'grefcoco_testB'
+]
+metrics = [
+ val_evaluator_all_val, val_evaluator_refcoco_testA,
+ val_evaluator_refcoco_testB, val_evaluator_refcoco_plus_testA,
+ val_evaluator_refcoco_plus_testB, val_evaluator_refcocog_test,
+ val_evaluator_grefcoco_val, val_evaluator_grefcoco_testA,
+ val_evaluator_grefcoco_testB
+]
+
+val_dataloader = dict(
+ dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='MultiDatasetsEvaluator',
+ metrics=metrics,
+ dataset_prefixes=dataset_prefixes)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/README.md b/grounding-dino/mmdetection/configs/guided_anchoring/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1a5e505d2888f4c521c29d9c8bc6079fac077590
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/README.md
@@ -0,0 +1,59 @@
+# Guided Anchoring
+
+> [Region Proposal by Guided Anchoring](https://arxiv.org/abs/1901.03278)
+
+
+
+## Abstract
+
+Region anchors are the cornerstone of modern object detection techniques. State-of-the-art detectors mostly rely on a dense anchoring scheme, where anchors are sampled uniformly over the spatial domain with a predefined set of scales and aspect ratios. In this paper, we revisit this foundational stage. Our study shows that it can be done much more effectively and efficiently. Specifically, we present an alternative scheme, named Guided Anchoring, which leverages semantic features to guide the anchoring. The proposed method jointly predicts the locations where the center of objects of interest are likely to exist as well as the scales and aspect ratios at different locations. On top of predicted anchor shapes, we mitigate the feature inconsistency with a feature adaption module. We also study the use of high-quality proposals to improve detection performance. The anchoring scheme can be seamlessly integrated into proposal methods and detectors. With Guided Anchoring, we achieve 9.1% higher recall on MS COCO with 90% fewer anchors than the RPN baseline. We also adopt Guided Anchoring in Fast R-CNN, Faster R-CNN and RetinaNet, respectively improving the detection mAP by 2.2%, 2.7% and 1.2%.
+
+
+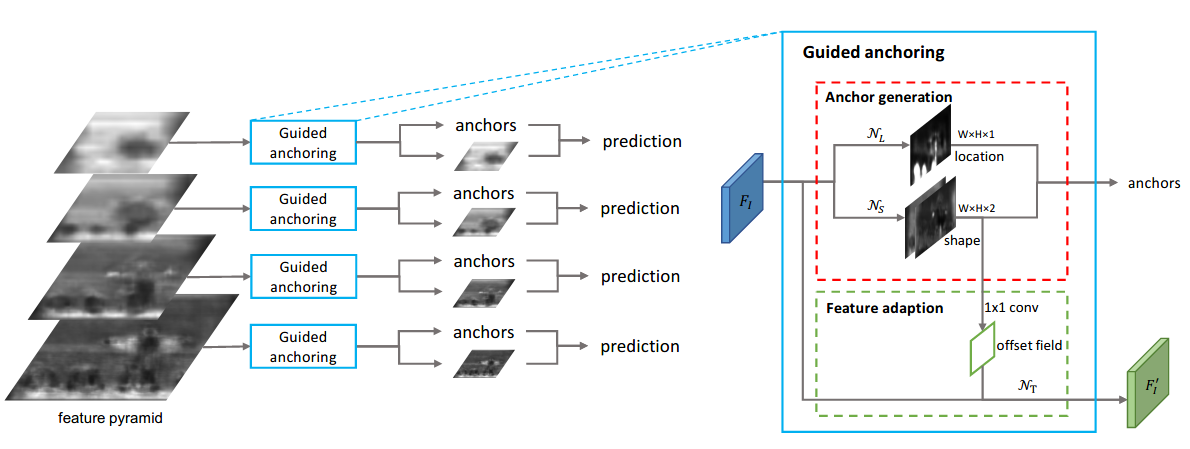 +
+
+
+## Results and Models
+
+The results on COCO 2017 val is shown in the below table. (results on test-dev are usually slightly higher than val).
+
+| Method | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | AR 1000 | Config | Download |
+| :----: | :-------------: | :-----: | :-----: | :------: | :------------: | :-----: | :------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| GA-RPN | R-50-FPN | caffe | 1x | 5.3 | 15.8 | 68.4 | [config](./ga-rpn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r50_caffe_fpn_1x_coco/ga_rpn_r50_caffe_fpn_1x_coco_20200531-899008a6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r50_caffe_fpn_1x_coco/ga_rpn_r50_caffe_fpn_1x_coco_20200531_011819.log.json) |
+| GA-RPN | R-101-FPN | caffe | 1x | 7.3 | 13.0 | 69.5 | [config](./ga-rpn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r101_caffe_fpn_1x_coco/ga_rpn_r101_caffe_fpn_1x_coco_20200531-ca9ba8fb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r101_caffe_fpn_1x_coco/ga_rpn_r101_caffe_fpn_1x_coco_20200531_011812.log.json) |
+| GA-RPN | X-101-32x4d-FPN | pytorch | 1x | 8.5 | 10.0 | 70.6 | [config](./ga-rpn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_32x4d_fpn_1x_coco/ga_rpn_x101_32x4d_fpn_1x_coco_20200220-c28d1b18.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_32x4d_fpn_1x_coco/ga_rpn_x101_32x4d_fpn_1x_coco_20200220_221326.log.json) |
+| GA-RPN | X-101-64x4d-FPN | pytorch | 1x | 7.1 | 7.5 | 71.2 | [config](./ga-rpn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_64x4d_fpn_1x_coco/ga_rpn_x101_64x4d_fpn_1x_coco_20200225-3c6e1aa2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_64x4d_fpn_1x_coco/ga_rpn_x101_64x4d_fpn_1x_coco_20200225_152704.log.json) |
+
+| Method | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :------------: | :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :--------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| GA-Faster RCNN | R-50-FPN | caffe | 1x | 5.5 | | 39.6 | [config](./ga-faster-rcnn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r50_caffe_fpn_1x_coco/ga_faster_r50_caffe_fpn_1x_coco_20200702_000718-a11ccfe6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r50_caffe_fpn_1x_coco/ga_faster_r50_caffe_fpn_1x_coco_20200702_000718.log.json) |
+| GA-Faster RCNN | R-101-FPN | caffe | 1x | 7.5 | | 41.5 | [config](./ga-faster-rcnn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r101_caffe_fpn_1x_coco/ga_faster_r101_caffe_fpn_1x_coco_bbox_mAP-0.415_20200505_115528-fb82e499.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r101_caffe_fpn_1x_coco/ga_faster_r101_caffe_fpn_1x_coco_20200505_115528.log.json) |
+| GA-Faster RCNN | X-101-32x4d-FPN | pytorch | 1x | 8.7 | 9.7 | 43.0 | [config](./ga-faster-rcnn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_32x4d_fpn_1x_coco/ga_faster_x101_32x4d_fpn_1x_coco_20200215-1ded9da3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_32x4d_fpn_1x_coco/ga_faster_x101_32x4d_fpn_1x_coco_20200215_184547.log.json) |
+| GA-Faster RCNN | X-101-64x4d-FPN | pytorch | 1x | 11.8 | 7.3 | 43.9 | [config](./ga-faster-rcnn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_64x4d_fpn_1x_coco/ga_faster_x101_64x4d_fpn_1x_coco_20200215-0fa7bde7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_64x4d_fpn_1x_coco/ga_faster_x101_64x4d_fpn_1x_coco_20200215_104455.log.json) |
+| GA-RetinaNet | R-50-FPN | caffe | 1x | 3.5 | 16.8 | 36.9 | [config](./ga-retinanet_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r50_caffe_fpn_1x_coco/ga_retinanet_r50_caffe_fpn_1x_coco_20201020-39581c6f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r50_caffe_fpn_1x_coco/ga_retinanet_r50_caffe_fpn_1x_coco_20201020_225450.log.json) |
+| GA-RetinaNet | R-101-FPN | caffe | 1x | 5.5 | 12.9 | 39.0 | [config](./ga-retinanet_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r101_caffe_fpn_1x_coco/ga_retinanet_r101_caffe_fpn_1x_coco_20200531-6266453c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r101_caffe_fpn_1x_coco/ga_retinanet_r101_caffe_fpn_1x_coco_20200531_012847.log.json) |
+| GA-RetinaNet | X-101-32x4d-FPN | pytorch | 1x | 6.9 | 10.6 | 40.5 | [config](./ga-retinanet_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_32x4d_fpn_1x_coco/ga_retinanet_x101_32x4d_fpn_1x_coco_20200219-40c56caa.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_32x4d_fpn_1x_coco/ga_retinanet_x101_32x4d_fpn_1x_coco_20200219_223025.log.json) |
+| GA-RetinaNet | X-101-64x4d-FPN | pytorch | 1x | 9.9 | 7.7 | 41.3 | [config](./ga-retinanet_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_64x4d_fpn_1x_coco/ga_retinanet_x101_64x4d_fpn_1x_coco_20200226-ef9f7f1f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_64x4d_fpn_1x_coco/ga_retinanet_x101_64x4d_fpn_1x_coco_20200226_221123.log.json) |
+
+- In the Guided Anchoring paper, `score_thr` is set to 0.001 in Fast/Faster RCNN and 0.05 in RetinaNet for both baselines and Guided Anchoring.
+
+- Performance on COCO test-dev benchmark are shown as follows.
+
+| Method | Backbone | Style | Lr schd | Aug Train | Score thr | AP | AP_50 | AP_75 | AP_small | AP_medium | AP_large | Download |
+| :------------: | :-------: | :---: | :-----: | :-------: | :-------: | :-: | :---: | :---: | :------: | :-------: | :------: | :------: |
+| GA-Faster RCNN | R-101-FPN | caffe | 1x | F | 0.05 | | | | | | | |
+| GA-Faster RCNN | R-101-FPN | caffe | 1x | F | 0.001 | | | | | | | |
+| GA-RetinaNet | R-101-FPN | caffe | 1x | F | 0.05 | | | | | | | |
+| GA-RetinaNet | R-101-FPN | caffe | 2x | T | 0.05 | | | | | | | |
+
+## Citation
+
+We provide config files to reproduce the results in the CVPR 2019 paper for [Region Proposal by Guided Anchoring](https://arxiv.org/abs/1901.03278).
+
+```latex
+@inproceedings{wang2019region,
+ title={Region Proposal by Guided Anchoring},
+ author={Jiaqi Wang and Kai Chen and Shuo Yang and Chen Change Loy and Dahua Lin},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-fast-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-fast-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2d0579c53cb23d71d0bec57387f413cc39449e93
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-fast-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,66 @@
+_base_ = '../fast_rcnn/fast-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ roi_head=dict(
+ bbox_head=dict(bbox_coder=dict(target_stds=[0.05, 0.05, 0.1, 0.1]))),
+ # model training and testing settings
+ train_cfg=dict(
+ rcnn=dict(
+ assigner=dict(pos_iou_thr=0.6, neg_iou_thr=0.6, min_pos_iou=0.6),
+ sampler=dict(num=256))),
+ test_cfg=dict(rcnn=dict(score_thr=1e-3)))
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+img_norm_cfg = dict(
+ mean=[103.530, 116.280, 123.675], std=[1.0, 1.0, 1.0], to_rgb=False)
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadProposals', num_max_proposals=300),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', img_scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', flip_ratio=0.5),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='DefaultFormatBundle'),
+ dict(type='Collect', keys=['img', 'proposals', 'gt_bboxes', 'gt_labels']),
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadProposals', num_max_proposals=None),
+ dict(
+ type='MultiScaleFlipAug',
+ img_scale=(1333, 800),
+ flip=False,
+ transforms=[
+ dict(type='Resize', keep_ratio=True),
+ dict(type='RandomFlip'),
+ dict(type='Normalize', **img_norm_cfg),
+ dict(type='Pad', size_divisor=32),
+ dict(type='ImageToTensor', keys=['img']),
+ dict(type='Collect', keys=['img', 'proposals']),
+ ])
+]
+# TODO: support loading proposals
+data = dict(
+ train=dict(
+ proposal_file=data_root + 'proposals/ga_rpn_r50_fpn_1x_train2017.pkl',
+ pipeline=train_pipeline),
+ val=dict(
+ proposal_file=data_root + 'proposals/ga_rpn_r50_fpn_1x_val2017.pkl',
+ pipeline=test_pipeline),
+ test=dict(
+ proposal_file=data_root + 'proposals/ga_rpn_r50_fpn_1x_val2017.pkl',
+ pipeline=test_pipeline))
+optimizer_config = dict(
+ _delete_=True, grad_clip=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f585dc355ac7dc10e75875f6b9f739fe669912bb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './ga-faster-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6cd44de557bfb20b4298099bd0972e3327b410cb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,64 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ rpn_head=dict(
+ _delete_=True,
+ type='GARPNHead',
+ in_channels=256,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=8,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[8],
+ strides=[4, 8, 16, 32, 64]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.14, 0.14]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.11, 0.11]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
+ roi_head=dict(
+ bbox_head=dict(bbox_coder=dict(target_stds=[0.05, 0.05, 0.1, 0.1]))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ center_ratio=0.2,
+ ignore_ratio=0.5),
+ rpn_proposal=dict(nms_post=1000, max_per_img=300),
+ rcnn=dict(
+ assigner=dict(pos_iou_thr=0.6, neg_iou_thr=0.6, min_pos_iou=0.6),
+ sampler=dict(type='RandomSampler', num=256))),
+ test_cfg=dict(
+ rpn=dict(nms_post=1000, max_per_img=300), rcnn=dict(score_thr=1e-3)))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3007fbec42016fa8c6b90ba5b0b4e772d0e865f7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,64 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ rpn_head=dict(
+ _delete_=True,
+ type='GARPNHead',
+ in_channels=256,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=8,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[8],
+ strides=[4, 8, 16, 32, 64]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.14, 0.14]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.11, 0.11]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
+ roi_head=dict(
+ bbox_head=dict(bbox_coder=dict(target_stds=[0.05, 0.05, 0.1, 0.1]))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ center_ratio=0.2,
+ ignore_ratio=0.5),
+ rpn_proposal=dict(nms_post=1000, max_per_img=300),
+ rcnn=dict(
+ assigner=dict(pos_iou_thr=0.6, neg_iou_thr=0.6, min_pos_iou=0.6),
+ sampler=dict(type='RandomSampler', num=256))),
+ test_cfg=dict(
+ rpn=dict(nms_post=1000, max_per_img=300), rcnn=dict(score_thr=1e-3)))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8a22a1ec01e66854c68968f65802dc117aa59953
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3d6aaeaa7187deaa2c0da73a89bf14980a3405db
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-faster-rcnn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9adbae55eea2311800ccbc8e01e3f41521c7040b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './ga-retinanet_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_ms-2x.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_ms-2x.py
new file mode 100644
index 0000000000000000000000000000000000000000..012e89b8338c69c4ffdf4182827a185233945288
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_ms-2x.py
@@ -0,0 +1,34 @@
+_base_ = './ga-retinanet_r101-caffe_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 960)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3.0,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b62aba62c64870977c7c8fe4021a361c8871b633
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,61 @@
+_base_ = '../retinanet/retinanet_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='GARetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.04, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.4,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ assigner=dict(neg_iou_thr=0.5, min_pos_iou=0.0),
+ center_ratio=0.2,
+ ignore_ratio=0.5))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..da39c7005b26d65cca0ae122bf078db2d8ad2786
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_r50_fpn_1x_coco.py
@@ -0,0 +1,61 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='GARetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.04, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.4,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ assigner=dict(neg_iou_thr=0.5, min_pos_iou=0.0),
+ center_ratio=0.2,
+ ignore_ratio=0.5))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..478a8e5e4a2192e23329564ac688ac40c93110dd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cb7721d3a604277977b102d431076d6d58a7d457
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-retinanet_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b375c874ac8cabf5ad29aacc51e1065d14d83ee1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = './ga-rpn_r50-caffe_fpn_1x_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..aa58426effe8bedbe9ffb907153b98d51bef5ef2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,57 @@
+_base_ = '../rpn/rpn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ rpn_head=dict(
+ _delete_=True,
+ type='GARPNHead',
+ in_channels=256,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=8,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[8],
+ strides=[4, 8, 16, 32, 64]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.14, 0.14]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.11, 0.11]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ center_ratio=0.2,
+ ignore_ratio=0.5)),
+ test_cfg=dict(rpn=dict(nms_post=1000)))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2973f272b740c8deec74f6c24798a2d80d917946
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_r50_fpn_1x_coco.py
@@ -0,0 +1,57 @@
+_base_ = '../rpn/rpn_r50_fpn_1x_coco.py'
+model = dict(
+ rpn_head=dict(
+ _delete_=True,
+ type='GARPNHead',
+ in_channels=256,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=8,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[8],
+ strides=[4, 8, 16, 32, 64]),
+ anchor_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.14, 0.14]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.07, 0.07, 0.11, 0.11]),
+ loc_filter_thr=0.01,
+ loss_loc=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_shape=dict(type='BoundedIoULoss', beta=0.2, loss_weight=1.0),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ ga_assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ ga_sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=-1,
+ center_ratio=0.2,
+ ignore_ratio=0.5)),
+ test_cfg=dict(rpn=dict(nms_post=1000)))
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..276d45d8c21fa1eba130e834671bdddd794fa1f5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-rpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f29fe9aa20054f3152e290df5ca75363dff6a4ce
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/ga-rpn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ga-rpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/guided_anchoring/metafile.yml b/grounding-dino/mmdetection/configs/guided_anchoring/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..516b3e93fc2b10fb563de1b377144da103ef4523
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/guided_anchoring/metafile.yml
@@ -0,0 +1,246 @@
+Collections:
+ - Name: Guided Anchoring
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - Guided Anchoring
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1901.03278
+ Title: 'Region Proposal by Guided Anchoring'
+ README: configs/guided_anchoring/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/dense_heads/ga_retina_head.py#L10
+ Version: v2.0.0
+
+Models:
+ - Name: ga-rpn_r50-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-rpn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.3
+ inference time (ms/im):
+ - value: 63.29
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Region Proposal
+ Dataset: COCO
+ Metrics:
+ AR@1000: 68.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r50_caffe_fpn_1x_coco/ga_rpn_r50_caffe_fpn_1x_coco_20200531-899008a6.pth
+
+ - Name: ga-rpn_r101-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-rpn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.3
+ inference time (ms/im):
+ - value: 76.92
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Region Proposal
+ Dataset: COCO
+ Metrics:
+ AR@1000: 69.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_r101_caffe_fpn_1x_coco/ga_rpn_r101_caffe_fpn_1x_coco_20200531-ca9ba8fb.pth
+
+ - Name: ga-rpn_x101-32x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-rpn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.5
+ inference time (ms/im):
+ - value: 100
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Region Proposal
+ Dataset: COCO
+ Metrics:
+ AR@1000: 70.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_32x4d_fpn_1x_coco/ga_rpn_x101_32x4d_fpn_1x_coco_20200220-c28d1b18.pth
+
+ - Name: ga-rpn_x101-64x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-rpn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 133.33
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Region Proposal
+ Dataset: COCO
+ Metrics:
+ AR@1000: 70.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_rpn_x101_64x4d_fpn_1x_coco/ga_rpn_x101_64x4d_fpn_1x_coco_20200225-3c6e1aa2.pth
+
+ - Name: ga-faster-rcnn_r50-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-faster-rcnn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r50_caffe_fpn_1x_coco/ga_faster_r50_caffe_fpn_1x_coco_20200702_000718-a11ccfe6.pth
+
+ - Name: ga-faster-rcnn_r101-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-faster-rcnn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.5
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_r101_caffe_fpn_1x_coco/ga_faster_r101_caffe_fpn_1x_coco_bbox_mAP-0.415_20200505_115528-fb82e499.pth
+
+ - Name: ga-faster-rcnn_x101-32x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-faster-rcnn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.7
+ inference time (ms/im):
+ - value: 103.09
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_32x4d_fpn_1x_coco/ga_faster_x101_32x4d_fpn_1x_coco_20200215-1ded9da3.pth
+
+ - Name: ga-faster-rcnn_x101-64x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-faster-rcnn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 11.8
+ inference time (ms/im):
+ - value: 136.99
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_faster_x101_64x4d_fpn_1x_coco/ga_faster_x101_64x4d_fpn_1x_coco_20200215-0fa7bde7.pth
+
+ - Name: ga-retinanet_r50-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-retinanet_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.5
+ inference time (ms/im):
+ - value: 59.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r50_caffe_fpn_1x_coco/ga_retinanet_r50_caffe_fpn_1x_coco_20201020-39581c6f.pth
+
+ - Name: ga-retinanet_r101-caffe_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-retinanet_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_r101_caffe_fpn_1x_coco/ga_retinanet_r101_caffe_fpn_1x_coco_20200531-6266453c.pth
+
+ - Name: ga-retinanet_x101-32x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-retinanet_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.9
+ inference time (ms/im):
+ - value: 94.34
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_32x4d_fpn_1x_coco/ga_retinanet_x101_32x4d_fpn_1x_coco_20200219-40c56caa.pth
+
+ - Name: ga-retinanet_x101-64x4d_fpn_1x_coco
+ In Collection: Guided Anchoring
+ Config: configs/guided_anchoring/ga-retinanet_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.9
+ inference time (ms/im):
+ - value: 129.87
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/guided_anchoring/ga_retinanet_x101_64x4d_fpn_1x_coco/ga_retinanet_x101_64x4d_fpn_1x_coco_20200226-ef9f7f1f.pth
diff --git a/grounding-dino/mmdetection/configs/hrnet/README.md b/grounding-dino/mmdetection/configs/hrnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..fc1ed0cc94e778ad56504b9fa8050ad8237c4c11
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/README.md
@@ -0,0 +1,101 @@
+# HRNet
+
+> [Deep High-Resolution Representation Learning for Human Pose Estimation](https://arxiv.org/abs/1902.09212)
+
+
+
+## Abstract
+
+This is an official pytorch implementation of Deep High-Resolution Representation Learning for Human Pose Estimation. In this work, we are interested in the human pose estimation problem with a focus on learning reliable high-resolution representations. Most existing methods recover high-resolution representations from low-resolution representations produced by a high-to-low resolution network. Instead, our proposed network maintains high-resolution representations through the whole process. We start from a high-resolution subnetwork as the first stage, gradually add high-to-low resolution subnetworks one by one to form more stages, and connect the mutli-resolution subnetworks in parallel. We conduct repeated multi-scale fusions such that each of the high-to-low resolution representations receives information from other parallel representations over and over, leading to rich high-resolution representations. As a result, the predicted keypoint heatmap is potentially more accurate and spatially more precise. We empirically demonstrate the effectiveness of our network through the superior pose estimation results over two benchmark datasets: the COCO keypoint detection dataset and the MPII Human Pose dataset.
+
+High-resolution representation learning plays an essential role in many vision problems, e.g., pose estimation and semantic segmentation. The high-resolution network (HRNet), recently developed for human pose estimation, maintains high-resolution representations through the whole process by connecting high-to-low resolution convolutions in parallel and produces strong high-resolution representations by repeatedly conducting fusions across parallel convolutions.
+In this paper, we conduct a further study on high-resolution representations by introducing a simple yet effective modification and apply it to a wide range of vision tasks. We augment the high-resolution representation by aggregating the (upsampled) representations from all the parallel convolutions rather than only the representation from the high-resolution convolution as done in HRNet. This simple modification leads to stronger representations, evidenced by superior results. We show top results in semantic segmentation on Cityscapes, LIP, and PASCAL Context, and facial landmark detection on AFLW, COFW, 300W, and WFLW. In addition, we build a multi-level representation from the high-resolution representation and apply it to the Faster R-CNN object detection framework and the extended frameworks. The proposed approach achieves superior results to existing single-model networks on COCO object detection.
+
+
+
+ +
+
+
+## Results and Models
+
+### Faster R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :---------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | 1x | 6.6 | 13.4 | 36.9 | [config](./faster-rcnn_hrnetv2p-w18-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_1x_coco/faster_rcnn_hrnetv2p_w18_1x_coco_20200130-56651a6d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_1x_coco/faster_rcnn_hrnetv2p_w18_1x_coco_20200130_211246.log.json) |
+| HRNetV2p-W18 | pytorch | 2x | 6.6 | - | 38.9 | [config](./faster-rcnn_hrnetv2p-w18-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_2x_coco/faster_rcnn_hrnetv2p_w18_2x_coco_20200702_085731-a4ec0611.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_2x_coco/faster_rcnn_hrnetv2p_w18_2x_coco_20200702_085731.log.json) |
+| HRNetV2p-W32 | pytorch | 1x | 9.0 | 12.4 | 40.2 | [config](./faster-rcnn_hrnetv2p-w32-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_1x_coco/faster_rcnn_hrnetv2p_w32_1x_coco_20200130-6e286425.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_1x_coco/faster_rcnn_hrnetv2p_w32_1x_coco_20200130_204442.log.json) |
+| HRNetV2p-W32 | pytorch | 2x | 9.0 | - | 41.4 | [config](./faster-rcnn_hrnetv2p-w32_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_2x_coco/faster_rcnn_hrnetv2p_w32_2x_coco_20200529_015927-976a9c15.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_2x_coco/faster_rcnn_hrnetv2p_w32_2x_coco_20200529_015927.log.json) |
+| HRNetV2p-W40 | pytorch | 1x | 10.4 | 10.5 | 41.2 | [config](./faster-rcnn_hrnetv2p-w40-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_1x_coco/faster_rcnn_hrnetv2p_w40_1x_coco_20200210-95c1f5ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_1x_coco/faster_rcnn_hrnetv2p_w40_1x_coco_20200210_125315.log.json) |
+| HRNetV2p-W40 | pytorch | 2x | 10.4 | - | 42.1 | [config](./faster-rcnn_hrnetv2p-w40_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_2x_coco/faster_rcnn_hrnetv2p_w40_2x_coco_20200512_161033-0f236ef4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_2x_coco/faster_rcnn_hrnetv2p_w40_2x_coco_20200512_161033.log.json) |
+
+### Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | 1x | 7.0 | 11.7 | 37.7 | 34.2 | [config](./mask-rcnn_hrnetv2p-w18-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_1x_coco/mask_rcnn_hrnetv2p_w18_1x_coco_20200205-1c3d78ed.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_1x_coco/mask_rcnn_hrnetv2p_w18_1x_coco_20200205_232523.log.json) |
+| HRNetV2p-W18 | pytorch | 2x | 7.0 | - | 39.8 | 36.0 | [config](./mask-rcnn_hrnetv2p-w18-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_2x_coco/mask_rcnn_hrnetv2p_w18_2x_coco_20200212-b3c825b1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_2x_coco/mask_rcnn_hrnetv2p_w18_2x_coco_20200212_134222.log.json) |
+| HRNetV2p-W32 | pytorch | 1x | 9.4 | 11.3 | 41.2 | 37.1 | [config](./mask-rcnn_hrnetv2p-w32-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_1x_coco/mask_rcnn_hrnetv2p_w32_1x_coco_20200207-b29f616e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_1x_coco/mask_rcnn_hrnetv2p_w32_1x_coco_20200207_055017.log.json) |
+| HRNetV2p-W32 | pytorch | 2x | 9.4 | - | 42.5 | 37.8 | [config](./mask-rcnn_hrnetv2p-w32-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_2x_coco/mask_rcnn_hrnetv2p_w32_2x_coco_20200213-45b75b4d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_2x_coco/mask_rcnn_hrnetv2p_w32_2x_coco_20200213_150518.log.json) |
+| HRNetV2p-W40 | pytorch | 1x | 10.9 | | 42.1 | 37.5 | [config](./mask-rcnn_hrnetv2p-w40_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_1x_coco/mask_rcnn_hrnetv2p_w40_1x_coco_20200511_015646-66738b35.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_1x_coco/mask_rcnn_hrnetv2p_w40_1x_coco_20200511_015646.log.json) |
+| HRNetV2p-W40 | pytorch | 2x | 10.9 | | 42.8 | 38.2 | [config](./mask-rcnn_hrnetv2p-w40-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_2x_coco/mask_rcnn_hrnetv2p_w40_2x_coco_20200512_163732-aed5e4ab.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_2x_coco/mask_rcnn_hrnetv2p_w40_2x_coco_20200512_163732.log.json) |
+
+### Cascade R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | 20e | 7.0 | 11.0 | 41.2 | [config](./cascade-rcnn_hrnetv2p-w18-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w18_20e_coco/cascade_rcnn_hrnetv2p_w18_20e_coco_20200210-434be9d7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w18_20e_coco/cascade_rcnn_hrnetv2p_w18_20e_coco_20200210_105632.log.json) |
+| HRNetV2p-W32 | pytorch | 20e | 9.4 | 11.0 | 43.3 | [config](./cascade-rcnn_hrnetv2p-w32-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w32_20e_coco/cascade_rcnn_hrnetv2p_w32_20e_coco_20200208-928455a4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w32_20e_coco/cascade_rcnn_hrnetv2p_w32_20e_coco_20200208_160511.log.json) |
+| HRNetV2p-W40 | pytorch | 20e | 10.8 | | 43.8 | [config](./cascade-rcnn_hrnetv2p-w40-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w40_20e_coco/cascade_rcnn_hrnetv2p_w40_20e_coco_20200512_161112-75e47b04.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w40_20e_coco/cascade_rcnn_hrnetv2p_w40_20e_coco_20200512_161112.log.json) |
+
+### Cascade Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | 20e | 8.5 | 8.5 | 41.6 | 36.4 | [config](./cascade-mask-rcnn_hrnetv2p-w18_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w18_20e_coco/cascade_mask_rcnn_hrnetv2p_w18_20e_coco_20200210-b543cd2b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w18_20e_coco/cascade_mask_rcnn_hrnetv2p_w18_20e_coco_20200210_093149.log.json) |
+| HRNetV2p-W32 | pytorch | 20e | | 8.3 | 44.3 | 38.6 | [config](./cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w32_20e_coco/cascade_mask_rcnn_hrnetv2p_w32_20e_coco_20200512_154043-39d9cf7b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w32_20e_coco/cascade_mask_rcnn_hrnetv2p_w32_20e_coco_20200512_154043.log.json) |
+| HRNetV2p-W40 | pytorch | 20e | 12.5 | | 45.1 | 39.3 | [config](./cascade-mask-rcnn_hrnetv2p-w40-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w40_20e_coco/cascade_mask_rcnn_hrnetv2p_w40_20e_coco_20200527_204922-969c4610.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w40_20e_coco/cascade_mask_rcnn_hrnetv2p_w40_20e_coco_20200527_204922.log.json) |
+
+### Hybrid Task Cascade (HTC)
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :--------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | 20e | 10.8 | 4.7 | 42.8 | 37.9 | [config](./htc_hrnetv2p-w18_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w18_20e_coco/htc_hrnetv2p_w18_20e_coco_20200210-b266988c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w18_20e_coco/htc_hrnetv2p_w18_20e_coco_20200210_182735.log.json) |
+| HRNetV2p-W32 | pytorch | 20e | 13.1 | 4.9 | 45.4 | 39.9 | [config](./htc_hrnetv2p-w32_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w32_20e_coco/htc_hrnetv2p_w32_20e_coco_20200207-7639fa12.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w32_20e_coco/htc_hrnetv2p_w32_20e_coco_20200207_193153.log.json) |
+| HRNetV2p-W40 | pytorch | 20e | 14.6 | | 46.4 | 40.8 | [config](./htc_hrnetv2p-w40_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w40_20e_coco/htc_hrnetv2p_w40_20e_coco_20200529_183411-417c4d5b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w40_20e_coco/htc_hrnetv2p_w40_20e_coco_20200529_183411.log.json) |
+
+### FCOS
+
+| Backbone | Style | GN | MS train | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----------: | :-----: | :-: | :------: | :-----: | :------: | :------------: | :----: | :--------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| HRNetV2p-W18 | pytorch | Y | N | 1x | 13.0 | 12.9 | 35.3 | [config](./fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco_20201212_100710-4ad151de.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco_20201212_100710.log.json) |
+| HRNetV2p-W18 | pytorch | Y | N | 2x | 13.0 | - | 38.2 | [config](./fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco_20201212_101110-5c575fa5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco_20201212_101110.log.json) |
+| HRNetV2p-W32 | pytorch | Y | N | 1x | 17.5 | 12.9 | 39.5 | [config](./fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco_20201211_134730-cb8055c0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco_20201211_134730.log.json) |
+| HRNetV2p-W32 | pytorch | Y | N | 2x | 17.5 | - | 40.8 | [config](./fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco_20201212_112133-77b6b9bb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco_20201212_112133.log.json) |
+| HRNetV2p-W18 | pytorch | Y | Y | 2x | 13.0 | 12.9 | 38.3 | [config](./fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco_20201212_111651-441e9d9f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco_20201212_111651.log.json) |
+| HRNetV2p-W32 | pytorch | Y | Y | 2x | 17.5 | 12.4 | 41.9 | [config](./fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco_20201212_090846-b6f2b49f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco_20201212_090846.log.json) |
+| HRNetV2p-W48 | pytorch | Y | Y | 2x | 20.3 | 10.8 | 42.7 | [config](./fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco_20201212_124752-f22d2ce5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco_20201212_124752.log.json) |
+
+**Note:**
+
+- The `28e` schedule in HTC indicates decreasing the lr at 24 and 27 epochs, with a total of 28 epochs.
+- HRNetV2 ImageNet pretrained models are in [HRNets for Image Classification](https://github.com/HRNet/HRNet-Image-Classification).
+
+## Citation
+
+```latex
+@inproceedings{SunXLW19,
+ title={Deep High-Resolution Representation Learning for Human Pose Estimation},
+ author={Ke Sun and Bin Xiao and Dong Liu and Jingdong Wang},
+ booktitle={CVPR},
+ year={2019}
+}
+
+@article{SunZJCXLMWLW19,
+ title={High-Resolution Representations for Labeling Pixels and Regions},
+ author={Ke Sun and Yang Zhao and Borui Jiang and Tianheng Cheng and Bin Xiao
+ and Dong Liu and Yadong Mu and Xinggang Wang and Wenyu Liu and Jingdong Wang},
+ journal = {CoRR},
+ volume = {abs/1904.04514},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w18_20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w18_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5ca0ebfe43b00886b22ffc426c5ac89a50f4fda6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w18_20e_coco.py
@@ -0,0 +1,11 @@
+_base_ = './cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1ffedc3916748c3c6b333023110e56895de7e4bd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py
@@ -0,0 +1,51 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256))
+# learning policy
+max_epochs = 20
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 19],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w40-20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w40-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4a51a02412871905d947bcbb648b1a24e5033f56
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-mask-rcnn_hrnetv2p-w40-20e_coco.py
@@ -0,0 +1,12 @@
+_base_ = './cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w18-20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w18-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8834c1d4ac7973a0e5ceb9f794786c0d706f343a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w18-20e_coco.py
@@ -0,0 +1,11 @@
+_base_ = './cascade-rcnn_hrnetv2p-w32-20e_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w32-20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w32-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..afeb75dbe13c5a8425924e280b250208aaec872f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w32-20e_coco.py
@@ -0,0 +1,51 @@
+_base_ = '../cascade_rcnn/cascade-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256))
+# learning policy
+max_epochs = 20
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 19],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w40-20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w40-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..66f8882a0030ae82f7a74f67963bbd1da3422a48
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/cascade-rcnn_hrnetv2p-w40-20e_coco.py
@@ -0,0 +1,12 @@
+_base_ = './cascade-rcnn_hrnetv2p-w32-20e_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ee9a698699a6674c90011b4037843560459462db
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = './faster-rcnn_hrnetv2p-w32-1x_coco.py'
+# model settings
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0b72c68f8cbbc83d16313c6d3ab3faf0ac86926f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w18-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './faster-rcnn_hrnetv2p-w18-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a27ad06c5c169c84c6368f767b79b0a817d99fa1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32-1x_coco.py
@@ -0,0 +1,37 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32_2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c9568ce65c142f86ec6181236464454106d7de99
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w32_2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './faster-rcnn_hrnetv2p-w32-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b36200230b76269a9644cc7852cec6ce62eac5c3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40-1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = './faster-rcnn_hrnetv2p-w32-1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40_2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d1b45355db1de7c649136438b91fec5199e08141
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/faster-rcnn_hrnetv2p-w40_2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './faster-rcnn_hrnetv2p-w40-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c20ca7767364e14e552b5b8af68a8124f6a1253e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py
@@ -0,0 +1,10 @@
+_base_ = './fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py'
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f5b67f6a12e294455829dddb89d05e281f2d7dc0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c5332d65d129255117f459f45369d5e13ed6653c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco.py
@@ -0,0 +1,10 @@
+_base_ = './fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py'
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..159d96d712ae047efd7988bc53ae65006291478f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py
@@ -0,0 +1,43 @@
+_base_ = '../fcos/fcos_r50-caffe_fpn_gn-head_4xb4-1x_coco.py'
+model = dict(
+ data_preprocessor=dict(
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256,
+ stride=2,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..73fd80e979d88840a57c68ca2fad6cb2e82a26bd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4c977bf31ed2fb0ef062108cea97c1cd235b89d3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py
@@ -0,0 +1,35 @@
+_base_ = './fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py'
+
+model = dict(
+ data_preprocessor=dict(
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..bb0ff6d6ce80e702f6e88b556a770345a23afca4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco.py
@@ -0,0 +1,11 @@
+_base_ = './fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w18_20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w18_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..55255d52a3541c99660dcddfba96da27c99f841d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w18_20e_coco.py
@@ -0,0 +1,10 @@
+_base_ = './htc_hrnetv2p-w32_20e_coco.py'
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w32_20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w32_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..545cb83eaca50f9d5de1fa6b3f3e569faab7d5f2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w32_20e_coco.py
@@ -0,0 +1,37 @@
+_base_ = '../htc/htc_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_20e_coco.py b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b09256a08ee16893bcc0dd6518714daece294e0d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_20e_coco.py
@@ -0,0 +1,11 @@
+_base_ = './htc_hrnetv2p-w32_20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_28e_coco.py b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_28e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1c13b58a1a0690d19239fef40915489ddaff408e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/htc_hrnetv2p-w40_28e_coco.py
@@ -0,0 +1,16 @@
+_base_ = './htc_hrnetv2p-w40_20e_coco.py'
+
+# learning policy
+max_epochs = 28
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[24, 27],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/htc_x101-64x4d_fpn_16xb1-28e_coco.py b/grounding-dino/mmdetection/configs/hrnet/htc_x101-64x4d_fpn_16xb1-28e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1f1304e5f963351667c28cb264ca5434bc81f744
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/htc_x101-64x4d_fpn_16xb1-28e_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../htc/htc_x101-64x4d_fpn_16xb1-20e_coco.py'
+
+# learning policy
+max_epochs = 28
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[24, 27],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5d5a463a66bed51d73a42eafffea654a18c111ce
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-1x_coco.py
@@ -0,0 +1,10 @@
+_base_ = './mask-rcnn_hrnetv2p-w32-1x_coco.py'
+model = dict(
+ backbone=dict(
+ extra=dict(
+ stage2=dict(num_channels=(18, 36)),
+ stage3=dict(num_channels=(18, 36, 72)),
+ stage4=dict(num_channels=(18, 36, 72, 144))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w18')),
+ neck=dict(type='HRFPN', in_channels=[18, 36, 72, 144], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8abc55924a3eb8e06f9e1e5eeed503890542f6f6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w18-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './mask-rcnn_hrnetv2p-w18-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..208b037807dfa9cab1d33ac58ac785ff72e400c1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-1x_coco.py
@@ -0,0 +1,37 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='HRNet',
+ extra=dict(
+ stage1=dict(
+ num_modules=1,
+ num_branches=1,
+ block='BOTTLENECK',
+ num_blocks=(4, ),
+ num_channels=(64, )),
+ stage2=dict(
+ num_modules=1,
+ num_branches=2,
+ block='BASIC',
+ num_blocks=(4, 4),
+ num_channels=(32, 64)),
+ stage3=dict(
+ num_modules=4,
+ num_branches=3,
+ block='BASIC',
+ num_blocks=(4, 4, 4),
+ num_channels=(32, 64, 128)),
+ stage4=dict(
+ num_modules=3,
+ num_branches=4,
+ block='BASIC',
+ num_blocks=(4, 4, 4, 4),
+ num_channels=(32, 64, 128, 256))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w32')),
+ neck=dict(
+ _delete_=True,
+ type='HRFPN',
+ in_channels=[32, 64, 128, 256],
+ out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d3741c820a6a0ca622ce6bbf80cb3e922107efb6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w32-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './mask-rcnn_hrnetv2p-w32-1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40-2x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..360420c56d42814ed6f4d84775f1a19dfa96574a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './mask-rcnn_hrnetv2p-w40_1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40_1x_coco.py b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..36e2305a520fd8305f9fd1358f5cbcb01027e40d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/mask-rcnn_hrnetv2p-w40_1x_coco.py
@@ -0,0 +1,11 @@
+_base_ = './mask-rcnn_hrnetv2p-w18-1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='HRNet',
+ extra=dict(
+ stage2=dict(num_channels=(40, 80)),
+ stage3=dict(num_channels=(40, 80, 160)),
+ stage4=dict(num_channels=(40, 80, 160, 320))),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://msra/hrnetv2_w40')),
+ neck=dict(type='HRFPN', in_channels=[40, 80, 160, 320], out_channels=256))
diff --git a/grounding-dino/mmdetection/configs/hrnet/metafile.yml b/grounding-dino/mmdetection/configs/hrnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..54c624793291dc9a713c9a6fa6df50499136768c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/hrnet/metafile.yml
@@ -0,0 +1,971 @@
+Models:
+ - Name: faster-rcnn_hrnetv2p-w18-1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w18-1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.6
+ inference time (ms/im):
+ - value: 74.63
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_1x_coco/faster_rcnn_hrnetv2p_w18_1x_coco_20200130-56651a6d.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: faster-rcnn_hrnetv2p-w18-2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w18-2x_coco.py
+ Metadata:
+ Training Memory (GB): 6.6
+ inference time (ms/im):
+ - value: 74.63
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w18_2x_coco/faster_rcnn_hrnetv2p_w18_2x_coco_20200702_085731-a4ec0611.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: faster-rcnn_hrnetv2p-w32-1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w32-1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.0
+ inference time (ms/im):
+ - value: 80.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_1x_coco/faster_rcnn_hrnetv2p_w32_1x_coco_20200130-6e286425.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: faster-rcnn_hrnetv2p-w32_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w32_2x_coco.py
+ Metadata:
+ Training Memory (GB): 9.0
+ inference time (ms/im):
+ - value: 80.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w32_2x_coco/faster_rcnn_hrnetv2p_w32_2x_coco_20200529_015927-976a9c15.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: faster-rcnn_hrnetv2p-w40-1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w40-1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.4
+ inference time (ms/im):
+ - value: 95.24
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_1x_coco/faster_rcnn_hrnetv2p_w40_1x_coco_20200210-95c1f5ce.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: faster-rcnn_hrnetv2p-w40_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/hrnet/faster-rcnn_hrnetv2p-w40_2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.4
+ inference time (ms/im):
+ - value: 95.24
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/faster_rcnn_hrnetv2p_w40_2x_coco/faster_rcnn_hrnetv2p_w40_2x_coco_20200512_161033-0f236ef4.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w18-1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w18-1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 85.47
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_1x_coco/mask_rcnn_hrnetv2p_w18_1x_coco_20200205-1c3d78ed.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w18-2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w18-2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 85.47
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w18_2x_coco/mask_rcnn_hrnetv2p_w18_2x_coco_20200212-b3c825b1.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w32-1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w32-1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.4
+ inference time (ms/im):
+ - value: 88.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_1x_coco/mask_rcnn_hrnetv2p_w32_1x_coco_20200207-b29f616e.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w32-2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w32-2x_coco.py
+ Metadata:
+ Training Memory (GB): 9.4
+ inference time (ms/im):
+ - value: 88.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w32_2x_coco/mask_rcnn_hrnetv2p_w32_2x_coco_20200213-45b75b4d.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w40_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w40_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.9
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_1x_coco/mask_rcnn_hrnetv2p_w40_1x_coco_20200511_015646-66738b35.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: mask-rcnn_hrnetv2p-w40-2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/hrnet/mask-rcnn_hrnetv2p-w40-2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.9
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/mask_rcnn_hrnetv2p_w40_2x_coco/mask_rcnn_hrnetv2p_w40_2x_coco_20200512_163732-aed5e4ab.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-rcnn_hrnetv2p-w18-20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-rcnn_hrnetv2p-w18-20e_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 90.91
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w18_20e_coco/cascade_rcnn_hrnetv2p_w18_20e_coco_20200210-434be9d7.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-rcnn_hrnetv2p-w32-20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-rcnn_hrnetv2p-w32-20e_coco.py
+ Metadata:
+ Training Memory (GB): 9.4
+ inference time (ms/im):
+ - value: 90.91
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w32_20e_coco/cascade_rcnn_hrnetv2p_w32_20e_coco_20200208-928455a4.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-rcnn_hrnetv2p-w40-20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-rcnn_hrnetv2p-w40-20e_coco.py
+ Metadata:
+ Training Memory (GB): 10.8
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_rcnn_hrnetv2p_w40_20e_coco/cascade_rcnn_hrnetv2p_w40_20e_coco_20200512_161112-75e47b04.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-mask-rcnn_hrnetv2p-w18_20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-mask-rcnn_hrnetv2p-w18_20e_coco.py
+ Metadata:
+ Training Memory (GB): 8.5
+ inference time (ms/im):
+ - value: 117.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w18_20e_coco/cascade_mask_rcnn_hrnetv2p_w18_20e_coco_20200210-b543cd2b.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-mask-rcnn_hrnetv2p-w32_20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-mask-rcnn_hrnetv2p-w32_20e_coco.py
+ Metadata:
+ inference time (ms/im):
+ - value: 120.48
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w32_20e_coco/cascade_mask_rcnn_hrnetv2p_w32_20e_coco_20200512_154043-39d9cf7b.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: cascade-mask-rcnn_hrnetv2p-w40-20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/hrnet/cascade-mask-rcnn_hrnetv2p-w40-20e_coco.py
+ Metadata:
+ Training Memory (GB): 12.5
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/cascade_mask_rcnn_hrnetv2p_w40_20e_coco/cascade_mask_rcnn_hrnetv2p_w40_20e_coco_20200527_204922-969c4610.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: htc_hrnetv2p-w18_20e_coco
+ In Collection: HTC
+ Config: configs/hrnet/htc_hrnetv2p-w18_20e_coco.py
+ Metadata:
+ Training Memory (GB): 10.8
+ inference time (ms/im):
+ - value: 212.77
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w18_20e_coco/htc_hrnetv2p_w18_20e_coco_20200210-b266988c.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: htc_hrnetv2p-w32_20e_coco
+ In Collection: HTC
+ Config: configs/hrnet/htc_hrnetv2p-w32_20e_coco.py
+ Metadata:
+ Training Memory (GB): 13.1
+ inference time (ms/im):
+ - value: 204.08
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w32_20e_coco/htc_hrnetv2p_w32_20e_coco_20200207-7639fa12.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: htc_hrnetv2p-w40_20e_coco
+ In Collection: HTC
+ Config: configs/hrnet/htc_hrnetv2p-w40_20e_coco.py
+ Metadata:
+ Training Memory (GB): 14.6
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/htc_hrnetv2p_w40_20e_coco/htc_hrnetv2p_w40_20e_coco_20200529_183411-417c4d5b.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-1x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 13.0
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 35.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco/fcos_hrnetv2p_w18_gn-head_4x4_1x_coco_20201212_100710-4ad151de.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w18-gn-head_4xb4-2x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 13.0
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_4x4_2x_coco_20201212_101110-5c575fa5.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-1x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 17.5
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco/fcos_hrnetv2p_w32_gn-head_4x4_1x_coco_20201211_134730-cb8055c0.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w32-gn-head_4xb4-2x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 17.5
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_4x4_2x_coco_20201212_112133-77b6b9bb.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w18-gn-head_ms-640-800-4xb4-2x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 13.0
+ inference time (ms/im):
+ - value: 77.52
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w18_gn-head_mstrain_640-800_4x4_2x_coco_20201212_111651-441e9d9f.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w32-gn-head_ms-640-800-4xb4-2x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 17.5
+ inference time (ms/im):
+ - value: 80.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w32_gn-head_mstrain_640-800_4x4_2x_coco_20201212_090846-b6f2b49f.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
+
+ - Name: fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco
+ In Collection: FCOS
+ Config: configs/hrnet/fcos_hrnetv2p-w40-gn-head_ms-640-800-4xb4-2x_coco.py
+ Metadata:
+ Training Resources: 4x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 20.3
+ inference time (ms/im):
+ - value: 92.59
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Architecture:
+ - HRNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/hrnet/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco/fcos_hrnetv2p_w40_gn-head_mstrain_640-800_4x4_2x_coco_20201212_124752-f22d2ce5.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.04514
+ Title: 'Deep High-Resolution Representation Learning for Visual Recognition'
+ README: configs/hrnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/backbones/hrnet.py#L195
+ Version: v2.0.0
diff --git a/grounding-dino/mmdetection/configs/htc/README.md b/grounding-dino/mmdetection/configs/htc/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a6b77ce4754f5f88e6effcd47dcdbbe4cd739757
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/README.md
@@ -0,0 +1,67 @@
+# HTC
+
+> [Hybrid Task Cascade for Instance Segmentation](https://arxiv.org/abs/1901.07518)
+
+
+
+## Abstract
+
+Cascade is a classic yet powerful architecture that has boosted performance on various tasks. However, how to introduce cascade to instance segmentation remains an open question. A simple combination of Cascade R-CNN and Mask R-CNN only brings limited gain. In exploring a more effective approach, we find that the key to a successful instance segmentation cascade is to fully leverage the reciprocal relationship between detection and segmentation. In this work, we propose a new framework, Hybrid Task Cascade (HTC), which differs in two important aspects: (1) instead of performing cascaded refinement on these two tasks separately, it interweaves them for a joint multi-stage processing; (2) it adopts a fully convolutional branch to provide spatial context, which can help distinguishing hard foreground from cluttered background. Overall, this framework can learn more discriminative features progressively while integrating complementary features together in each stage. Without bells and whistles, a single HTC obtains 38.4 and 1.5 improvement over a strong Cascade Mask R-CNN baseline on MSCOCO dataset. Moreover, our overall system achieves 48.6 mask AP on the test-challenge split, ranking 1st in the COCO 2018 Challenge Object Detection Task.
+
+
+
+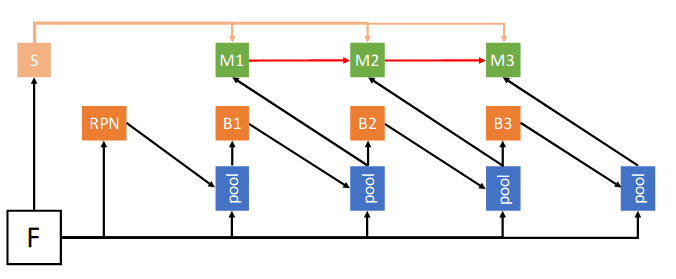 +
+
+
+## Introduction
+
+HTC requires COCO and [COCO-stuff](http://calvin.inf.ed.ac.uk/wp-content/uploads/data/cocostuffdataset/stuffthingmaps_trainval2017.zip) dataset for training. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+| | ├── stuffthingmaps
+```
+
+## Results and Models
+
+The results on COCO 2017val are shown in the below table. (results on test-dev are usually slightly higher than val)
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :----------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 8.2 | 5.8 | 42.3 | 37.4 | [config](./htc_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_1x_coco/htc_r50_fpn_1x_coco_20200317-7332cf16.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_1x_coco/htc_r50_fpn_1x_coco_20200317_070435.log.json) |
+| R-50-FPN | pytorch | 20e | 8.2 | - | 43.3 | 38.3 | [config](./htc_r50_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_20e_coco/htc_r50_fpn_20e_coco_20200319-fe28c577.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_20e_coco/htc_r50_fpn_20e_coco_20200319_070313.log.json) |
+| R-101-FPN | pytorch | 20e | 10.2 | 5.5 | 44.8 | 39.6 | [config](./htc_r101_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r101_fpn_20e_coco/htc_r101_fpn_20e_coco_20200317-9b41b48f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r101_fpn_20e_coco/htc_r101_fpn_20e_coco_20200317_153107.log.json) |
+| X-101-32x4d-FPN | pytorch | 20e | 11.4 | 5.0 | 46.1 | 40.5 | [config](./htc_x101-32x4d_fpn_16xb1-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_32x4d_fpn_16x1_20e_coco/htc_x101_32x4d_fpn_16x1_20e_coco_20200318-de97ae01.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_32x4d_fpn_16x1_20e_coco/htc_x101_32x4d_fpn_16x1_20e_coco_20200318_034519.log.json) |
+| X-101-64x4d-FPN | pytorch | 20e | 14.5 | 4.4 | 47.0 | 41.4 | [config](./htc_x101-64x4d_fpn_16xb1-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_16x1_20e_coco/htc_x101_64x4d_fpn_16x1_20e_coco_20200318-b181fd7a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_16x1_20e_coco/htc_x101_64x4d_fpn_16x1_20e_coco_20200318_081711.log.json) |
+
+- In the HTC paper and COCO 2018 Challenge, `score_thr` is set to 0.001 for both baselines and HTC.
+- We use 8 GPUs with 2 images/GPU for R-50 and R-101 models, and 16 GPUs with 1 image/GPU for X-101 models.
+ If you would like to train X-101 HTC with 8 GPUs, you need to change the lr from 0.02 to 0.01.
+
+We also provide a powerful HTC with DCN and multi-scale training model. No testing augmentation is used.
+
+| Backbone | Style | DCN | training scales | Lr schd | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :---: | :-------------: | :-----: | :----: | :-----: | :----------------------------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| X-101-64x4d-FPN | pytorch | c3-c5 | 400~1400 | 20e | 50.4 | 43.8 | [config](./htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco_20200312-946fd751.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco_20200312_203410.log.json) |
+
+## Citation
+
+We provide config files to reproduce the results in the CVPR 2019 paper for [Hybrid Task Cascade](https://arxiv.org/abs/1901.07518).
+
+```latex
+@inproceedings{chen2019hybrid,
+ title={Hybrid task cascade for instance segmentation},
+ author={Chen, Kai and Pang, Jiangmiao and Wang, Jiaqi and Xiong, Yu and Li, Xiaoxiao and Sun, Shuyang and Feng, Wansen and Liu, Ziwei and Shi, Jianping and Ouyang, Wanli and Chen Change Loy and Dahua Lin},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/htc/htc-without-semantic_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/htc/htc-without-semantic_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..791f4eb25b53e122cd4876a71e84a4a9d2f67e26
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc-without-semantic_r50_fpn_1x_coco.py
@@ -0,0 +1,223 @@
+_base_ = [
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ type='HybridTaskCascade',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ type='RPNHead',
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0]),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='HybridTaskCascadeRoIHead',
+ interleaved=True,
+ mask_info_flow=True,
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_head=[
+ dict(
+ type='HTCMaskHead',
+ with_conv_res=False,
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0)),
+ dict(
+ type='HTCMaskHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0)),
+ dict(
+ type='HTCMaskHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))
+ ]),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.3,
+ min_pos_iou=0.3,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=False),
+ allowed_border=0,
+ pos_weight=-1,
+ debug=False),
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.6,
+ neg_iou_thr=0.6,
+ min_pos_iou=0.6,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False),
+ dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.7,
+ min_pos_iou=0.7,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ mask_size=28,
+ pos_weight=-1,
+ debug=False)
+ ]),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=1000,
+ max_per_img=1000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ score_thr=0.001,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100,
+ mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/htc/htc_r101_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/htc/htc_r101_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..28091aad31029109c29941404f2c3cc47f9c1092
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_r101_fpn_20e_coco.py
@@ -0,0 +1,6 @@
+_base_ = './htc_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3573f1f698095585f4a1de692d0e45a21429822e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_1x_coco.py
@@ -0,0 +1,33 @@
+_base_ = './htc-without-semantic_r50_fpn_1x_coco.py'
+model = dict(
+ data_preprocessor=dict(pad_seg=True),
+ roi_head=dict(
+ semantic_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[8]),
+ semantic_head=dict(
+ type='FusedSemanticHead',
+ num_ins=5,
+ fusion_level=1,
+ seg_scale_factor=1 / 8,
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=183,
+ loss_seg=dict(
+ type='CrossEntropyLoss', ignore_index=255, loss_weight=0.2))))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations', with_bbox=True, with_mask=True, with_seg=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(
+ dataset=dict(
+ data_prefix=dict(img='train2017/', seg='stuffthingmaps/train2017/'),
+ pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9f510fa6eec210381707f4d1b01264e72e0d0f76
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_r50_fpn_20e_coco.py
@@ -0,0 +1,16 @@
+_base_ = './htc_r50_fpn_1x_coco.py'
+
+# learning policy
+max_epochs = 20
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 19],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/htc/htc_x101-32x4d_fpn_16xb1-20e_coco.py b/grounding-dino/mmdetection/configs/htc/htc_x101-32x4d_fpn_16xb1-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..396d3a0e2b72acc1d9601706ec4629720a46a738
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_x101-32x4d_fpn_16xb1-20e_coco.py
@@ -0,0 +1,32 @@
+_base_ = './htc_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
+
+train_dataloader = dict(batch_size=1, num_workers=1)
+
+# learning policy
+max_epochs = 20
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 19],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco.py b/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..26d68e7e2cda2a711e4d16899ae85b100afc60a0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco.py
@@ -0,0 +1,20 @@
+_base_ = './htc_x101-64x4d_fpn_16xb1-20e_coco.py'
+
+model = dict(
+ backbone=dict(
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='LoadAnnotations', with_bbox=True, with_mask=True, with_seg=True),
+ dict(
+ type='RandomResize',
+ scale=[(1600, 400), (1600, 1400)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d_fpn_16xb1-20e_coco.py b/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d_fpn_16xb1-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a600ddb0ebd2287cdaa0d00a6008db636d79be76
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/htc_x101-64x4d_fpn_16xb1-20e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './htc_x101-32x4d_fpn_16xb1-20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ groups=64,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/htc/metafile.yml b/grounding-dino/mmdetection/configs/htc/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2f0f74d2d06a0f6053fa7f0b9bb73024f8dcaac5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/htc/metafile.yml
@@ -0,0 +1,165 @@
+Collections:
+ - Name: HTC
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - HTC
+ - RPN
+ - ResNet
+ - ResNeXt
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/1901.07518
+ Title: 'Hybrid Task Cascade for Instance Segmentation'
+ README: configs/htc/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/htc.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: htc_r50_fpn_1x_coco
+ In Collection: HTC
+ Config: configs/htc/htc_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.2
+ inference time (ms/im):
+ - value: 172.41
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_1x_coco/htc_r50_fpn_1x_coco_20200317-7332cf16.pth
+
+ - Name: htc_r50_fpn_20e_coco
+ In Collection: HTC
+ Config: configs/htc/htc_r50_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 8.2
+ inference time (ms/im):
+ - value: 172.41
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r50_fpn_20e_coco/htc_r50_fpn_20e_coco_20200319-fe28c577.pth
+
+ - Name: htc_r101_fpn_20e_coco
+ In Collection: HTC
+ Config: configs/htc/htc_r101_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 10.2
+ inference time (ms/im):
+ - value: 181.82
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_r101_fpn_20e_coco/htc_r101_fpn_20e_coco_20200317-9b41b48f.pth
+
+ - Name: htc_x101-32x4d_fpn_16xb1-20e_coco
+ In Collection: HTC
+ Config: configs/htc/htc_x101-32x4d_fpn_16xb1-20e_coco.py
+ Metadata:
+ Training Resources: 16x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 11.4
+ inference time (ms/im):
+ - value: 200
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_32x4d_fpn_16x1_20e_coco/htc_x101_32x4d_fpn_16x1_20e_coco_20200318-de97ae01.pth
+
+ - Name: htc_x101-64x4d_fpn_16xb1-20e_coco
+ In Collection: HTC
+ Config: configs/htc/htc_x101-64x4d_fpn_16xb1-20e_coco.py
+ Metadata:
+ Training Resources: 16x V100 GPUs
+ Batch Size: 16
+ Training Memory (GB): 14.5
+ inference time (ms/im):
+ - value: 227.27
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_16x1_20e_coco/htc_x101_64x4d_fpn_16x1_20e_coco_20200318-b181fd7a.pth
+
+ - Name: htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco
+ In Collection: HTC
+ Config: configs/htc/htc_x101-64x4d-dconv-c3-c5_fpn_ms-400-1400-16xb1-20e_coco.py
+ Metadata:
+ Training Resources: 16x V100 GPUs
+ Batch Size: 16
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 43.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/htc/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco/htc_x101_64x4d_fpn_dconv_c3-c5_mstrain_400_1400_16x1_20e_coco_20200312-946fd751.pth
diff --git a/grounding-dino/mmdetection/configs/instaboost/README.md b/grounding-dino/mmdetection/configs/instaboost/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..34132341833308e2d5d3dcb65bd5d8ba0b4e23bd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/README.md
@@ -0,0 +1,58 @@
+# Instaboost
+
+> [Instaboost: Boosting instance segmentation via probability map guided copy-pasting](https://arxiv.org/abs/1908.07801)
+
+
+
+## Abstract
+
+Instance segmentation requires a large number of training samples to achieve satisfactory performance and benefits from proper data augmentation. To enlarge the training set and increase the diversity, previous methods have investigated using data annotation from other domain (e.g. bbox, point) in a weakly supervised mechanism. In this paper, we present a simple, efficient and effective method to augment the training set using the existing instance mask annotations. Exploiting the pixel redundancy of the background, we are able to improve the performance of Mask R-CNN for 1.7 mAP on COCO dataset and 3.3 mAP on Pascal VOC dataset by simply introducing random jittering to objects. Furthermore, we propose a location probability map based approach to explore the feasible locations that objects can be placed based on local appearance similarity. With the guidance of such map, we boost the performance of R101-Mask R-CNN on instance segmentation from 35.7 mAP to 37.9 mAP without modifying the backbone or network structure. Our method is simple to implement and does not increase the computational complexity. It can be integrated into the training pipeline of any instance segmentation model without affecting the training and inference efficiency.
+
+
+
+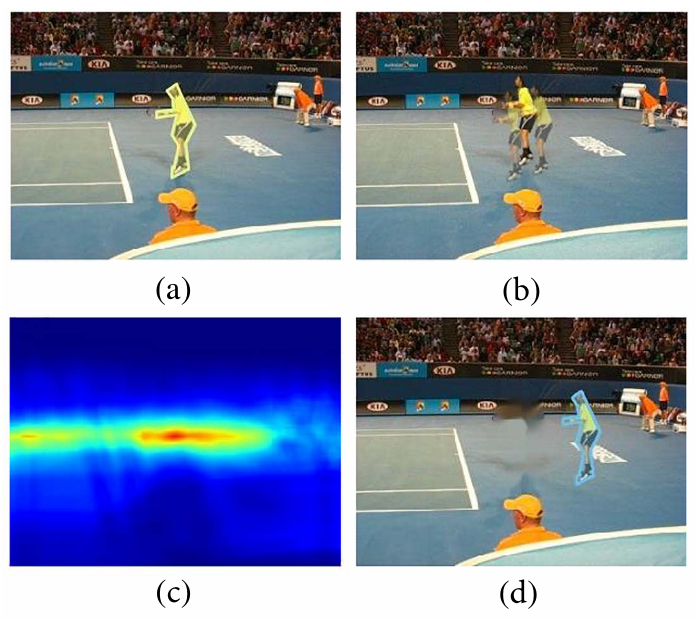 +
+
+
+## Introduction
+
+Configs in this directory is the implementation for ICCV2019 paper "InstaBoost: Boosting Instance Segmentation Via Probability Map Guided Copy-Pasting" and provided by the authors of the paper. InstaBoost is a data augmentation method for object detection and instance segmentation. The paper has been released on [`arXiv`](https://arxiv.org/abs/1908.07801).
+
+## Usage
+
+### Requirements
+
+You need to install `instaboostfast` before using it.
+
+```shell
+pip install instaboostfast
+```
+
+The code and more details can be found [here](https://github.com/GothicAi/Instaboost).
+
+### Integration with MMDetection
+
+InstaBoost have been already integrated in the data pipeline, thus all you need is to add or change **InstaBoost** configurations after **LoadImageFromFile**. We have provided examples like [this](mask_rcnn_r50_fpn_instaboost_4x#L121). You can refer to [`InstaBoostConfig`](https://github.com/GothicAi/InstaBoost-pypi#instaboostconfig) for more details.
+
+## Results and Models
+
+- All models were trained on `coco_2017_train` and tested on `coco_2017_val` for convenience of evaluation and comparison. In the paper, the results are obtained from `test-dev`.
+- To balance accuracy and training time when using InstaBoost, models released in this page are all trained for 48 Epochs. Other training and testing configs strictly follow the original framework.
+- For results and models in MMDetection V1.x, please refer to [Instaboost](https://github.com/GothicAi/Instaboost).
+
+| Network | Backbone | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-----------: | :-------------: | :-----: | :------: | :------------: | :----: | :-----: | :---------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Mask R-CNN | R-50-FPN | 4x | 4.4 | 17.5 | 40.6 | 36.6 | [config](./mask-rcnn_r50_fpn_instaboost-4x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r50_fpn_instaboost_4x_coco/mask_rcnn_r50_fpn_instaboost_4x_coco_20200307-d025f83a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r50_fpn_instaboost_4x_coco/mask_rcnn_r50_fpn_instaboost_4x_coco_20200307_223635.log.json) |
+| Mask R-CNN | R-101-FPN | 4x | 6.4 | | 42.5 | 38.0 | [config](./mask-rcnn_r101_fpn_instaboost-4x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r101_fpn_instaboost_4x_coco/mask_rcnn_r101_fpn_instaboost_4x_coco_20200703_235738-f23f3a5f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r101_fpn_instaboost_4x_coco/mask_rcnn_r101_fpn_instaboost_4x_coco_20200703_235738.log.json) |
+| Mask R-CNN | X-101-64x4d-FPN | 4x | 10.7 | | 44.7 | 39.7 | [config](./mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco_20200515_080947-8ed58c1b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco_20200515_080947.log.json) |
+| Cascade R-CNN | R-101-FPN | 4x | 6.0 | 12.0 | 43.7 | 38.0 | [config](./cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/instaboost/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco_20200307-c19d98d9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/instaboost/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco_20200307_223646.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{fang2019instaboost,
+ title={Instaboost: Boosting instance segmentation via probability map guided copy-pasting},
+ author={Fang, Hao-Shu and Sun, Jianhua and Wang, Runzhong and Gou, Minghao and Li, Yong-Lu and Lu, Cewu},
+ booktitle={Proceedings of the IEEE International Conference on Computer Vision},
+ pages={682--691},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r101_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r101_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..53e33b890cad86fcc64e6ea6eefe39138241c8e7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r101_fpn_instaboost-4x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f7736cf5756676944c543b7e8412997ac81c2745
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py
@@ -0,0 +1,40 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_r50_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='InstaBoost',
+ action_candidate=('normal', 'horizontal', 'skip'),
+ action_prob=(1, 0, 0),
+ scale=(0.8, 1.2),
+ dx=15,
+ dy=15,
+ theta=(-1, 1),
+ color_prob=0.5,
+ hflag=False,
+ aug_ratio=0.5),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+max_epochs = 48
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[32, 44],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+
+# only keep latest 3 checkpoints
+default_hooks = dict(checkpoint=dict(max_keep_ckpts=3))
diff --git a/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c7938d9e00e3a9c030b788ca83b1a6ddee208aed
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/cascade-mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r101_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r101_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..55bfa9fefa4db9d6d69fb3c4a285d04592168398
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r101_fpn_instaboost-4x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_instaboost-4x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r50_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r50_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0a8c9be81f03f98f97975aca47922575555e3844
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_r50_fpn_instaboost-4x_coco.py
@@ -0,0 +1,40 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='InstaBoost',
+ action_candidate=('normal', 'horizontal', 'skip'),
+ action_prob=(1, 0, 0),
+ scale=(0.8, 1.2),
+ dx=15,
+ dy=15,
+ theta=(-1, 1),
+ color_prob=0.5,
+ hflag=False,
+ aug_ratio=0.5),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+max_epochs = 48
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[32, 44],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+
+# only keep latest 3 checkpoints
+default_hooks = dict(checkpoint=dict(max_keep_ckpts=3))
diff --git a/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9ba2ada6011dd77ea2dcac2133bef8d92e522381
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r50_fpn_instaboost-4x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/instaboost/metafile.yml b/grounding-dino/mmdetection/configs/instaboost/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..228f31b7301e6a5f9d2206e10be07bc7ea3b70be
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/instaboost/metafile.yml
@@ -0,0 +1,99 @@
+Collections:
+ - Name: InstaBoost
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - InstaBoost
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Paper:
+ URL: https://arxiv.org/abs/1908.07801
+ Title: 'Instaboost: Boosting instance segmentation via probability map guided copy-pasting'
+ README: configs/instaboost/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/datasets/pipelines/instaboost.py#L7
+ Version: v2.0.0
+
+Models:
+ - Name: mask-rcnn_r50_fpn_instaboost_4x_coco
+ In Collection: InstaBoost
+ Config: configs/instaboost/mask-rcnn_r50_fpn_instaboost-4x_coco.py
+ Metadata:
+ Training Memory (GB): 4.4
+ inference time (ms/im):
+ - value: 57.14
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 48
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r50_fpn_instaboost_4x_coco/mask_rcnn_r50_fpn_instaboost_4x_coco_20200307-d025f83a.pth
+
+ - Name: mask-rcnn_r101_fpn_instaboost-4x_coco
+ In Collection: InstaBoost
+ Config: configs/instaboost/mask-rcnn_r101_fpn_instaboost-4x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ Epochs: 48
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_r101_fpn_instaboost_4x_coco/mask_rcnn_r101_fpn_instaboost_4x_coco_20200703_235738-f23f3a5f.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco
+ In Collection: InstaBoost
+ Config: configs/instaboost/mask-rcnn_x101-64x4d_fpn_instaboost-4x_coco.py
+ Metadata:
+ Training Memory (GB): 10.7
+ Epochs: 48
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/instaboost/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco/mask_rcnn_x101_64x4d_fpn_instaboost_4x_coco_20200515_080947-8ed58c1b.pth
+
+ - Name: cascade-mask-rcnn_r50_fpn_instaboost_4x_coco
+ In Collection: InstaBoost
+ Config: configs/instaboost/cascade-mask-rcnn_r50_fpn_instaboost-4x_coco.py
+ Metadata:
+ Training Memory (GB): 6.0
+ inference time (ms/im):
+ - value: 83.33
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 48
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/instaboost/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco/cascade_mask_rcnn_r50_fpn_instaboost_4x_coco_20200307-c19d98d9.pth
diff --git a/grounding-dino/mmdetection/configs/lad/README.md b/grounding-dino/mmdetection/configs/lad/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..3c3b6b4bb4d9a86d87c7843dabb23b4e5d0abc66
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lad/README.md
@@ -0,0 +1,45 @@
+# LAD
+
+> [Improving Object Detection by Label Assignment Distillation](https://arxiv.org/abs/2108.10520)
+
+
+
+## Abstract
+
+Label assignment in object detection aims to assign targets, foreground or background, to sampled regions in an image. Unlike labeling for image classification, this problem is not well defined due to the object's bounding box. In this paper, we investigate the problem from a perspective of distillation, hence we call Label Assignment Distillation (LAD). Our initial motivation is very simple, we use a teacher network to generate labels for the student. This can be achieved in two ways: either using the teacher's prediction as the direct targets (soft label), or through the hard labels dynamically assigned by the teacher (LAD). Our experiments reveal that: (i) LAD is more effective than soft-label, but they are complementary. (ii) Using LAD, a smaller teacher can also improve a larger student significantly, while soft-label can't. We then introduce Co-learning LAD, in which two networks simultaneously learn from scratch and the role of teacher and student are dynamically interchanged. Using PAA-ResNet50 as a teacher, our LAD techniques can improve detectors PAA-ResNet101 and PAA-ResNeXt101 to 46AP and 47.5AP on the COCO test-dev set. With a stronger teacher PAA-SwinB, we improve the students PAA-ResNet50 to 43.7AP by only 1x schedule training and standard setting, and PAA-ResNet101 to 47.9AP, significantly surpassing the current methods.
+
+
+
+ +
+
+
+## Results and Models
+
+We provide config files to reproduce the object detection results in the
+WACV 2022 paper for Improving Object Detection by Label Assignment
+Distillation.
+
+### PAA with LAD
+
+| Teacher | Student | Training schedule | AP (val) | Config | Download |
+| :-----: | :-----: | :---------------: | :------: | :----------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| -- | R-50 | 1x | 40.4 | [config](../paa/paa_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.log.json) |
+| -- | R-101 | 1x | 42.6 | [config](../paa/paa_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.log.json) |
+| R-101 | R-50 | 1x | 41.4 | [config](./lad_r50-paa-r101_fpn_2xb8_coco_1x.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r50_paa_r101_fpn_coco_1x/lad_r50_paa_r101_fpn_coco_1x_20220708_124246-74c76ff0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r50_paa_r101_fpn_coco_1x/lad_r50_paa_r101_fpn_coco_1x_20220708_124246.log.json) |
+| R-50 | R-101 | 1x | 43.2 | [config](./lad_r101-paa-r50_fpn_2xb8_coco_1x.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r101_paa_r50_fpn_coco_1x/lad_r101_paa_r50_fpn_coco_1x_20220708_124357-9407ac54.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r101_paa_r50_fpn_coco_1x/lad_r101_paa_r50_fpn_coco_1x_20220708_124357.log.json) |
+
+## Note
+
+- Meaning of Config name: lad_r50(student model)\_paa(based on paa)\_r101(teacher model)\_fpn(neck)\_coco(dataset)\_1x(12 epoch).py
+- Results may fluctuate by about 0.2 mAP.
+- 2 GPUs are used, 8 samples per GPU.
+
+## Citation
+
+```latex
+@inproceedings{nguyen2021improving,
+ title={Improving Object Detection by Label Assignment Distillation},
+ author={Chuong H. Nguyen and Thuy C. Nguyen and Tuan N. Tang and Nam L. H. Phan},
+ booktitle = {WACV},
+ year={2022}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/lad/lad_r101-paa-r50_fpn_2xb8_coco_1x.py b/grounding-dino/mmdetection/configs/lad/lad_r101-paa-r50_fpn_2xb8_coco_1x.py
new file mode 100644
index 0000000000000000000000000000000000000000..d61d08638a073f3dad71d7499221e3ef62ff90f3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lad/lad_r101-paa-r50_fpn_2xb8_coco_1x.py
@@ -0,0 +1,127 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+teacher_ckpt = 'https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.pth' # noqa
+
+model = dict(
+ type='LAD',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ # student
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='LADHead',
+ reg_decoded_bbox=True,
+ score_voting=True,
+ topk=9,
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.3),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=0.5)),
+ # teacher
+ teacher_ckpt=teacher_ckpt,
+ teacher_backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch'),
+ teacher_neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ teacher_bbox_head=dict(
+ type='LADHead',
+ reg_decoded_bbox=True,
+ score_voting=True,
+ topk=9,
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.3),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=0.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.1,
+ neg_iou_thr=0.1,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ score_voting=True,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+train_dataloader = dict(batch_size=8, num_workers=4)
+optim_wrapper = dict(type='AmpOptimWrapper', optimizer=dict(lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/lad/lad_r50-paa-r101_fpn_2xb8_coco_1x.py b/grounding-dino/mmdetection/configs/lad/lad_r50-paa-r101_fpn_2xb8_coco_1x.py
new file mode 100644
index 0000000000000000000000000000000000000000..f7eaf2bfba1c41b42836e94ffe2714978dffd20a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lad/lad_r50-paa-r101_fpn_2xb8_coco_1x.py
@@ -0,0 +1,126 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+teacher_ckpt = 'http://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.pth' # noqa
+
+model = dict(
+ type='LAD',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ # student
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='LADHead',
+ reg_decoded_bbox=True,
+ score_voting=True,
+ topk=9,
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.3),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=0.5)),
+ # teacher
+ teacher_ckpt=teacher_ckpt,
+ teacher_backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch'),
+ teacher_neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ teacher_bbox_head=dict(
+ type='LADHead',
+ reg_decoded_bbox=True,
+ score_voting=True,
+ topk=9,
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.3),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=0.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.1,
+ neg_iou_thr=0.1,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ score_voting=True,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+train_dataloader = dict(batch_size=8, num_workers=4)
+optim_wrapper = dict(type='AmpOptimWrapper', optimizer=dict(lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/lad/metafile.yml b/grounding-dino/mmdetection/configs/lad/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..230132e63c06c77e16902450c282cf9a25150751
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lad/metafile.yml
@@ -0,0 +1,45 @@
+Collections:
+ - Name: Label Assignment Distillation
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - Label Assignment Distillation
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 2x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2108.10520
+ Title: 'Improving Object Detection by Label Assignment Distillation'
+ README: configs/lad/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.19.0/mmdet/models/detectors/lad.py#L10
+ Version: v2.19.0
+
+Models:
+ - Name: lad_r101-paa-r50_fpn_2xb8_coco_1x
+ In Collection: Label Assignment Distillation
+ Config: configs/lad/lad_r101-paa-r50_fpn_2xb8_coco_1x.py
+ Metadata:
+ Training Memory (GB): 12.4
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r101_paa_r50_fpn_coco_1x/lad_r101_paa_r50_fpn_coco_1x_20220708_124357-9407ac54.pth
+ - Name: lad_r50-paa-r101_fpn_2xb8_coco_1x
+ In Collection: Label Assignment Distillation
+ Config: configs/lad/lad_r50-paa-r101_fpn_2xb8_coco_1x.py
+ Metadata:
+ Training Memory (GB): 8.9
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lad/lad_r50_paa_r101_fpn_coco_1x/lad_r50_paa_r101_fpn_coco_1x_20220708_124246-74c76ff0.pth
diff --git a/grounding-dino/mmdetection/configs/ld/README.md b/grounding-dino/mmdetection/configs/ld/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..65e16c79d9ce4072f46c1473f0f208a533a3a300
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/README.md
@@ -0,0 +1,43 @@
+# LD
+
+> [Localization Distillation for Dense Object Detection](https://arxiv.org/abs/2102.12252)
+
+
+
+## Abstract
+
+Knowledge distillation (KD) has witnessed its powerful capability in learning compact models in object detection. Previous KD methods for object detection mostly focus on imitating deep features within the imitation regions instead of mimicking classification logits due to its inefficiency in distilling localization information. In this paper, by reformulating the knowledge distillation process on localization, we present a novel localization distillation (LD) method which can efficiently transfer the localization knowledge from the teacher to the student. Moreover, we also heuristically introduce the concept of valuable localization region that can aid to selectively distill the semantic and localization knowledge for a certain region. Combining these two new components, for the first time, we show that logit mimicking can outperform feature imitation and localization knowledge distillation is more important and efficient than semantic knowledge for distilling object detectors. Our distillation scheme is simple as well as effective and can be easily applied to different dense object detectors. Experiments show that our LD can boost the AP score of GFocal-ResNet-50 with a single-scale 1× training schedule from 40.1 to 42.1 on the COCO benchmark without any sacrifice on the inference speed.
+
+
+
+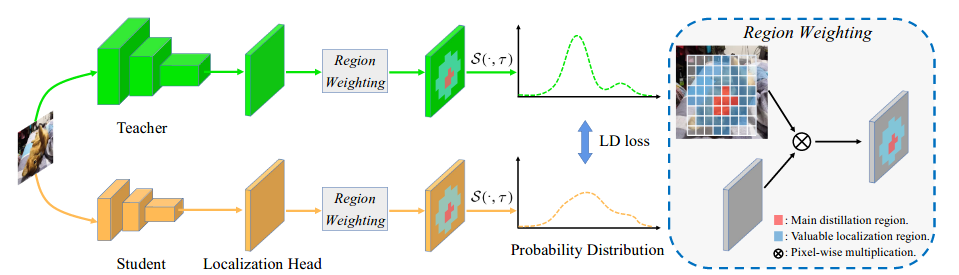 +
+
+
+## Results and Models
+
+### GFocalV1 with LD
+
+| Teacher | Student | Training schedule | Mini-batch size | AP (val) | Config | Download |
+| :-------: | :-----: | :---------------: | :-------------: | :------: | :-----------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| -- | R-18 | 1x | 6 | 35.8 | | |
+| R-101 | R-18 | 1x | 6 | 36.5 | [config](./ld_r18-gflv1-r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r18_gflv1_r101_fpn_coco_1x/ld_r18_gflv1_r101_fpn_coco_1x_20220702_062206-330e6332.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r18_gflv1_r101_fpn_coco_1x/ld_r18_gflv1_r101_fpn_coco_1x_20220702_062206.log.json) |
+| -- | R-34 | 1x | 6 | 38.9 | | |
+| R-101 | R-34 | 1x | 6 | 39.9 | [config](./ld_r34-gflv1-r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r34_gflv1_r101_fpn_coco_1x/ld_r34_gflv1_r101_fpn_coco_1x_20220630_134007-9bc69413.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r34_gflv1_r101_fpn_coco_1x/ld_r34_gflv1_r101_fpn_coco_1x_20220630_134007.log.json) |
+| -- | R-50 | 1x | 6 | 40.1 | | |
+| R-101 | R-50 | 1x | 6 | 41.0 | [config](./ld_r50-gflv1-r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r50_gflv1_r101_fpn_coco_1x/ld_r50_gflv1_r101_fpn_coco_1x_20220629_145355-8dc5bad8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r50_gflv1_r101_fpn_coco_1x/ld_r50_gflv1_r101_fpn_coco_1x_20220629_145355.log.json) |
+| -- | R-101 | 2x | 6 | 44.6 | | |
+| R-101-DCN | R-101 | 2x | 6 | 45.5 | [config](./ld_r101-gflv1-r101-dcn_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r101_gflv1_r101dcn_fpn_coco_2x/ld_r101_gflv1_r101dcn_fpn_coco_2x_20220629_185920-9e658426.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r101_gflv1_r101dcn_fpn_coco_2x/ld_r101_gflv1_r101dcn_fpn_coco_2x_20220629_185920.log.json) |
+
+## Note
+
+- Meaning of Config name: ld_r18(student model)\_gflv1(based on gflv1)\_r101(teacher model)\_fpn(neck)\_coco(dataset)\_1x(12 epoch).py
+
+## Citation
+
+```latex
+@Inproceedings{zheng2022LD,
+ title={Localization Distillation for Dense Object Detection},
+ author= {Zheng, Zhaohui and Ye, Rongguang and Wang, Ping and Ren, Dongwei and Zuo, Wangmeng and Hou, Qibin and Cheng, Mingming},
+ booktitle={CVPR},
+ year={2022}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/ld/ld_r101-gflv1-r101-dcn_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/ld/ld_r101-gflv1-r101-dcn_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a7e928bdc2325825d836bd939f163d71e972c238
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/ld_r101-gflv1-r101-dcn_fpn_2x_coco.py
@@ -0,0 +1,49 @@
+_base_ = ['./ld_r18-gflv1-r101_fpn_1x_coco.py']
+teacher_ckpt = 'https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco/gfl_r101_fpn_dconv_c3-c5_mstrain_2x_coco_20200630_102002-134b07df.pth' # noqa
+model = dict(
+ teacher_config='configs/gfl/gfl_r101-dconv-c3-c5_fpn_ms-2x_coco.py',
+ teacher_ckpt=teacher_ckpt,
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5))
+
+max_epochs = 24
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
+
+# multi-scale training
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/ld/ld_r18-gflv1-r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ld/ld_r18-gflv1-r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f18bb1d3620f3caecdc870ea8a3346424729225c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/ld_r18-gflv1-r101_fpn_1x_coco.py
@@ -0,0 +1,70 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+teacher_ckpt = 'https://download.openmmlab.com/mmdetection/v2.0/gfl/gfl_r101_fpn_mstrain_2x_coco/gfl_r101_fpn_mstrain_2x_coco_20200629_200126-dd12f847.pth' # noqa
+model = dict(
+ type='KnowledgeDistillationSingleStageDetector',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ teacher_config='configs/gfl/gfl_r101_fpn_ms-2x_coco.py',
+ teacher_ckpt=teacher_ckpt,
+ backbone=dict(
+ type='ResNet',
+ depth=18,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 256, 512],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='LDHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ loss_cls=dict(
+ type='QualityFocalLoss',
+ use_sigmoid=True,
+ beta=2.0,
+ loss_weight=1.0),
+ loss_dfl=dict(type='DistributionFocalLoss', loss_weight=0.25),
+ loss_ld=dict(
+ type='KnowledgeDistillationKLDivLoss', loss_weight=0.25, T=10),
+ reg_max=16,
+ loss_bbox=dict(type='GIoULoss', loss_weight=2.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/ld/ld_r34-gflv1-r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ld/ld_r34-gflv1-r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2198adc82cfc98fca139e120ea0487989ac8bae7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/ld_r34-gflv1-r101_fpn_1x_coco.py
@@ -0,0 +1,19 @@
+_base_ = ['./ld_r18-gflv1-r101_fpn_1x_coco.py']
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=34,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet34')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 256, 512],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/ld/ld_r50-gflv1-r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ld/ld_r50-gflv1-r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..89ab5796969b88080f96f3afcc24183b0c11c730
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/ld_r50-gflv1-r101_fpn_1x_coco.py
@@ -0,0 +1,19 @@
+_base_ = ['./ld_r18-gflv1-r101_fpn_1x_coco.py']
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/ld/metafile.yml b/grounding-dino/mmdetection/configs/ld/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..a807d1b816e78734839cc1482c9c3d4afe59d6ac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ld/metafile.yml
@@ -0,0 +1,69 @@
+Collections:
+ - Name: Localization Distillation
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - Localization Distillation
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2102.12252
+ Title: 'Localization Distillation for Dense Object Detection'
+ README: configs/ld/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.11.0/mmdet/models/dense_heads/ld_head.py#L11
+ Version: v2.11.0
+
+Models:
+ - Name: ld_r18-gflv1-r101_fpn_1x_coco
+ In Collection: Localization Distillation
+ Config: configs/ld/ld_r18-gflv1-r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 1.8
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r18_gflv1_r101_fpn_coco_1x/ld_r18_gflv1_r101_fpn_coco_1x_20220702_062206-330e6332.pth
+ - Name: ld_r34-gflv1-r101_fpn_1x_coco
+ In Collection: Localization Distillation
+ Config: configs/ld/ld_r34-gflv1-r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 2.2
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r34_gflv1_r101_fpn_coco_1x/ld_r34_gflv1_r101_fpn_coco_1x_20220630_134007-9bc69413.pth
+ - Name: ld_r50-gflv1-r101_fpn_1x_coco
+ In Collection: Localization Distillation
+ Config: configs/ld/ld_r50-gflv1-r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r50_gflv1_r101_fpn_coco_1x/ld_r50_gflv1_r101_fpn_coco_1x_20220629_145355-8dc5bad8.pth
+ - Name: ld_r101-gflv1-r101-dcn_fpn_2x_coco
+ In Collection: Localization Distillation
+ Config: configs/ld/ld_r101-gflv1-r101-dcn_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ld/ld_r101_gflv1_r101dcn_fpn_coco_2x/ld_r101_gflv1_r101dcn_fpn_coco_2x_20220629_185920-9e658426.pth
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/README.md b/grounding-dino/mmdetection/configs/legacy_1.x/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..443a0a71b46f4d2eda45571d6b7e108af6528d02
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/README.md
@@ -0,0 +1,54 @@
+# Legacy Configs in MMDetection V1.x
+
+
+
+Configs in this directory implement the legacy configs used by MMDetection V1.x and its model zoos.
+
+To help users convert their models from V1.x to MMDetection V2.0, we provide v1.x configs to inference the converted v1.x models.
+Due to the BC-breaking changes in MMDetection V2.0 from MMDetection V1.x, running inference with the same model weights in these two version will produce different results. The difference will cause within 1% AP absolute difference as can be found in the following table.
+
+## Usage
+
+To upgrade the model version, the users need to do the following steps.
+
+### 1. Convert model weights
+
+There are three main difference in the model weights between V1.x and V2.0 codebases.
+
+1. Since the class order in all the detector's classification branch is reordered, all the legacy model weights need to go through the conversion process.
+2. The regression and segmentation head no longer contain the background channel. Weights in these background channels should be removed to fix in the current codebase.
+3. For two-stage detectors, their wegihts need to be upgraded since MMDetection V2.0 refactors all the two-stage detectors with `RoIHead`.
+
+The users can do the same modification as mentioned above for the self-implemented
+detectors. We provide a scripts `tools/model_converters/upgrade_model_version.py` to convert the model weights in the V1.x model zoo.
+
+```bash
+python tools/model_converters/upgrade_model_version.py ${OLD_MODEL_PATH} ${NEW_MODEL_PATH} --num-classes ${NUM_CLASSES}
+
+```
+
+- OLD_MODEL_PATH: the path to load the model weights in 1.x version.
+- NEW_MODEL_PATH: the path to save the converted model weights in 2.0 version.
+- NUM_CLASSES: number of classes of the original model weights. Usually it is 81 for COCO dataset, 21 for VOC dataset.
+ The number of classes in V2.0 models should be equal to that in V1.x models - 1.
+
+### 2. Use configs with legacy settings
+
+After converting the model weights, checkout to the v1.2 release to find the corresponding config file that uses the legacy settings.
+The V1.x models usually need these three legacy modules: `LegacyAnchorGenerator`, `LegacyDeltaXYWHBBoxCoder`, and `RoIAlign(align=False)`.
+For models using ResNet Caffe backbones, they also need to change the pretrain name and the corresponding `img_norm_cfg`.
+An example is in [`retinanet_r50-caffe_fpn_1x_coco_v1.py`](retinanet_r50-caffe_fpn_1x_coco_v1.py)
+Then use the config to test the model weights. For most models, the obtained results should be close to that in V1.x.
+We provide configs of some common structures in this directory.
+
+## Performance
+
+The performance change after converting the models in this directory are listed as the following.
+
+| Method | Style | Lr schd | V1.x box AP | V1.x mask AP | V2.0 box AP | V2.0 mask AP | Config | Download |
+| :-------------------------: | :-----: | :-----: | :---------: | :----------: | :---------: | :----------: | :-------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------: |
+| Mask R-CNN R-50-FPN | pytorch | 1x | 37.3 | 34.2 | 36.8 | 33.9 | [config](./mask-rcnn_r50_fpn_1x_coco_v1.py) | [model](https://s3.ap-northeast-2.amazonaws.com/open-mmlab/mmdetection/models/mask_rcnn_r50_fpn_1x_20181010-069fa190.pth) |
+| RetinaNet R-50-FPN | caffe | 1x | 35.8 | - | 35.4 | - | [config](./retinanet_r50-caffe_fpn_1x_coco_v1.py) | |
+| RetinaNet R-50-FPN | pytorch | 1x | 35.6 | - | 35.2 | - | [config](./retinanet_r50_fpn_1x_coco_v1.py) | [model](https://s3.ap-northeast-2.amazonaws.com/open-mmlab/mmdetection/models/retinanet_r50_fpn_1x_20181125-7b0c2548.pth) |
+| Cascade Mask R-CNN R-50-FPN | pytorch | 1x | 41.2 | 35.7 | 40.8 | 35.6 | [config](./cascade-mask-rcnn_r50_fpn_1x_coco_v1.py) | [model](https://s3.ap-northeast-2.amazonaws.com/open-mmlab/mmdetection/models/cascade_mask_rcnn_r50_fpn_1x_20181123-88b170c9.pth) |
+| SSD300-VGG16 | caffe | 120e | 25.7 | - | 25.4 | - | [config](./ssd300_coco_v1.py) | [model](https://s3.ap-northeast-2.amazonaws.com/open-mmlab/mmdetection/models/ssd300_coco_vgg16_caffe_120e_20181221-84d7110b.pth) |
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/cascade-mask-rcnn_r50_fpn_1x_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/cascade-mask-rcnn_r50_fpn_1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..f948a7a9c10f618438e8ff54bdf3333335577e90
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/cascade-mask-rcnn_r50_fpn_1x_coco_v1.py
@@ -0,0 +1,78 @@
+_base_ = [
+ '../_base_/models/cascade-mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='CascadeRCNN',
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ rpn_head=dict(
+ anchor_generator=dict(type='LegacyAnchorGenerator', center_offset=0.5),
+ bbox_coder=dict(
+ type='LegacyDeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1.0, 1.0, 1.0, 1.0])),
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=7,
+ sampling_ratio=2,
+ aligned=False)),
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ reg_class_agnostic=True,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='LegacyDeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2])),
+ dict(
+ type='Shared2FCBBoxHead',
+ reg_class_agnostic=True,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='LegacyDeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1])),
+ dict(
+ type='Shared2FCBBoxHead',
+ reg_class_agnostic=True,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='LegacyDeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067])),
+ ],
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=14,
+ sampling_ratio=2,
+ aligned=False))))
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/faster-rcnn_r50_fpn_1x_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/faster-rcnn_r50_fpn_1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..66bf9713793c4a0a951273d037253f930fbb31a6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/faster-rcnn_r50_fpn_1x_coco_v1.py
@@ -0,0 +1,38 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ type='FasterRCNN',
+ backbone=dict(
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ rpn_head=dict(
+ type='RPNHead',
+ anchor_generator=dict(
+ type='LegacyAnchorGenerator',
+ center_offset=0.5,
+ scales=[8],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[4, 8, 16, 32, 64]),
+ bbox_coder=dict(type='LegacyDeltaXYWHBBoxCoder'),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ type='StandardRoIHead',
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=7,
+ sampling_ratio=2,
+ aligned=False),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=dict(
+ bbox_coder=dict(type='LegacyDeltaXYWHBBoxCoder'),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn_proposal=dict(max_per_img=2000),
+ rcnn=dict(assigner=dict(match_low_quality=True))))
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/mask-rcnn_r50_fpn_1x_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/mask-rcnn_r50_fpn_1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..690802598493e64821aaf98111161e36b169e475
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/mask-rcnn_r50_fpn_1x_coco_v1.py
@@ -0,0 +1,34 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ rpn_head=dict(
+ anchor_generator=dict(type='LegacyAnchorGenerator', center_offset=0.5),
+ bbox_coder=dict(type='LegacyDeltaXYWHBBoxCoder'),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=7,
+ sampling_ratio=2,
+ aligned=False)),
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=14,
+ sampling_ratio=2,
+ aligned=False)),
+ bbox_head=dict(
+ bbox_coder=dict(type='LegacyDeltaXYWHBBoxCoder'),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+
+ # model training and testing settings
+ train_cfg=dict(
+ rpn_proposal=dict(max_per_img=2000),
+ rcnn=dict(assigner=dict(match_low_quality=True))))
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50-caffe_fpn_1x_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50-caffe_fpn_1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..49abc31a002f56147cacf1b7707140a14b784a99
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50-caffe_fpn_1x_coco_v1.py
@@ -0,0 +1,16 @@
+_base_ = './retinanet_r50_fpn_1x_coco_v1.py'
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ # use caffe img_norm
+ mean=[102.9801, 115.9465, 122.7717],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50_fpn_1x_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50_fpn_1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..6198b9717957374ce734ca74de5f54dda44123b9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/retinanet_r50_fpn_1x_coco_v1.py
@@ -0,0 +1,17 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ bbox_head=dict(
+ type='RetinaHead',
+ anchor_generator=dict(
+ type='LegacyAnchorGenerator',
+ center_offset=0.5,
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(type='LegacyDeltaXYWHBBoxCoder'),
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.11, loss_weight=1.0)))
diff --git a/grounding-dino/mmdetection/configs/legacy_1.x/ssd300_coco_v1.py b/grounding-dino/mmdetection/configs/legacy_1.x/ssd300_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..e5ffc633a9b4773d7116bed7cbf8bcab7fb3110d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/legacy_1.x/ssd300_coco_v1.py
@@ -0,0 +1,20 @@
+_base_ = [
+ '../_base_/models/ssd300.py', '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+# model settings
+input_size = 300
+model = dict(
+ bbox_head=dict(
+ type='SSDHead',
+ anchor_generator=dict(
+ type='LegacySSDAnchorGenerator',
+ scale_major=False,
+ input_size=input_size,
+ basesize_ratio_range=(0.15, 0.9),
+ strides=[8, 16, 32, 64, 100, 300],
+ ratios=[[2], [2, 3], [2, 3], [2, 3], [2], [2]]),
+ bbox_coder=dict(
+ type='LegacyDeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2])))
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/README.md b/grounding-dino/mmdetection/configs/libra_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee8015ba12286a9bf940bf2b690441505e39ec0e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/README.md
@@ -0,0 +1,53 @@
+# Libra R-CNN
+
+> [Libra R-CNN: Towards Balanced Learning for Object Detection](https://arxiv.org/abs/1904.02701)
+
+
+
+## Abstract
+
+Compared with model architectures, the training process, which is also crucial to the success of detectors, has received relatively less attention in object detection. In this work, we carefully revisit the standard training practice of detectors, and find that the detection performance is often limited by the imbalance during the training process, which generally consists in three levels - sample level, feature level, and objective level. To mitigate the adverse effects caused thereby, we propose Libra R-CNN, a simple but effective framework towards balanced learning for object detection. It integrates three novel components: IoU-balanced sampling, balanced feature pyramid, and balanced L1 loss, respectively for reducing the imbalance at sample, feature, and objective level. Benefitted from the overall balanced design, Libra R-CNN significantly improves the detection performance. Without bells and whistles, it achieves 2.5 points and 2.0 points higher Average Precision (AP) than FPN Faster R-CNN and RetinaNet respectively on MSCOCO.
+
+Instance recognition is rapidly advanced along with the developments of various deep convolutional neural networks. Compared to the architectures of networks, the training process, which is also crucial to the success of detectors, has received relatively less attention. In this work, we carefully revisit the standard training practice of detectors, and find that the detection performance is often limited by the imbalance during the training process, which generally consists in three levels - sample level, feature level, and objective level. To mitigate the adverse effects caused thereby, we propose Libra R-CNN, a simple yet effective framework towards balanced learning for instance recognition. It integrates IoU-balanced sampling, balanced feature pyramid, and objective re-weighting, respectively for reducing the imbalance at sample, feature, and objective level. Extensive experiments conducted on MS COCO, LVIS and Pascal VOC datasets prove the effectiveness of the overall balanced design.
+
+
+
+ +
+
+
+## Results and Models
+
+The results on COCO 2017val are shown in the below table. (results on test-dev are usually slightly higher than val)
+
+| Architecture | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----------: | :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50-FPN | pytorch | 1x | 4.6 | 19.0 | 38.3 | [config](./libra-faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r50_fpn_1x_coco/libra_faster_rcnn_r50_fpn_1x_coco_20200130-3afee3a9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r50_fpn_1x_coco/libra_faster_rcnn_r50_fpn_1x_coco_20200130_204655.log.json) |
+| Fast R-CNN | R-50-FPN | pytorch | 1x | | | | | |
+| Faster R-CNN | R-101-FPN | pytorch | 1x | 6.5 | 14.4 | 40.1 | [config](./libra-faster-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r101_fpn_1x_coco/libra_faster_rcnn_r101_fpn_1x_coco_20200203-8dba6a5a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r101_fpn_1x_coco/libra_faster_rcnn_r101_fpn_1x_coco_20200203_001405.log.json) |
+| Faster R-CNN | X-101-64x4d-FPN | pytorch | 1x | 10.8 | 8.5 | 42.7 | [config](./libra-faster-rcnn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_x101_64x4d_fpn_1x_coco/libra_faster_rcnn_x101_64x4d_fpn_1x_coco_20200315-3a7d0488.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_x101_64x4d_fpn_1x_coco/libra_faster_rcnn_x101_64x4d_fpn_1x_coco_20200315_231625.log.json) |
+| RetinaNet | R-50-FPN | pytorch | 1x | 4.2 | 17.7 | 37.6 | [config](./libra-retinanet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_retinanet_r50_fpn_1x_coco/libra_retinanet_r50_fpn_1x_coco_20200205-804d94ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_retinanet_r50_fpn_1x_coco/libra_retinanet_r50_fpn_1x_coco_20200205_112757.log.json) |
+
+## Citation
+
+We provide config files to reproduce the results in the CVPR 2019 paper [Libra R-CNN](https://arxiv.org/pdf/1904.02701.pdf).
+
+The extended version of [Libra R-CNN](https://arxiv.org/pdf/2108.10175.pdf) is accpeted by IJCV.
+
+```latex
+@inproceedings{pang2019libra,
+ title={Libra R-CNN: Towards Balanced Learning for Object Detection},
+ author={Pang, Jiangmiao and Chen, Kai and Shi, Jianping and Feng, Huajun and Ouyang, Wanli and Dahua Lin},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2019}
+}
+
+@article{pang2021towards,
+ title={Towards Balanced Learning for Instance Recognition},
+ author={Pang, Jiangmiao and Chen, Kai and Li, Qi and Xu, Zhihai and Feng, Huajun and Shi, Jianping and Ouyang, Wanli and Lin, Dahua},
+ journal={International Journal of Computer Vision},
+ volume={129},
+ number={5},
+ pages={1376--1393},
+ year={2021},
+ publisher={Springer}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/libra-fast-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/libra_rcnn/libra-fast-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2efe440ce361d5bc5855c76001a5ff6b661a568a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/libra-fast-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,52 @@
+_base_ = '../fast_rcnn/fast-rcnn_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ dict(
+ type='BFP',
+ in_channels=256,
+ num_levels=5,
+ refine_level=2,
+ refine_type='non_local')
+ ],
+ roi_head=dict(
+ bbox_head=dict(
+ loss_bbox=dict(
+ _delete_=True,
+ type='BalancedL1Loss',
+ alpha=0.5,
+ gamma=1.5,
+ beta=1.0,
+ loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rcnn=dict(
+ sampler=dict(
+ _delete_=True,
+ type='CombinedSampler',
+ num=512,
+ pos_fraction=0.25,
+ add_gt_as_proposals=True,
+ pos_sampler=dict(type='InstanceBalancedPosSampler'),
+ neg_sampler=dict(
+ type='IoUBalancedNegSampler',
+ floor_thr=-1,
+ floor_fraction=0,
+ num_bins=3)))))
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# _base_.train_dataloader.dataset.proposal_file = 'libra_proposals/rpn_r50_fpn_1x_train2017.pkl' # noqa
+train_dataloader = dict(
+ dataset=dict(proposal_file='libra_proposals/rpn_r50_fpn_1x_train2017.pkl'))
+
+# _base_.val_dataloader.dataset.proposal_file = 'libra_proposals/rpn_r50_fpn_1x_val2017.pkl' # noqa
+# test_dataloader = _base_.val_dataloader
+val_dataloader = dict(
+ dataset=dict(proposal_file='libra_proposals/rpn_r50_fpn_1x_val2017.pkl'))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..985df64cb437e233f76235ee9be4b788ec8f701c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './libra-faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f9ee507d26338b49eca004ee195fd2b1954c32d9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,41 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5),
+ dict(
+ type='BFP',
+ in_channels=256,
+ num_levels=5,
+ refine_level=2,
+ refine_type='non_local')
+ ],
+ roi_head=dict(
+ bbox_head=dict(
+ loss_bbox=dict(
+ _delete_=True,
+ type='BalancedL1Loss',
+ alpha=0.5,
+ gamma=1.5,
+ beta=1.0,
+ loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rpn=dict(sampler=dict(neg_pos_ub=5), allowed_border=-1),
+ rcnn=dict(
+ sampler=dict(
+ _delete_=True,
+ type='CombinedSampler',
+ num=512,
+ pos_fraction=0.25,
+ add_gt_as_proposals=True,
+ pos_sampler=dict(type='InstanceBalancedPosSampler'),
+ neg_sampler=dict(
+ type='IoUBalancedNegSampler',
+ floor_thr=-1,
+ floor_fraction=0,
+ num_bins=3)))))
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..158e238ed14d9c56b7d02d17f0061b08d4116282
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/libra-faster-rcnn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './libra-faster-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/libra-retinanet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/libra_rcnn/libra-retinanet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..be2742098fb8f1e46bbb16c9d3e2e20c2e3083aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/libra-retinanet_r50_fpn_1x_coco.py
@@ -0,0 +1,26 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ neck=[
+ dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_input',
+ num_outs=5),
+ dict(
+ type='BFP',
+ in_channels=256,
+ num_levels=5,
+ refine_level=1,
+ refine_type='non_local')
+ ],
+ bbox_head=dict(
+ loss_bbox=dict(
+ _delete_=True,
+ type='BalancedL1Loss',
+ alpha=0.5,
+ gamma=1.5,
+ beta=0.11,
+ loss_weight=1.0)))
diff --git a/grounding-dino/mmdetection/configs/libra_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/libra_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f01bd02bb7a55dd899bc64a56346357f2951f6d5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/libra_rcnn/metafile.yml
@@ -0,0 +1,99 @@
+Collections:
+ - Name: Libra R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - IoU-Balanced Sampling
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Balanced Feature Pyramid
+ Paper:
+ URL: https://arxiv.org/abs/1904.02701
+ Title: 'Libra R-CNN: Towards Balanced Learning for Object Detection'
+ README: configs/libra_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/necks/bfp.py#L10
+ Version: v2.0.0
+
+Models:
+ - Name: libra-faster-rcnn_r50_fpn_1x_coco
+ In Collection: Libra R-CNN
+ Config: configs/libra_rcnn/libra-faster-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.6
+ inference time (ms/im):
+ - value: 52.63
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r50_fpn_1x_coco/libra_faster_rcnn_r50_fpn_1x_coco_20200130-3afee3a9.pth
+
+ - Name: libra-faster-rcnn_r101_fpn_1x_coco
+ In Collection: Libra R-CNN
+ Config: configs/libra_rcnn/libra-faster-rcnn_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.5
+ inference time (ms/im):
+ - value: 69.44
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_r101_fpn_1x_coco/libra_faster_rcnn_r101_fpn_1x_coco_20200203-8dba6a5a.pth
+
+ - Name: libra-faster-rcnn_x101-64x4d_fpn_1x_coco
+ In Collection: Libra R-CNN
+ Config: configs/libra_rcnn/libra-faster-rcnn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.8
+ inference time (ms/im):
+ - value: 117.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_faster_rcnn_x101_64x4d_fpn_1x_coco/libra_faster_rcnn_x101_64x4d_fpn_1x_coco_20200315-3a7d0488.pth
+
+ - Name: libra-retinanet_r50_fpn_1x_coco
+ In Collection: Libra R-CNN
+ Config: configs/libra_rcnn/libra-retinanet_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.2
+ inference time (ms/im):
+ - value: 56.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/libra_rcnn/libra_retinanet_r50_fpn_1x_coco/libra_retinanet_r50_fpn_1x_coco_20200205-804d94ce.pth
diff --git a/grounding-dino/mmdetection/configs/lvis/README.md b/grounding-dino/mmdetection/configs/lvis/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..57aeda438b3cb55e7c3c0d22cddc27a41e6fa3ae
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/README.md
@@ -0,0 +1,56 @@
+# LVIS
+
+> [LVIS: A Dataset for Large Vocabulary Instance Segmentation](https://arxiv.org/abs/1908.03195)
+
+
+
+## Abstract
+
+Progress on object detection is enabled by datasets that focus the research community's attention on open challenges. This process led us from simple images to complex scenes and from bounding boxes to segmentation masks. In this work, we introduce LVIS (pronounced \`el-vis'): a new dataset for Large Vocabulary Instance Segmentation. We plan to collect ~2 million high-quality instance segmentation masks for over 1000 entry-level object categories in 164k images. Due to the Zipfian distribution of categories in natural images, LVIS naturally has a long tail of categories with few training samples. Given that state-of-the-art deep learning methods for object detection perform poorly in the low-sample regime, we believe that our dataset poses an important and exciting new scientific challenge.
+
+
+
+ +
+
+
+## Common Setting
+
+- Please follow [install guide](../../docs/get_started.md#install-mmdetection) to install open-mmlab forked cocoapi first.
+
+- Run following scripts to install our forked lvis-api.
+
+ ```shell
+ pip install git+https://github.com/lvis-dataset/lvis-api.git
+ ```
+
+- All experiments use oversample strategy [here](../../docs/tutorials/customize_dataset.md#class-balanced-dataset) with oversample threshold `1e-3`.
+
+- The size of LVIS v0.5 is half of COCO, so schedule `2x` in LVIS is roughly the same iterations as `1x` in COCO.
+
+## Results and models of LVIS v0.5
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :----------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 2x | - | - | 26.1 | 25.9 | [config](./mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis-dbd06831.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis_20200531_160435.log.json) |
+| R-101-FPN | pytorch | 2x | - | - | 27.1 | 27.0 | [config](./mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis-54582ee2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis_20200601_134748.log.json) |
+| X-101-32x4d-FPN | pytorch | 2x | - | - | 26.7 | 26.9 | [config](./mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis-3cf55ea2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis_20200531_221749.log.json) |
+| X-101-64x4d-FPN | pytorch | 2x | - | - | 26.4 | 26.0 | [config](./mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis-1c99a5ad.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis_20200601_194651.log.json) |
+
+## Results and models of LVIS v1
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :--------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 9.1 | - | 22.5 | 21.7 | [config](./mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1-aa78ac3d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1-20200829_061305.log.json) |
+| R-101-FPN | pytorch | 1x | 10.8 | - | 24.6 | 23.6 | [config](./mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1-ec55ce32.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1-20200829_070959.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 11.8 | - | 26.7 | 25.5 | [config](./mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-ebbc5c81.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-20200829_071317.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 14.6 | - | 27.2 | 25.8 | [config](./mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-43d9edfe.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-20200830_060206.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{gupta2019lvis,
+ title={{LVIS}: A Dataset for Large Vocabulary Instance Segmentation},
+ author={Gupta, Agrim and Dollar, Piotr and Girshick, Ross},
+ booktitle={Proceedings of the {IEEE} Conference on Computer Vision and Pattern Recognition},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..3994d75a81aaa5368bd42c591fa770b05b665e25
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5.py
new file mode 100644
index 0000000000000000000000000000000000000000..ed8b3639a0046e14d5c11a98f9d7dc38eb4badec
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..cdd3683e3005dd09ada78827825da516bfd4c66e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py
@@ -0,0 +1,13 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/lvis_v1_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(num_classes=1203), mask_head=dict(num_classes=1203)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py
new file mode 100644
index 0000000000000000000000000000000000000000..b36b6c17fef7da3646654e494fa715302b1b050e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py
@@ -0,0 +1,13 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/lvis_v0.5_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(num_classes=1230), mask_head=dict(num_classes=1230)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..9da3ab6db04ec6ee772202270a47179171a9d13c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
new file mode 100644
index 0000000000000000000000000000000000000000..9a097c94c7e2d7c7b583027ce6000aba8205d490
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..b0819b3ec60d710205a643305edd2a27db977d9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
new file mode 100644
index 0000000000000000000000000000000000000000..9d2720089181f066bcaa04b73903836b64b97bb9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/lvis/metafile.yml b/grounding-dino/mmdetection/configs/lvis/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f8def96c7e5404bba0b40f4f00ce9efabfe0a891
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/lvis/metafile.yml
@@ -0,0 +1,128 @@
+Models:
+ - Name: mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-2x_lvis-v0.5.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v0.5
+ Metrics:
+ box AP: 26.1
+ - Task: Instance Segmentation
+ Dataset: LVIS v0.5
+ Metrics:
+ mask AP: 25.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_2x_lvis-dbd06831.pth
+
+ - Name: mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-2x_lvis-v0.5.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v0.5
+ Metrics:
+ box AP: 27.1
+ - Task: Instance Segmentation
+ Dataset: LVIS v0.5
+ Metrics:
+ mask AP: 27.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_2x_lvis-54582ee2.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v0.5
+ Metrics:
+ box AP: 26.7
+ - Task: Instance Segmentation
+ Dataset: LVIS v0.5
+ Metrics:
+ mask AP: 26.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_2x_lvis-3cf55ea2.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-2x_lvis-v0.5.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v0.5
+ Metrics:
+ box AP: 26.4
+ - Task: Instance Segmentation
+ Dataset: LVIS v0.5
+ Metrics:
+ mask AP: 26.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_2x_lvis-1c99a5ad.pth
+
+ - Name: mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_r50_fpn_sample1e-3_ms-1x_lvis-v1.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 22.5
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 21.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r50_fpn_sample1e-3_mstrain_1x_lvis_v1-aa78ac3d.pth
+
+ - Name: mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_r101_fpn_sample1e-3_ms-1x_lvis-v1.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 24.6
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 23.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_r101_fpn_sample1e-3_mstrain_1x_lvis_v1-ec55ce32.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_x101-32x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 26.7
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 25.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_32x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-ebbc5c81.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1
+ In Collection: Mask R-CNN
+ Config: configs/lvis/mask-rcnn_x101-64x4d_fpn_sample1e-3_ms-1x_lvis-v1.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 27.2
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 25.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/lvis/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1/mask_rcnn_x101_64x4d_fpn_sample1e-3_mstrain_1x_lvis_v1-43d9edfe.pth
diff --git a/grounding-dino/mmdetection/configs/mask2former/README.md b/grounding-dino/mmdetection/configs/mask2former/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..94b0821e7a2f3a467f48f8f7581e6c10d1571404
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/README.md
@@ -0,0 +1,76 @@
+# Mask2Former
+
+> [Masked-attention Mask Transformer for Universal Image Segmentation](http://arxiv.org/abs/2112.01527)
+
+
+
+## Abstract
+
+Image segmentation is about grouping pixels with different semantics, e.g., category or instance membership, where each choice of semantics defines a task. While only the semantics of each task differ, current research focuses on designing specialized architectures for each task. We present Masked-attention Mask Transformer (Mask2Former), a new architecture capable of addressing any image segmentation task (panoptic, instance or semantic). Its key components include masked attention, which extracts localized features by constraining cross-attention within predicted mask regions. In addition to reducing the research effort by at least three times, it outperforms the best specialized architectures by a significant margin on four popular datasets. Most notably, Mask2Former sets a new state-of-the-art for panoptic segmentation (57.8 PQ on COCO), instance segmentation (50.1 AP on COCO) and semantic segmentation (57.7 mIoU on ADE20K).
+
+
+
+ +
+
+
+## Introduction
+
+Mask2Former requires COCO and [COCO-panoptic](http://images.cocodataset.org/annotations/panoptic_annotations_trainval2017.zip) dataset for training and evaluation. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+| | | ├── instances_train2017.json
+| | | ├── instances_val2017.json
+│ │ │ ├── panoptic_train2017.json
+│ │ │ ├── panoptic_train2017
+│ │ │ ├── panoptic_val2017.json
+│ │ │ ├── panoptic_val2017
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+```
+
+## Results and Models
+
+### Panoptic segmentation
+
+| Backbone | style | Pretrain | Lr schd | Mem (GB) | Inf time (fps) | PQ | box mAP | mask mAP | Config | Download |
+| -------- | ------- | ------------ | ------- | -------- | -------------- | ---- | ------- | -------- | ------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
+| R-50 | pytorch | ImageNet-1K | 50e | 13.9 | - | 52.0 | 44.5 | 41.8 | [config](./mask2former_r50_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic/mask2former_r50_8xb2-lsj-50e_coco-panoptic_20230118_125535-54df384a.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic/mask2former_r50_8xb2-lsj-50e_coco-panoptic_20230118_125535.log.json) |
+| R-101 | pytorch | ImageNet-1K | 50e | 16.1 | - | 52.4 | 45.3 | 42.4 | [config](./mask2former_r101_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic/mask2former_r101_8xb2-lsj-50e_coco-panoptic_20220329_225104-c74d4d71.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_r101_lsj_8x2_50e_coco-panoptic/mask2former_r101_lsj_8x2_50e_coco-panoptic_20220329_225104.log.json) |
+| Swin-T | - | ImageNet-1K | 50e | 15.9 | - | 53.4 | 46.3 | 43.4 | [config](./mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic_20220326_224553-3ec9e0ae.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-t-p4-w7-224_lsj_8x2_50e_coco-panoptic/mask2former_swin-t-p4-w7-224_lsj_8x2_50e_coco-panoptic_20220326_224553.log.json) |
+| Swin-S | - | ImageNet-1K | 50e | 19.1 | - | 54.5 | 47.8 | 44.5 | [config](./mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic_20220329_225200-4a16ded7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-s-p4-w7-224_lsj_8x2_50e_coco-panoptic/mask2former_swin-s-p4-w7-224_lsj_8x2_50e_coco-panoptic_20220329_225200.log.json) |
+| Swin-B | - | ImageNet-1K | 50e | 26.0 | - | 55.1 | 48.2 | 44.9 | [config](./mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic_20220331_002244-8a651d82.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-b-p4-w12-384_lsj_8x2_50e_coco-panoptic/mask2former_swin-b-p4-w12-384_lsj_8x2_50e_coco-panoptic_20220331_002244.log.json) |
+| Swin-B | - | ImageNet-21K | 50e | 25.8 | - | 56.3 | 50.0 | 46.3 | [config](./mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic_20220329_230021-05ec7315.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-b-p4-w12-384-in21k_lsj_8x2_50e_coco-panoptic/mask2former_swin-b-p4-w12-384-in21k_lsj_8x2_50e_coco-panoptic_20220329_230021.log.json) |
+| Swin-L | - | ImageNet-21K | 100e | 21.1 | - | 57.6 | 52.2 | 48.5 | [config](./mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic_20220407_104949-82f8d28d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-l-p4-w12-384-in21k_lsj_16x1_100e_coco-panoptic/mask2former_swin-l-p4-w12-384-in21k_lsj_16x1_100e_coco-panoptic_20220407_104949.log.json) |
+
+### Instance segmentation
+
+| Backbone | style | Pretrain | Lr schd | Mem (GB) | Inf time (fps) | box mAP | mask mAP | Config | Download |
+| -------- | ------- | ----------- | ------- | -------- | -------------- | ------- | -------- | ------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
+| R-50 | pytorch | ImageNet-1K | 50e | 13.7 | - | 45.7 | 42.9 | [config](./mask2former_r50_8xb2-lsj-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r50_8xb2-lsj-50e_coco/mask2former_r50_8xb2-lsj-50e_coco_20220506_191028-41b088b6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_r50_lsj_8x2_50e_coco/mask2former_r50_lsj_8x2_50e_coco_20220506_191028.log.json) |
+| R-101 | pytorch | ImageNet-1K | 50e | 15.5 | - | 46.7 | 44.0 | [config](./mask2former_r101_8xb2-lsj-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r101_8xb2-lsj-50e_coco/mask2former_r101_8xb2-lsj-50e_coco_20220426_100250-ecf181e2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_r101_lsj_8x2_50e_coco/mask2former_r101_lsj_8x2_50e_coco_20220426_100250.log.json) |
+| Swin-T | - | ImageNet-1K | 50e | 15.3 | - | 47.7 | 44.7 | [config](./mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco_20220508_091649-01b0f990.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-t-p4-w7-224_lsj_8x2_50e_coco/mask2former_swin-t-p4-w7-224_lsj_8x2_50e_coco_20220508_091649.log.json) |
+| Swin-S | - | ImageNet-1K | 50e | 18.8 | - | 49.3 | 46.1 | [config](./mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco_20220504_001756-c9d0c4f2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask2former/mask2former_swin-s-p4-w7-224_lsj_8x2_50e_coco/mask2former_swin-s-p4-w7-224_lsj_8x2_50e_coco_20220504_001756.log.json) |
+
+### Note
+
+1. The performance is unstable. The `Mask2Former-R50-coco-panoptic` may fluctuate about 0.2 PQ. The models other than `Mask2Former-R50-coco-panoptic` were trained with mmdet 2.x and have been converted for mmdet 3.x.
+2. We have trained the instance segmentation models many times (see more details in [PR 7571](https://github.com/open-mmlab/mmdetection/pull/7571)). The results of the trained models are relatively stable (+- 0.2), and have a certain gap (about 0.2 AP) in comparison with the results in the [paper](http://arxiv.org/abs/2112.01527). However, the performance of the model trained with the official code is unstable and may also be slightly lower than the reported results as mentioned in the [issue](https://github.com/facebookresearch/Mask2Former/issues/46).
+
+## Citation
+
+```latex
+@article{cheng2021mask2former,
+ title={Masked-attention Mask Transformer for Universal Image Segmentation},
+ author={Bowen Cheng and Ishan Misra and Alexander G. Schwing and Alexander Kirillov and Rohit Girdhar},
+ journal={arXiv},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..66685a2fca9c0e165ba0024e242d5eabf5d565c9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,7 @@
+_base_ = './mask2former_r50_8xb2-lsj-50e_coco-panoptic.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f4c29906d9fc6ce47ce928fb73dcb1bb6c6f7ba9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco.py
@@ -0,0 +1,7 @@
+_base_ = ['./mask2former_r50_8xb2-lsj-50e_coco.py']
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..c53e981bf0d5081c3735676be922f64298a8fc80
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,251 @@
+_base_ = [
+ '../_base_/datasets/coco_panoptic.py', '../_base_/default_runtime.py'
+]
+image_size = (1024, 1024)
+batch_augments = [
+ dict(
+ type='BatchFixedSizePad',
+ size=image_size,
+ img_pad_value=0,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=True,
+ seg_pad_value=255)
+]
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=True,
+ seg_pad_value=255,
+ batch_augments=batch_augments)
+
+num_things_classes = 80
+num_stuff_classes = 53
+num_classes = num_things_classes + num_stuff_classes
+model = dict(
+ type='Mask2Former',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=-1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ panoptic_head=dict(
+ type='Mask2FormerHead',
+ in_channels=[256, 512, 1024, 2048], # pass to pixel_decoder inside
+ strides=[4, 8, 16, 32],
+ feat_channels=256,
+ out_channels=256,
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes,
+ num_queries=100,
+ num_transformer_feat_level=3,
+ pixel_decoder=dict(
+ type='MSDeformAttnPixelDecoder',
+ num_outs=3,
+ norm_cfg=dict(type='GN', num_groups=32),
+ act_cfg=dict(type='ReLU'),
+ encoder=dict( # DeformableDetrTransformerEncoder
+ num_layers=6,
+ layer_cfg=dict( # DeformableDetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ num_heads=8,
+ num_levels=3,
+ num_points=4,
+ dropout=0.0,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ num_fcs=2,
+ ffn_drop=0.0,
+ act_cfg=dict(type='ReLU', inplace=True)))),
+ positional_encoding=dict(num_feats=128, normalize=True)),
+ enforce_decoder_input_project=False,
+ positional_encoding=dict(num_feats=128, normalize=True),
+ transformer_decoder=dict( # Mask2FormerTransformerDecoder
+ return_intermediate=True,
+ num_layers=9,
+ layer_cfg=dict( # Mask2FormerTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.0,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.0,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.0,
+ act_cfg=dict(type='ReLU', inplace=True))),
+ init_cfg=None),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=2.0,
+ reduction='mean',
+ class_weight=[1.0] * num_classes + [0.1]),
+ loss_mask=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='mean',
+ loss_weight=5.0),
+ loss_dice=dict(
+ type='DiceLoss',
+ use_sigmoid=True,
+ activate=True,
+ reduction='mean',
+ naive_dice=True,
+ eps=1.0,
+ loss_weight=5.0)),
+ panoptic_fusion_head=dict(
+ type='MaskFormerFusionHead',
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes,
+ loss_panoptic=None,
+ init_cfg=None),
+ train_cfg=dict(
+ num_points=12544,
+ oversample_ratio=3.0,
+ importance_sample_ratio=0.75,
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='ClassificationCost', weight=2.0),
+ dict(
+ type='CrossEntropyLossCost', weight=5.0, use_sigmoid=True),
+ dict(type='DiceCost', weight=5.0, pred_act=True, eps=1.0)
+ ]),
+ sampler=dict(type='MaskPseudoSampler')),
+ test_cfg=dict(
+ panoptic_on=True,
+ # For now, the dataset does not support
+ # evaluating semantic segmentation metric.
+ semantic_on=False,
+ instance_on=True,
+ # max_per_image is for instance segmentation.
+ max_per_image=100,
+ iou_thr=0.8,
+ # In Mask2Former's panoptic postprocessing,
+ # it will filter mask area where score is less than 0.5 .
+ filter_low_score=True),
+ init_cfg=None)
+
+# dataset settings
+data_root = 'data/coco/'
+train_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ to_float32=True,
+ backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadPanopticAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ with_seg=True,
+ backend_args={{_base_.backend_args}}),
+ dict(type='RandomFlip', prob=0.5),
+ # large scale jittering
+ dict(
+ type='RandomResize',
+ scale=image_size,
+ ratio_range=(0.1, 2.0),
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_size=image_size,
+ crop_type='absolute',
+ recompute_bbox=True,
+ allow_negative_crop=True),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+val_evaluator = [
+ dict(
+ type='CocoPanopticMetric',
+ ann_file=data_root + 'annotations/panoptic_val2017.json',
+ seg_prefix=data_root + 'annotations/panoptic_val2017/',
+ backend_args={{_base_.backend_args}}),
+ dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric=['bbox', 'segm'],
+ backend_args={{_base_.backend_args}})
+]
+test_evaluator = val_evaluator
+
+# optimizer
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW',
+ lr=0.0001,
+ weight_decay=0.05,
+ eps=1e-8,
+ betas=(0.9, 0.999)),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi,
+ },
+ norm_decay_mult=0.0),
+ clip_grad=dict(max_norm=0.01, norm_type=2))
+
+# learning policy
+max_iters = 368750
+param_scheduler = dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iters,
+ by_epoch=False,
+ milestones=[327778, 355092],
+ gamma=0.1)
+
+# Before 365001th iteration, we do evaluation every 5000 iterations.
+# After 365000th iteration, we do evaluation every 368750 iterations,
+# which means that we do evaluation at the end of training.
+interval = 5000
+dynamic_intervals = [(max_iters // interval * interval + 1, max_iters)]
+train_cfg = dict(
+ type='IterBasedTrainLoop',
+ max_iters=max_iters,
+ val_interval=interval,
+ dynamic_intervals=dynamic_intervals)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook',
+ by_epoch=False,
+ save_last=True,
+ max_keep_ckpts=3,
+ interval=interval))
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=False)
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..24a17f58c54a2e8694a8bf960d10ebc918acdddc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco.py
@@ -0,0 +1,100 @@
+_base_ = ['./mask2former_r50_8xb2-lsj-50e_coco-panoptic.py']
+
+num_things_classes = 80
+num_stuff_classes = 0
+num_classes = num_things_classes + num_stuff_classes
+image_size = (1024, 1024)
+batch_augments = [
+ dict(
+ type='BatchFixedSizePad',
+ size=image_size,
+ img_pad_value=0,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=False)
+]
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=False,
+ batch_augments=batch_augments)
+model = dict(
+ data_preprocessor=data_preprocessor,
+ panoptic_head=dict(
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes,
+ loss_cls=dict(class_weight=[1.0] * num_classes + [0.1])),
+ panoptic_fusion_head=dict(
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes),
+ test_cfg=dict(panoptic_on=False))
+
+# dataset settings
+train_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ to_float32=True,
+ backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='RandomFlip', prob=0.5),
+ # large scale jittering
+ dict(
+ type='RandomResize',
+ scale=image_size,
+ ratio_range=(0.1, 2.0),
+ resize_type='Resize',
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_size=image_size,
+ crop_type='absolute',
+ recompute_bbox=True,
+ allow_negative_crop=True),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-5, 1e-5), by_mask=True),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(
+ type='LoadImageFromFile',
+ to_float32=True,
+ backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # If you don't have a gt annotation, delete the pipeline
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+train_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ _delete_=True,
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric=['bbox', 'segm'],
+ format_only=False,
+ backend_args={{_base_.backend_args}})
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..b275f23175e8d8294b8bb76e9708dd014ef7030b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,5 @@
+_base_ = ['./mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window12_384_22k.pth' # noqa
+
+model = dict(
+ backbone=dict(init_cfg=dict(type='Pretrained', checkpoint=pretrained)))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..bd59400b4aed1aac97795e474633d5581705b899
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,42 @@
+_base_ = ['./mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window12_384.pth' # noqa
+
+depths = [2, 2, 18, 2]
+model = dict(
+ backbone=dict(
+ pretrain_img_size=384,
+ embed_dims=128,
+ depths=depths,
+ num_heads=[4, 8, 16, 32],
+ window_size=12,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ panoptic_head=dict(in_channels=[128, 256, 512, 1024]))
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..e203ffc96c40098e4cf0788fc47b4438ebffbb41
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic.py
@@ -0,0 +1,25 @@
+_base_ = ['./mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth' # noqa
+
+model = dict(
+ backbone=dict(
+ embed_dims=192,
+ num_heads=[6, 12, 24, 48],
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ panoptic_head=dict(num_queries=200, in_channels=[192, 384, 768, 1536]))
+
+train_dataloader = dict(batch_size=1, num_workers=1)
+
+# learning policy
+max_iters = 737500
+param_scheduler = dict(end=max_iters, milestones=[655556, 710184])
+
+# Before 735001th iteration, we do evaluation every 5000 iterations.
+# After 735000th iteration, we do evaluation every 737500 iterations,
+# which means that we do evaluation at the end of training.'
+interval = 5000
+dynamic_intervals = [(max_iters // interval * interval + 1, max_iters)]
+train_cfg = dict(
+ max_iters=max_iters,
+ val_interval=interval,
+ dynamic_intervals=dynamic_intervals)
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..f9d081db58a74dd02b3b715c3777f077d42de7ca
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,37 @@
+_base_ = ['./mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_small_patch4_window7_224.pth' # noqa
+
+depths = [2, 2, 18, 2]
+model = dict(
+ backbone=dict(
+ depths=depths, init_cfg=dict(type='Pretrained',
+ checkpoint=pretrained)))
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..69d5e8c6f96434973e3e9f3498155e385af815be
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco.py
@@ -0,0 +1,37 @@
+_base_ = ['./mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_small_patch4_window7_224.pth' # noqa
+
+depths = [2, 2, 18, 2]
+model = dict(
+ backbone=dict(
+ depths=depths, init_cfg=dict(type='Pretrained',
+ checkpoint=pretrained)))
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
new file mode 100644
index 0000000000000000000000000000000000000000..1c00d7a697f07ad618a0b4735432a0a74d4992a9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
@@ -0,0 +1,58 @@
+_base_ = ['./mask2former_r50_8xb2-lsj-50e_coco-panoptic.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_tiny_patch4_window7_224.pth' # noqa
+
+depths = [2, 2, 6, 2]
+model = dict(
+ type='Mask2Former',
+ backbone=dict(
+ _delete_=True,
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=depths,
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ with_cp=False,
+ convert_weights=True,
+ frozen_stages=-1,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ panoptic_head=dict(
+ type='Mask2FormerHead', in_channels=[96, 192, 384, 768]),
+ init_cfg=None)
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5bb9c21858ebe065691a8a963bf5dec85542fb57
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py
@@ -0,0 +1,56 @@
+_base_ = ['./mask2former_r50_8xb2-lsj-50e_coco.py']
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_tiny_patch4_window7_224.pth' # noqa
+depths = [2, 2, 6, 2]
+model = dict(
+ type='Mask2Former',
+ backbone=dict(
+ _delete_=True,
+ type='SwinTransformer',
+ embed_dims=96,
+ depths=depths,
+ num_heads=[3, 6, 12, 24],
+ window_size=7,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ with_cp=False,
+ convert_weights=True,
+ frozen_stages=-1,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ panoptic_head=dict(
+ type='Mask2FormerHead', in_channels=[96, 192, 384, 768]),
+ init_cfg=None)
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former/metafile.yml b/grounding-dino/mmdetection/configs/mask2former/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3321239213f7345084b63b77cf02b0525a534585
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former/metafile.yml
@@ -0,0 +1,223 @@
+Collections:
+ - Name: Mask2Former
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Weight Decay
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - Mask2Former
+ Paper:
+ URL: https://arxiv.org/pdf/2112.01527
+ Title: 'Masked-attention Mask Transformer for Universal Image Segmentation'
+ README: configs/mask2former/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.23.0/mmdet/models/detectors/mask2former.py#L7
+ Version: v2.23.0
+
+Models:
+- Name: mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 19.1
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 44.5
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 54.5
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco-panoptic_20220329_225200-4a16ded7.pth
+- Name: mask2former_r101_8xb2-lsj-50e_coco
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco.py
+ Metadata:
+ Training Memory (GB): 15.5
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 44.0
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r101_8xb2-lsj-50e_coco/mask2former_r101_8xb2-lsj-50e_coco_20220426_100250-ecf181e2.pth
+- Name: mask2former_r101_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 16.1
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.4
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 52.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r101_8xb2-lsj-50e_coco-panoptic/mask2former_r101_8xb2-lsj-50e_coco-panoptic_20220329_225104-c74d4d71.pth
+- Name: mask2former_r50_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 13.9
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.8
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 52.0
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r50_8xb2-lsj-50e_coco-panoptic/mask2former_r50_8xb2-lsj-50e_coco-panoptic_20230118_125535-54df384a.pth
+- Name: mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 15.9
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 43.4
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 53.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco-panoptic_20220326_224553-3ec9e0ae.pth
+- Name: mask2former_r50_8xb2-lsj-50e_coco
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_r50_8xb2-lsj-50e_coco.py
+ Metadata:
+ Training Memory (GB): 13.7
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_r50_8xb2-lsj-50e_coco/mask2former_r50_8xb2-lsj-50e_coco_20220506_191028-41b088b6.pth
+- Name: mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 21.1
+ Iterations: 737500
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 52.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 48.5
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 57.6
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic/mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic_20220407_104949-82f8d28d.pth
+- Name: mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 25.8
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 46.3
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 56.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic/mask2former_swin-b-p4-w12-384-in21k_8xb2-lsj-50e_coco-panoptic_20220329_230021-05ec7315.pth
+- Name: mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic.py
+ Metadata:
+ Training Memory (GB): 26.0
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 44.9
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 55.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic/mask2former_swin-b-p4-w12-384_8xb2-lsj-50e_coco-panoptic_20220331_002244-8a651d82.pth
+- Name: mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco.py
+ Metadata:
+ Training Memory (GB): 15.3
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 44.7
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco/mask2former_swin-t-p4-w7-224_8xb2-lsj-50e_coco_20220508_091649-01b0f990.pth
+- Name: mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco
+ In Collection: Mask2Former
+ Config: configs/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco.py
+ Metadata:
+ Training Memory (GB): 18.8
+ Iterations: 368750
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 46.1
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco/mask2former_swin-s-p4-w7-224_8xb2-lsj-50e_coco_20220504_001756-c9d0c4f2.pth
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/README.md b/grounding-dino/mmdetection/configs/mask2former_vis/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..699657290896f1d2ccb36ffe60ec6471f68043fd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/README.md
@@ -0,0 +1,81 @@
+# Mask2Former for Video Instance Segmentation
+
+## Abstract
+
+
+
+We find Mask2Former also achieves state-of-the-art performance on video instance segmentation without modifying the architecture, the loss or even the training pipeline. In this report, we show universal image segmentation architectures trivially generalize to video segmentation by directly predicting 3D segmentation volumes. Specifically, Mask2Former sets a new state-of-the-art of 60.4 AP on YouTubeVIS-2019 and 52.6 AP on YouTubeVIS-2021. We believe Mask2Former is also capable of handling video semantic and panoptic segmentation, given its versatility in image segmentation. We hope this will make state-of-theart video segmentation research more accessible and bring more attention to designing universal image and video segmentation architectures.
+
+
+
+
+  +
+
+
+## Citation
+
+
+
+```latex
+@inproceedings{cheng2021mask2former,
+ title={Masked-attention Mask Transformer for Universal Image Segmentation},
+ author={Bowen Cheng and Ishan Misra and Alexander G. Schwing and Alexander Kirillov and Rohit Girdhar},
+ journal={CVPR},
+ year={2022}
+}
+```
+
+## Results and models of Mask2Former on YouTube-VIS 2021 validation dataset
+
+Note: Codalab has closed the evaluation portal of `YouTube-VIS 2019`, so we do not provide the results of `YouTube-VIS 2019` at present. If you want to evaluate the results of `YouTube-VIS 2021`, at present, you can submit the result to the evaluation portal of `YouTube-VIS 2022`. The value of `AP_S` is the result of `YouTube-VIS 2021`.
+
+| Method | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | AP | Config | Download |
+| :----------------------: | :------: | :-----: | :-----: | :------: | :------------: | :--: | :---------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Mask2Former | R-50 | pytorch | 8e | 6.0 | - | 41.3 | [config](mask2former_r50_8xb2-8e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021/mask2former_r50_8xb2-8e_youtubevis2021_20230426_131833-5d215283.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021/mask2former_r50_8xb2-8e_youtubevis2021_20230426_131833.json) |
+| Mask2Former | R-101 | pytorch | 8e | 7.5 | - | 42.3 | [config](mask2former_r101_8xb2-8e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021/mask2former_r101_8xb2-8e_youtubevis2021_20220823_092747-8077d115.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/mask2former/mask2former_r101_8xb2-8e_youtubevis2021_20220823_092747.json) |
+| Mask2Former(200 queries) | Swin-L | pytorch | 8e | 18.5 | - | 52.3 | [config](mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021_20220907_124752-48252603.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/mask2former/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021_20220907_124752.json) |
+
+## Get started
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Prepare
+
+Tracking Dataset Prepare can refer to this [document](../../docs/en/user_guides/tracking_dataset_prepare.md).
+
+### 3. Training
+
+Due to the influence of parameters such as learning rate in default configuration file, we recommend using 8 GPUs for training in order to reproduce accuracy. You can use the following command to start the training.
+
+```shell
+# Training Mask2Former on YouTube-VIS-2021 dataset with following command.
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_train.sh configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py 8
+```
+
+If you want to know about more detailed usage of `train.py/dist_train.sh/slurm_train.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 4. Testing and evaluation
+
+If you want to get the results of the [YouTube-VOS](https://youtube-vos.org/dataset/vis/) val/test set, please use the following command to generate result files that can be used for submission. It will be stored in `./youtube_vis_results.submission_file.zip`, you can modify the saved path in `test_evaluator` of the config.
+
+```shell
+# The number after config file represents the number of GPUs used.
+bash tools/dist_test_tracking.sh configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py --checkpoint ${CHECKPOINT_PATH}
+```
+
+If you want to know about more detailed usage of `test_tracking.py/dist_test_tracking.sh/slurm_test_tracking.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 5.Inference
+
+Use a single GPU to predict a video and save it as a video.
+
+```shell
+python demo/mot_demo.py demo/demo_mot.mp4 configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py --checkpoint {CHECKPOINT_PATH} --out vis.mp4
+```
+
+If you want to know about more detailed usage of `mot_demo.py`, please refer to this [document](../../docs/en/user_guides/tracking_inference.md).
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2019.py b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2019.py
new file mode 100644
index 0000000000000000000000000000000000000000..3ba4aea8eac72f347940fb12ac964e9bf67c2e0e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2019.py
@@ -0,0 +1,12 @@
+_base_ = './mask2former_r50_8xb2-8e_youtubevis2019.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'mask2former/mask2former_r101_8xb2-lsj-50e_coco/'
+ 'mask2former_r101_8xb2-lsj-50e_coco_20220426_100250-ecf181e2.pth'))
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021.py b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..95f9ceeb38833aeef342e12178703db6901fe5f6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021.py
@@ -0,0 +1,12 @@
+_base_ = './mask2former_r50_8xb2-8e_youtubevis2021.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'mask2former/mask2former_r101_8xb2-lsj-50e_coco/'
+ 'mask2former_r101_8xb2-lsj-50e_coco_20220426_100250-ecf181e2.pth'))
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2019.py b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2019.py
new file mode 100644
index 0000000000000000000000000000000000000000..8dc03bf97a2ed2b90e097bbd9637a42bf4d64c35
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2019.py
@@ -0,0 +1,174 @@
+_base_ = ['../_base_/datasets/youtube_vis.py', '../_base_/default_runtime.py']
+
+num_classes = 40
+num_frames = 2
+model = dict(
+ type='Mask2FormerVideo',
+ data_preprocessor=dict(
+ type='TrackDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=-1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ track_head=dict(
+ type='Mask2FormerTrackHead',
+ in_channels=[256, 512, 1024, 2048], # pass to pixel_decoder inside
+ strides=[4, 8, 16, 32],
+ feat_channels=256,
+ out_channels=256,
+ num_classes=num_classes,
+ num_queries=100,
+ num_frames=num_frames,
+ num_transformer_feat_level=3,
+ pixel_decoder=dict(
+ type='MSDeformAttnPixelDecoder',
+ num_outs=3,
+ norm_cfg=dict(type='GN', num_groups=32),
+ act_cfg=dict(type='ReLU'),
+ encoder=dict( # DeformableDetrTransformerEncoder
+ num_layers=6,
+ layer_cfg=dict( # DeformableDetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiScaleDeformableAttention
+ embed_dims=256,
+ num_heads=8,
+ num_levels=3,
+ num_points=4,
+ im2col_step=128,
+ dropout=0.0,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=1024,
+ num_fcs=2,
+ ffn_drop=0.0,
+ act_cfg=dict(type='ReLU', inplace=True)))),
+ positional_encoding=dict(num_feats=128, normalize=True)),
+ enforce_decoder_input_project=False,
+ positional_encoding=dict(
+ type='SinePositionalEncoding3D', num_feats=128, normalize=True),
+ transformer_decoder=dict( # Mask2FormerTransformerDecoder
+ return_intermediate=True,
+ num_layers=9,
+ layer_cfg=dict( # Mask2FormerTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.0,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.0,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.0,
+ act_cfg=dict(type='ReLU', inplace=True))),
+ init_cfg=None),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=2.0,
+ reduction='mean',
+ class_weight=[1.0] * num_classes + [0.1]),
+ loss_mask=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='mean',
+ loss_weight=5.0),
+ loss_dice=dict(
+ type='DiceLoss',
+ use_sigmoid=True,
+ activate=True,
+ reduction='mean',
+ naive_dice=True,
+ eps=1.0,
+ loss_weight=5.0),
+ train_cfg=dict(
+ num_points=12544,
+ oversample_ratio=3.0,
+ importance_sample_ratio=0.75,
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='ClassificationCost', weight=2.0),
+ dict(
+ type='CrossEntropyLossCost',
+ weight=5.0,
+ use_sigmoid=True),
+ dict(type='DiceCost', weight=5.0, pred_act=True, eps=1.0)
+ ]),
+ sampler=dict(type='MaskPseudoSampler'))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='https://download.openmmlab.com/mmdetection/v3.0/'
+ 'mask2former/mask2former_r50_8xb2-lsj-50e_coco/'
+ 'mask2former_r50_8xb2-lsj-50e_coco_20220506_191028-41b088b6.pth'))
+
+# optimizer
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW',
+ lr=0.0001,
+ weight_decay=0.05,
+ eps=1e-8,
+ betas=(0.9, 0.999)),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi,
+ },
+ norm_decay_mult=0.0),
+ clip_grad=dict(max_norm=0.01, norm_type=2))
+
+# learning policy
+max_iters = 6000
+param_scheduler = dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iters,
+ by_epoch=False,
+ milestones=[
+ 4000,
+ ],
+ gamma=0.1)
+# runtime settings
+train_cfg = dict(
+ type='IterBasedTrainLoop', max_iters=max_iters, val_interval=6001)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='TrackLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook', by_epoch=False, save_last=True, interval=2000),
+ visualization=dict(type='TrackVisualizationHook', draw=False))
+log_processor = dict(type='LogProcessor', window_size=50, by_epoch=False)
+
+# evaluator
+val_evaluator = dict(
+ type='YouTubeVISMetric',
+ metric='youtube_vis_ap',
+ outfile_prefix='./youtube_vis_results',
+ format_only=True)
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..158fe52d20fccf162cb66202fbc9069ba0f4cb68
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py
@@ -0,0 +1,37 @@
+_base_ = './mask2former_r50_8xb2-8e_youtubevis2019.py'
+
+dataset_type = 'YouTubeVISDataset'
+data_root = 'data/youtube_vis_2021/'
+dataset_version = data_root[-5:-1] # 2019 or 2021
+
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_train.json'))
+
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_valid.json'))
+test_dataloader = val_dataloader
+
+# learning policy
+max_iters = 8000
+param_scheduler = dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iters,
+ by_epoch=False,
+ milestones=[
+ 5500,
+ ],
+ gamma=0.1)
+# runtime settings
+train_cfg = dict(
+ type='IterBasedTrainLoop', max_iters=max_iters, val_interval=8001)
+
+default_hooks = dict(
+ checkpoint=dict(
+ type='CheckpointHook', by_epoch=False, save_last=True, interval=500))
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..94dcccf408dfb989ea264536a617a48ecc13171c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py
@@ -0,0 +1,64 @@
+_base_ = ['./mask2former_r50_8xb2-8e_youtubevis2021.py']
+depths = [2, 2, 18, 2]
+model = dict(
+ type='Mask2FormerVideo',
+ backbone=dict(
+ _delete_=True,
+ type='SwinTransformer',
+ pretrain_img_size=384,
+ embed_dims=192,
+ depths=depths,
+ num_heads=[6, 12, 24, 48],
+ window_size=12,
+ mlp_ratio=4,
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ with_cp=False,
+ convert_weights=True,
+ frozen_stages=-1,
+ init_cfg=None),
+ track_head=dict(
+ type='Mask2FormerTrackHead',
+ in_channels=[192, 384, 768, 1536],
+ num_queries=200),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v3.0/mask2former/'
+ 'mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic/'
+ 'mask2former_swin-l-p4-w12-384-in21k_16xb1-lsj-100e_coco-panoptic_'
+ '20220407_104949-82f8d28d.pth'))
+
+# set all layers in backbone to lr_mult=0.1
+# set all norm layers, position_embeding,
+# query_embeding, level_embeding to decay_multi=0.0
+backbone_norm_multi = dict(lr_mult=0.1, decay_mult=0.0)
+backbone_embed_multi = dict(lr_mult=0.1, decay_mult=0.0)
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'backbone.patch_embed.norm': backbone_norm_multi,
+ 'backbone.norm': backbone_norm_multi,
+ 'absolute_pos_embed': backbone_embed_multi,
+ 'relative_position_bias_table': backbone_embed_multi,
+ 'query_embed': embed_multi,
+ 'query_feat': embed_multi,
+ 'level_embed': embed_multi
+}
+custom_keys.update({
+ f'backbone.stages.{stage_id}.blocks.{block_id}.norm': backbone_norm_multi
+ for stage_id, num_blocks in enumerate(depths)
+ for block_id in range(num_blocks)
+})
+custom_keys.update({
+ f'backbone.stages.{stage_id}.downsample.norm': backbone_norm_multi
+ for stage_id in range(len(depths) - 1)
+})
+# optimizer
+optim_wrapper = dict(
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
diff --git a/grounding-dino/mmdetection/configs/mask2former_vis/metafile.yml b/grounding-dino/mmdetection/configs/mask2former_vis/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f5f4bd7c5775820f283a7544bf5978fe0aa1abc5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask2former_vis/metafile.yml
@@ -0,0 +1,53 @@
+Collections:
+ - Name: Mask2Former
+ Metadata:
+ Training Techniques:
+ - AdamW
+ - Weight Decay
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - Mask2Former
+ Paper:
+ URL: https://arxiv.org/pdf/2112.10764.pdf
+ Title: Mask2Former for Video Instance Segmentation
+ README: configs/mask2former/README.md
+
+Models:
+ - Name: mask2former_r50_8xb2-8e_youtubevis2021
+ In Collection: Mask2Former
+ Config: configs/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 6.0
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 41.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_r50_8xb2-8e_youtubevis2021/mask2former_r50_8xb2-8e_youtubevis2021_20230426_131833-5d215283.pth
+
+ - Name: mask2former_r101_8xb2-8e_youtubevis2021
+ In Collection: Mask2Former
+ Config: configs/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 7.5
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 42.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_r101_8xb2-8e_youtubevis2021/mask2former_r101_8xb2-8e_youtubevis2021_20220823_092747-8077d115.pth
+
+ - Name: mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py
+ In Collection: Mask2Former
+ Config: configs/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 18.5
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 52.3
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/mask2former_vis/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021/mask2former_swin-l-p4-w12-384-in21k_8xb2-8e_youtubevis2021_20220907_124752-48252603.pth
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/README.md b/grounding-dino/mmdetection/configs/mask_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..afc5c3c92c683947ca01ad05456b0d7ff77be5e9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/README.md
@@ -0,0 +1,59 @@
+# Mask R-CNN
+
+> [Mask R-CNN](https://arxiv.org/abs/1703.06870)
+
+
+
+## Abstract
+
+We present a conceptually simple, flexible, and general framework for object instance segmentation. Our approach efficiently detects objects in an image while simultaneously generating a high-quality segmentation mask for each instance. The method, called Mask R-CNN, extends Faster R-CNN by adding a branch for predicting an object mask in parallel with the existing branch for bounding box recognition. Mask R-CNN is simple to train and adds only a small overhead to Faster R-CNN, running at 5 fps. Moreover, Mask R-CNN is easy to generalize to other tasks, e.g., allowing us to estimate human poses in the same framework. We show top results in all three tracks of the COCO suite of challenges, including instance segmentation, bounding-box object detection, and person keypoint detection. Without bells and whistles, Mask R-CNN outperforms all existing, single-model entries on every task, including the COCO 2016 challenge winners. We hope our simple and effective approach will serve as a solid baseline and help ease future research in instance-level recognition.
+
+
+
+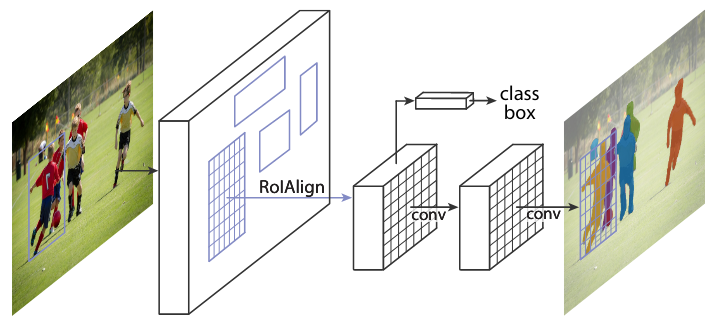 +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :---------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | caffe | 1x | 4.3 | | 38.0 | 34.4 | [config](./mask-rcnn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_1x_coco/mask_rcnn_r50_caffe_fpn_1x_coco_bbox_mAP-0.38__segm_mAP-0.344_20200504_231812-0ebd1859.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_1x_coco/mask_rcnn_r50_caffe_fpn_1x_coco_20200504_231812.log.json) |
+| R-50-FPN | pytorch | 1x | 4.4 | 16.1 | 38.2 | 34.7 | [config](./mask-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205_050542.log.json) |
+| R-50-FPN (FP16) | pytorch | 1x | 3.6 | 24.1 | 38.1 | 34.7 | [config](./mask-rcnn_r50_fpn_amp-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fp16/mask_rcnn_r50_fpn_fp16_1x_coco/mask_rcnn_r50_fpn_fp16_1x_coco_20200205-59faf7e4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fp16/mask_rcnn_r50_fpn_fp16_1x_coco/mask_rcnn_r50_fpn_fp16_1x_coco_20200205_130539.log.json) |
+| R-50-FPN | pytorch | 2x | - | - | 39.2 | 35.4 | [config](./mask-rcnn_r50_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_2x_coco/mask_rcnn_r50_fpn_2x_coco_bbox_mAP-0.392__segm_mAP-0.354_20200505_003907-3e542a40.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_2x_coco/mask_rcnn_r50_fpn_2x_coco_20200505_003907.log.json) |
+| R-101-FPN | caffe | 1x | | | 40.4 | 36.4 | [config](./mask-rcnn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_caffe_fpn_1x_coco/mask_rcnn_r101_caffe_fpn_1x_coco_20200601_095758-805e06c1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_caffe_fpn_1x_coco/mask_rcnn_r101_caffe_fpn_1x_coco_20200601_095758.log.json) |
+| R-101-FPN | pytorch | 1x | 6.4 | 13.5 | 40.0 | 36.1 | [config](./mask-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204-1efe0ed5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204_144809.log.json) |
+| R-101-FPN | pytorch | 2x | - | - | 40.8 | 36.6 | [config](./mask-rcnn_r101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_2x_coco/mask_rcnn_r101_fpn_2x_coco_bbox_mAP-0.408__segm_mAP-0.366_20200505_071027-14b391c7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_2x_coco/mask_rcnn_r101_fpn_2x_coco_20200505_071027.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 7.6 | 11.3 | 41.9 | 37.5 | [config](./mask-rcnn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_1x_coco/mask_rcnn_x101_32x4d_fpn_1x_coco_20200205-478d0b67.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_1x_coco/mask_rcnn_x101_32x4d_fpn_1x_coco_20200205_034906.log.json) |
+| X-101-32x4d-FPN | pytorch | 2x | - | - | 42.2 | 37.8 | [config](./mask-rcnn_x101-32x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_2x_coco/mask_rcnn_x101_32x4d_fpn_2x_coco_bbox_mAP-0.422__segm_mAP-0.378_20200506_004702-faef898c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_2x_coco/mask_rcnn_x101_32x4d_fpn_2x_coco_20200506_004702.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 10.7 | 8.0 | 42.8 | 38.4 | [config](./mask-rcnn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_1x_coco/mask_rcnn_x101_64x4d_fpn_1x_coco_20200201-9352eb0d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_1x_coco/mask_rcnn_x101_64x4d_fpn_1x_coco_20200201_124310.log.json) |
+| X-101-64x4d-FPN | pytorch | 2x | - | - | 42.7 | 38.1 | [config](./mask-rcnn_x101-64x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_2x_coco/mask_rcnn_x101_64x4d_fpn_2x_coco_20200509_224208-39d6f70c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_2x_coco/mask_rcnn_x101_64x4d_fpn_2x_coco_20200509_224208.log.json) |
+| X-101-32x8d-FPN | pytorch | 1x | 10.6 | - | 42.8 | 38.3 | [config](./mask-rcnn_x101-32x8d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_1x_coco/mask_rcnn_x101_32x8d_fpn_1x_coco_20220630_173841-0aaf329e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_1x_coco/mask_rcnn_x101_32x8d_fpn_1x_coco_20220630_173841.log.json) |
+
+## Pre-trained Models
+
+We also train some models with longer schedules and multi-scale training. The users could finetune them for downstream tasks.
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :--------------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-FPN](./mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py) | caffe | 2x | 4.3 | | 40.3 | 36.5 | [config](./mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco_bbox_mAP-0.403__segm_mAP-0.365_20200504_231822-a75c98ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco_20200504_231822.log.json) |
+| [R-50-FPN](./mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py) | caffe | 3x | 4.3 | | 40.8 | 37.0 | [config](./mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_20200504_163245.log.json) |
+| [R-50-FPN](./mask-rcnn_r50_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 4.1 | | 40.9 | 37.1 | [config](./mask-rcnn_r50_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_fpn_mstrain-poly_3x_coco_20210524_201154-21b550bb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_fpn_mstrain-poly_3x_coco_20210524_201154.log.json) |
+| [R-101-FPN](./mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py) | caffe | 3x | 5.9 | | 42.9 | 38.5 | [config](./mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco_20210526_132339-3c33ce02.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco_20210526_132339.log.json) |
+| [R-101-FPN](./mask-rcnn_r101_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 6.1 | | 42.7 | 38.5 | [config](./mask-rcnn_r101_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_fpn_mstrain-poly_3x_coco_20210524_200244-5675c317.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_fpn_mstrain-poly_3x_coco_20210524_200244.log.json) |
+| [x101-32x4d-FPN](./mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 7.3 | | 43.6 | 39.0 | [config](./mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco_20210524_201410-abcd7859.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco_20210524_201410.log.json) |
+| [X-101-32x8d-FPN](./mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py) | pytorch | 1x | 10.4 | | 43.4 | 39.0 | [config](./mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco_20220630_170346-b4637974.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco_20220630_170346.log.json) |
+| [X-101-32x8d-FPN](./mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 10.3 | | 44.3 | 39.5 | [config](./mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco_20210607_161042-8bd2c639.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco_20210607_161042.log.json) |
+| [X-101-64x4d-FPN](./mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py) | pytorch | 3x | 10.4 | | 44.5 | 39.7 | [config](./mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco_20210526_120447-c376f129.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco_20210526_120447.log.json) |
+
+## Citation
+
+```latex
+@article{He_2017,
+ title={Mask R-CNN},
+ journal={2017 IEEE International Conference on Computer Vision (ICCV)},
+ publisher={IEEE},
+ author={He, Kaiming and Gkioxari, Georgia and Dollar, Piotr and Girshick, Ross},
+ year={2017},
+ month={Oct}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..09808e4bcada43b1e935d5393894c7ba3401fc3d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './mask-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e723aea81ff82dfa842d7468e166f42ee9291669
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,19 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ # use caffe img_norm
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ depth=101,
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..af91ff0b8349b0e9e658b69cf4c5dd138b7b8a5a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a5599e7c4942b523d6500e2c7c8ad4638cab45c6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..452351050238a4d4411b2bf6fc916e2d69804766
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './mask-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..384f6dcd3ca33cd91755b48dd525d747a358ee02
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r101_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,10 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5b9219c9c1da8ca68cf7ada0881419b371a26a87
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r18_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './mask-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe-c4_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe-c4_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9919f11c3fc7b68528bf6f690e39185d703aff43
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe-c4_1x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50-caffe-c4.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4124f138d874def6810cea6c884a02eaacdf5f71
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ # use caffe img_norm
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7702ae14a9cc54686df6a3eadec5bc8cfeb8e0a8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-1x_coco.py
@@ -0,0 +1,28 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ # use caffe img_norm
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs'),
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..94d94dd3613e0599f51f113ccf12e568a5b29f8f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py
@@ -0,0 +1,31 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ # use caffe img_norm
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ poly2mask=False),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dbf87bb8346dd351c8f16700df7b9640bcfa984a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py'
+
+train_cfg = dict(max_epochs=24)
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..45260e2e39b53c0107e257ef2d05a14f5d5c0323
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py'
+
+train_cfg = dict(max_epochs=36)
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_poly-1x_coco_v1.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_poly-1x_coco_v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..3baf00140ecfa57ea54b68b85ac826e14490daa4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_poly-1x_coco_v1.py
@@ -0,0 +1,31 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ # use caffe img_norm
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ rpn_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ bbox_roi_extractor=dict(
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=7,
+ sampling_ratio=2,
+ aligned=False)),
+ bbox_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
+ mask_roi_extractor=dict(
+ roi_layer=dict(
+ type='RoIAlign',
+ output_size=14,
+ sampling_ratio=2,
+ aligned=False))))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x-wandb_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x-wandb_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..28b125ccb94869aff2bb283e6533fd693c79a76e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x-wandb_coco.py
@@ -0,0 +1,16 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+vis_backends = [dict(type='LocalVisBackend'), dict(type='WandbVisBackend')]
+visualizer = dict(vis_backends=vis_backends)
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# default_hooks = dict(checkpoint=dict(interval=4))
+_base_.default_hooks.checkpoint.interval = 4
+
+# train_cfg = dict(val_interval=2)
+_base_.train_cfg.val_interval = 2
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0fc6b91aa895e044b3fc62a3cdedbc12a052e91b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..87cb8b4bb7d2fbfcfe667e7bd6cfc08e01e28c1a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_2x_coco.py
@@ -0,0 +1,5 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7371b3646fdda7bdc1fcfcd44cf8a20df27c40b5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,22 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../common/lsj-100e_coco-instance.py'
+]
+image_size = (1024, 1024)
+batch_augments = [
+ dict(type='BatchFixedSizePad', size=image_size, pad_mask=True)
+]
+
+model = dict(data_preprocessor=dict(batch_augments=batch_augments))
+
+train_dataloader = dict(batch_size=8, num_workers=4)
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.02 * 4, momentum=0.9, weight_decay=0.00004))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_amp-1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_amp-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a139c48b2091a3a40943ce7ec8301b06cea01d4f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_amp-1x_coco.py
@@ -0,0 +1,4 @@
+_base_ = './mask-rcnn_r50_fpn_1x_coco.py'
+
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(type='AmpOptimWrapper')
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..417adc3cebb3acbcc987b3f0453a78204dde1ea9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,4 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_poly-1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_poly-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..826180ce0a831a1ee6206bd52ffa516df766136c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_r50_fpn_poly-1x_coco.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ poly2mask=False),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs'),
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..921ade81e30afb60a3a6f03d2f2aecef85767da8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r101_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..db8157f80fac23f6216afbeefed6cb80398f7e0d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_r101_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..83e5451f38cb01d3d30712f22633fed6234d06c9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3e9b1b6fe8fcb152d9ad22bc403da6e62e936f77
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_1x_coco.py
@@ -0,0 +1,22 @@
+_base_ = './mask-rcnn_r101_fpn_1x_coco.py'
+
+model = dict(
+ # ResNeXt-101-32x8d model trained with Caffe2 at FB,
+ # so the mean and std need to be changed.
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[57.375, 57.120, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=8,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnext101_32x8d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6ee204d90001edd3e8e08e4a59ba25dd1ec4195c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco.py
@@ -0,0 +1,40 @@
+_base_ = './mask-rcnn_r101_fpn_1x_coco.py'
+
+model = dict(
+ # ResNeXt-101-32x8d model trained with Caffe2 at FB,
+ # so the mean and std need to be changed.
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[57.375, 57.120, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=8,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnext101_32x8d')))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ poly2mask=False),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs'),
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..999a30c39fc083f26fe0cd9e2ec13bb4f6063268
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,25 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ # ResNeXt-101-32x8d model trained with Caffe2 at FB,
+ # so the mean and std need to be changed.
+ data_preprocessor=dict(
+ mean=[103.530, 116.280, 123.675],
+ std=[57.375, 57.120, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=8,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnext101_32x8d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2cbb658c1b053d6674694c1a09101e965d5724ba
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f21a55b00db77a3cf2386a738a3b8fb39bf2fa44
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './mask-rcnn_x101-32x4d_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..09b49d47740b70c4a192d94a95b994d0a303f2d1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/mask_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/mask_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..ddf85c872bc8681a849c59c917a4b5ca0151d21a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mask_rcnn/metafile.yml
@@ -0,0 +1,443 @@
+Collections:
+ - Name: Mask R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Softmax
+ - RPN
+ - Convolution
+ - Dense Connections
+ - FPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/1703.06870v3
+ Title: "Mask R-CNN"
+ README: configs/mask_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/mask_rcnn.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: mask-rcnn_r50-caffe_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.3
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_1x_coco/mask_rcnn_r50_caffe_fpn_1x_coco_bbox_mAP-0.38__segm_mAP-0.344_20200504_231812-0ebd1859.pth
+
+ - Name: mask-rcnn_r50_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.4
+ inference time (ms/im):
+ - value: 62.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth
+
+ - Name: mask-rcnn_r50_fpn_fp16_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50_fpn_amp-1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.6
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ - Mixed Precision Training
+ inference time (ms/im):
+ - value: 41.49
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP16
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fp16/mask_rcnn_r50_fpn_fp16_1x_coco/mask_rcnn_r50_fpn_fp16_1x_coco_20200205-59faf7e4.pth
+
+ - Name: mask-rcnn_r50_fpn_2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 4.4
+ inference time (ms/im):
+ - value: 62.11
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 35.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_2x_coco/mask_rcnn_r50_fpn_2x_coco_bbox_mAP-0.392__segm_mAP-0.354_20200505_003907-3e542a40.pth
+
+ - Name: mask-rcnn_r101-caffe_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_caffe_fpn_1x_coco/mask_rcnn_r101_caffe_fpn_1x_coco_20200601_095758-805e06c1.pth
+
+ - Name: mask-rcnn_r101_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ inference time (ms/im):
+ - value: 74.07
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204-1efe0ed5.pth
+
+ - Name: mask-rcnn_r101_fpn_2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ inference time (ms/im):
+ - value: 74.07
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_2x_coco/mask_rcnn_r101_fpn_2x_coco_bbox_mAP-0.408__segm_mAP-0.366_20200505_071027-14b391c7.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ inference time (ms/im):
+ - value: 88.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_1x_coco/mask_rcnn_x101_32x4d_fpn_1x_coco_20200205-478d0b67.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ inference time (ms/im):
+ - value: 88.5
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_2x_coco/mask_rcnn_x101_32x4d_fpn_2x_coco_bbox_mAP-0.422__segm_mAP-0.378_20200506_004702-faef898c.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.7
+ inference time (ms/im):
+ - value: 125
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_1x_coco/mask_rcnn_x101_64x4d_fpn_1x_coco_20200201-9352eb0d.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.7
+ inference time (ms/im):
+ - value: 125
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_2x_coco/mask_rcnn_x101_64x4d_fpn_2x_coco_20200509_224208-39d6f70c.pth
+
+ - Name: mask-rcnn_x101-32x8d_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_1x_coco/mask_rcnn_x101_32x8d_fpn_1x_coco_20220630_173841-0aaf329e.pth
+
+ - Name: mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-2x_coco.py
+ Metadata:
+ Training Memory (GB): 4.3
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_2x_coco_bbox_mAP-0.403__segm_mAP-0.365_20200504_231822-a75c98ce.pth
+
+ - Name: mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.3
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth
+
+ - Name: mask-rcnn_r50_fpn_mstrain-poly_3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r50_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.1
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_fpn_mstrain-poly_3x_coco_20210524_201154-21b550bb.pth
+
+ - Name: mask-rcnn_r101_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r101_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 6.1
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_fpn_mstrain-poly_3x_coco_20210524_200244-5675c317.pth
+
+ - Name: mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_r101-caffe_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.9
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r101_caffe_fpn_mstrain-poly_3x_coco_20210526_132339-3c33ce02.pth
+
+ - Name: mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x4d_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.3
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x4d_fpn_mstrain-poly_3x_coco_20210524_201410-abcd7859.pth
+
+ - Name: mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.4
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_1x_coco_20220630_170346-b4637974.pth
+
+ - Name: mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-32x8d_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 10.3
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_32x8d_fpn_mstrain-poly_3x_coco_20210607_161042-8bd2c639.pth
+
+ - Name: mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/mask_rcnn/mask-rcnn_x101-64x4d_fpn_ms-poly_3x_coco.py
+ Metadata:
+ Epochs: 36
+ Training Memory (GB): 10.4
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco/mask_rcnn_x101_64x4d_fpn_mstrain-poly_3x_coco_20210526_120447-c376f129.pth
diff --git a/grounding-dino/mmdetection/configs/maskformer/README.md b/grounding-dino/mmdetection/configs/maskformer/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ca5ce320e1eb42f9cc12b4192fecb038fff71113
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/maskformer/README.md
@@ -0,0 +1,58 @@
+# MaskFormer
+
+> [Per-Pixel Classification is Not All You Need for Semantic Segmentation](https://arxiv.org/abs/2107.06278)
+
+
+
+## Abstract
+
+Modern approaches typically formulate semantic segmentation as a per-pixel classification task, while instance-level segmentation is handled with an alternative mask classification. Our key insight: mask classification is sufficiently general to solve both semantic- and instance-level segmentation tasks in a unified manner using the exact same model, loss, and training procedure. Following this observation, we propose MaskFormer, a simple mask classification model which predicts a set of binary masks, each associated with a single global class label prediction. Overall, the proposed mask classification-based method simplifies the landscape of effective approaches to semantic and panoptic segmentation tasks and shows excellent empirical results. In particular, we observe that MaskFormer outperforms per-pixel classification baselines when the number of classes is large. Our mask classification-based method outperforms both current state-of-the-art semantic (55.6 mIoU on ADE20K) and panoptic segmentation (52.7 PQ on COCO) models.
+
+
+
+ +
+
+
+## Introduction
+
+MaskFormer requires COCO and [COCO-panoptic](http://images.cocodataset.org/annotations/panoptic_annotations_trainval2017.zip) dataset for training and evaluation. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+│ │ │ ├── panoptic_train2017.json
+│ │ │ ├── panoptic_train2017
+│ │ │ ├── panoptic_val2017.json
+│ │ │ ├── panoptic_val2017
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+```
+
+## Results and Models
+
+| Backbone | style | Lr schd | Mem (GB) | Inf time (fps) | PQ | SQ | RQ | PQ_th | SQ_th | RQ_th | PQ_st | SQ_st | RQ_st | Config | Download |
+| :------: | :-----: | :-----: | :------: | :------------: | :----: | :----: | :----: | :----: | :----: | :----: | :----: | :----: | :----: | :--------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | 75e | 16.2 | - | 46.757 | 80.297 | 57.176 | 50.829 | 81.125 | 61.798 | 40.610 | 79.048 | 50.199 | [config](./maskformer_r50_ms-16xb1-75e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/maskformer/maskformer_r50_ms-16xb1-75e_coco/maskformer_r50_ms-16xb1-75e_coco_20230116_095226-baacd858.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/maskformer/maskformer_r50_ms-16xb1-75e_coco/maskformer_r50_ms-16xb1-75e_coco_20230116_095226.log.json) |
+| Swin-L | pytorch | 300e | 27.2 | - | 53.249 | 81.704 | 64.231 | 58.798 | 82.923 | 70.282 | 44.874 | 79.863 | 55.097 | [config](./maskformer_swin-l-p4-w12_64xb1-ms-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco_20220326_221612-c63ab967.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/maskformer/maskformer_swin-l-p4-w12_mstrain_64x1_300e_coco/maskformer_swin-l-p4-w12_mstrain_64x1_300e_coco_20220326_221612.log.json) |
+
+### Note
+
+1. The `R-50` version was mentioned in Table XI, in paper [Masked-attention Mask Transformer for Universal Image Segmentation](https://arxiv.org/abs/2112.01527).
+2. The models were trained with mmdet 2.x and have been converted for mmdet 3.x.
+
+## Citation
+
+```latex
+@inproceedings{cheng2021maskformer,
+ title={Per-Pixel Classification is Not All You Need for Semantic Segmentation},
+ author={Bowen Cheng and Alexander G. Schwing and Alexander Kirillov},
+ journal={NeurIPS},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/maskformer/maskformer_r50_ms-16xb1-75e_coco.py b/grounding-dino/mmdetection/configs/maskformer/maskformer_r50_ms-16xb1-75e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..784ee7767bf1318e967444461028b49a38dc3dbc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/maskformer/maskformer_r50_ms-16xb1-75e_coco.py
@@ -0,0 +1,216 @@
+_base_ = [
+ '../_base_/datasets/coco_panoptic.py', '../_base_/default_runtime.py'
+]
+
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=1,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=True,
+ seg_pad_value=255)
+
+num_things_classes = 80
+num_stuff_classes = 53
+num_classes = num_things_classes + num_stuff_classes
+model = dict(
+ type='MaskFormer',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=-1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ panoptic_head=dict(
+ type='MaskFormerHead',
+ in_channels=[256, 512, 1024, 2048], # pass to pixel_decoder inside
+ feat_channels=256,
+ out_channels=256,
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes,
+ num_queries=100,
+ pixel_decoder=dict(
+ type='TransformerEncoderPixelDecoder',
+ norm_cfg=dict(type='GN', num_groups=32),
+ act_cfg=dict(type='ReLU'),
+ encoder=dict( # DetrTransformerEncoder
+ num_layers=6,
+ layer_cfg=dict( # DetrTransformerEncoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.1,
+ act_cfg=dict(type='ReLU', inplace=True)))),
+ positional_encoding=dict(num_feats=128, normalize=True)),
+ enforce_decoder_input_project=False,
+ positional_encoding=dict(num_feats=128, normalize=True),
+ transformer_decoder=dict( # DetrTransformerDecoder
+ num_layers=6,
+ layer_cfg=dict( # DetrTransformerDecoderLayer
+ self_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ cross_attn_cfg=dict( # MultiheadAttention
+ embed_dims=256,
+ num_heads=8,
+ dropout=0.1,
+ batch_first=True),
+ ffn_cfg=dict(
+ embed_dims=256,
+ feedforward_channels=2048,
+ num_fcs=2,
+ ffn_drop=0.1,
+ act_cfg=dict(type='ReLU', inplace=True))),
+ return_intermediate=True),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0,
+ reduction='mean',
+ class_weight=[1.0] * num_classes + [0.1]),
+ loss_mask=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ reduction='mean',
+ loss_weight=20.0),
+ loss_dice=dict(
+ type='DiceLoss',
+ use_sigmoid=True,
+ activate=True,
+ reduction='mean',
+ naive_dice=True,
+ eps=1.0,
+ loss_weight=1.0)),
+ panoptic_fusion_head=dict(
+ type='MaskFormerFusionHead',
+ num_things_classes=num_things_classes,
+ num_stuff_classes=num_stuff_classes,
+ loss_panoptic=None,
+ init_cfg=None),
+ train_cfg=dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='ClassificationCost', weight=1.0),
+ dict(type='FocalLossCost', weight=20.0, binary_input=True),
+ dict(type='DiceCost', weight=1.0, pred_act=True, eps=1.0)
+ ]),
+ sampler=dict(type='MaskPseudoSampler')),
+ test_cfg=dict(
+ panoptic_on=True,
+ # For now, the dataset does not support
+ # evaluating semantic segmentation metric.
+ semantic_on=False,
+ instance_on=False,
+ # max_per_image is for instance segmentation.
+ max_per_image=100,
+ object_mask_thr=0.8,
+ iou_thr=0.8,
+ # In MaskFormer's panoptic postprocessing,
+ # it will not filter masks whose score is smaller than 0.5 .
+ filter_low_score=False),
+ init_cfg=None)
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='LoadPanopticAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ with_seg=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[[
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(400, 1333), (500, 1333), (600, 1333)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333),
+ (576, 1333), (608, 1333), (640, 1333),
+ (672, 1333), (704, 1333), (736, 1333),
+ (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]]),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(
+ batch_size=1, num_workers=1, dataset=dict(pipeline=train_pipeline))
+
+val_dataloader = dict(batch_size=1, num_workers=1)
+
+test_dataloader = val_dataloader
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='AdamW',
+ lr=0.0001,
+ weight_decay=0.0001,
+ eps=1e-8,
+ betas=(0.9, 0.999)),
+ paramwise_cfg=dict(
+ custom_keys={
+ 'backbone': dict(lr_mult=0.1, decay_mult=1.0),
+ 'query_embed': dict(lr_mult=1.0, decay_mult=0.0)
+ },
+ norm_decay_mult=0.0),
+ clip_grad=dict(max_norm=0.01, norm_type=2))
+
+max_epochs = 75
+
+# learning rate
+param_scheduler = dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[50],
+ gamma=0.1)
+
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (16 GPUs) x (1 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco.py b/grounding-dino/mmdetection/configs/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9e4897f26d47c049f8791169867c2df307b87f61
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco.py
@@ -0,0 +1,73 @@
+_base_ = './maskformer_r50_ms-16xb1-75e_coco.py'
+
+pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth' # noqa
+depths = [2, 2, 18, 2]
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='SwinTransformer',
+ pretrain_img_size=384,
+ embed_dims=192,
+ patch_size=4,
+ window_size=12,
+ mlp_ratio=4,
+ depths=depths,
+ num_heads=[6, 12, 24, 48],
+ qkv_bias=True,
+ qk_scale=None,
+ drop_rate=0.,
+ attn_drop_rate=0.,
+ drop_path_rate=0.3,
+ patch_norm=True,
+ out_indices=(0, 1, 2, 3),
+ with_cp=False,
+ convert_weights=True,
+ init_cfg=dict(type='Pretrained', checkpoint=pretrained)),
+ panoptic_head=dict(
+ in_channels=[192, 384, 768, 1536], # pass to pixel_decoder inside
+ pixel_decoder=dict(
+ _delete_=True,
+ type='PixelDecoder',
+ norm_cfg=dict(type='GN', num_groups=32),
+ act_cfg=dict(type='ReLU')),
+ enforce_decoder_input_project=True))
+
+# optimizer
+
+# weight_decay = 0.01
+# norm_weight_decay = 0.0
+# embed_weight_decay = 0.0
+embed_multi = dict(lr_mult=1.0, decay_mult=0.0)
+norm_multi = dict(lr_mult=1.0, decay_mult=0.0)
+custom_keys = {
+ 'norm': norm_multi,
+ 'absolute_pos_embed': embed_multi,
+ 'relative_position_bias_table': embed_multi,
+ 'query_embed': embed_multi
+}
+
+optim_wrapper = dict(
+ optimizer=dict(lr=6e-5, weight_decay=0.01),
+ paramwise_cfg=dict(custom_keys=custom_keys, norm_decay_mult=0.0))
+
+max_epochs = 300
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=1e-6, by_epoch=False, begin=0, end=1500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[250],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (64 GPUs) x (1 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/maskformer/metafile.yml b/grounding-dino/mmdetection/configs/maskformer/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..fa58269d51c3e936f6acfaa664766afb84e7e0b6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/maskformer/metafile.yml
@@ -0,0 +1,43 @@
+Collections:
+ - Name: MaskFormer
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Weight Decay
+ Training Resources: 16x V100 GPUs
+ Architecture:
+ - MaskFormer
+ Paper:
+ URL: https://arxiv.org/pdf/2107.06278
+ Title: 'Per-Pixel Classification is Not All You Need for Semantic Segmentation'
+ README: configs/maskformer/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/mmdet/models/detectors/maskformer.py#L7
+ Version: v2.22.0
+
+Models:
+ - Name: maskformer_r50_ms-16xb1-75e_coco
+ In Collection: MaskFormer
+ Config: configs/maskformer/maskformer_r50_ms-16xb1-75e_coco.py
+ Metadata:
+ Training Memory (GB): 16.2
+ Epochs: 75
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 46.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/maskformer/maskformer_r50_ms-16xb1-75e_coco/maskformer_r50_ms-16xb1-75e_coco_20230116_095226-baacd858.pth
+ - Name: maskformer_swin-l-p4-w12_64xb1-ms-300e_coco
+ In Collection: MaskFormer
+ Config: configs/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco.py
+ Metadata:
+ Training Memory (GB): 27.2
+ Epochs: 300
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 53.2
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/maskformer/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco/maskformer_swin-l-p4-w12_64xb1-ms-300e_coco_20220326_221612-c63ab967.pth
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/README.md b/grounding-dino/mmdetection/configs/masktrack_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..5cef692a382635e88732b2dc38985cfbc3c773e7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/README.md
@@ -0,0 +1,93 @@
+# Video Instance Segmentation
+
+## Abstract
+
+
+
+In this paper we present a new computer vision task, named video instance segmentation. The goal of this new task is simultaneous detection, segmentation and tracking of instances in videos. In words, it is the first time that the image instance segmentation problem is extended to the video domain. To facilitate research on this new task, we propose a large-scale benchmark called YouTube-VIS, which consists of 2883 high-resolution YouTube videos, a 40-category label set and 131k high-quality instance masks. In addition, we propose a novel algorithm called MaskTrack R-CNN for this task. Our new method introduces a new tracking branch to Mask R-CNN to jointly perform the detection, segmentation and tracking tasks simultaneously. Finally, we evaluate the proposed method and several strong baselines on our new dataset. Experimental results clearly demonstrate the advantages of the proposed algorithm and reveal insight for future improvement. We believe the video instance segmentation task will motivate the community along the line of research for video understanding.
+
+
+
+
+  +
+
+
+## Citation
+
+
+
+```latex
+@inproceedings{yang2019video,
+ title={Video instance segmentation},
+ author={Yang, Linjie and Fan, Yuchen and Xu, Ning},
+ booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
+ pages={5188--5197},
+ year={2019}
+}
+```
+
+## Results and models of MaskTrack R-CNN on YouTube-VIS 2019 validation dataset
+
+As mentioned in [Issues #6](https://github.com/youtubevos/MaskTrackRCNN/issues/6#issuecomment-502503505) in MaskTrack R-CNN, the result is kind of unstable for different trials, which ranges from 28 AP to 31 AP when using R-50-FPN as backbone.
+The checkpoint provided below is the best one from two experiments.
+
+| Method | Base detector | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | AP | Config | Download |
+| :-------------: | :-----------: | :-------: | :-----: | :-----: | :------: | :------------: | :--: | :--------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| MaskTrack R-CNN | Mask R-CNN | R-50-FPN | pytorch | 12e | 1.61 | - | 30.2 | [config](masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2019/masktrack_rcnn_r50_fpn_12e_youtubevis2019_20211022_194830-6ca6b91e.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2019/masktrack_rcnn_r50_fpn_12e_youtubevis2019_20211022_194830.log.json) |
+| MaskTrack R-CNN | Mask R-CNN | R-101-FPN | pytorch | 12e | 2.27 | - | 32.2 | [config](masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2019/masktrack_rcnn_r101_fpn_12e_youtubevis2019_20211023_150038-454dc48b.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2019/masktrack_rcnn_r101_fpn_12e_youtubevis2019_20211023_150038.log.json) |
+| MaskTrack R-CNN | Mask R-CNN | X-101-FPN | pytorch | 12e | 3.69 | - | 34.7 | [config](masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2019/masktrack_rcnn_x101_fpn_12e_youtubevis2019_20211023_153205-fff7a102.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2019/masktrack_rcnn_x101_fpn_12e_youtubevis2019_20211023_153205.log.json) |
+
+## Results and models of MaskTrack R-CNN on YouTube-VIS 2021 validation dataset
+
+The checkpoint provided below is the best one from two experiments.
+
+| Method | Base detector | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | AP | Config | Download |
+| :-------------: | :-----------: | :-------: | :-----: | :-----: | :------: | :------------: | :--: | :--------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| MaskTrack R-CNN | Mask R-CNN | R-50-FPN | pytorch | 12e | 1.61 | - | 28.7 | [config](masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2021/masktrack_rcnn_r50_fpn_12e_youtubevis2021_20211026_044948-10da90d9.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2021/masktrack_rcnn_r50_fpn_12e_youtubevis2021_20211026_044948.log.json) |
+| MaskTrack R-CNN | Mask R-CNN | R-101-FPN | pytorch | 12e | 2.27 | - | 31.3 | [config](masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2021/masktrack_rcnn_r101_fpn_12e_youtubevis2021_20211026_045509-3c49e4f3.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2021/masktrack_rcnn_r101_fpn_12e_youtubevis2021_20211026_045509.log.json) |
+| MaskTrack R-CNN | Mask R-CNN | X-101-FPN | pytorch | 12e | 3.69 | - | 33.5 | [config](masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021.py) | [model](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2021/masktrack_rcnn_x101_fpn_12e_youtubevis2021_20211026_095943-90831df4.pth) \| [log](https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2021/masktrack_rcnn_x101_fpn_12e_youtubevis2021_20211026_095943.log.json) |
+
+## Get started
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Prepare
+
+Tracking Dataset Prepare can refer to this [document](../../docs/en/user_guides/tracking_dataset_prepare.md).
+
+### 3. Training
+
+Due to the influence of parameters such as learning rate in default configuration file, we recommend using 8 GPUs for training in order to reproduce accuracy. You can use the following command to start the training.
+
+```shell
+# Training MaskTrack R-CNN on YouTube-VIS-2021 dataset with following command.
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_train.sh configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py 8
+```
+
+If you want to know about more detailed usage of `train.py/dist_train.sh/slurm_train.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 4. Testing and evaluation
+
+If you want to get the results of the [YouTube-VOS](https://youtube-vos.org/dataset/vis/) val/test set, please use the following command to generate result files that can be used for submission. It will be stored in `./youtube_vis_results.submission_file.zip`, you can modify the saved path in `test_evaluator` of the config.
+
+```shell
+# The number after config file represents the number of GPUs used.
+bash tools/dist_test_tracking.sh configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py 8 --checkpoint ${CHECKPOINT_PATH}
+```
+
+If you want to know about more detailed usage of `train.py/dist_train.sh/slurm_train.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 5.Inference
+
+Use a single GPU to predict a video and save it as a video.
+
+```shell
+python demo/mot_demo.py demo/demo_mot.mp4 configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py --checkpoint {CHECKPOINT_PATH} --out vis.mp4
+```
+
+If you want to know about more detailed usage of `mot_demo.py`, please refer to this [document](../../docs/en/user_guides/tracking_inference.md).
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019.py
new file mode 100644
index 0000000000000000000000000000000000000000..4be492d5419b8598120faa29eed44eada0fb5ba2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019.py
@@ -0,0 +1,12 @@
+_base_ = ['./masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py']
+model = dict(
+ detector=dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='torchvision://resnet101')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204-1efe0ed5.pth' # noqa: E501
+ )))
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..81bae4af8d8945a024cd498a001e52059741f8a9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021.py
@@ -0,0 +1,28 @@
+_base_ = ['./masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py']
+model = dict(
+ detector=dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='torchvision://resnet101')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204-1efe0ed5.pth' # noqa: E501
+ )))
+
+data_root = 'data/youtube_vis_2021/'
+dataset_version = data_root[-5:-1]
+
+# dataloader
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_train.json'))
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_valid.json'))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py
new file mode 100644
index 0000000000000000000000000000000000000000..db1be7b0ddf00a07ce6e06e4e179059e68c103a3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py
@@ -0,0 +1,130 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/youtube_vis.py', '../_base_/default_runtime.py'
+]
+
+detector = _base_.model
+detector.pop('data_preprocessor')
+detector.roi_head.bbox_head.update(dict(num_classes=40))
+detector.roi_head.mask_head.update(dict(num_classes=40))
+detector.train_cfg.rpn.sampler.update(dict(num=64))
+detector.train_cfg.rpn_proposal.update(dict(nms_pre=200, max_per_img=200))
+detector.train_cfg.rcnn.sampler.update(dict(num=128))
+detector.test_cfg.rpn.update(dict(nms_pre=200, max_per_img=200))
+detector.test_cfg.rcnn.update(dict(score_thr=0.01))
+detector['init_cfg'] = dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth' # noqa: E501
+)
+del _base_.model
+
+model = dict(
+ type='MaskTrackRCNN',
+ data_preprocessor=dict(
+ type='TrackDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ detector=detector,
+ track_head=dict(
+ type='RoITrackHead',
+ roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ embed_head=dict(
+ type='RoIEmbedHead',
+ num_fcs=2,
+ roi_feat_size=7,
+ in_channels=256,
+ fc_out_channels=1024),
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=True,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='RandomSampler',
+ num=128,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True),
+ pos_weight=-1,
+ debug=False)),
+ tracker=dict(
+ type='MaskTrackRCNNTracker',
+ match_weights=dict(det_score=1.0, iou=2.0, det_label=10.0),
+ num_frames_retain=20))
+
+dataset_type = 'YouTubeVISDataset'
+data_root = 'data/youtube_vis_2019/'
+dataset_version = data_root[-5:-1] # 2019 or 2021
+
+# train_dataloader
+train_dataloader = dict(
+ _delete_=True,
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ sampler=dict(type='TrackImgSampler'), # image-based sampling
+ batch_sampler=dict(type='TrackAspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2019_train.json',
+ data_prefix=dict(img_path='train/JPEGImages'),
+ pipeline=_base_.train_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.00125, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3.0,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# visualizer
+default_hooks = dict(
+ visualization=dict(type='TrackVisualizationHook', draw=False))
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='TrackLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# runtime settings
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=12, val_begin=13)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# evaluator
+val_evaluator = dict(
+ type='YouTubeVISMetric',
+ metric='youtube_vis_ap',
+ outfile_prefix='./youtube_vis_results',
+ format_only=True)
+test_evaluator = val_evaluator
+
+del detector
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..47263d5091c3b5b76056373558ce9a0a97bb071b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py
@@ -0,0 +1,17 @@
+_base_ = ['./masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py']
+
+data_root = 'data/youtube_vis_2021/'
+dataset_version = data_root[-5:-1]
+
+# dataloader
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_train.json'))
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_valid.json'))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019.py
new file mode 100644
index 0000000000000000000000000000000000000000..e7e3f11e13a3a20ba8e4311963db558a9e4fd247
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019.py
@@ -0,0 +1,16 @@
+_base_ = ['./masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py']
+model = dict(
+ detector=dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://resnext101_64x4d')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_1x_coco/mask_rcnn_x101_64x4d_fpn_1x_coco_20200201-9352eb0d.pth' # noqa: E501
+ )))
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021.py b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea4c8b92483292cc7de1b2f321d4d514427f3cb5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021.py
@@ -0,0 +1,32 @@
+_base_ = ['./masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py']
+model = dict(
+ detector=dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://resnext101_64x4d')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_64x4d_fpn_1x_coco/mask_rcnn_x101_64x4d_fpn_1x_coco_20200201-9352eb0d.pth' # noqa: E501
+ )))
+
+data_root = 'data/youtube_vis_2021/'
+dataset_version = data_root[-5:-1]
+
+# dataloader
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_train.json'))
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root,
+ dataset_version=dataset_version,
+ ann_file='annotations/youtube_vis_2021_valid.json'))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/masktrack_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/masktrack_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7a1d71d582dc31f3c05f721c6ea8a225d0e0ce33
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/masktrack_rcnn/metafile.yml
@@ -0,0 +1,91 @@
+Collections:
+ - Name: MaskTrack R-CNN
+ Metadata:
+ Training Techniques:
+ - SGD with Momentum
+ Training Resources: 8x TiTanXP GPUs
+ Architecture:
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/pdf/1905.04804.pdf
+ Title: Video Instance Segmentation
+ README: configs/masktrack_rcnn/README.md
+
+Models:
+ - Name: masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2019.py
+ Metadata:
+ Training Data: YouTube-VIS 2019
+ Training Memory (GB): 1.16
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2019
+ Metrics:
+ AP: 30.2
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2019/masktrack_rcnn_r50_fpn_12e_youtubevis2019_20211022_194830-6ca6b91e.pth
+
+ - Name: masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2019.py
+ Metadata:
+ Training Data: YouTube-VIS 2019
+ Training Memory (GB): 2.27
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2019
+ Metrics:
+ AP: 32.2
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2019/masktrack_rcnn_r101_fpn_12e_youtubevis2019_20211023_150038-454dc48b.pth
+
+ - Name: masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2019.py
+ Metadata:
+ Training Data: YouTube-VIS 2019
+ Training Memory (GB): 3.69
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2019
+ Metrics:
+ AP: 34.7
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2019/masktrack_rcnn_x101_fpn_12e_youtubevis2019_20211023_153205-fff7a102.pth
+
+ - Name: masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r50_fpn_8xb1-12e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 1.16
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 28.7
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r50_fpn_12e_youtubevis2021/masktrack_rcnn_r50_fpn_12e_youtubevis2021_20211026_044948-10da90d9.pth
+
+ - Name: masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_r101_fpn_8xb1-12e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 2.27
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 31.3
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_r101_fpn_12e_youtubevis2021/masktrack_rcnn_r101_fpn_12e_youtubevis2021_20211026_045509-3c49e4f3.pth
+
+ - Name: masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021
+ In Collection: MaskTrack R-CNN
+ Config: configs/masktrack_rcnn/masktrack-rcnn_mask-rcnn_x101_fpn_8xb1-12e_youtubevis2021.py
+ Metadata:
+ Training Data: YouTube-VIS 2021
+ Training Memory (GB): 3.69
+ Results:
+ - Task: Video Instance Segmentation
+ Dataset: YouTube-VIS 2021
+ Metrics:
+ AP: 33.5
+ Weights: https://download.openmmlab.com/mmtracking/vis/masktrack_rcnn/masktrack_rcnn_x101_fpn_12e_youtubevis2021/masktrack_rcnn_x101_fpn_12e_youtubevis2021_20211026_095943-90831df4.pth
diff --git a/grounding-dino/mmdetection/configs/misc/d2_faster-rcnn_r50-caffe_fpn_ms-90k_coco.py b/grounding-dino/mmdetection/configs/misc/d2_faster-rcnn_r50-caffe_fpn_ms-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d93e1562606b3d6bd657454c99220d329c526f30
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/misc/d2_faster-rcnn_r50-caffe_fpn_ms-90k_coco.py
@@ -0,0 +1,75 @@
+_base_ = '../common/ms-90k_coco.py'
+
+# model settings
+model = dict(
+ type='Detectron2Wrapper',
+ bgr_to_rgb=False,
+ detector=dict(
+ # The settings in `d2_detector` will merged into default settings
+ # in detectron2. More details please refer to
+ # https://github.com/facebookresearch/detectron2/blob/main/detectron2/config/defaults.py # noqa
+ meta_architecture='GeneralizedRCNN',
+ # If you want to finetune the detector, you can use the
+ # checkpoint released by detectron2, for example:
+ # weights='detectron2://COCO-Detection/faster_rcnn_R_50_FPN_1x/137257794/model_final_b275ba.pkl' # noqa
+ weights='detectron2://ImageNetPretrained/MSRA/R-50.pkl',
+ mask_on=False,
+ pixel_mean=[103.530, 116.280, 123.675],
+ pixel_std=[1.0, 1.0, 1.0],
+ backbone=dict(name='build_resnet_fpn_backbone', freeze_at=2),
+ resnets=dict(
+ depth=50,
+ out_features=['res2', 'res3', 'res4', 'res5'],
+ num_groups=1,
+ norm='FrozenBN'),
+ fpn=dict(
+ in_features=['res2', 'res3', 'res4', 'res5'], out_channels=256),
+ anchor_generator=dict(
+ name='DefaultAnchorGenerator',
+ sizes=[[32], [64], [128], [256], [512]],
+ aspect_ratios=[[0.5, 1.0, 2.0]],
+ angles=[[-90, 0, 90]]),
+ proposal_generator=dict(name='RPN'),
+ rpn=dict(
+ head_name='StandardRPNHead',
+ in_features=['p2', 'p3', 'p4', 'p5', 'p6'],
+ iou_thresholds=[0.3, 0.7],
+ iou_labels=[0, -1, 1],
+ batch_size_per_image=256,
+ positive_fraction=0.5,
+ bbox_reg_loss_type='smooth_l1',
+ bbox_reg_loss_weight=1.0,
+ bbox_reg_weights=(1.0, 1.0, 1.0, 1.0),
+ smooth_l1_beta=0.0,
+ loss_weight=1.0,
+ boundary_thresh=-1,
+ pre_nms_topk_train=2000,
+ post_nms_topk_train=1000,
+ pre_nms_topk_test=1000,
+ post_nms_topk_test=1000,
+ nms_thresh=0.7,
+ conv_dims=[-1]),
+ roi_heads=dict(
+ name='StandardROIHeads',
+ num_classes=80,
+ in_features=['p2', 'p3', 'p4', 'p5'],
+ iou_thresholds=[0.5],
+ iou_labels=[0, 1],
+ batch_size_per_image=512,
+ positive_fraction=0.25,
+ score_thresh_test=0.05,
+ nms_thresh_test=0.5,
+ proposal_append_gt=True),
+ roi_box_head=dict(
+ name='FastRCNNConvFCHead',
+ num_fc=2,
+ fc_dim=1024,
+ conv_dim=256,
+ pooler_type='ROIAlignV2',
+ pooler_resolution=7,
+ pooler_sampling_ratio=0,
+ bbox_reg_loss_type='smooth_l1',
+ bbox_reg_loss_weight=1.0,
+ bbox_reg_weights=(10.0, 10.0, 5.0, 5.0),
+ smooth_l1_beta=0.0,
+ cls_agnostic_bbox_reg=False)))
diff --git a/grounding-dino/mmdetection/configs/misc/d2_mask-rcnn_r50-caffe_fpn_ms-90k_coco.py b/grounding-dino/mmdetection/configs/misc/d2_mask-rcnn_r50-caffe_fpn_ms-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c0919c4593f028445dc033e85314320f88409a54
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/misc/d2_mask-rcnn_r50-caffe_fpn_ms-90k_coco.py
@@ -0,0 +1,83 @@
+_base_ = '../common/ms-poly-90k_coco-instance.py'
+
+# model settings
+model = dict(
+ type='Detectron2Wrapper',
+ bgr_to_rgb=False,
+ detector=dict(
+ # The settings in `d2_detector` will merged into default settings
+ # in detectron2. More details please refer to
+ # https://github.com/facebookresearch/detectron2/blob/main/detectron2/config/defaults.py # noqa
+ meta_architecture='GeneralizedRCNN',
+ # If you want to finetune the detector, you can use the
+ # checkpoint released by detectron2, for example:
+ # weights='detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_1x/137260431/model_final_a54504.pkl' # noqa
+ weights='detectron2://ImageNetPretrained/MSRA/R-50.pkl',
+ mask_on=True,
+ pixel_mean=[103.530, 116.280, 123.675],
+ pixel_std=[1.0, 1.0, 1.0],
+ backbone=dict(name='build_resnet_fpn_backbone', freeze_at=2),
+ resnets=dict(
+ depth=50,
+ out_features=['res2', 'res3', 'res4', 'res5'],
+ num_groups=1,
+ norm='FrozenBN'),
+ fpn=dict(
+ in_features=['res2', 'res3', 'res4', 'res5'], out_channels=256),
+ anchor_generator=dict(
+ name='DefaultAnchorGenerator',
+ sizes=[[32], [64], [128], [256], [512]],
+ aspect_ratios=[[0.5, 1.0, 2.0]],
+ angles=[[-90, 0, 90]]),
+ proposal_generator=dict(name='RPN'),
+ rpn=dict(
+ head_name='StandardRPNHead',
+ in_features=['p2', 'p3', 'p4', 'p5', 'p6'],
+ iou_thresholds=[0.3, 0.7],
+ iou_labels=[0, -1, 1],
+ batch_size_per_image=256,
+ positive_fraction=0.5,
+ bbox_reg_loss_type='smooth_l1',
+ bbox_reg_loss_weight=1.0,
+ bbox_reg_weights=(1.0, 1.0, 1.0, 1.0),
+ smooth_l1_beta=0.0,
+ loss_weight=1.0,
+ boundary_thresh=-1,
+ pre_nms_topk_train=2000,
+ post_nms_topk_train=1000,
+ pre_nms_topk_test=1000,
+ post_nms_topk_test=1000,
+ nms_thresh=0.7,
+ conv_dims=[-1]),
+ roi_heads=dict(
+ name='StandardROIHeads',
+ num_classes=80,
+ in_features=['p2', 'p3', 'p4', 'p5'],
+ iou_thresholds=[0.5],
+ iou_labels=[0, 1],
+ batch_size_per_image=512,
+ positive_fraction=0.25,
+ score_thresh_test=0.05,
+ nms_thresh_test=0.5,
+ proposal_append_gt=True),
+ roi_box_head=dict(
+ name='FastRCNNConvFCHead',
+ num_fc=2,
+ fc_dim=1024,
+ conv_dim=256,
+ pooler_type='ROIAlignV2',
+ pooler_resolution=7,
+ pooler_sampling_ratio=0,
+ bbox_reg_loss_type='smooth_l1',
+ bbox_reg_loss_weight=1.0,
+ bbox_reg_weights=(10.0, 10.0, 5.0, 5.0),
+ smooth_l1_beta=0.0,
+ cls_agnostic_bbox_reg=False),
+ roi_mask_head=dict(
+ name='MaskRCNNConvUpsampleHead',
+ conv_dim=256,
+ num_conv=4,
+ pooler_type='ROIAlignV2',
+ pooler_resolution=14,
+ pooler_sampling_ratio=0,
+ cls_agnostic_mask=False)))
diff --git a/grounding-dino/mmdetection/configs/misc/d2_retinanet_r50-caffe_fpn_ms-90k_coco.py b/grounding-dino/mmdetection/configs/misc/d2_retinanet_r50-caffe_fpn_ms-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d3f7587648bde1d15b5c3c1e1ace6c35bb7c20b0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/misc/d2_retinanet_r50-caffe_fpn_ms-90k_coco.py
@@ -0,0 +1,48 @@
+_base_ = '../common/ms-90k_coco.py'
+
+# model settings
+model = dict(
+ type='Detectron2Wrapper',
+ bgr_to_rgb=False,
+ detector=dict(
+ # The settings in `d2_detector` will merged into default settings
+ # in detectron2. More details please refer to
+ # https://github.com/facebookresearch/detectron2/blob/main/detectron2/config/defaults.py # noqa
+ meta_architecture='RetinaNet',
+ # If you want to finetune the detector, you can use the
+ # checkpoint released by detectron2, for example:
+ # weights='detectron2://COCO-Detection/retinanet_R_50_FPN_1x/190397773/model_final_bfca0b.pkl' # noqa
+ weights='detectron2://ImageNetPretrained/MSRA/R-50.pkl',
+ mask_on=False,
+ pixel_mean=[103.530, 116.280, 123.675],
+ pixel_std=[1.0, 1.0, 1.0],
+ backbone=dict(name='build_retinanet_resnet_fpn_backbone', freeze_at=2),
+ resnets=dict(
+ depth=50,
+ out_features=['res3', 'res4', 'res5'],
+ num_groups=1,
+ norm='FrozenBN'),
+ fpn=dict(in_features=['res3', 'res4', 'res5'], out_channels=256),
+ anchor_generator=dict(
+ name='DefaultAnchorGenerator',
+ sizes=[[x, x * 2**(1.0 / 3), x * 2**(2.0 / 3)]
+ for x in [32, 64, 128, 256, 512]],
+ aspect_ratios=[[0.5, 1.0, 2.0]],
+ angles=[[-90, 0, 90]]),
+ retinanet=dict(
+ num_classes=80,
+ in_features=['p3', 'p4', 'p5', 'p6', 'p7'],
+ num_convs=4,
+ iou_thresholds=[0.4, 0.5],
+ iou_labels=[0, -1, 1],
+ bbox_reg_weights=(1.0, 1.0, 1.0, 1.0),
+ bbox_reg_loss_type='smooth_l1',
+ smooth_l1_loss_beta=0.0,
+ focal_loss_gamma=2.0,
+ focal_loss_alpha=0.25,
+ prior_prob=0.01,
+ score_thresh_test=0.05,
+ topk_candidates_test=1000,
+ nms_thresh_test=0.5)))
+
+optim_wrapper = dict(optimizer=dict(lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/README.md b/grounding-dino/mmdetection/configs/mm_grounding_dino/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..c88cb1c902667e4bb480eb143d7b1268c35433dd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/README.md
@@ -0,0 +1,387 @@
+# MM Grounding DINO
+
+> [An Open and Comprehensive Pipeline for Unified Object Grounding and Detection](https://arxiv.org/abs/2401.02361)
+
+
+
+## Abstract
+
+Grounding-DINO is a state-of-the-art open-set detection model that tackles multiple vision tasks including Open-Vocabulary Detection (OVD), Phrase Grounding (PG), and Referring Expression Comprehension (REC). Its effectiveness has led to its widespread adoption as a mainstream architecture for various downstream applications. However, despite its significance, the original Grounding-DINO model lacks comprehensive public technical details due to the unavailability of its training code. To bridge this gap, we present MM-Grounding-DINO, an open-source, comprehensive, and user-friendly baseline, which is built with the MMDetection toolbox. It adopts abundant vision datasets for pre-training and various detection and grounding datasets for fine-tuning. We give a comprehensive analysis of each reported result and detailed settings for reproduction. The extensive experiments on the benchmarks mentioned demonstrate that our MM-Grounding-DINO-Tiny outperforms the Grounding-DINO-Tiny baseline. We release all our models to the research community.
+
+
+
+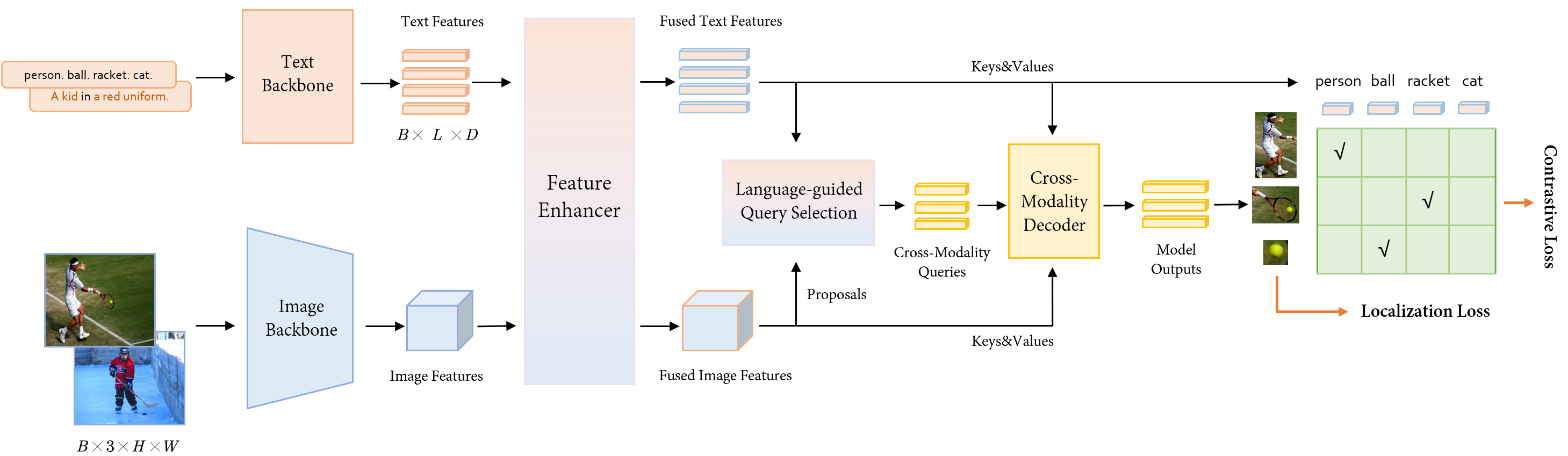 +
+
+
+
+
+
+
+## Dataset Preparation
+
+Please refer to [dataset_prepare.md](dataset_prepare.md) or [中文版数据准备](dataset_prepare_zh-CN.md)
+
+## ✨ What's New
+
+💎 **We have released the pre-trained weights for Swin-B and Swin-L, welcome to try and give feedback.**
+
+## Usage
+
+Please refer to [usage.md](usage.md) or [中文版用法说明](usage_zh-CN.md)
+
+## Zero-Shot COCO Results and Models
+
+| Model | Backbone | Style | COCO mAP | Pre-Train Data | Config | Download |
+| :----------: | :------: | :-------: | :--------: | :----------------------: | :------------------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| GDINO-T | Swin-T | Zero-shot | 46.7 | O365 | | |
+| GDINO-T | Swin-T | Zero-shot | 48.1 | O365,GoldG | | |
+| GDINO-T | Swin-T | Zero-shot | 48.4 | O365,GoldG,Cap4M | [config](../grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/grounding_dino/groundingdino_swint_ogc_mmdet-822d7e9d.pth) |
+| MM-GDINO-T | Swin-T | Zero-shot | 48.5(+1.8) | O365 | [config](grounding_dino_swin-t_pretrain_obj365.py) | |
+| MM-GDINO-T | Swin-T | Zero-shot | 50.4(+2.3) | O365,GoldG | [config](grounding_dino_swin-t_pretrain_obj365_goldg.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg/grounding_dino_swin-t_pretrain_obj365_goldg_20231122_132602-4ea751ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg/grounding_dino_swin-t_pretrain_obj365_goldg_20231122_132602.log.json) |
+| MM-GDINO-T | Swin-T | Zero-shot | 50.5(+2.1) | O365,GoldG,GRIT | [config](grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_20231128_200818-169cc352.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_20231128_200818.log.json) |
+| MM-GDINO-T | Swin-T | Zero-shot | 50.6(+2.2) | O365,GoldG,V3Det | [config](grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_v3det_20231218_095741-e316e297.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_v3det_20231218_095741.log.json) |
+| MM-GDINO-T | Swin-T | Zero-shot | 50.4(+2.0) | O365,GoldG,GRIT,V3Det | [config](grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047.log.json) |
+| MM-GDINO-B | Swin-B | Zero-shot | 52.5 | O365,GoldG,V3Det | [config](grounding_dino_swin-b_pretrain_obj365_goldg_v3det.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det/grounding_dino_swin-b_pretrain_obj365_goldg_v3de-f83eef00.pth) \| [log](<>) |
+| MM-GDINO-B\* | Swin-B | - | 59.5 | O365,ALL | [config](grounding_dino_swin-b_pretrain_all.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-b_pretrain_all/grounding_dino_swin-b_pretrain_all-f9818a7c.pth) \| [log](<>) |
+| MM-GDINO-L | Swin-L | Zero-shot | 53.0 | O365V2,OpenImageV6,GoldG | [config](grounding_dino_swin-l_pretrain_obj365_goldg.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg/grounding_dino_swin-l_pretrain_obj365_goldg-34dcdc53.pth) \| [log](<>) |
+| MM-GDINO-L\* | Swin-L | - | 60.3 | O365V2,OpenImageV6,ALL | [config](grounding_dino_swin-l_pretrain_all.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-l_pretrain_all/grounding_dino_swin-l_pretrain_all-56d69e78.pth) \| [log](<>) |
+
+- This * indicates that the model has not been fully trained yet. We will release the final weights in the future.
+- ALL: GoldG,V3det,COCO2017,LVISV1,COCO2014,GRIT,RefCOCO,RefCOCO+,RefCOCOg,gRefCOCO.
+
+## Zero-Shot LVIS Results
+
+| Model | MiniVal APr | MiniVal APc | MiniVal APf | MiniVal AP | Val1.0 APr | Val1.0 APc | Val1.0 APf | Val1.0 AP | Pre-Train Data |
+| :--------: | :---------: | :---------: | :---------: | :---------: | :--------: | :--------: | :--------: | :---------: | :-------------------: |
+| GDINO-T | 18.8 | 24.2 | 34.7 | 28.8 | 10.1 | 15.3 | 29.9 | 20.1 | O365,GoldG,Cap4M |
+| MM-GDINO-T | 28.1 | 30.2 | 42.0 | 35.7(+6.9) | 17.1 | 22.4 | 36.5 | 27.0(+6.9) | O365,GoldG |
+| MM-GDINO-T | 26.6 | 32.4 | 41.8 | 36.5(+7.7) | 17.3 | 22.6 | 36.4 | 27.1(+7.0) | O365,GoldG,GRIT |
+| MM-GDINO-T | 33.0 | 36.0 | 45.9 | 40.5(+11.7) | 21.5 | 25.5 | 40.2 | 30.6(+10.5) | O365,GoldG,V3Det |
+| MM-GDINO-T | 34.2 | 37.4 | 46.2 | 41.4(+12.6) | 23.6 | 27.6 | 40.5 | 31.9(+11.8) | O365,GoldG,GRIT,V3Det |
+
+- The MM-GDINO-T config file is [mini-lvis](lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py) and [lvis 1.0](lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py)
+
+## Zero-Shot ODinW (Object Detection in the Wild) Results
+
+### Results and models of ODinW13
+
+| Method | GDINO-T (O365,GoldG,Cap4M) | MM-GDINO-T
(O365,GoldG) | MM-GDINO-T
(O365,GoldG,GRIT) | MM-GDINO-T
(O365,GoldG,V3Det) | MM-GDINO-T
(O365,GoldG,GRIT,V3Det) | +| --------------------- | -------------------------------- | ----------------------------- | ---------------------------------- | ----------------------------------- | ---------------------------------------- | +| AerialMaritimeDrone | 0.173 | 0.133 | 0.155 | 0.177 | 0.151 | +| Aquarium | 0.195 | 0.252 | 0.261 | 0.266 | 0.283 | +| CottontailRabbits | 0.799 | 0.771 | 0.810 | 0.778 | 0.786 | +| EgoHands | 0.608 | 0.499 | 0.537 | 0.506 | 0.519 | +| NorthAmericaMushrooms | 0.507 | 0.331 | 0.462 | 0.669 | 0.767 | +| Packages | 0.687 | 0.707 | 0.687 | 0.710 | 0.706 | +| PascalVOC | 0.563 | 0.565 | 0.580 | 0.556 | 0.566 | +| pistols | 0.726 | 0.585 | 0.709 | 0.671 | 0.729 | +| pothole | 0.215 | 0.136 | 0.285 | 0.199 | 0.243 | +| Raccoon | 0.549 | 0.469 | 0.511 | 0.553 | 0.535 | +| ShellfishOpenImages | 0.393 | 0.321 | 0.437 | 0.519 | 0.488 | +| thermalDogsAndPeople | 0.657 | 0.556 | 0.603 | 0.493 | 0.542 | +| VehiclesOpenImages | 0.613 | 0.566 | 0.603 | 0.614 | 0.615 | +| Average | **0.514** | **0.453** | **0.511** | **0.516** | **0.533** | + +- The MM-GDINO-T config file is [odinw13](odinw/grounding_dino_swin-t_pretrain_odinw13.py) + +### Results and models of ODinW35 + +| Method | GDINO-T
(O365,GoldG,Cap4M) | MM-GDINO-T
(O365,GoldG) | MM-GDINO-T
(O365,GoldG,GRIT) | MM-GDINO-T
(O365,GoldG,V3Det) | MM-GDINO-T
(O365,GoldG,GRIT,V3Det) | +| --------------------------- | -------------------------------- | ----------------------------- | ---------------------------------- | ----------------------------------- | ---------------------------------------- | +| AerialMaritimeDrone_large | 0.173 | 0.133 | 0.155 | 0.177 | 0.151 | +| AerialMaritimeDrone_tiled | 0.206 | 0.170 | 0.225 | 0.184 | 0.206 | +| AmericanSignLanguageLetters | 0.002 | 0.016 | 0.020 | 0.011 | 0.007 | +| Aquarium | 0.195 | 0.252 | 0.261 | 0.266 | 0.283 | +| BCCD | 0.161 | 0.069 | 0.118 | 0.083 | 0.077 | +| boggleBoards | 0.000 | 0.002 | 0.001 | 0.001 | 0.002 | +| brackishUnderwater | 0.021 | 0.033 | 0.021 | 0.025 | 0.025 | +| ChessPieces | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | +| CottontailRabbits | 0.806 | 0.771 | 0.810 | 0.778 | 0.786 | +| dice | 0.004 | 0.002 | 0.005 | 0.001 | 0.001 | +| DroneControl | 0.042 | 0.047 | 0.097 | 0.088 | 0.074 | +| EgoHands_generic | 0.608 | 0.527 | 0.537 | 0.506 | 0.519 | +| EgoHands_specific | 0.002 | 0.001 | 0.005 | 0.007 | 0.003 | +| HardHatWorkers | 0.046 | 0.048 | 0.070 | 0.070 | 0.108 | +| MaskWearing | 0.004 | 0.009 | 0.004 | 0.011 | 0.009 | +| MountainDewCommercial | 0.430 | 0.453 | 0.465 | 0.194 | 0.430 | +| NorthAmericaMushrooms | 0.471 | 0.331 | 0.462 | 0.669 | 0.767 | +| openPoetryVision | 0.000 | 0.001 | 0.000 | 0.000 | 0.000 | +| OxfordPets_by_breed | 0.003 | 0.002 | 0.004 | 0.006 | 0.004 | +| OxfordPets_by_species | 0.011 | 0.019 | 0.016 | 0.020 | 0.015 | +| PKLot | 0.001 | 0.004 | 0.002 | 0.008 | 0.007 | +| Packages | 0.695 | 0.707 | 0.687 | 0.710 | 0.706 | +| PascalVOC | 0.563 | 0.565 | 0.580 | 0.566 | 0.566 | +| pistols | 0.726 | 0.585 | 0.709 | 0.671 | 0.729 | +| plantdoc | 0.005 | 0.005 | 0.007 | 0.008 | 0.011 | +| pothole | 0.215 | 0.136 | 0.219 | 0.077 | 0.168 | +| Raccoons | 0.549 | 0.469 | 0.511 | 0.553 | 0.535 | +| selfdrivingCar | 0.089 | 0.091 | 0.076 | 0.094 | 0.083 | +| ShellfishOpenImages | 0.393 | 0.321 | 0.437 | 0.519 | 0.488 | +| ThermalCheetah | 0.087 | 0.063 | 0.081 | 0.030 | 0.045 | +| thermalDogsAndPeople | 0.657 | 0.556 | 0.603 | 0.493 | 0.543 | +| UnoCards | 0.006 | 0.012 | 0.010 | 0.009 | 0.005 | +| VehiclesOpenImages | 0.613 | 0.566 | 0.603 | 0.614 | 0.615 | +| WildfireSmoke | 0.134 | 0.106 | 0.154 | 0.042 | 0.127 | +| websiteScreenshots | 0.012 | 0.02 | 0.016 | 0.016 | 0.016 | +| Average | **0.227** | **0.202** | **0.228** | **0.214** | **0.284** | + +- The MM-GDINO-T config file is [odinw35](odinw/grounding_dino_swin-t_pretrain_odinw35.py) + +## Zero-Shot Referring Expression Comprehension Results + +| Method | GDINO-T
(O365,GoldG,Cap4M) | MM-GDINO-T
(O365,GoldG) | MM-GDINO-T
(O365,GoldG,GRIT) | MM-GDINO-T
(O365,GoldG,V3Det) | MM-GDINO-T
(O365,GoldG,GRIT,V3Det) | +| ---------------------- | -------------------------------- | ----------------------------- | ---------------------------------- | ----------------------------------- | ---------------------------------------- | +| RefCOCO val @1,5,10 | 50.8/89.5/94.9 | 53.1/89.9/94.7 | 53.4/90.3/95.5 | 52.1/89.8/95.0 | 53.1/89.7/95.1 | +| RefCOCO testA @1,5,10 | 57.4/91.3/95.6 | 59.7/91.5/95.9 | 58.8/91.70/96.2 | 58.4/86.8/95.6 | 59.1/91.0/95.5 | +| RefCOCO testB @1,5,10 | 45.0/86.5/92.9 | 46.4/86.9/92.2 | 46.8/87.7/93.3 | 45.4/86.2/92.6 | 46.8/87.8/93.6 | +| RefCOCO+ val @1,5,10 | 51.6/86.4/92.6 | 53.1/87.0/92.8 | 53.5/88.0/93.7 | 52.5/86.8/93.2 | 52.7/87.7/93.5 | +| RefCOCO+ testA @1,5,10 | 57.3/86.7/92.7 | 58.9/87.3/92.9 | 59.0/88.1/93.7 | 58.1/86.7/93.5 | 58.7/87.2/93.1 | +| RefCOCO+ testB @1,5,10 | 46.4/84.1/90.7 | 47.9/84.3/91.0 | 47.9/85.5/92.7 | 46.9/83.7/91.5 | 48.4/85.8/92.1 | +| RefCOCOg val @1,5,10 | 60.4/92.1/96.2 | 61.2/92.6/96.1 | 62.7/93.3/97.0 | 61.7/92.9/96.6 | 62.9/93.3/97.2 | +| RefCOCOg test @1,5,10 | 59.7/92.1/96.3 | 61.1/93.3/96.7 | 62.6/94.9/97.1 | 61.0/93.1/96.8 | 62.9/93.9/97.4 | + +| Method | thresh_score | GDINO-T
(O365,GoldG,Cap4M) | MM-GDINO-T
(O365,GoldG) | MM-GDINO-T
(O365,GoldG,GRIT) | MM-GDINO-T
(O365,GoldG,V3Det) | MM-GDINO-T
(O365,GoldG,GRIT,V3Det) | +| --------------------------------------- | ------------ | -------------------------------- | ----------------------------- | ---------------------------------- | ----------------------------------- | ---------------------------------------- | +| gRefCOCO val Pr@(F1=1, IoU≥0.5),N-acc | 0.5 | 39.3/70.4 | | | | 39.4/67.5 | +| gRefCOCO val Pr@(F1=1, IoU≥0.5),N-acc | 0.6 | 40.5/83.8 | | | | 40.6/83.1 | +| gRefCOCO val Pr@(F1=1, IoU≥0.5),N-acc | 0.7 | 41.3/91.8 | 39.8/84.7 | 40.7/89.7 | 40.3/88.8 | 41.0/91.3 | +| gRefCOCO val Pr@(F1=1, IoU≥0.5),N-acc | 0.8 | 41.5/96.8 | | | | 41.1/96.4 | +| gRefCOCO testA Pr@(F1=1, IoU≥0.5),N-acc | 0.5 | 31.9/70.4 | | | | 33.1/69.5 | +| gRefCOCO testA Pr@(F1=1, IoU≥0.5),N-acc | 0.6 | 29.3/82.9 | | | | 29.2/84.3 | +| gRefCOCO testA Pr@(F1=1, IoU≥0.5),N-acc | 0.7 | 27.2/90.2 | 26.3/89.0 | 26.0/91.9 | 25.4/91.8 | 26.1/93.0 | +| gRefCOCO testA Pr@(F1=1, IoU≥0.5),N-acc | 0.8 | 25.1/96.3 | | | | 23.8/97.2 | +| gRefCOCO testB Pr@(F1=1, IoU≥0.5),N-acc | 0.5 | 30.9/72.5 | | | | 33.0/69.6 | +| gRefCOCO testB Pr@(F1=1, IoU≥0.5),N-acc | 0.6 | 30.0/86.1 | | | | 31.6/96.7 | +| gRefCOCO testB Pr@(F1=1, IoU≥0.5),N-acc | 0.7 | 29.7/93.5 | 31.3/84.8 | 30.6/90.2 | 30.7/89.9 | 30.4/92.3 | +| gRefCOCO testB Pr@(F1=1, IoU≥0.5),N-acc | 0.8 | 29.1/97.4 | | | | 29.5/84.2 | + +- The MM-GDINO-T config file is [here](refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py) + +## Zero-Shot Description Detection Dataset(DOD) + +```shell +pip install ddd-dataset +``` + +| Method | mode | GDINO-T
(O365,GoldG,Cap4M) | MM-GDINO-T
(O365,GoldG) | MM-GDINO-T
(O365,GoldG,GRIT) | MM-GDINO-T
(O365,GoldG,V3Det) | MM-GDINO-T
(O365,GoldG,GRIT,V3Det) | +| -------------------------------- | -------- | -------------------------------- | ----------------------------- | ---------------------------------- | ----------------------------------- | ---------------------------------------- | +| FULL/short/middle/long/very long | concat | 17.2/18.0/18.7/14.8/16.3 | 15.6/17.3/16.7/14.3/13.1 | 17.0/17.7/18.0/15.7/15.7 | 16.2/17.4/16.8/14.9/15.4 | 17.5/23.4/18.3/14.7/13.8 | +| FULL/short/middle/long/very long | parallel | 22.3/28.2/24.8/19.1/13.9 | 21.7/24.7/24.0/20.2/13.7 | 22.5/25.6/25.1/20.5/14.9 | 22.3/25.6/24.5/20.6/14.7 | 22.9/28.1/25.4/20.4/14.4 | +| PRES/short/middle/long/very long | concat | 17.8/18.3/19.2/15.2/17.3 | 16.4/18.4/17.3/14.5/14.2 | 17.9/19.0/18.3/16.5/17.5 | 16.6/18.8/17.1/15.1/15.0 | 18.0/23.7/18.6/15.4/13.3 | +| PRES/short/middle/long/very long | parallel | 21.0/27.0/22.8/17.5/12.5 | 21.3/25.5/22.8/19.2/12.9 | 21.5/25.2/23.0/19.0/15.0 | 21.6/25.7/23.0/19.5/14.8 | 21.9/27.4/23.2/19.1/14.2 | +| ABS/short/middle/long/very long | concat | 15.4/17.1/16.4/13.6/14.9 | 13.4/13.4/14.5/13.5/11.9 | 14.5/13.1/16.7/13.6/13.3 | 14.8/12.5/15.6/14.3/15.8 | 15.9/22.2/17.1/12.5/14.4 | +| ABS/short/middle/long/very long | parallel | 26.0/32.0/33.0/23.6/15.5 | 22.8/22.2/28.7/22.9/14.7 | 25.6/26.8/33.9/24.5/14.7 | 24.1/24.9/30.7/23.8/14.7 | 26.0/30.3/34.1/23.9/14.6 | + +Note: + +1. Considering that the evaluation time for Inter-scenario is very long and the performance is low, it is temporarily not supported. The mentioned metrics are for Intra-scenario. +2. `concat` is the default inference mode for Grounding DINO, where it concatenates multiple sub-sentences with "." to form a single sentence for inference. On the other hand, "parallel" performs inference on each sub-sentence in a for-loop. +3. The MM-GDINO-T config file is [concat_dod](dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py) and [parallel_dod](dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py) + +## Pretrain Flickr30k Results + +| Model | Pre-Train Data | Val R@1 | Val R@5 | Val R@10 | Test R@1 | Test R@5 | Test R@10 | +| :--------: | :-------------------: | ------- | ------- | -------- | -------- | -------- | --------- | +| GLIP-T | O365,GoldG | 84.9 | 94.9 | 96.3 | 85.6 | 95.4 | 96.7 | +| GLIP-T | O365,GoldG,CC3M,SBU | 85.3 | 95.5 | 96.9 | 86.0 | 95.9 | 97.2 | +| GDINO-T | O365,GoldG,Cap4M | 87.8 | 96.6 | 98.0 | 88.1 | 96.9 | 98.2 | +| MM-GDINO-T | O365,GoldG | 85.5 | 95.6 | 97.2 | 86.2 | 95.7 | 97.4 | +| MM-GDINO-T | O365,GoldG,GRIT | 86.7 | 95.8 | 97.6 | 87.0 | 96.2 | 97.7 | +| MM-GDINO-T | O365,GoldG,V3Det | 85.9 | 95.7 | 97.4 | 86.3 | 95.7 | 97.4 | +| MM-GDINO-T | O365,GoldG,GRIT,V3Det | 86.7 | 96.0 | 97.6 | 87.2 | 96.2 | 97.7 | + +Note: + +1. `@1,5,10` refers to precision at the top 1, 5, and 10 positions in a predicted ranked list. +2. The MM-GDINO-T config file is [here](flickr30k/grounding_dino_swin-t-pretrain_flickr30k.py) + +## Validating the generalization of a pre-trained model through fine-tuning + +### RTTS + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | ------- | -------- | +| Faster R-CNN | R-50 | 1x | 48.1 | +| Cascade R-CNN | R-50 | 1x | 50.8 | +| ATSS | R-50 | 1x | 48.2 | +| TOOD | R-50 | 1X | 50.8 | +| MM-GDINO(zero-shot) | Swin-T | | 49.8 | +| MM-GDINO | Swin-T | 1x | **69.1** | + +- The reference metrics come from https://github.com/BIGWangYuDong/lqit/tree/main/configs/detection/rtts_dataset +- The MM-GDINO-T config file is [here](rtts/grounding_dino_swin-t_finetune_8xb4_1x_rtts.py) + +### RUOD + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | ------- | -------- | +| Faster R-CNN | R-50 | 1x | 52.4 | +| Cascade R-CNN | R-50 | 1x | 55.3 | +| ATSS | R-50 | 1x | 55.7 | +| TOOD | R-50 | 1X | 57.4 | +| MM-GDINO(zero-shot) | Swin-T | | 29.8 | +| MM-GDINO | Swin-T | 1x | **65.5** | + +- The reference metrics come from https://github.com/BIGWangYuDong/lqit/tree/main/configs/detection/ruod_dataset +- The MM-GDINO-T config file is [here](ruod/grounding_dino_swin-t_finetune_8xb4_1x_ruod.py) + +### Brain Tumor + +| Architecture | Backbone | Lr schd | box AP | +| :-----------: | :------: | ------- | ------ | +| Faster R-CNN | R-50 | 50e | 43.5 | +| Cascade R-CNN | R-50 | 50e | 46.2 | +| DINO | R-50 | 50e | 46.4 | +| Cascade-DINO | R-50 | 50e | 48.6 | +| MM-GDINO | Swin-T | 50e | 47.5 | + +- The reference metrics come from https://arxiv.org/abs/2307.11035 +- The MM-GDINO-T config file is [here](brain_tumor/grounding_dino_swin-t_finetune_8xb4_50e_brain_tumor.py) + +### Cityscapes + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | ------- | -------- | +| Faster R-CNN | R-50 | 50e | 30.1 | +| Cascade R-CNN | R-50 | 50e | 31.8 | +| DINO | R-50 | 50e | 34.5 | +| Cascade-DINO | R-50 | 50e | 34.8 | +| MM-GDINO(zero-shot) | Swin-T | | 34.2 | +| MM-GDINO | Swin-T | 50e | **51.5** | + +- The reference metrics come from https://arxiv.org/abs/2307.11035 +- The MM-GDINO-T config file is [here](cityscapes/grounding_dino_swin-t_finetune_8xb4_50e_cityscapes.py) + +### People in Painting + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | ------- | -------- | +| Faster R-CNN | R-50 | 50e | 17.0 | +| Cascade R-CNN | R-50 | 50e | 18.0 | +| DINO | R-50 | 50e | 12.0 | +| Cascade-DINO | R-50 | 50e | 13.4 | +| MM-GDINO(zero-shot) | Swin-T | | 23.1 | +| MM-GDINO | Swin-T | 50e | **38.9** | + +- The reference metrics come from https://arxiv.org/abs/2307.11035 +- The MM-GDINO-T config file is [here](people_in_painting/grounding_dino_swin-t_finetune_8xb4_50e_people_in_painting.py) + +### COCO + +**(1) Closed-set performance** + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | ------- | ------ | +| Faster R-CNN | R-50 | 1x | 37.4 | +| Cascade R-CNN | R-50 | 1x | 40.3 | +| ATSS | R-50 | 1x | 39.4 | +| TOOD | R-50 | 1X | 42.4 | +| DINO | R-50 | 1X | 50.1 | +| GLIP(zero-shot) | Swin-T | | 46.6 | +| GDINO(zero-shot) | Swin-T | | 48.5 | +| MM-GDINO(zero-shot) | Swin-T | | 50.4 | +| GLIP | Swin-T | 1x | 55.4 | +| GDINO | Swin-T | 1x | 58.1 | +| MM-GDINO | Swin-T | 1x | 58.2 | + +- The MM-GDINO-T config file is [here](coco/grounding_dino_swin-t_finetune_16xb4_1x_coco.py) + +**(2) Open-set continuing pretraining performance** + +| Architecture | Backbone | Lr schd | box AP | +| :-----------------: | :------: | :-----: | :----: | +| GLIP(zero-shot) | Swin-T | | 46.7 | +| GDINO(zero-shot) | Swin-T | | 48.5 | +| MM-GDINO(zero-shot) | Swin-T | | 50.4 | +| MM-GDINO | Swin-T | 1x | 54.7 | + +- The MM-GDINO-T config file is [here](coco/grounding_dino_swin-t_finetune_16xb4_1x_sft_coco.py) +- Due to the small size of the COCO dataset, continuing pretraining solely on COCO can easily lead to overfitting. The results shown above are from the third epoch. I do not recommend you train using this approach. + +**(3) Open vocabulary performance** + +| Architecture | Backbone | Lr schd | box AP | Base box AP | Novel box AP | box AP@50 | Base box AP@50 | Novel box AP@50 | +| :-----------------: | :------: | :-----: | :----: | :---------: | :----------: | :-------: | :------------: | :-------------: | +| MM-GDINO(zero-shot) | Swin-T | | 51.1 | 48.4 | 58.9 | 66.7 | 64.0 | 74.2 | +| MM-GDINO | Swin-T | 1x | 57.2 | 56.1 | 60.4 | 73.6 | 73.0 | 75.3 | + +- The MM-GDINO-T config file is [here](coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py) + +### LVIS 1.0 + +**(1) Open-set continuing pretraining performance** + +| Architecture | Backbone | Lr schd | MiniVal APr | MiniVal APc | MiniVal APf | MiniVal AP | Val1.0 APr | Val1.0 APc | Val1.0 APf | Val1.0 AP | +| :-----------------: | :------: | :-----: | :---------: | :---------: | :---------: | :--------: | :--------: | :--------: | :--------: | :-------: | +| GLIP(zero-shot) | Swin-T | | 18.1 | 21.2 | 33.1 | 26.7 | 10.8 | 14.7 | 29.0 | 19.6 | +| GDINO(zero-shot) | Swin-T | | 18.8 | 24.2 | 34.7 | 28.8 | 10.1 | 15.3 | 29.9 | 20.1 | +| MM-GDINO(zero-shot) | Swin-T | | 34.2 | 37.4 | 46.2 | 41.4 | 23.6 | 27.6 | 40.5 | 31.9 | +| MM-GDINO | Swin-T | 1x | 50.7 | 58.8 | 60.1 | 58.7 | 45.2 | 50.2 | 56.1 | 51.7 | + +- The MM-GDINO-T config file is [here](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py) + +**(2) Open vocabulary performance** + +| Architecture | Backbone | Lr schd | MiniVal APr | MiniVal APc | MiniVal APf | MiniVal AP | +| :-----------------: | :------: | :-----: | :---------: | :---------: | :---------: | :--------: | +| MM-GDINO(zero-shot) | Swin-T | | 34.2 | 37.4 | 46.2 | 41.4 | +| MM-GDINO | Swin-T | 1x | 43.2 | 57.4 | 59.3 | 57.1 | + +- The MM-GDINO-T config file is [here](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py) + +### RefEXP + +#### RefCOCO + +| Architecture | Backbone | Lr schd | val @1 | val @5 | val @10 | testA @1 | testA @5 | testA @10 | testB @1 | testB @5 | testB @10 | +| :-----------------: | :------: | :-----: | :----: | :----: | :-----: | :------: | :------: | :-------: | :------: | :------: | :-------: | +| GDINO(zero-shot) | Swin-T | | 50.8 | 89.5 | 94.9 | 57.5 | 91.3 | 95.6 | 45.0 | 86.5 | 92.9 | +| MM-GDINO(zero-shot) | Swin-T | | 53.1 | 89.7 | 95.1 | 59.1 | 91.0 | 95.5 | 46.8 | 87.8 | 93.6 | +| GDINO | Swin-T | UNK | 89.2 | | | 91.9 | | | 86.0 | | | +| MM-GDINO | Swin-T | 5e | 89.5 | 98.6 | 99.4 | 91.4 | 99.2 | 99.8 | 86.6 | 97.9 | 99.1 | + +- The MM-GDINO-T config file is [here](refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco.py) + +#### RefCOCO+ + +| Architecture | Backbone | Lr schd | val @1 | val @5 | val @10 | testA @1 | testA @5 | testA @10 | testB @1 | testB @5 | testB @10 | +| :-----------------: | :------: | :-----: | :----: | :----: | :-----: | :------: | :------: | :-------: | :------: | :------: | :-------: | +| GDINO(zero-shot) | Swin-T | | 51.6 | 86.4 | 92.6 | 57.3 | 86.7 | 92.7 | 46.4 | 84.1 | 90.7 | +| MM-GDINO(zero-shot) | Swin-T | | 52.7 | 87.7 | 93.5 | 58.7 | 87.2 | 93.1 | 48.4 | 85.8 | 92.1 | +| GDINO | Swin-T | UNK | 81.1 | | | 87.4 | | | 74.7 | | | +| MM-GDINO | Swin-T | 5e | 82.1 | 97.8 | 99.2 | 87.5 | 99.2 | 99.7 | 74.0 | 96.3 | 96.4 | + +- The MM-GDINO-T config file is [here](refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco_plus.py) + +#### RefCOCOg + +| Architecture | Backbone | Lr schd | val @1 | val @5 | val @10 | test @1 | test @5 | test @10 | +| :-----------------: | :------: | :-----: | :----: | :----: | :-----: | :-----: | :-----: | :------: | +| GDINO(zero-shot) | Swin-T | | 60.4 | 92.1 | 96.2 | 59.7 | 92.1 | 96.3 | +| MM-GDINO(zero-shot) | Swin-T | | 62.9 | 93.3 | 97.2 | 62.9 | 93.9 | 97.4 | +| GDINO | Swin-T | UNK | 84.2 | | | 84.9 | | | +| MM-GDINO | Swin-T | 5e | 85.5 | 98.4 | 99.4 | 85.8 | 98.6 | 99.4 | + +- The MM-GDINO-T config file is [here](refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcocog.py) + +#### gRefCOCO + +| Architecture | Backbone | Lr schd | val Pr@(F1=1, IoU≥0.5) | val N-acc | testA Pr@(F1=1, IoU≥0.5) | testA N-acc | testB Pr@(F1=1, IoU≥0.5) | testB N-acc | +| :-----------------: | :------: | :-----: | :--------------------: | :-------: | :----------------------: | :---------: | :----------------------: | :---------: | +| GDINO(zero-shot) | Swin-T | | 41.3 | 91.8 | 27.2 | 90.2 | 29.7 | 93.5 | +| MM-GDINO(zero-shot) | Swin-T | | 41.0 | 91.3 | 26.1 | 93.0 | 30.4 | 92.3 | +| MM-GDINO | Swin-T | 5e | 45.1 | 64.7 | 42.5 | 65.5 | 40.3 | 63.2 | + +- The MM-GDINO-T config file is [here](refcoco/grounding_dino_swin-t_finetune_8xb4_5e_grefcoco.py) + +## Citation + +If you find this project useful in your research, please consider citing: + +```latex +@article{zhao2024open, + title={An Open and Comprehensive Pipeline for Unified Object Grounding and Detection}, + author={Zhao, Xiangyu and Chen, Yicheng and Xu, Shilin and Li, Xiangtai and Wang, Xinjiang and Li, Yining and Huang, Haian}, + journal={arXiv preprint arXiv:2401.02361}, + year={2024} +} +``` diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/__pycache__/grounding_dino_swin-t_finetune_traffic.cpython-313.pyc b/grounding-dino/mmdetection/configs/mm_grounding_dino/__pycache__/grounding_dino_swin-t_finetune_traffic.cpython-313.pyc new file mode 100644 index 0000000000000000000000000000000000000000..3586c6254b74723973926685fdd683b960fe7a43 Binary files /dev/null and b/grounding-dino/mmdetection/configs/mm_grounding_dino/__pycache__/grounding_dino_swin-t_finetune_traffic.cpython-313.pyc differ diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/brain_tumor/grounding_dino_swin-t_finetune_8xb4_50e_brain_tumor.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/brain_tumor/grounding_dino_swin-t_finetune_8xb4_50e_brain_tumor.py new file mode 100644 index 0000000000000000000000000000000000000000..1172da5b64102413eec11f223f467ad4c03a7cdf --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/brain_tumor/grounding_dino_swin-t_finetune_8xb4_50e_brain_tumor.py @@ -0,0 +1,112 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +# https://universe.roboflow.com/roboflow-100/brain-tumor-m2pbp/dataset/2 +data_root = 'data/brain_tumor_v2/' +class_name = ('label0', 'label1', 'label2') +label_name = '_annotations.coco.json' + +palette = [(220, 20, 60), (255, 0, 0), (0, 0, 142)] + +metainfo = dict(classes=class_name, palette=palette) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + sampler=dict(_delete_=True, type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='RepeatDataset', + times=10, + dataset=dict( + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline, + return_classes=True, + data_prefix=dict(img='train/'), + ann_file='train/' + label_name))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + return_classes=True, + ann_file='valid/' + label_name, + data_prefix=dict(img='valid/'))) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'valid/' + label_name, + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict(custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1) + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[4], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/cityscapes/grounding_dino_swin-t_finetune_8xb4_50e_cityscapes.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/cityscapes/grounding_dino_swin-t_finetune_8xb4_50e_cityscapes.py new file mode 100644 index 0000000000000000000000000000000000000000..c4283413c4ba0c060144d7fb85f7d064a60577c7 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/cityscapes/grounding_dino_swin-t_finetune_8xb4_50e_cityscapes.py @@ -0,0 +1,110 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/cityscapes/' +class_name = ('person', 'rider', 'car', 'truck', 'bus', 'train', 'motorcycle', + 'bicycle') +palette = [(220, 20, 60), (255, 0, 0), (0, 0, 142), (0, 0, 70), (0, 60, 100), + (0, 80, 100), (0, 0, 230), (119, 11, 32)] + +metainfo = dict(classes=class_name, palette=palette) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + sampler=dict(_delete_=True, type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='RepeatDataset', + times=10, + dataset=dict( + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline, + return_classes=True, + data_prefix=dict(img='leftImg8bit/train/'), + ann_file='annotations/instancesonly_filtered_gtFine_train.json'))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + return_classes=True, + ann_file='annotations/instancesonly_filtered_gtFine_val.json', + data_prefix=dict(img='leftImg8bit/val/'))) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/instancesonly_filtered_gtFine_val.json', + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict(custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1) + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[4], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco.py new file mode 100644 index 0000000000000000000000000000000000000000..792297accd302d390f865bee294b1294863d6ac1 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco.py @@ -0,0 +1,85 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='CocoDataset', + data_root=data_root, + ann_file='annotations/instances_train2017.json', + data_prefix=dict(img='train2017/'), + return_classes=True, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline)) + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + 'language_model': dict(lr_mult=0.1), + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[8, 11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py new file mode 100644 index 0000000000000000000000000000000000000000..e68afbb43286af24612321129042e7d0e0f34b29 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py @@ -0,0 +1,157 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' +base_classes = ('person', 'bicycle', 'car', 'motorcycle', 'train', 'truck', + 'boat', 'bench', 'bird', 'horse', 'sheep', 'bear', 'zebra', + 'giraffe', 'backpack', 'handbag', 'suitcase', 'frisbee', + 'skis', 'kite', 'surfboard', 'bottle', 'fork', 'spoon', 'bowl', + 'banana', 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', + 'pizza', 'donut', 'chair', 'bed', 'toilet', 'tv', 'laptop', + 'mouse', 'remote', 'microwave', 'oven', 'toaster', + 'refrigerator', 'book', 'clock', 'vase', 'toothbrush') # 48 +novel_classes = ('airplane', 'bus', 'cat', 'dog', 'cow', 'elephant', + 'umbrella', 'tie', 'snowboard', 'skateboard', 'cup', 'knife', + 'cake', 'couch', 'keyboard', 'sink', 'scissors') # 17 +all_classes = ( + 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', + 'truck', 'boat', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow', + 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', + 'tie', 'suitcase', 'frisbee', 'skis', 'snowboard', 'kite', 'skateboard', + 'surfboard', 'bottle', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', + 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', 'pizza', 'donut', + 'cake', 'chair', 'couch', 'bed', 'toilet', 'tv', 'laptop', 'mouse', + 'remote', 'keyboard', 'microwave', 'oven', 'toaster', 'sink', + 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'toothbrush') # 65 + +train_metainfo = dict(classes=base_classes) +test_metainfo = dict( + classes=all_classes, + base_classes=base_classes, + novel_classes=novel_classes) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='CocoDataset', + metainfo=train_metainfo, + data_root=data_root, + ann_file='annotations/instances_train2017_seen_2.json', + data_prefix=dict(img='train2017/'), + return_classes=True, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline)) + +val_dataloader = dict( + batch_size=1, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False), + dataset=dict( + type='CocoDataset', + metainfo=test_metainfo, + data_root=data_root, + ann_file='annotations/instances_val2017_all_2.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=test_pipeline, + return_classes=True, + )) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='OVCocoMetric', + ann_file=data_root + 'annotations/instances_val2017_all_2.json', + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.00005, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[8, 11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +default_hooks = dict( + checkpoint=dict( + max_keep_ckpts=1, save_best='coco/novel_ap50', rule='greater')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_sft_coco.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_sft_coco.py new file mode 100644 index 0000000000000000000000000000000000000000..5505df58b8b103a93570519c20aaf0fcc144e91c --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/coco/grounding_dino_swin-t_finetune_16xb4_1x_sft_coco.py @@ -0,0 +1,93 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=20, # ======= important ===== + label_map_file='data/coco/annotations/coco2017_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ODVGDataset', + need_text=False, + data_root=data_root, + ann_file='annotations/instances_train2017_od.json', + label_map_file='annotations/coco2017_label_map.json', + data_prefix=dict(img='train2017/'), + return_classes=True, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline)) + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.00005, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + 'language_model': dict(lr_mult=0.0), + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[8, 11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare.md b/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare.md new file mode 100644 index 0000000000000000000000000000000000000000..af60a8bf4bf7ebc0dde342a7a9ec0bd05dc1fadd --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare.md @@ -0,0 +1,1193 @@ +# Data Prepare and Process + +## MM-GDINO-T Pre-train Dataset + +For the MM-GDINO-T model, we provide a total of 5 different data combination pre-training configurations. The data is trained in a progressive accumulation manner, so users can prepare it according to their actual needs. + +### 1 Objects365v1 + +The corresponding training config is [grounding_dino_swin-t_pretrain_obj365](./grounding_dino_swin-t_pretrain_obj365.py) + +Objects365v1 can be downloaded from [opendatalab](https://opendatalab.com/OpenDataLab/Objects365_v1). It offers two methods of download: CLI and SDK. + +After downloading and unzipping, place the dataset or create a symbolic link to the `data/objects365v1` directory. The directory structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v1 +│ │ ├── objects365_train.json +│ │ ├── objects365_val.json +│ │ ├── train +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── test +``` + +Then, use [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) to convert it into the ODVG format required for training. + +```shell +python tools/dataset_converters/coco2odvg.py data/objects365v1/objects365_train.json -d o365v1 +``` + +After the program runs successfully, it will create two new files, `o365v1_train_od.json` and `o365v1_label_map.json`, in the `data/objects365v1` directory. The complete structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v1 +│ │ ├── objects365_train.json +│ │ ├── objects365_val.json +│ │ ├── o365v1_train_od.json +│ │ ├── o365v1_label_map.json +│ │ ├── train +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── test +``` + +### 2 COCO 2017 + +The above configuration will evaluate the performance on the COCO 2017 dataset during the training process. Therefore, it is necessary to prepare the COCO 2017 dataset. You can download it from the [COCO](https://cocodataset.org/) official website or from [opendatalab](https://opendatalab.com/OpenDataLab/COCO_2017). + +After downloading and unzipping, place the dataset or create a symbolic link to the `data/coco` directory. The directory structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 3 GoldG + +After downloading the dataset, you can start training with the [grounding_dino_swin-t_pretrain_obj365_goldg](./grounding_dino_swin-t_pretrain_obj365_goldg.py) configuration. + +The GoldG dataset includes the `GQA` and `Flickr30k` datasets, which are part of the MixedGrounding dataset mentioned in the GLIP paper, excluding the COCO dataset. The download links are [mdetr_annotations](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations), and the specific files currently needed are `mdetr_annotations/final_mixed_train_no_coco.json` and `mdetr_annotations/final_flickr_separateGT_train.json`. + +Then download the [GQA images](https://nlp.stanford.edu/data/gqa/images.zip). After downloading and unzipping, place the dataset or create a symbolic link to them in the `data/gqa` directory, with the following directory structure: + +```text +mmdetection +├── configs +├── data +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +Then download the [Flickr30k images](http://shannon.cs.illinois.edu/DenotationGraph/). You need to apply for access to this dataset and then download it using the provided link. After downloading and unzipping, place the dataset or create a symbolic link to them in the `data/flickr30k_entities` directory, with the following directory structure: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +For the GQA dataset, you need to use [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/goldg2odvg.py data/gqa/final_mixed_train_no_coco.json +``` + +After the program has run, a new file `final_mixed_train_no_coco_vg.json` will be created in the `data/gqa` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +| | ├── final_mixed_train_no_coco_vg.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +For the Flickr30k dataset, you need to use [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/goldg2odvg.py data/flickr30k_entities/final_flickr_separateGT_train.json +``` + +After the program has run, a new file `final_flickr_separateGT_train_vg.json` will be created in the `data/flickr30k_entities` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 4 GRIT-20M + +The corresponding training configuration is [grounding_dino_swin-t_pretrain_obj365_goldg_grit9m](./grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py). + +The GRIT dataset can be downloaded using the img2dataset package from [GRIT](https://huggingface.co/datasets/zzliang/GRIT#download-image). By default, the dataset size is 1.1T, and downloading and processing it may require at least 2T of disk space, depending on your available storage capacity. After downloading, the dataset is in its original format, which includes: + +```text +mmdetection +├── configs +├── data +│ ├── grit_raw +│ │ ├── 00000_stats.json +│ │ ├── 00000.parquet +│ │ ├── 00000.tar +│ │ ├── 00001_stats.json +│ │ ├── 00001.parquet +│ │ ├── 00001.tar +│ │ ├── ... +``` + +After downloading, further format processing is required: + +```shell +python tools/dataset_converters/grit_processing.py data/grit_raw data/grit_processed +``` + +The processed format is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── grit_processed +│ │ ├── annotations +│ │ │ ├── 00000.json +│ │ │ ├── 00001.json +│ │ │ ├── ... +│ │ ├── images +│ │ │ ├── 00000 +│ │ │ │ ├── 000000000.jpg +│ │ │ │ ├── 000000003.jpg +│ │ │ │ ├── 000000004.jpg +│ │ │ │ ├── ... +│ │ │ ├── 00001 +│ │ │ ├── ... +``` + +As for the GRIT dataset, you need to use [grit2odvg.py](../../tools/dataset_converters/grit2odvg.py) to convert it to the format of ODVG: + +```shell +python tools/dataset_converters/grit2odvg.py data/grit_processed/ +``` + +After the program has run, a new file `grit20m_vg.json` will be created in the `data/grit_processed` directory, which has about 9M data, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── grit_processed +| | ├── grit20m_vg.json +│ │ ├── annotations +│ │ │ ├── 00000.json +│ │ │ ├── 00001.json +│ │ │ ├── ... +│ │ ├── images +│ │ │ ├── 00000 +│ │ │ │ ├── 000000000.jpg +│ │ │ │ ├── 000000003.jpg +│ │ │ │ ├── 000000004.jpg +│ │ │ │ ├── ... +│ │ │ ├── 00001 +│ │ │ ├── ... +``` + +### 5 V3Det + +The corresponding training configurations are: + +- [grounding_dino_swin-t_pretrain_obj365_goldg_v3det](./grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py) +- [grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det](./grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py) + +The V3Det dataset can be downloaded from [opendatalab](https://opendatalab.com/V3Det/V3Det). After downloading and unzipping, place the dataset or create a symbolic link to it in the `data/v3det` directory, with the following directory structure: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +Then use [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/coco2odvg.py data/v3det/annotations/v3det_2023_v1_train.json -d v3det +``` + +After the program has run, two new files `v3det_2023_v1_train_od.json` and `v3det_2023_v1_label_map.json` will be created in the `data/v3det/annotations` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ | ├── v3det_2023_v1_train_od.json +│ │ | ├── v3det_2023_v1_label_map.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 6 Data Splitting and Visualization + +Considering that users need to prepare many datasets, which is inconvenient for confirming images and annotations before training, we provide a data splitting and visualization tool. This tool can split the dataset into a tiny version and then use a visualization script to check the correctness of the images and labels. + +1. Splitting the Dataset + +The script is located [here](../../tools/misc/split_odvg.py). Taking `Object365 v1` as an example, the command to split the dataset is as follows: + +```shell +python tools/misc/split_odvg.py data/object365_v1/ o365v1_train_od.json train your_output_dir --label-map-file o365v1_label_map.json -n 200 +``` + +After running the above script, it will create a folder structure in the `your_output_dir` directory identical to `data/object365_v1/`, but it will only save 200 training images and their corresponding json files for convenient user review. + +2. Visualizing the Original Dataset + +The script is located [here](../../tools/analysis_tools/browse_grounding_raw.py). Taking `Object365 v1` as an example, the command to visualize the dataset is as follows: + +```shell +python tools/analysis_tools/browse_grounding_raw.py data/object365_v1/ o365v1_train_od.json train --label-map-file o365v1_label_map.json -o your_output_dir --not-show +``` + +After running the above script, it will generate images in the `your_output_dir` directory that include both the pictures and their labels, making it convenient for users to review. + +3. Visualizing the Output Dataset + +The script is located [here](../../tools/analysis_tools/browse_grounding_dataset.py). Users can use this script to view the results of the dataset output, including the results of data augmentation. Taking `Object365 v1` as an example, the command to visualize the dataset is as follows: + +```shell +python tools/analysis_tools/browse_grounding_dataset.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py -o your_output_dir --not-show +``` + +After running the above script, it will generate images in the `your_output_dir` directory that include both the pictures and their labels, making it convenient for users to review. + +## MM-GDINO-L Pre-training Data Preparation and Processing + +### 1 Object365 v2 + +Objects365_v2 can be downloaded from [opendatalab](https://opendatalab.com/OpenDataLab/Objects365). It offers two download methods: CLI and SDK. + +After downloading and unzipping, place the dataset or create a symbolic link to it in the `data/objects365v2` directory, with the following directory structure: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v2 +│ │ ├── annotations +│ │ │ ├── zhiyuan_objv2_train.json +│ │ ├── train +│ │ │ ├── patch0 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +Since some category names in Objects365v2 are incorrect, it is necessary to correct them first. + +```shell +python tools/dataset_converters/fix_o365_names.py +``` + +A new annotation file `zhiyuan_objv2_train_fixname.json` will be generated in the `data/objects365v2/annotations` directory. + +Then use [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/coco2odvg.py data/objects365v2/annotations/zhiyuan_objv2_train_fixname.json -d o365v2 +``` + +After the program has run, two new files `zhiyuan_objv2_train_fixname_od.json` and `o365v2_label_map.json` will be created in the `data/objects365v2` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v2 +│ │ ├── annotations +│ │ │ ├── zhiyuan_objv2_train.json +│ │ │ ├── zhiyuan_objv2_train_fixname.json +│ │ │ ├── zhiyuan_objv2_train_fixname_od.json +│ │ │ ├── o365v2_label_map.json +│ │ ├── train +│ │ │ ├── patch0 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 2 OpenImages v6 + +OpenImages v6 can be downloaded from the [official website](https://storage.googleapis.com/openimages/web/download_v6.html). Due to the large size of the dataset, it may take some time to download. After completion, the file structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── OpenImages +│ │ ├── annotations +| │ │ ├── oidv6-train-annotations-bbox.csv +| │ │ ├── class-descriptions-boxable.csv +│ │ ├── OpenImages +│ │ │ ├── train +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +Then use [openimages2odvg.py](../../tools/dataset_converters/openimages2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/openimages2odvg.py data/OpenImages/annotations +``` + +After the program has run, two new files `oidv6-train-annotation_od.json` and `openimages_label_map.json` will be created in the `data/OpenImages/annotations` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── OpenImages +│ │ ├── annotations +| │ │ ├── oidv6-train-annotations-bbox.csv +| │ │ ├── class-descriptions-boxable.csv +| │ │ ├── oidv6-train-annotations_od.json +| │ │ ├── openimages_label_map.json +│ │ ├── OpenImages +│ │ │ ├── train +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 3 V3Det + +Referring to the data preparation section of the previously mentioned MM-GDINO-T pre-training data preparation and processing, the complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ | ├── v3det_2023_v1_train_od.json +│ │ | ├── v3det_2023_v1_label_map.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 4 LVIS 1.0 + +Please refer to the `2 LVIS 1.0` section of the later `Fine-tuning Dataset Preparation`. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 5 COCO2017 OD + +You can refer to the earlier section `MM-GDINO-T Pre-training Data Preparation and Processing` for data preparation. For convenience in subsequent processing, please create a symbolic link or move the downloaded [mdetr_annotations](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations) folder to the `data/coco` path. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +Due to some overlap between COCO2017 train and RefCOCO/RefCOCO+/RefCOCOg/gRefCOCO val, if not removed in advance, there will be data leakage when evaluating RefExp. + +```shell +python tools/dataset_converters/remove_cocotrain2017_from_refcoco.py data/coco/mdetr_annotations data/coco/annotations/instances_train2017.json +``` + +A new file `instances_train2017_norefval.json` will be created in the `data/coco/annotations` directory. Finally, use [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/coco2odvg.py data/coco/annotations/instances_train2017_norefval.json -d coco +``` + +Two new files `instances_train2017_norefval_od.json` and `coco_label_map.json` will be created in the `data/coco/annotations` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2017_norefval_od.json +│ │ │ ├── coco_label_map.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +Note: There are 15,000 images that overlap between the COCO2017 train and LVIS 1.0 val datasets. Therefore, if the COCO2017 train dataset is used in training, the evaluation results of LVIS 1.0 val will have a data leakage issue. However, LVIS 1.0 minival does not have this problem. + +### 6 GoldG + +Please refer to the section on `MM-GDINO-T Pre-training Data Preparation and Processing`. + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +| | ├── final_mixed_train_no_coco_vg.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 7 COCO2014 VG + +MDetr provides a Phrase Grounding version of the COCO2014 train annotations. The original annotation file is named `final_mixed_train.json`, and similar to the previous structure, the file structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_mixed_train.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +We can extract the COCO portion of the data from `final_mixed_train.json`. + +```shell +python tools/dataset_converters/extract_coco_from_mixed.py data/coco/mdetr_annotations/final_mixed_train.json +``` + +A new file named `final_mixed_train_only_coco.json` will be created in the `data/coco/mdetr_annotations` directory. Finally, use [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) to convert it into the ODVG format required for training: + +```shell +python tools/dataset_converters/goldg2odvg.py data/coco/mdetr_annotations/final_mixed_train_only_coco.json +``` + +A new file named `final_mixed_train_only_coco_vg.json` will be created in the `data/coco/mdetr_annotations` directory, with the complete structure as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_mixed_train.json +│ │ │ ├── final_mixed_train_only_coco.json +│ │ │ ├── final_mixed_train_only_coco_vg.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +Note: COCO2014 train and COCO2017 val do not have duplicate images, so there is no need to worry about data leakage issues in COCO evaluation. + +### 8 Referring Expression Comprehension + +There are a total of 4 datasets included. For data preparation, please refer to the `Fine-tuning Dataset Preparation` section. + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcoco_train_vg.json +│ │ │ ├── finetune_refcoco+_train_vg.json +│ │ │ ├── finetune_refcocog_train_vg.json +│ │ │ ├── finetune_grefcoco_train_vg.json +``` + +### 9 GRIT-20M + +Please refer to the `MM-GDINO-T Pre-training Data Preparation and Processing` section. + +## Preparation of Evaluation Dataset + +### 1 COCO 2017 + +The data preparation process is consistent with the previous descriptions, and the final structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 2 LVIS 1.0 + +The LVIS 1.0 val dataset includes both mini and full versions. The significance of the mini version is: + +1. The full LVIS val evaluation dataset is quite large, and conducting an evaluation with it can take a significant amount of time. +2. In the full LVIS val dataset, there are 15,000 images from the COCO2017 train dataset. If a user has used the COCO2017 data for training, there can be a data leakage issue when evaluating on the full LVIS val dataset + +The LVIS 1.0 dataset contains images that are exactly the same as the COCO2017 dataset, with the addition of new annotations. You can download the minival annotation file from [here](https://huggingface.co/GLIPModel/GLIP/blob/main/lvis_v1_minival_inserted_image_name.json), and the val 1.0 annotation file from [here](https://huggingface.co/GLIPModel/GLIP/blob/main/lvis_od_val.json). The final structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 3 ODinW + +ODinW, which stands for Object Detection in the Wild, is a dataset used to evaluate the generalization capability of grounding pre-trained models in different real-world scenarios. It consists of two subsets, ODinW13 and ODinW35, representing datasets composed of 13 and 35 different datasets, respectively. You can download it from [here](https://huggingface.co/GLIPModel/GLIP/tree/main/odinw_35), and then unzip each file. The final structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── odinw +│ │ ├── AerialMaritimeDrone +│ │ | |── large +│ │ | | ├── test +│ │ | | ├── train +│ │ | | ├── valid +│ │ | |── tiled +│ │ ├── AmericanSignLanguageLetters +│ │ ├── Aquarium +│ │ ├── BCCD +│ │ ├── ... +``` + +When evaluating ODinW35, custom prompts are required. Therefore, it's necessary to preprocess the annotated JSON files in advance. You can use the [override_category.py](./odinw/override_category.py) script for this purpose. After processing, it will generate new annotation files without overwriting the original ones. + +```shell +python configs/mm_grounding_dino/odinw/override_category.py data/odinw/ +``` + +### 4 DOD + +DOD stands for Described Object Detection, and it is introduced in the paper titled [Described Object Detection: Liberating Object Detection with Flexible Expressions](https://arxiv.org/abs/2307.12813). You can download the dataset from [here](https://github.com/shikras/d-cube?tab=readme-ov-file). The final structure of the dataset is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── d3 +│ │ ├── d3_images +│ │ ├── d3_json +│ │ ├── d3_pkl +``` + +### 5 Flickr30k Entities + +In the previous GoldG data preparation section, we downloaded the necessary files for training with Flickr30k. For evaluation, you will need 2 JSON files, which you can download from [here](https://huggingface.co/GLIPModel/GLIP/blob/main/mdetr_annotations/final_flickr_separateGT_val.json) and [here](https://huggingface.co/GLIPModel/GLIP/blob/main/mdetr_annotations/final_flickr_separateGT_test.json). The final structure of the dataset is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_val.json +│ │ ├── final_flickr_separateGT_test.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 6 Referring Expression Comprehension + +Referential Expression Comprehension includes 4 datasets: RefCOCO, RefCOCO+, RefCOCOg, and gRefCOCO. The images used in these 4 datasets are from COCO2014 train, similar to COCO2017. You can download the images from the official COCO website or opendatalab. The annotations can be directly downloaded from [here](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations). The mdetr_annotations folder contains a large number of annotations, so you can choose to download only the JSON files you need. The final structure of the dataset is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcocog_test.json +``` + +Please note that gRefCOCO is introduced in [GREC: Generalized Referring Expression Comprehension](https://arxiv.org/abs/2308.16182) and is not available in the `mdetr_annotations` folder. You will need to handle it separately. Here are the specific steps: + +1. Download [gRefCOCO](https://github.com/henghuiding/gRefCOCO?tab=readme-ov-file) and unzip it into the `data/coco/` folder. + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ ├── grefs +│ │ │ ├── grefs(unc).json +│ │ │ ├── instances.json +``` + +2. Convert to COCO format + +You can use the official [conversion script](https://github.com/henghuiding/gRefCOCO/blob/b4b1e55b4d3a41df26d6b7d843ea011d581127d4/mdetr/scripts/fine-tuning/grefexp_coco_format.py) provided by gRefCOCO. Please note that you need to uncomment line 161 and comment out line 160 in the script to obtain the full JSON file. + +```shell +# you need to clone the official repo +git clone https://github.com/henghuiding/gRefCOCO.git +cd gRefCOCO/mdetr +python scripts/fine-tuning/grefexp_coco_format.py --data_path ../../data/coco/grefs --out_path ../../data/coco/mdetr_annotations/ --coco_path ../../data/coco +``` + +Four JSON files will be generated in the `data/coco/mdetr_annotations/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_grefcoco_train.json +│ │ │ ├── finetune_grefcoco_val.json +│ │ │ ├── finetune_grefcoco_testA.json +│ │ │ ├── finetune_grefcoco_testB.json +``` + +## Fine-Tuning Dataset Preparation + +### 1 COCO 2017 + +COCO is the most commonly used dataset in the field of object detection, and we aim to explore its fine-tuning modes more comprehensively. From current developments, there are a total of three fine-tuning modes: + +1. Closed-set fine-tuning, where the description on the text side cannot be modified after fine-tuning, transforms into a closed-set algorithm. This approach maximizes performance on COCO but loses generality. +2. Open-set continued pretraining fine-tuning involves using pretraining methods consistent with the COCO dataset. There are two approaches to this: the first is to reduce the learning rate and fix certain modules, fine-tuning only on the COCO dataset; the second is to mix COCO data with some of the pre-trained data. The goal of both approaches is to improve performance on the COCO dataset as much as possible without compromising generalization. +3. Open-vocabulary fine-tuning involves adopting a common practice in the OVD (Open-Vocabulary Detection) domain. It divides COCO categories into base classes and novel classes. During training, fine-tuning is performed only on the base classes, while evaluation is conducted on both base and novel classes. This approach allows for the assessment of COCO OVD capabilities, with the goal of improving COCO dataset performance without compromising generalization as much as possible. + +\*\*(1) Closed-set Fine-tuning \*\* + +This section does not require data preparation; you can directly use the data you have prepared previously. + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +**(2) Open-set Continued Pretraining Fine-tuning** +To use this approach, you need to convert the COCO training data into ODVG format. You can use the following command for conversion: + +```shell +python tools/dataset_converters/coco2odvg.py data/coco/annotations/instances_train2017.json -d coco +``` + +This will generate new files, `instances_train2017_od.json` and `coco2017_label_map.json`, in the `data/coco/annotations/` directory. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_train2017_od.json +│ │ │ ├── coco2017_label_map.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +Once you have obtained the data, you can choose whether to perform individual pretraining or mixed pretraining. + +**(3) Open-vocabulary Fine-tuning** +For this approach, you need to convert the COCO training data into OVD (Open-Vocabulary Detection) format. You can use the following command for conversion: + +```shell +python tools/dataset_converters/coco2ovd.py data/coco/ +``` + +This will generate new files, `instances_val2017_all_2.json` and `instances_val2017_seen_2.json`, in the `data/coco/annotations/` directory. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_train2017_od.json +│ │ │ ├── instances_val2017_all_2.json +│ │ │ ├── instances_val2017_seen_2.json +│ │ │ ├── coco2017_label_map.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +You can then proceed to train and test directly using the [configuration](coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py). + +### 2 LVIS 1.0 + +LVIS is a dataset that includes 1,203 classes, making it a valuable dataset for fine-tuning. Due to its large number of classes, it's not feasible to perform closed-set fine-tuning. Therefore, we can only use open-set continued pretraining fine-tuning and open-vocabulary fine-tuning on LVIS. + +You need to prepare the LVIS training JSON files first, which you can download from [here](https://www.lvisdataset.org/dataset). We only need `lvis_v1_train.json` and `lvis_v1_val.json`. After downloading them, place them in the `data/coco/annotations/` directory, and then run the following command: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +(1) Open-set continued pretraining fine-tuning + +Convert to ODVG format using the following command: + +```shell +python tools/dataset_converters/lvis2odvg.py data/coco/annotations/lvis_v1_train.json +``` + +It will generate new files, `lvis_v1_train_od.json` and `lvis_v1_label_map.json`, in the `data/coco/annotations/` directory, and the complete dataset structure will look like this: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +You can directly use the provided [configuration](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py) for training and testing, or you can modify the configuration to mix it with some of the pretraining datasets as needed. + +**(2) Open Vocabulary Fine-tuning** + +Convert to OVD format using the following command: + +```shell +python tools/dataset_converters/lvis2ovd.py data/coco/ +``` + +New `lvis_v1_train_od_norare.json` and `lvis_v1_label_map_norare.json` will be generated under `data/coco/annotations/`, and the complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ │ ├── lvis_v1_train_od_norare.json +│ │ │ ├── lvis_v1_label_map_norare.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +然Then you can directly use the [configuration](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py) for training and testing. + +### 3 RTTS + +RTTS is a foggy weather dataset, which contains 4,322 foggy images, including five classes: bicycle, bus, car, motorbike, and person. It can be downloaded from [here](https://drive.google.com/file/d/15Ei1cHGVqR1mXFep43BO7nkHq1IEGh1e/view), and then extracted to the `data/RTTS/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── RTTS +│ │ ├── annotations_json +│ │ ├── annotations_xml +│ │ ├── ImageSets +│ │ ├── JPEGImages +``` + +### 4 RUOD + +RUOD is an underwater object detection dataset. You can download it from [here](https://drive.google.com/file/d/1hxtbdgfVveUm_DJk5QXkNLokSCTa_E5o/view), and then extract it to the `data/RUOD/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── RUOD +│ │ ├── Environment_pic +│ │ ├── Environmet_ANN +│ │ ├── RUOD_ANN +│ │ ├── RUOD_pic +``` + +### 5 Brain Tumor + +Brain Tumor is a 2D detection dataset in the medical field. You can download it from [here](https://universe.roboflow.com/roboflow-100/brain-tumor-m2pbp/dataset/2), please make sure to choose the `COCO JSON` format. Then extract it to the `data/brain_tumor_v2/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── brain_tumor_v2 +│ │ ├── test +│ │ ├── train +│ │ ├── valid +``` + +### 6 Cityscapes + +Cityscapes is an urban street scene dataset. You can download it from [here](https://www.cityscapes-dataset.com/) or from opendatalab, and then extract it to the `data/cityscapes/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── cityscapes +│ │ ├── annotations +│ │ ├── leftImg8bit +│ │ │ ├── train +│ │ │ ├── val +│ │ ├── gtFine +│ │ │ ├── train +│ │ │ ├── val +``` + +After downloading, you can use the [cityscapes.py](../../tools/dataset_converters/cityscapes.py) script to generate the required JSON format. + +```shell +python tools/dataset_converters/cityscapes.py data/cityscapes/ +``` + +Three new JSON files will be generated in the annotations directory. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── cityscapes +│ │ ├── annotations +│ │ │ ├── instancesonly_filtered_gtFine_train.json +│ │ │ ├── instancesonly_filtered_gtFine_val.json +│ │ │ ├── instancesonly_filtered_gtFine_test.json +│ │ ├── leftImg8bit +│ │ │ ├── train +│ │ │ ├── val +│ │ ├── gtFine +│ │ │ ├── train +│ │ │ ├── val +``` + +### 7 People in Painting + +People in Painting is an oil painting dataset that you can download from [here](https://universe.roboflow.com/roboflow-100/people-in-paintings/dataset/2). Please make sure to choose the `COCO JSON` format. After downloading, unzip the dataset to the `data/people_in_painting_v2/` folder. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── people_in_painting_v2 +│ │ ├── test +│ │ ├── train +│ │ ├── valid +``` + +### 8 Referring Expression Comprehension + +Fine-tuning for Referential Expression Comprehension is similar to what was described earlier and includes four datasets. The dataset preparation for evaluation has already been organized. The complete dataset structure is as follows: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcocog_test.json +``` + +Then we need to convert it to the required ODVG format. Please use the [refcoco2odvg.py](../../tools/dataset_converters/refcoco2odvg.py) script to perform the conversion. + +```shell +python tools/dataset_converters/refcoco2odvg.py data/coco/mdetr_annotations +``` + +The converted dataset structure will include 4 new JSON files in the `data/coco/mdetr_annotations` directory. Here is the structure of the converted dataset: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcoco_train_vg.json +│ │ │ ├── finetune_refcoco+_train_vg.json +│ │ │ ├── finetune_refcocog_train_vg.json +│ │ │ ├── finetune_grefcoco_train_vg.json +``` diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare_zh-CN.md b/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare_zh-CN.md new file mode 100644 index 0000000000000000000000000000000000000000..10520b02fe54cda845335b55ac5bc6fa8bfdac65 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/dataset_prepare_zh-CN.md @@ -0,0 +1,1194 @@ +# 数据准备和处理 + +## MM-GDINO-T 预训练数据准备和处理 + +MM-GDINO-T 模型中我们一共提供了 5 种不同数据组合的预训练配置,数据采用逐步累加的方式进行训练,因此用户可以根据自己的实际需求准备数据。 + +### 1 Objects365 v1 + +对应的训练配置为 [grounding_dino_swin-t_pretrain_obj365](./grounding_dino_swin-t_pretrain_obj365.py) + +Objects365_v1 可以从 [opendatalab](https://opendatalab.com/OpenDataLab/Objects365_v1) 下载,其提供了 CLI 和 SDK 两者下载方式。 + +下载并解压后,将其放置或者软链接到 `data/objects365v1` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v1 +│ │ ├── objects365_train.json +│ │ ├── objects365_val.json +│ │ ├── train +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── test +``` + +然后使用 [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/coco2odvg.py data/objects365v1/objects365_train.json -d o365v1 +``` + +程序运行完成后会在 `data/objects365v1` 目录下创建 `o365v1_train_od.json` 和 `o365v1_label_map.json` 两个新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v1 +│ │ ├── objects365_train.json +│ │ ├── objects365_val.json +│ │ ├── o365v1_train_od.json +│ │ ├── o365v1_label_map.json +│ │ ├── train +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── test +``` + +### 2 COCO 2017 + +上述配置在训练过程中会评估 COCO 2017 数据集的性能,因此需要准备 COCO 2017 数据集。你可以从 [COCO](https://cocodataset.org/) 官网下载或者从 [opendatalab](https://opendatalab.com/OpenDataLab/COCO_2017) 下载 + +下载并解压后,将其放置或者软链接到 `data/coco` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 3 GoldG + +下载该数据集后就可以训练 [grounding_dino_swin-t_pretrain_obj365_goldg](./grounding_dino_swin-t_pretrain_obj365_goldg.py) 配置了。 + +GoldG 数据集包括 `GQA` 和 `Flickr30k` 两个数据集,来自 GLIP 论文中提到的 MixedGrounding 数据集,其排除了 COCO 数据集。下载链接为 [mdetr_annotations](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations),我们目前需要的是 `mdetr_annotations/final_mixed_train_no_coco.json` 和 `mdetr_annotations/final_flickr_separateGT_train.json` 文件。 + +然后下载 [GQA images](https://nlp.stanford.edu/data/gqa/images.zip) 图片。下载并解压后,将其放置或者软链接到 `data/gqa` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +然后下载 [Flickr30k images](http://shannon.cs.illinois.edu/DenotationGraph/) 图片。这个数据下载需要先申请,再获得下载链接后才可以下载。下载并解压后,将其放置或者软链接到 `data/flickr30k_entities` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +对于 GQA 数据集,你需要使用 [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/goldg2odvg.py data/gqa/final_mixed_train_no_coco.json +``` + +程序运行完成后会在 `data/gqa` 目录下创建 `final_mixed_train_no_coco_vg.json` 新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +| | ├── final_mixed_train_no_coco_vg.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +对于 Flickr30k 数据集,你需要使用 [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/goldg2odvg.py data/flickr30k_entities/final_flickr_separateGT_train.json +``` + +程序运行完成后会在 `data/flickr30k_entities` 目录下创建 `final_flickr_separateGT_train_vg.json` 新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 4 GRIT-20M + +对应的训练配置为 [grounding_dino_swin-t_pretrain_obj365_goldg_grit9m](./grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py) + +GRIT数据集可以从 [GRIT](https://huggingface.co/datasets/zzliang/GRIT#download-image) 中使用 img2dataset 包下载,默认指令下载后数据集大小为 1.1T,下载和处理预估需要至少 2T 硬盘空间,可根据硬盘容量酌情下载。下载后原始格式为: + +```text +mmdetection +├── configs +├── data +│ ├── grit_raw +│ │ ├── 00000_stats.json +│ │ ├── 00000.parquet +│ │ ├── 00000.tar +│ │ ├── 00001_stats.json +│ │ ├── 00001.parquet +│ │ ├── 00001.tar +│ │ ├── ... +``` + +下载后需要对格式进行进一步处理: + +```shell +python tools/dataset_converters/grit_processing.py data/grit_raw data/grit_processed +``` + +处理后的格式为: + +```text +mmdetection +├── configs +├── data +│ ├── grit_processed +│ │ ├── annotations +│ │ │ ├── 00000.json +│ │ │ ├── 00001.json +│ │ │ ├── ... +│ │ ├── images +│ │ │ ├── 00000 +│ │ │ │ ├── 000000000.jpg +│ │ │ │ ├── 000000003.jpg +│ │ │ │ ├── 000000004.jpg +│ │ │ │ ├── ... +│ │ │ ├── 00001 +│ │ │ ├── ... +``` + +对于 GRIT 数据集,你需要使用 [grit2odvg.py](../../tools/dataset_converters/grit2odvg.py) 转化成需要的 ODVG 格式: + +```shell +python tools/dataset_converters/grit2odvg.py data/grit_processed/ +``` + +程序运行完成后会在 `data/grit_processed` 目录下创建 `grit20m_vg.json` 新文件,大概包含 9M 条数据,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── grit_processed +| | ├── grit20m_vg.json +│ │ ├── annotations +│ │ │ ├── 00000.json +│ │ │ ├── 00001.json +│ │ │ ├── ... +│ │ ├── images +│ │ │ ├── 00000 +│ │ │ │ ├── 000000000.jpg +│ │ │ │ ├── 000000003.jpg +│ │ │ │ ├── 000000004.jpg +│ │ │ │ ├── ... +│ │ │ ├── 00001 +│ │ │ ├── ... +``` + +### 5 V3Det + +对应的训练配置为 + +- [grounding_dino_swin-t_pretrain_obj365_goldg_v3det](./grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py) +- [grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det](./grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py) + +V3Det 数据集下载可以从 [opendatalab](https://opendatalab.com/V3Det/V3Det) 下载,下载并解压后,将其放置或者软链接到 `data/v3det` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +然后使用 [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/coco2odvg.py data/v3det/annotations/v3det_2023_v1_train.json -d v3det +``` + +程序运行完成后会在 `data/v3det/annotations` 目录下创建目录下创建 `v3det_2023_v1_train_od.json` 和 `v3det_2023_v1_label_map.json` 两个新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ | ├── v3det_2023_v1_train_od.json +│ │ | ├── v3det_2023_v1_label_map.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 6 数据切分和可视化 + +考虑到用户需要准备的数据集过多,不方便对图片和标注进行训练前确认,因此我们提供了一个数据切分和可视化的工具,可以将数据集切分为 tiny 版本,然后使用可视化脚本查看图片和标签正确性。 + +1. 切分数据集 + +脚本位于 [这里](../../tools/misc/split_odvg.py), 以 `Object365 v1` 为例,切分数据集的命令如下: + +```shell +python tools/misc/split_odvg.py data/object365_v1/ o365v1_train_od.json train your_output_dir --label-map-file o365v1_label_map.json -n 200 +``` + +上述脚本运行后会在 `your_output_dir` 目录下创建和 `data/object365_v1/` 一样的文件夹结构,但是只会保存 200 张训练图片和对应的 json,方便用户查看。 + +2. 可视化原始数据集 + +脚本位于 [这里](../../tools/analysis_tools/browse_grounding_raw.py), 以 `Object365 v1` 为例,可视化数据集的命令如下: + +```shell +python tools/analysis_tools/browse_grounding_raw.py data/object365_v1/ o365v1_train_od.json train --label-map-file o365v1_label_map.json -o your_output_dir --not-show +``` + +上述脚本运行后会在 `your_output_dir` 目录下生成同时包括图片和标签的图片,方便用户查看。 + +3. 可视化 dataset 输出的数据集 + +脚本位于 [这里](../../tools/analysis_tools/browse_grounding_dataset.py), 用户可以通过该脚本查看 dataset 输出的结果即包括了数据增强的结果。 以 `Object365 v1` 为例,可视化数据集的命令如下: + +```shell +python tools/analysis_tools/browse_grounding_dataset.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py -o your_output_dir --not-show +``` + +上述脚本运行后会在 `your_output_dir` 目录下生成同时包括图片和标签的图片,方便用户查看。 + +## MM-GDINO-L 预训练数据准备和处理 + +### 1 Object365 v2 + +Objects365_v2 可以从 [opendatalab](https://opendatalab.com/OpenDataLab/Objects365) 下载,其提供了 CLI 和 SDK 两者下载方式。 + +下载并解压后,将其放置或者软链接到 `data/objects365v2` 目录下,目录结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v2 +│ │ ├── annotations +│ │ │ ├── zhiyuan_objv2_train.json +│ │ ├── train +│ │ │ ├── patch0 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +由于 objects365v2 类别中有部分类名是错误的,因此需要先进行修正。 + +```shell +python tools/dataset_converters/fix_o365_names.py +``` + +会在 `data/objects365v2/annotations` 下生成新的标注文件 `zhiyuan_objv2_train_fixname.json`。 + +然后使用 [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/coco2odvg.py data/objects365v2/annotations/zhiyuan_objv2_train_fixname.json -d o365v2 +``` + +程序运行完成后会在 `data/objects365v2` 目录下创建 `zhiyuan_objv2_train_fixname_od.json` 和 `o365v2_label_map.json` 两个新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── objects365v2 +│ │ ├── annotations +│ │ │ ├── zhiyuan_objv2_train.json +│ │ │ ├── zhiyuan_objv2_train_fixname.json +│ │ │ ├── zhiyuan_objv2_train_fixname_od.json +│ │ │ ├── o365v2_label_map.json +│ │ ├── train +│ │ │ ├── patch0 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 2 OpenImages v6 + +OpenImages v6 可以从 [官网](https://storage.googleapis.com/openimages/web/download_v6.html) 下载,由于数据集比较大,需要花费一定的时间,下载完成后文件结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── OpenImages +│ │ ├── annotations +| │ │ ├── oidv6-train-annotations-bbox.csv +| │ │ ├── class-descriptions-boxable.csv +│ │ ├── OpenImages +│ │ │ ├── train +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +然后使用 [openimages2odvg.py](../../tools/dataset_converters/openimages2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/openimages2odvg.py data/OpenImages/annotations +``` + +程序运行完成后会在 `data/OpenImages/annotations` 目录下创建 `oidv6-train-annotation_od.json` 和 `openimages_label_map.json` 两个新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── OpenImages +│ │ ├── annotations +| │ │ ├── oidv6-train-annotations-bbox.csv +| │ │ ├── class-descriptions-boxable.csv +| │ │ ├── oidv6-train-annotations_od.json +| │ │ ├── openimages_label_map.json +│ │ ├── OpenImages +│ │ │ ├── train +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 3 V3Det + +参见前面的 MM-GDINO-T 预训练数据准备和处理 数据准备部分,完整数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── v3det +│ │ ├── annotations +│ │ | ├── v3det_2023_v1_train.json +│ │ | ├── v3det_2023_v1_train_od.json +│ │ | ├── v3det_2023_v1_label_map.json +│ │ ├── images +│ │ │ ├── a00000066 +│ │ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 4 LVIS 1.0 + +参见后面的 `微调数据集准备` 的 `2 LVIS 1.0` 部分。完整数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 5 COCO2017 OD + +数据准备可以参考前面的 `MM-GDINO-T 预训练数据准备和处理` 部分。为了方便后续处理,请将下载的 [mdetr_annotations](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations) 文件夹软链接或者移动到 `data/coco` 路径下 +完整数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +由于 COCO2017 train 和 RefCOCO/RefCOCO+/RefCOCOg/gRefCOCO val 中存在部分重叠,如果不提前移除,在评测 RefExp 时候会存在数据泄露。 + +```shell +python tools/dataset_converters/remove_cocotrain2017_from_refcoco.py data/coco/mdetr_annotations data/coco/annotations/instances_train2017.json +``` + +会在 `data/coco/annotations` 目录下创建 `instances_train2017_norefval.json` 新文件。最后使用 [coco2odvg.py](../../tools/dataset_converters/coco2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/coco2odvg.py data/coco/annotations/instances_train2017_norefval.json -d coco +``` + +会在 `data/coco/annotations` 目录下创建 `instances_train2017_norefval_od.json` 和 `coco_label_map.json` 两个新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2017_norefval_od.json +│ │ │ ├── coco_label_map.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +注意: COCO2017 train 和 LVIS 1.0 val 数据集有 15000 张图片重复,因此一旦在训练中使用了 COCO2017 train,那么 LVIS 1.0 val 的评测结果就存在数据泄露问题,LVIS 1.0 minival 没有这个问题。 + +### 6 GoldG + +参见 MM-GDINO-T 预训练数据准备和处理 部分 + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ ├── gqa +| | ├── final_mixed_train_no_coco.json +| | ├── final_mixed_train_no_coco_vg.json +│ │ ├── images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 7 COCO2014 VG + +MDetr 中提供了 COCO2014 train 的 Phrase Grounding 版本标注, 最原始标注文件为 `final_mixed_train.json`,和之前类似,文件结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_mixed_train.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +我们可以从 `final_mixed_train.json` 中提取出 COCO 部分数据 + +```shell +python tools/dataset_converters/extract_coco_from_mixed.py data/coco/mdetr_annotations/final_mixed_train.json +``` + +会在 `data/coco/mdetr_annotations` 目录下创建 `final_mixed_train_only_coco.json` 新文件,最后使用 [goldg2odvg.py](../../tools/dataset_converters/goldg2odvg.py) 转换为训练所需的 ODVG 格式: + +```shell +python tools/dataset_converters/goldg2odvg.py data/coco/mdetr_annotations/final_mixed_train_only_coco.json +``` + +会在 `data/coco/mdetr_annotations` 目录下创建 `final_mixed_train_only_coco_vg.json` 新文件,完整结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── mdetr_annotations +│ │ │ ├── final_mixed_train.json +│ │ │ ├── final_mixed_train_only_coco.json +│ │ │ ├── final_mixed_train_only_coco_vg.json +│ │ │ ├── ... +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +注意: COCO2014 train 和 COCO2017 val 没有重复图片,因此不用担心 COCO 评测的数据泄露问题。 + +### 8 Referring Expression Comprehension + +其一共包括 4 个数据集。数据准备部分请参见 微调数据集准备 部分。 + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcoco_train_vg.json +│ │ │ ├── finetune_refcoco+_train_vg.json +│ │ │ ├── finetune_refcocog_train_vg.json +│ │ │ ├── finetune_grefcoco_train_vg.json +``` + +### 9 GRIT-20M + +参见 MM-GDINO-T 预训练数据准备和处理 部分 + +## 评测数据集准备 + +### 1 COCO 2017 + +数据准备流程和前面描述一致,最终结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 2 LVIS 1.0 + +LVIS 1.0 val 数据集包括 mini 和全量两个版本,mini 版本存在的意义是: + +1. LVIS val 全量评测数据集比较大,评测一次需要比较久的时间 +2. LVIS val 全量数据集中包括了 15000 张 COCO2017 train, 如果用户使用了 COCO2017 数据进行训练,那么将存在数据泄露问题 + +LVIS 1.0 图片和 COCO2017 数据集图片完全一样,只是提供了新的标注而已,minival 标注文件可以从 [这里](https://huggingface.co/GLIPModel/GLIP/blob/main/lvis_v1_minival_inserted_image_name.json)下载, val 1.0 标注文件可以从 [这里](https://huggingface.co/GLIPModel/GLIP/blob/main/lvis_od_val.json) 下载。 最终结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +### 3 ODinW + +ODinw 全称为 Object Detection in the Wild,是用于验证 grounding 预训练模型在不同实际场景中的泛化能力的数据集,其包括两个子集,分别是 ODinW13 和 ODinW35,代表是由 13 和 35 个数据集组成的。你可以从 [这里](https://huggingface.co/GLIPModel/GLIP/tree/main/odinw_35)下载,然后对每个文件进行解压,最终结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── odinw +│ │ ├── AerialMaritimeDrone +│ │ | |── large +│ │ | | ├── test +│ │ | | ├── train +│ │ | | ├── valid +│ │ | |── tiled +│ │ ├── AmericanSignLanguageLetters +│ │ ├── Aquarium +│ │ ├── BCCD +│ │ ├── ... +``` + +在评测 ODinW3535 时候由于需要自定义 prompt,因此需要提前对标注的 json 文件进行处理,你可以使用 [override_category.py](./odinw/override_category.py) 脚本进行处理,处理后会生成新的标注文件,不会覆盖原先的标注文件。 + +```shell +python configs/mm_grounding_dino/odinw/override_category.py data/odinw/ +``` + +### 4 DOD + +DOD 来自 [Described Object Detection: Liberating Object Detection with Flexible Expressions](https://arxiv.org/abs/2307.12813)。其数据集可以从 [这里](https://github.com/shikras/d-cube?tab=readme-ov-file#download)下载,最终的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── d3 +│ │ ├── d3_images +│ │ ├── d3_json +│ │ ├── d3_pkl +``` + +### 5 Flickr30k Entities + +在前面 GoldG 数据准备章节中我们已经下载了 Flickr30k 训练所需文件,评估所需的文件是 2 个 json 文件,你可以从 [这里](https://huggingface.co/GLIPModel/GLIP/blob/main/mdetr_annotations/final_flickr_separateGT_val.json) 和 [这里](https://huggingface.co/GLIPModel/GLIP/blob/main/mdetr_annotations/final_flickr_separateGT_test.json)下载,最终的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── flickr30k_entities +│ │ ├── final_flickr_separateGT_train.json +│ │ ├── final_flickr_separateGT_val.json +│ │ ├── final_flickr_separateGT_test.json +│ │ ├── final_flickr_separateGT_train_vg.json +│ │ ├── flickr30k_images +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +``` + +### 6 Referring Expression Comprehension + +指代性表达式理解包括 4 个数据集: RefCOCO, RefCOCO+, RefCOCOg, gRefCOCO。这 4 个数据集所采用的图片都来自于 COCO2014 train,和 COCO2017 类似,你可以从 COCO 官方或者 opendatalab 中下载,而标注可以直接从 [这里](https://huggingface.co/GLIPModel/GLIP/tree/main/mdetr_annotations) 下载,mdetr_annotations 文件夹里面包括了其他大量的标注,你如果觉得数量过多,可以只下载所需要的几个 json 文件即可。最终的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcocog_test.json +``` + +注意 gRefCOCO 是在 [GREC: Generalized Referring Expression Comprehension](https://arxiv.org/abs/2308.16182) 被提出,并不在 `mdetr_annotations` 文件夹中,需要自行处理。具体步骤为: + +1. 下载 [gRefCOCO](https://github.com/henghuiding/gRefCOCO?tab=readme-ov-file#grefcoco-dataset-download),并解压到 data/coco/ 文件夹中 + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ ├── grefs +│ │ │ ├── grefs(unc).json +│ │ │ ├── instances.json +``` + +2. 转换为 coco 格式 + +你可以使用 gRefCOCO 官方提供的[转换脚本](https://github.com/henghuiding/gRefCOCO/blob/b4b1e55b4d3a41df26d6b7d843ea011d581127d4/mdetr/scripts/fine-tuning/grefexp_coco_format.py)。注意需要将被注释的 161 行打开,并注释 160 行才可以得到全量的 json 文件。 + +```shell +# 需要克隆官方 repo +git clone https://github.com/henghuiding/gRefCOCO.git +cd gRefCOCO/mdetr +python scripts/fine-tuning/grefexp_coco_format.py --data_path ../../data/coco/grefs --out_path ../../data/coco/mdetr_annotations/ --coco_path ../../data/coco +``` + +会在 `data/coco/mdetr_annotations/` 文件夹中生成 4 个 json 文件,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_grefcoco_train.json +│ │ │ ├── finetune_grefcoco_val.json +│ │ │ ├── finetune_grefcoco_testA.json +│ │ │ ├── finetune_grefcoco_testB.json +``` + +## 微调数据集准备 + +### 1 COCO 2017 + +COCO 是检测领域最常用的数据集,我们希望能够更充分探索其微调模式。从目前发展来看,一共有 3 种微调方式: + +1. 闭集微调,即微调后文本端将无法修改描述,转变为闭集算法,在 COCO 上性能能够最大化,但是失去了通用性。 +2. 开集继续预训练微调,即对 COCO 数据集采用和预训练一致的预训练手段。此时有两种做法,第一种是降低学习率并固定某些模块,仅仅在 COCO 数据上预训练,第二种是将 COCO 数据和部分预训练数据混合一起训练,两种方式的目的都是在尽可能不降低泛化性时提高 COCO 数据集性能 +3. 开放词汇微调,即采用 OVD 领域常用做法,将 COCO 类别分成 base 类和 novel 类,训练时候仅仅在 base 类上进行,评测在 base 和 novel 类上进行。这种方式可以验证 COCO OVD 能力,目的也是在尽可能不降低泛化性时提高 COCO 数据集性能 + +**(1) 闭集微调** + +这个部分无需准备数据,直接用之前的数据即可。 + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +**(2) 开集继续预训练微调** +这种方式需要将 COCO 训练数据转换为 ODVG 格式,你可以使用如下命令转换: + +```shell +python tools/dataset_converters/coco2odvg.py data/coco/annotations/instances_train2017.json -d coco +``` + +会在 `data/coco/annotations/` 下生成新的 `instances_train2017_od.json` 和 `coco2017_label_map.json`,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_train2017_od.json +│ │ │ ├── coco2017_label_map.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +在得到数据后,你可以自行选择单独预习还是混合预训练方式。 + +**(3) 开放词汇微调** +这种方式需要将 COCO 训练数据转换为 OVD 格式,你可以使用如下命令转换: + +```shell +python tools/dataset_converters/coco2ovd.py data/coco/ +``` + +会在 `data/coco/annotations/` 下生成新的 `instances_val2017_all_2.json` 和 `instances_val2017_seen_2.json`,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_train2017_od.json +│ │ │ ├── instances_val2017_all_2.json +│ │ │ ├── instances_val2017_seen_2.json +│ │ │ ├── coco2017_label_map.json +│ │ │ ├── instances_val2017.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +然后可以直接使用 [配置](coco/grounding_dino_swin-t_finetune_16xb4_1x_coco_48_17.py) 进行训练和测试。 + +### 2 LVIS 1.0 + +LVIS 是一个包括 1203 类的数据集,同时也是一个长尾联邦数据集,对其进行微调很有意义。 由于其类别过多,我们无法对其进行闭集微调,因此只能采用开集继续预训练微调和开放词汇微调。 + +你需要先准备好 LVIS 训练 JSON 文件,你可以从 [这里](https://www.lvisdataset.org/dataset) 下载,我们只需要 `lvis_v1_train.json` 和 `lvis_v1_val.json`,然后将其放到 `data/coco/annotations/` 下,然后运行如下命令: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +(1) 开集继续预训练微调 + +使用如下命令转换为 ODVG 格式: + +```shell +python tools/dataset_converters/lvis2odvg.py data/coco/annotations/lvis_v1_train.json +``` + +会在 `data/coco/annotations/` 下生成新的 `lvis_v1_train_od.json` 和 `lvis_v1_label_map.json`,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +然后可以直接使用 [配置](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py) 进行训练测试,或者你修改配置将其和部分预训练数据集混合使用。 + +**(2) 开放词汇微调** + +使用如下命令转换为 OVD 格式: + +```shell +python tools/dataset_converters/lvis2ovd.py data/coco/ +``` + +会在 `data/coco/annotations/` 下生成新的 `lvis_v1_train_od_norare.json` 和 `lvis_v1_label_map_norare.json`,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── lvis_v1_train.json +│ │ │ ├── lvis_v1_val.json +│ │ │ ├── lvis_v1_train_od.json +│ │ │ ├── lvis_v1_label_map.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── lvis_v1_minival_inserted_image_name.json +│ │ │ ├── lvis_od_val.json +│ │ │ ├── lvis_v1_train_od_norare.json +│ │ │ ├── lvis_v1_label_map_norare.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +``` + +然后可以直接使用 [配置](lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py) 进行训练测试 + +### 3 RTTS + +RTTS 是一个浓雾天气数据集,该数据集包含 4,322 张雾天图像,包含五个类:自行车 (bicycle)、公共汽车 (bus)、汽车 (car)、摩托车 (motorbike) 和人 (person)。可以从 [这里](https://drive.google.com/file/d/15Ei1cHGVqR1mXFep43BO7nkHq1IEGh1e/view)下载, 然后解压到 `data/RTTS/` 文件夹中。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── RTTS +│ │ ├── annotations_json +│ │ ├── annotations_xml +│ │ ├── ImageSets +│ │ ├── JPEGImages +``` + +### 4 RUOD + +RUOD 是一个水下目标检测数据集,你可以从 [这里](https://drive.google.com/file/d/1hxtbdgfVveUm_DJk5QXkNLokSCTa_E5o/view)下载, 然后解压到 `data/RUOD/` 文件夹中。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── RUOD +│ │ ├── Environment_pic +│ │ ├── Environmet_ANN +│ │ ├── RUOD_ANN +│ │ ├── RUOD_pic +``` + +### 5 Brain Tumor + +Brain Tumor 是一个医学领域的 2d 检测数据集,你可以从 [这里](https://universe.roboflow.com/roboflow-100/brain-tumor-m2pbp/dataset/2)下载, 请注意选择 `COCO JSON` 格式。然后解压到 `data/brain_tumor_v2/` 文件夹中。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── brain_tumor_v2 +│ │ ├── test +│ │ ├── train +│ │ ├── valid +``` + +### 6 Cityscapes + +Cityscapes 是一个城市街景数据集,你可以从 [这里](https://www.cityscapes-dataset.com/) 或者 opendatalab 中下载, 然后解压到 `data/cityscapes/` 文件夹中。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── cityscapes +│ │ ├── annotations +│ │ ├── leftImg8bit +│ │ │ ├── train +│ │ │ ├── val +│ │ ├── gtFine +│ │ │ ├── train +│ │ │ ├── val +``` + +在下载后,然后使用 [cityscapes.py](../../tools/dataset_converters/cityscapes.py) 脚本生成我们所需要的 json 格式 + +```shell +python tools/dataset_converters/cityscapes.py data/cityscapes/ +``` + +会在 annotations 中生成 3 个新的 json 文件。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── cityscapes +│ │ ├── annotations +│ │ │ ├── instancesonly_filtered_gtFine_train.json +│ │ │ ├── instancesonly_filtered_gtFine_val.json +│ │ │ ├── instancesonly_filtered_gtFine_test.json +│ │ ├── leftImg8bit +│ │ │ ├── train +│ │ │ ├── val +│ │ ├── gtFine +│ │ │ ├── train +│ │ │ ├── val +``` + +### 7 People in Painting + +People in Painting 是一个油画数据集,你可以从 [这里](https://universe.roboflow.com/roboflow-100/people-in-paintings/dataset/2), 请注意选择 `COCO JSON` 格式。然后解压到 `data/people_in_painting_v2/` 文件夹中。完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── people_in_painting_v2 +│ │ ├── test +│ │ ├── train +│ │ ├── valid +``` + +### 8 Referring Expression Comprehension + +指代性表达式理解的微调和前面一样,也是包括 4 个数据集,在评测数据准备阶段已经全部整理好了,完整的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcocog_test.json +``` + +然后我们需要将其转换为所需的 ODVG 格式,请使用 [refcoco2odvg.py](../../tools/dataset_converters/refcoco2odvg.py) 脚本转换, + +```shell +python tools/dataset_converters/refcoco2odvg.py data/coco/mdetr_annotations +``` + +会在 `data/coco/mdetr_annotations` 中生成新的 4 个 json 文件。 转换后的数据集结构如下: + +```text +mmdetection +├── configs +├── data +│ ├── coco +│ │ ├── annotations +│ │ │ ├── instances_train2017.json +│ │ │ ├── instances_val2017.json +│ │ │ ├── instances_train2014.json +│ │ ├── train2017 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── val2017 +│ │ │ ├── xxxx.jpg +│ │ │ ├── ... +│ │ ├── train2014 +│ │ │ ├── xxx.jpg +│ │ │ ├── ... +│ │ ├── mdetr_annotations +│ │ │ ├── final_refexp_val.json +│ │ │ ├── finetune_refcoco_testA.json +│ │ │ ├── finetune_refcoco_testB.json +│ │ │ ├── finetune_refcoco+_testA.json +│ │ │ ├── finetune_refcoco+_testB.json +│ │ │ ├── finetune_refcocog_test.json +│ │ │ ├── finetune_refcoco_train_vg.json +│ │ │ ├── finetune_refcoco+_train_vg.json +│ │ │ ├── finetune_refcocog_train_vg.json +│ │ │ ├── finetune_grefcoco_train_vg.json +``` diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py new file mode 100644 index 0000000000000000000000000000000000000000..e59a0a52518aa125d556aab12f8076a95f39ec22 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py @@ -0,0 +1,78 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/d3/' + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', 'sent_ids')) +] + +# -------------------------------------------------# +val_dataset_full = dict( + type='DODDataset', + data_root=data_root, + ann_file='d3_json/d3_full_annotations.json', + data_prefix=dict(img='d3_images/', anno='d3_pkl'), + pipeline=test_pipeline, + test_mode=True, + backend_args=None, + return_classes=True) + +val_evaluator_full = dict( + type='DODCocoMetric', + ann_file=data_root + 'd3_json/d3_full_annotations.json') + +# -------------------------------------------------# +val_dataset_pres = dict( + type='DODDataset', + data_root=data_root, + ann_file='d3_json/d3_pres_annotations.json', + data_prefix=dict(img='d3_images/', anno='d3_pkl'), + pipeline=test_pipeline, + test_mode=True, + backend_args=None, + return_classes=True) +val_evaluator_pres = dict( + type='DODCocoMetric', + ann_file=data_root + 'd3_json/d3_pres_annotations.json') + +# -------------------------------------------------# +val_dataset_abs = dict( + type='DODDataset', + data_root=data_root, + ann_file='d3_json/d3_abs_annotations.json', + data_prefix=dict(img='d3_images/', anno='d3_pkl'), + pipeline=test_pipeline, + test_mode=True, + backend_args=None, + return_classes=True) +val_evaluator_abs = dict( + type='DODCocoMetric', + ann_file=data_root + 'd3_json/d3_abs_annotations.json') + +# -------------------------------------------------# +datasets = [val_dataset_full, val_dataset_pres, val_dataset_abs] +dataset_prefixes = ['FULL', 'PRES', 'ABS'] +metrics = [val_evaluator_full, val_evaluator_pres, val_evaluator_abs] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py new file mode 100644 index 0000000000000000000000000000000000000000..3d680091162e5ac96c15c76b58a18764e85d3233 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/dod/grounding_dino_swin-t_pretrain_zeroshot_parallel_dod.py @@ -0,0 +1,3 @@ +_base_ = 'grounding_dino_swin-t_pretrain_zeroshot_concat_dod.py' + +model = dict(test_cfg=dict(chunked_size=1)) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_flickr30k.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_flickr30k.py new file mode 100644 index 0000000000000000000000000000000000000000..e9eb783da97a6d665002cc9192f740010282870e --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/flickr30k/grounding_dino_swin-t-pretrain_flickr30k.py @@ -0,0 +1,57 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +dataset_type = 'Flickr30kDataset' +data_root = 'data/flickr30k_entities/' + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive', 'phrase_ids', 'phrases')) +] + +dataset_Flickr30k_val = dict( + type=dataset_type, + data_root=data_root, + ann_file='final_flickr_separateGT_val.json', + data_prefix=dict(img='flickr30k_images/'), + pipeline=test_pipeline, +) + +dataset_Flickr30k_test = dict( + type=dataset_type, + data_root=data_root, + ann_file='final_flickr_separateGT_test.json', + data_prefix=dict(img='flickr30k_images/'), + pipeline=test_pipeline, +) + +val_evaluator_Flickr30k = dict(type='Flickr30kMetric') + +test_evaluator_Flickr30k = dict(type='Flickr30kMetric') + +# ----------Config---------- # +dataset_prefixes = ['Flickr30kVal', 'Flickr30kTest'] +datasets = [dataset_Flickr30k_val, dataset_Flickr30k_test] +metrics = [val_evaluator_Flickr30k, test_evaluator_Flickr30k] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_all.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_all.py new file mode 100644 index 0000000000000000000000000000000000000000..eff58bba6b192fe43e62cb1e3ae40a546e1a3ddf --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_all.py @@ -0,0 +1,335 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det/grounding_dino_swin-b_pretrain_obj365_goldg_v3de-f83eef00.pth' # noqa + +model = dict( + use_autocast=True, + backbone=dict( + _delete_=True, + type='SwinTransformer', + pretrain_img_size=384, + embed_dims=128, + depths=[2, 2, 18, 2], + num_heads=[4, 8, 16, 32], + window_size=12, + mlp_ratio=4, + qkv_bias=True, + qk_scale=None, + drop_rate=0., + attn_drop_rate=0., + drop_path_rate=0.3, + patch_norm=True, + out_indices=(1, 2, 3), + with_cp=True, + convert_weights=True, + frozen_stages=-1, + init_cfg=None), + neck=dict(in_channels=[256, 512, 1024]), +) + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +v3d_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/V3Det/annotations/v3det_2023_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +v3det_dataset = dict( + type='ODVGDataset', + data_root='data/V3Det/', + ann_file='annotations/v3det_2023_v1_train_od.json', + label_map_file='annotations/v3det_2023_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=v3d_train_pipeline, + return_classes=True, + backend_args=None) + +grit_dataset = dict( + type='ODVGDataset', + data_root='grit_processed/', + ann_file='grit20m_vg.json', + label_map_file=None, + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- lvis od dataset--------------------------- +lvis_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/coco/annotations/lvis_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +lvis_dataset = dict( + type='ClassBalancedDataset', + oversample_thr=1e-3, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='annotations/lvis_v1_train_od.json', + label_map_file='annotations/lvis_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=lvis_train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- coco2017 od dataset--------------------------- +coco2017_train_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='annotations/instance_train2017_norefval_od.json', + label_map_file='annotations/coco2017_label_map.json', + data_prefix=dict(img='train2017'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- coco2014 vg dataset--------------------------- +coco2014_vg_dataset = dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/final_mixed_train_only_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- refcoco vg dataset--------------------------- +refcoco_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcoco_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- refcoco+ vg dataset--------------------------- +refcoco_plus_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcoco+_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- refcocog vg dataset--------------------------- +refcocog_dataset = dict( + type='RepeatDataset', + times=3, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcocog_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- grefcoco vg dataset--------------------------- +grefcoco_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_grefcoco_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- dataloader--------------------------- +train_dataloader = dict( + batch_size=4, + num_workers=4, + sampler=dict( + _delete_=True, + type='CustomSampleSizeSampler', + ratio_mode=True, + dataset_size=[-1, -1, 0.07, -1, -1, -1, -1, -1, -1, -1, -1, -1]), + dataset=dict(datasets=[ + o365v1_od_dataset, # 1.74M + v3det_dataset, # + grit_dataset, + lvis_dataset, + coco2017_train_dataset, # 0.12M + flickr30k_dataset, # 0.15M + gqa_dataset, # 0.62M + coco2014_vg_dataset, # 0.49M + refcoco_dataset, # 0.12M + refcoco_plus_dataset, # 0.12M + refcocog_dataset, # 0.08M + grefcoco_dataset, # 0.19M + ])) + +optim_wrapper = dict(optimizer=dict(lr=0.0001)) + +# learning policy +max_iter = 304680 +train_cfg = dict( + _delete_=True, + type='IterBasedTrainLoop', + max_iters=max_iter, + val_interval=10000) + +param_scheduler = [ + dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_iter, + by_epoch=False, + milestones=[228510], + gamma=0.1) +] + +default_hooks = dict( + checkpoint=dict(by_epoch=False, interval=10000, max_keep_ckpts=20)) +log_processor = dict(by_epoch=False) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det.py new file mode 100644 index 0000000000000000000000000000000000000000..743d02cffbe9c38977edad2bce8a53bd6a8594af --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det.py @@ -0,0 +1,143 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window12_384_22k.pth' # noqa +model = dict( + use_autocast=True, + backbone=dict( + _delete_=True, + type='SwinTransformer', + pretrain_img_size=384, + embed_dims=128, + depths=[2, 2, 18, 2], + num_heads=[4, 8, 16, 32], + window_size=12, + mlp_ratio=4, + qkv_bias=True, + qk_scale=None, + drop_rate=0., + attn_drop_rate=0., + drop_path_rate=0.3, + patch_norm=True, + out_indices=(1, 2, 3), + with_cp=True, + convert_weights=True, + frozen_stages=-1, + init_cfg=dict(type='Pretrained', checkpoint=pretrained)), + neck=dict(in_channels=[256, 512, 1024]), +) + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +v3d_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/V3Det/annotations/v3det_2023_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +v3det_dataset = dict( + type='ODVGDataset', + data_root='data/V3Det/', + ann_file='annotations/v3det_2023_v1_train_od.json', + label_map_file='annotations/v3det_2023_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=v3d_train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + dataset=dict(datasets=[ + o365v1_od_dataset, flickr30k_dataset, gqa_dataset, v3det_dataset + ])) + +# learning policy +max_epochs = 18 +param_scheduler = [ + dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[13, 16], + gamma=0.1) +] + +train_cfg = dict( + type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_all.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_all.py new file mode 100644 index 0000000000000000000000000000000000000000..a17f2344e14d8af81bd267d8bd47662f7e6e059d --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_all.py @@ -0,0 +1,540 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg/grounding_dino_swin-l_pretrain_obj365_goldg-34dcdc53.pth' # noqa + +num_levels = 5 +model = dict( + use_autocast=True, + num_feature_levels=num_levels, + backbone=dict( + _delete_=True, + type='SwinTransformer', + pretrain_img_size=384, + embed_dims=192, + depths=[2, 2, 18, 2], + num_heads=[6, 12, 24, 48], + window_size=12, + mlp_ratio=4, + qkv_bias=True, + qk_scale=None, + drop_rate=0., + attn_drop_rate=0., + drop_path_rate=0.2, + patch_norm=True, + out_indices=(0, 1, 2, 3), + # Please only add indices that would be used + # in FPN, otherwise some parameter will not be used + with_cp=True, + convert_weights=True, + frozen_stages=-1, + init_cfg=None), + neck=dict(in_channels=[192, 384, 768, 1536], num_outs=num_levels), + encoder=dict(layer_cfg=dict(self_attn_cfg=dict(num_levels=num_levels))), + decoder=dict(layer_cfg=dict(cross_attn_cfg=dict(num_levels=num_levels)))) + +# --------------------------- object365v2 od dataset--------------------------- +# objv2_backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# './data/objects365v2/': 'yudong:s3://wangyudong/obj365_v2/', +# 'data/objects365v2/': 'yudong:s3://wangyudong/obj365_v2/' +# })) +objv2_backend_args = None + +objv2_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=objv2_backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/objects365v2/annotations/o365v2_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +o365v2_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v2/', + ann_file='annotations/zhiyuan_objv2_train_od.json', + label_map_file='annotations/o365v2_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=objv2_train_pipeline, + return_classes=True, + need_text=False, + backend_args=None, +) + +# --------------------------- openimagev6 od dataset--------------------------- +# oi_backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# './data/': 's3://openmmlab/datasets/detection/', +# 'data/': 's3://openmmlab/datasets/detection/' +# })) +oi_backend_args = None + +oi_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=oi_backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/OpenImages/annotations/openimages_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +oiv6_dataset = dict( + type='ODVGDataset', + data_root='data/OpenImages/', + ann_file='annotations/oidv6-train-annotations_od.json', + label_map_file='annotations/openimages_label_map.json', + data_prefix=dict(img='OpenImages/train/'), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, + pipeline=oi_train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- v3det od dataset--------------------------- +v3d_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/V3Det/annotations/v3det_2023_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +v3det_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/V3Det/', + ann_file='annotations/v3det_2023_v1_train_od.json', + label_map_file='annotations/v3det_2023_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, + pipeline=v3d_train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- lvis od dataset--------------------------- +lvis_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/coco/annotations/lvis_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +lvis_dataset = dict( + type='ClassBalancedDataset', + oversample_thr=1e-3, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='annotations/lvis_v1_train_od.json', + label_map_file='annotations/lvis_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=lvis_train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- coco2017 od dataset--------------------------- +coco2017_train_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='annotations/instance_train2017_norefval_od.json', + label_map_file='annotations/coco2017_label_map.json', + data_prefix=dict(img='train2017'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- flickr30k vg dataset--------------------------- +flickr30k_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- gqa vg dataset--------------------------- +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- coco2014 vg dataset--------------------------- +coco2014_vg_dataset = dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/final_mixed_train_only_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- refcoco vg dataset--------------------------- +refcoco_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcoco_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- refcoco+ vg dataset--------------------------- +refcoco_plus_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcoco+_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- refcocog vg dataset--------------------------- +refcocog_dataset = dict( + type='RepeatDataset', + times=3, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_refcocog_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- grefcoco vg dataset--------------------------- +grefcoco_dataset = dict( + type='RepeatDataset', + times=2, + dataset=dict( + type='ODVGDataset', + data_root='data/coco/', + ann_file='mdetr_annotations/finetune_grefcoco_train_vg.json', + label_map_file=None, + data_prefix=dict(img='train2014'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None)) + +# --------------------------- grit vg dataset--------------------------- +# grit_backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# './data/grit/': 'yichen:s3://chenyicheng/grit/', +# 'data/grit/': 'yichen:s3://chenyicheng/grit/' +# })) +grit_backend_args = None + +grit_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=grit_backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +grit_dataset = dict( + type='ODVGDataset', + data_root='data/grit/', + ann_file='grit20m_vg.json', + label_map_file=None, + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + pipeline=grit_train_pipeline, + return_classes=True, + backend_args=None) + +# --------------------------- dataloader--------------------------- +train_dataloader = dict( + batch_size=4, + num_workers=4, + sampler=dict( + _delete_=True, + type='CustomSampleSizeSampler', + ratio_mode=True, + # OD ~ 1.74+1.67*0.5+0.18*2+0.12*2+0.1=3.2 + # vg ~ 0.15*2+0.62*1+0.49*1+0.12*2+0.12*2+0.08*3+0.19*2+9*0.09=3.3 + dataset_size=[-1, 0.5, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, 0.09]), + dataset=dict(datasets=[ + o365v2_dataset, # 1.74M + oiv6_dataset, # 1.67M + v3det_dataset, # 0.18M + coco2017_train_dataset, # 0.12M + lvis_dataset, # 0.1M + flickr30k_dataset, # 0.15M + gqa_dataset, # 0.62M + coco2014_vg_dataset, # 0.49M + refcoco_dataset, # 0.12M + refcoco_plus_dataset, # 0.12M + refcocog_dataset, # 0.08M + grefcoco_dataset, # 0.19M + grit_dataset # 9M + ])) + +# 4NODES * 8GPU +optim_wrapper = dict(optimizer=dict(lr=0.0001)) + +max_iter = 250000 +train_cfg = dict( + _delete_=True, + type='IterBasedTrainLoop', + max_iters=max_iter, + val_interval=13000) + +param_scheduler = [ + dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_iter, + by_epoch=False, + milestones=[210000], + gamma=0.1) +] + +default_hooks = dict( + checkpoint=dict(by_epoch=False, interval=13000, max_keep_ckpts=30)) +log_processor = dict(by_epoch=False) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg.py new file mode 100644 index 0000000000000000000000000000000000000000..85d43f96b3bdf79081dfb091c1cc8b6c03de7252 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg.py @@ -0,0 +1,227 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth' # noqa +num_levels = 5 +model = dict( + use_autocast=True, + num_feature_levels=num_levels, + backbone=dict( + _delete_=True, + type='SwinTransformer', + pretrain_img_size=384, + embed_dims=192, + depths=[2, 2, 18, 2], + num_heads=[6, 12, 24, 48], + window_size=12, + mlp_ratio=4, + qkv_bias=True, + qk_scale=None, + drop_rate=0., + attn_drop_rate=0., + drop_path_rate=0.2, + patch_norm=True, + out_indices=(0, 1, 2, 3), + # Please only add indices that would be used + # in FPN, otherwise some parameter will not be used + with_cp=True, + convert_weights=True, + frozen_stages=-1, + init_cfg=dict(type='Pretrained', checkpoint=pretrained)), + neck=dict(in_channels=[192, 384, 768, 1536], num_outs=num_levels), + encoder=dict(layer_cfg=dict(self_attn_cfg=dict(num_levels=num_levels))), + decoder=dict(layer_cfg=dict(cross_attn_cfg=dict(num_levels=num_levels)))) + +# --------------------------- object365v2 od dataset--------------------------- +# objv2_backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# './data/objects365v2/': 'yudong:s3://wangyudong/obj365_v2/', +# 'data/objects365v2/': 'yudong:s3://wangyudong/obj365_v2/' +# })) +objv2_backend_args = None + +objv2_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=objv2_backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/objects365v2/annotations/o365v2_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +o365v2_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v2/', + ann_file='annotations/zhiyuan_objv2_train_od.json', + label_map_file='annotations/o365v2_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=objv2_train_pipeline, + return_classes=True, + need_text=False, + backend_args=None, +) + +# --------------------------- openimagev6 od dataset--------------------------- +# oi_backend_args = dict( +# backend='petrel', +# path_mapping=dict({ +# './data/': 's3://openmmlab/datasets/detection/', +# 'data/': 's3://openmmlab/datasets/detection/' +# })) +oi_backend_args = None + +oi_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=oi_backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/OpenImages/annotations/openimages_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +oiv6_dataset = dict( + type='ODVGDataset', + data_root='data/OpenImages/', + ann_file='annotations/oidv6-train-annotations_od.json', + label_map_file='annotations/openimages_label_map.json', + data_prefix=dict(img='OpenImages/train/'), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, + pipeline=oi_train_pipeline, + return_classes=True, + backend_args=None) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + dataset=dict(datasets=[ + o365v2_dataset, oiv6_dataset, flickr30k_dataset, gqa_dataset + ])) + +# 4Nodex8GPU +optim_wrapper = dict(optimizer=dict(lr=0.0002)) + +max_iter = 200000 +train_cfg = dict( + _delete_=True, + type='IterBasedTrainLoop', + max_iters=max_iter, + val_interval=13000) + +param_scheduler = [ + dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_iter, + by_epoch=False, + milestones=[156100], + gamma=0.5) +] + +default_hooks = dict( + checkpoint=dict(by_epoch=False, interval=13000, max_keep_ckpts=30)) +log_processor = dict(by_epoch=False) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py new file mode 100644 index 0000000000000000000000000000000000000000..bf3b35894eb5fcee6db9f02c2ab8a837cd6da20b --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py @@ -0,0 +1,102 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/cat/' +class_name = ('cat', ) +num_classes = len(class_name) +metainfo = dict(classes=class_name, palette=[(220, 20, 60)]) + +model = dict(bbox_head=dict(num_classes=num_classes)) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + return_classes=True, + pipeline=train_pipeline, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + ann_file='annotations/trainval.json', + data_prefix=dict(img='images/'))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + ann_file='annotations/test.json', + data_prefix=dict(img='images/'))) + +test_dataloader = val_dataloader + +val_evaluator = dict(ann_file=data_root + 'annotations/test.json') +test_evaluator = val_evaluator + +max_epoch = 20 + +default_hooks = dict( + checkpoint=dict(interval=1, max_keep_ckpts=1, save_best='auto'), + logger=dict(type='LoggerHook', interval=5)) +train_cfg = dict(max_epochs=max_epoch, val_interval=1) + +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epoch, + by_epoch=True, + milestones=[15], + gamma=0.1) +] + +optim_wrapper = dict( + optimizer=dict(lr=0.0001), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.0), + 'language_model': dict(lr_mult=0.0) + })) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_traffic.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_traffic.py new file mode 100644 index 0000000000000000000000000000000000000000..2eacb919bcbbd34276596833e724213b766ae999 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_finetune_traffic.py @@ -0,0 +1,220 @@ + +# ======================================================== +# MM-Grounding DINO Swin-T 交通设施数据集微调配置 +# 基于预训练模型进行微调,支持 10 类交通设施检测 +# ======================================================== +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' +from pathlib import Path + +_GROUNDING_DINO_ROOT = Path(__file__).resolve().parents[3] +_WORKSPACE_ROOT = _GROUNDING_DINO_ROOT.parents[1] + +# ================= 1. 路径配置 ================= +# 数据集根目录 +data_root = str(_GROUNDING_DINO_ROOT / 'dataset') + '/' +# 训练/验证图片目录根路径 +# 注意: 标注中的 file_name 为相对该目录的路径(如 rect_img_dir/xxx.jpg 或 wuhan/wuhan_rect_dir/xxx.jpg) +# 2_25 版本训练标注中的 file_name 包含 `PanoImages_data_all/...` 与 `crops_scaled1p5/...`, +# 因此训练根目录需要指向 rex_data/data,而不是其下一级 PanoImages_data_all。 +train_img_dir = str(_GROUNDING_DINO_ROOT / 'dataset' / 'images_quad4' / 'train') + '/' +val_img_dir = str(_GROUNDING_DINO_ROOT / 'dataset' / 'images_quad4' / 'val') + '/' + +# ================= 2. 类别定义 ================= +class_name = ( + 'traffic sign', # 交通标志 + 'street light', # 路灯 + 'traffic light', # 交通信号灯 + 'surveillance camera',# 监控摄像头 + 'ball bollard', # 球形护柱 + 'fire hydrant', # 消火栓 + 'trash bin', # 垃圾桶 + 'manhole', # 井盖 + 'traffic cone', # 交通锥 + 'bollard' # 护柱 +) +num_classes = len(class_name) + +metainfo = dict( + classes=class_name, + palette=[ + (220, 20, 60), # traffic sign - 红色 + (119, 11, 32), # street light - 深红 + (0, 0, 142), # traffic light - 蓝色 + (0, 0, 230), # surveillance camera - 亮蓝 + (106, 0, 228), # ball bollard - 紫色 + (0, 60, 100), # fire hydrant - 深青 + (0, 80, 100), # trash bin - 青色 + (0, 0, 70), # manhole - 深蓝 + (0, 0, 192), # traffic cone - 中蓝 + (250, 170, 30) # bollard - 橙色 + ] +) + +# ================= 3. 模型配置 ================= +# 避免分布式启动时从外网并发下载 Swin backbone 预训练权重导致进程中断, +# 这里禁用 backbone 的远程 init_cfg,并使用下面的本地 load_from 统一加载。 +model = dict( + backbone=dict(init_cfg=None), + bbox_head=dict(num_classes=num_classes)) + +# ================= 4. 数据 Pipeline ================= +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +test_pipeline = [ + dict(type='LoadImageFromFile', imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +# ================= 5. 数据加载器 ================= +train_dataloader = dict( + batch_size=16, + num_workers=16, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + return_classes=True, + pipeline=train_pipeline, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + ann_file='train_traffic_data_2_25_quad4.json', + data_prefix=dict(img=train_img_dir))) + +val_dataloader = dict( + batch_size=16, + num_workers=16, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False), + dataset=dict( + type='CocoDataset', + metainfo=metainfo, + data_root=data_root, + return_classes=True, + pipeline=test_pipeline, + ann_file='val_traffic_data_2_25_quad4.json', + data_prefix=dict(img=val_img_dir))) + +test_dataloader = val_dataloader + +# ================= 6. 评估器 ================= +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'val_traffic_data_2_25_quad4.json', + metric='bbox', + format_only=False, + classwise=True) + +test_evaluator = val_evaluator + +# ================= 7. 训练策略 ================= +max_epochs = 20 + +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + interval=1, + max_keep_ckpts=3, + save_best='auto'), + logger=dict(type='LoggerHook', interval=50)) + +train_cfg = dict( + type='EpochBasedTrainLoop', + max_epochs=max_epochs, + val_interval=1) + +# 学习率调度 +param_scheduler = [ + dict( + type='LinearLR', + start_factor=0.001, + by_epoch=False, + begin=0, + end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[15, 18], + gamma=0.1) +] + +# 优化器配置 +# 微调时降低学习率,冻结 backbone 和 language_model +optim_wrapper = dict( + optimizer=dict(lr=0.0001), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.0), # 冻结 backbone + 'language_model': dict(lr_mult=0.0) # 冻结语言模型 + })) + +# 自动缩放学习率 +# base_batch_size = 32 GPUs x 4 samples = 128 +# 实际使用时根据 GPU 数量自动调整 +auto_scale_lr = dict(base_batch_size=64) + +# ================= 8. 断点续训配置 ================= +# 使用本地权重启动,避免训练时网络下载失败 +# 如需改回官方预训练,可将该路径替换为官方 URL。 +load_from = str(_GROUNDING_DINO_ROOT / 'work_dirs' / 'mm_grounding_dino_traffic' / 'epoch_20.pth') + +# 从 epoch_14 继续训练 +#resume = True +#load_from = str(_GROUNDING_DINO_ROOT / 'work_dirs' / 'mm_grounding_dino_traffic' / 'epoch_14.pth') + +# ================= 9. 工作目录 ================= +work_dir = str(_GROUNDING_DINO_ROOT / 'work_dirs' / 'mm_grounding_dino_traffic') diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py new file mode 100644 index 0000000000000000000000000000000000000000..66060f45ea735ab5bbd8e1852c035ea20adcbd80 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py @@ -0,0 +1,247 @@ +_base_ = [ + '../_base_/datasets/coco_detection.py', + '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py' +] +pretrained = 'https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_tiny_patch4_window7_224.pth' # noqa +lang_model_name = 'bert-base-uncased' + +model = dict( + type='GroundingDINO', + num_queries=900, + with_box_refine=True, + as_two_stage=True, + data_preprocessor=dict( + type='DetDataPreprocessor', + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True, + pad_mask=False, + ), + language_model=dict( + type='BertModel', + name=lang_model_name, + max_tokens=256, + pad_to_max=False, + use_sub_sentence_represent=True, + special_tokens_list=['[CLS]', '[SEP]', '.', '?'], + add_pooling_layer=False, + ), + backbone=dict( + type='SwinTransformer', + embed_dims=96, + depths=[2, 2, 6, 2], + num_heads=[3, 6, 12, 24], + window_size=7, + mlp_ratio=4, + qkv_bias=True, + qk_scale=None, + drop_rate=0., + attn_drop_rate=0., + drop_path_rate=0.2, + patch_norm=True, + out_indices=(1, 2, 3), + with_cp=True, + convert_weights=True, + frozen_stages=-1, + init_cfg=dict(type='Pretrained', checkpoint=pretrained)), + neck=dict( + type='ChannelMapper', + in_channels=[192, 384, 768], + kernel_size=1, + out_channels=256, + act_cfg=None, + bias=True, + norm_cfg=dict(type='GN', num_groups=32), + num_outs=4), + encoder=dict( + num_layers=6, + num_cp=6, + # visual layer config + layer_cfg=dict( + self_attn_cfg=dict(embed_dims=256, num_levels=4, dropout=0.0), + ffn_cfg=dict( + embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)), + # text layer config + text_layer_cfg=dict( + self_attn_cfg=dict(num_heads=4, embed_dims=256, dropout=0.0), + ffn_cfg=dict( + embed_dims=256, feedforward_channels=1024, ffn_drop=0.0)), + # fusion layer config + fusion_layer_cfg=dict( + v_dim=256, + l_dim=256, + embed_dim=1024, + num_heads=4, + init_values=1e-4), + ), + decoder=dict( + num_layers=6, + return_intermediate=True, + layer_cfg=dict( + # query self attention layer + self_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0), + # cross attention layer query to text + cross_attn_text_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0), + # cross attention layer query to image + cross_attn_cfg=dict(embed_dims=256, num_heads=8, dropout=0.0), + ffn_cfg=dict( + embed_dims=256, feedforward_channels=2048, ffn_drop=0.0)), + post_norm_cfg=None), + positional_encoding=dict( + num_feats=128, normalize=True, offset=0.0, temperature=20), + bbox_head=dict( + type='GroundingDINOHead', + num_classes=256, + sync_cls_avg_factor=True, + contrastive_cfg=dict(max_text_len=256, log_scale='auto', bias=True), + loss_cls=dict( + type='FocalLoss', + use_sigmoid=True, + gamma=2.0, + alpha=0.25, + loss_weight=1.0), # 2.0 in DeformDETR + loss_bbox=dict(type='L1Loss', loss_weight=5.0)), + dn_cfg=dict( # TODO: Move to model.train_cfg ? + label_noise_scale=0.5, + box_noise_scale=1.0, # 0.4 for DN-DETR + group_cfg=dict(dynamic=True, num_groups=None, + num_dn_queries=100)), # TODO: half num_dn_queries + # training and testing settings + train_cfg=dict( + assigner=dict( + type='HungarianAssigner', + match_costs=[ + dict(type='BinaryFocalLossCost', weight=2.0), + dict(type='BBoxL1Cost', weight=5.0, box_format='xywh'), + dict(type='IoUCost', iou_mode='giou', weight=2.0) + ])), + test_cfg=dict(max_per_img=300)) + +# dataset settings +train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +dataset_type = 'ODVGDataset' +data_root = 'data/objects365v1/' + +coco_od_dataset = dict( + type=dataset_type, + data_root=data_root, + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + _delete_=True, + batch_size=4, + num_workers=4, + persistent_workers=True, + sampler=dict(type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict(type='ConcatDataset', datasets=[coco_od_dataset])) + +val_dataloader = dict( + dataset=dict(pipeline=test_pipeline, return_classes=True)) +test_dataloader = val_dataloader + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0004, + weight_decay=0.0001), # bs=16 0.0001 + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + 'language_model': dict(lr_mult=0.1), + })) + +# learning policy +max_epochs = 30 +param_scheduler = [ + dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000), + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[19, 26], + gamma=0.1) +] + +train_cfg = dict( + type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1) + +# NOTE: `auto_scale_lr` is for automatically scaling LR, +# USER SHOULD NOT CHANGE ITS VALUES. +# base_batch_size = (16 GPUs) x (2 samples per GPU) +auto_scale_lr = dict(base_batch_size=64) + +default_hooks = dict(visualization=dict(type='GroundingVisualizationHook')) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg.py new file mode 100644 index 0000000000000000000000000000000000000000..b7f388bdd4e8b61d1e7b6fd19445b3628164c4a0 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg.py @@ -0,0 +1,38 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + dataset=dict(datasets=[o365v1_od_dataset, flickr30k_dataset, gqa_dataset])) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py new file mode 100644 index 0000000000000000000000000000000000000000..8e9f5ca4aaba7afb631f76b8a575101868fed2a4 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py @@ -0,0 +1,55 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +grit_dataset = dict( + type='ODVGDataset', + data_root='grit_processed/', + ann_file='grit20m_vg.json', + label_map_file=None, + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + sampler=dict( + _delete_=True, + type='CustomSampleSizeSampler', + dataset_size=[-1, -1, -1, 500000]), + dataset=dict(datasets=[ + o365v1_od_dataset, flickr30k_dataset, gqa_dataset, grit_dataset + ])) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py new file mode 100644 index 0000000000000000000000000000000000000000..56e500c86932a8e61dba88fde2bfc00c0ced5585 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py @@ -0,0 +1,117 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +v3d_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/V3Det/annotations/v3det_2023_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +v3det_dataset = dict( + type='ODVGDataset', + data_root='data/V3Det/', + ann_file='annotations/v3det_2023_v1_train_od.json', + label_map_file='annotations/v3det_2023_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=v3d_train_pipeline, + return_classes=True, + backend_args=None) + +grit_dataset = dict( + type='ODVGDataset', + data_root='grit_processed/', + ann_file='grit20m_vg.json', + label_map_file=None, + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + sampler=dict( + _delete_=True, + type='CustomSampleSizeSampler', + dataset_size=[-1, -1, -1, -1, 500000]), + dataset=dict(datasets=[ + o365v1_od_dataset, flickr30k_dataset, gqa_dataset, v3det_dataset, + grit_dataset + ])) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py new file mode 100644 index 0000000000000000000000000000000000000000..c89014fbbe43a1e7787fa46d7d850d42a64ff8a9 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py @@ -0,0 +1,101 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +o365v1_od_dataset = dict( + type='ODVGDataset', + data_root='data/objects365v1/', + ann_file='o365v1_train_odvg.json', + label_map_file='o365v1_label_map.json', + data_prefix=dict(img='train/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None, +) + +flickr30k_dataset = dict( + type='ODVGDataset', + data_root='data/flickr30k_entities/', + ann_file='final_flickr_separateGT_train_vg.json', + label_map_file=None, + data_prefix=dict(img='flickr30k_images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +gqa_dataset = dict( + type='ODVGDataset', + data_root='data/gqa/', + ann_file='final_mixed_train_no_coco_vg.json', + label_map_file=None, + data_prefix=dict(img='images/'), + filter_cfg=dict(filter_empty_gt=False), + pipeline=_base_.train_pipeline, + return_classes=True, + backend_args=None) + +v3d_train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/V3Det/annotations/v3det_2023_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] +v3det_dataset = dict( + type='ODVGDataset', + data_root='data/V3Det/', + ann_file='annotations/v3det_2023_v1_train_od.json', + label_map_file='annotations/v3det_2023_v1_label_map.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False), + need_text=False, # change this + pipeline=v3d_train_pipeline, + return_classes=True, + backend_args=None) + +train_dataloader = dict( + dataset=dict(datasets=[ + o365v1_od_dataset, flickr30k_dataset, gqa_dataset, v3det_dataset + ])) diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py new file mode 100644 index 0000000000000000000000000000000000000000..6dc8dcd8df4b98a3fdb3aa26d73ce353b9251f50 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py @@ -0,0 +1,43 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadTextAnnotations'), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +data_root = 'data/cat/' + +val_dataloader = dict( + batch_size=1, + num_workers=2, + persistent_workers=False, + dataset=dict( + type='ODVGDataset', + data_root=data_root, + label_map_file='cat_label_map.json', + ann_file='cat_train_od.json', + data_prefix=dict(img='images/'), + pipeline=test_pipeline, + return_classes=True)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + outfile_path=data_root + 'cat_train_od_v1.json', + img_prefix=data_root + 'images/', + score_thr=0.7, + nms_thr=0.5, + type='DumpODVGResults') +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py new file mode 100644 index 0000000000000000000000000000000000000000..78bf1c344bf7c795ace08283b745527dfc9b15f7 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py @@ -0,0 +1,42 @@ +_base_ = 'grounding_dino_swin-t_pretrain_obj365.py' + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadTextAnnotations'), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +data_root = 'data/flickr30k_entities/' + +val_dataloader = dict( + batch_size=1, + num_workers=2, + persistent_workers=False, + dataset=dict( + type='ODVGDataset', + data_root=data_root, + ann_file='flickr_simple_train_vg.json', + data_prefix=dict(img='flickr30k_images/'), + pipeline=test_pipeline, + return_classes=True)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + outfile_path=data_root + 'flickr_simple_train_vg_v1.json', + img_prefix=data_root + 'flickr30k_images/', + score_thr=0.4, + nms_thr=0.5, + type='DumpODVGResults') +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py new file mode 100644 index 0000000000000000000000000000000000000000..3ba12c9067511b00b616781ca0cf2e477e5e689e --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis.py @@ -0,0 +1,120 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +model = dict(test_cfg=dict( + max_per_img=300, + chunked_size=40, +)) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/coco/annotations/lvis_v1_label_map.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ClassBalancedDataset', + oversample_thr=1e-3, + dataset=dict( + type='ODVGDataset', + data_root=data_root, + need_text=False, + label_map_file='annotations/lvis_v1_label_map.json', + ann_file='annotations/lvis_v1_train_od.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline))) + +val_dataloader = dict( + dataset=dict( + data_root=data_root, + type='LVISV1Dataset', + ann_file='annotations/lvis_v1_minival_inserted_image_name.json', + data_prefix=dict(img=''))) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='LVISFixedAPMetric', + ann_file=data_root + + 'annotations/lvis_v1_minival_inserted_image_name.json') +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=3) + +default_hooks = dict( + checkpoint=dict( + max_keep_ckpts=1, save_best='lvis_fixed_ap/AP', rule='greater')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py new file mode 100644 index 0000000000000000000000000000000000000000..28d0141d3e2c0feba26ae4ed924000960c311bf5 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_finetune_16xb4_1x_lvis_866_337.py @@ -0,0 +1,120 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +model = dict(test_cfg=dict( + max_per_img=300, + chunked_size=40, +)) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + # change this + label_map_file='data/coco/annotations/lvis_v1_label_map_norare.json', + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ClassBalancedDataset', + oversample_thr=1e-3, + dataset=dict( + type='ODVGDataset', + data_root=data_root, + need_text=False, + label_map_file='annotations/lvis_v1_label_map_norare.json', + ann_file='annotations/lvis_v1_train_od_norare.json', + data_prefix=dict(img=''), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline))) + +val_dataloader = dict( + dataset=dict( + data_root=data_root, + type='LVISV1Dataset', + ann_file='annotations/lvis_v1_minival_inserted_image_name.json', + data_prefix=dict(img=''))) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='LVISFixedAPMetric', + ann_file=data_root + + 'annotations/lvis_v1_minival_inserted_image_name.json') +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.00005, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[8, 11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=3) + +default_hooks = dict( + checkpoint=dict( + max_keep_ckpts=3, save_best='lvis_fixed_ap/AP', rule='greater')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py new file mode 100644 index 0000000000000000000000000000000000000000..fb4ed438e0b59ca4c991836310cf7103cc02f0f2 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_lvis.py @@ -0,0 +1,24 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +model = dict(test_cfg=dict( + max_per_img=300, + chunked_size=40, +)) + +dataset_type = 'LVISV1Dataset' +data_root = 'data/coco/' + +val_dataloader = dict( + dataset=dict( + data_root=data_root, + type=dataset_type, + ann_file='annotations/lvis_od_val.json', + data_prefix=dict(img=''))) +test_dataloader = val_dataloader + +# numpy < 1.24.0 +val_evaluator = dict( + _delete_=True, + type='LVISFixedAPMetric', + ann_file=data_root + 'annotations/lvis_od_val.json') +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py new file mode 100644 index 0000000000000000000000000000000000000000..406a39a4264a0d6ea5d7950a205b0bac72e8f846 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/lvis/grounding_dino_swin-t_pretrain_zeroshot_mini-lvis.py @@ -0,0 +1,25 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +model = dict(test_cfg=dict( + max_per_img=300, + chunked_size=40, +)) + +dataset_type = 'LVISV1Dataset' +data_root = 'data/coco/' + +val_dataloader = dict( + dataset=dict( + data_root=data_root, + type=dataset_type, + ann_file='annotations/lvis_v1_minival_inserted_image_name.json', + data_prefix=dict(img=''))) +test_dataloader = val_dataloader + +# numpy < 1.24.0 +val_evaluator = dict( + _delete_=True, + type='LVISFixedAPMetric', + ann_file=data_root + + 'annotations/lvis_v1_minival_inserted_image_name.json') +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/metafile.yml b/grounding-dino/mmdetection/configs/mm_grounding_dino/metafile.yml new file mode 100644 index 0000000000000000000000000000000000000000..c104ac051363ab1ed033061e7b01274404d300d1 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/metafile.yml @@ -0,0 +1,90 @@ +Collections: + - Name: MM Grounding DINO + Metadata: + Training Data: Objects365, GoldG, GRIT and V3Det + Training Techniques: + - AdamW + - Multi Scale Train + - Gradient Clip + Training Resources: 3090 GPUs + Architecture: + - Swin Transformer + - BERT + README: configs/mm_grounding_dino/README.md + Code: + URL: + Version: v3.0.0 + +Models: + - Name: grounding_dino_swin-t_pretrain_obj365_goldg + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 50.4 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg/grounding_dino_swin-t_pretrain_obj365_goldg_20231122_132602-4ea751ce.pth + - Name: grounding_dino_swin-t_pretrain_obj365_goldg_grit9m + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 50.5 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_20231128_200818-169cc352.pth + - Name: grounding_dino_swin-t_pretrain_obj365_goldg_v3det + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 50.6 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_v3det_20231218_095741-e316e297.pth + - Name: grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 50.4 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth + - Name: grounding_dino_swin-b_pretrain_obj365_goldg_v3det + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 52.5 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-b_pretrain_obj365_goldg_v3det/grounding_dino_swin-b_pretrain_obj365_goldg_v3de-f83eef00.pth + - Name: grounding_dino_swin-b_pretrain_all + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-b_pretrain_all.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 59.5 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-b_pretrain_all/grounding_dino_swin-b_pretrain_all-f9818a7c.pth + - Name: grounding_dino_swin-l_pretrain_obj365_goldg + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 53.0 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-l_pretrain_obj365_goldg/grounding_dino_swin-l_pretrain_obj365_goldg-34dcdc53.pth + - Name: grounding_dino_swin-l_pretrain_all + In Collection: MM Grounding DINO + Config: configs/mm_grounding_dino/grounding_dino_swin-l_pretrain_all.py + Results: + - Task: Object Detection + Dataset: COCO + Metrics: + box AP: 60.3 + Weights: https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-l_pretrain_all/grounding_dino_swin-l_pretrain_all-56d69e78.pth diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py new file mode 100644 index 0000000000000000000000000000000000000000..d87ca7ca1ea48a3cff83e15f3e2ad66927598d7f --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py @@ -0,0 +1,338 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' # noqa + +dataset_type = 'CocoDataset' +data_root = 'data/odinw/' + +base_test_pipeline = _base_.test_pipeline +base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape', + 'img_shape', 'scale_factor', 'text', + 'custom_entities', 'caption_prompt') + +# ---------------------1 AerialMaritimeDrone---------------------# +class_name = ('boat', 'car', 'dock', 'jetski', 'lift') +metainfo = dict(classes=class_name) +_data_root = data_root + 'AerialMaritimeDrone/large/' +dataset_AerialMaritimeDrone = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + test_mode=True, + pipeline=base_test_pipeline, + return_classes=True) +val_evaluator_AerialMaritimeDrone = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------2 Aquarium---------------------# +class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish', + 'stingray') +metainfo = dict(classes=class_name) +_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/' + +caption_prompt = None +# caption_prompt = { +# 'penguin': { +# 'suffix': ', which is black and white' +# }, +# 'puffin': { +# 'suffix': ' with orange beaks' +# }, +# 'stingray': { +# 'suffix': ' which is flat and round' +# }, +# } +dataset_Aquarium = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_Aquarium = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------3 CottontailRabbits---------------------# +class_name = ('Cottontail-Rabbit', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'CottontailRabbits/' + +# caption_prompt = None +caption_prompt = {'Cottontail-Rabbit': {'name': 'rabbit'}} + +dataset_CottontailRabbits = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_CottontailRabbits = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------4 EgoHands---------------------# +class_name = ('hand', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'EgoHands/generic/' + +# caption_prompt = None +caption_prompt = {'hand': {'suffix': ' of a person'}} + +dataset_EgoHands = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_EgoHands = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------5 NorthAmericaMushrooms---------------------# +class_name = ('CoW', 'chanterelle') +metainfo = dict(classes=class_name) +_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa + +# caption_prompt = None +caption_prompt = { + 'CoW': { + 'name': 'flat mushroom' + }, + 'chanterelle': { + 'name': 'yellow mushroom' + } +} + +dataset_NorthAmericaMushrooms = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_NorthAmericaMushrooms = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------6 Packages---------------------# +class_name = ('package', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'Packages/Raw/' + +# caption_prompt = None +caption_prompt = { + 'package': { + 'prefix': 'there is a ', + 'suffix': ' on the porch' + } +} + +dataset_Packages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_Packages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------7 PascalVOC---------------------# +class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', + 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse', + 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', + 'tvmonitor') +metainfo = dict(classes=class_name) +_data_root = data_root + 'PascalVOC/' +dataset_PascalVOC = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_PascalVOC = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------8 pistols---------------------# +class_name = ('pistol', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'pistols/export/' +dataset_pistols = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='val_annotations_without_background.json', + data_prefix=dict(img=''), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_pistols = dict( + type='CocoMetric', + ann_file=_data_root + 'val_annotations_without_background.json', + metric='bbox') + +# ---------------------9 pothole---------------------# +class_name = ('pothole', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'pothole/' + +# caption_prompt = None +caption_prompt = { + 'pothole': { + 'prefix': 'there are some ', + 'name': 'holes', + 'suffix': ' on the road' + } +} + +dataset_pothole = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_pothole = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------10 Raccoon---------------------# +class_name = ('raccoon', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/' +dataset_Raccoon = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_Raccoon = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------11 ShellfishOpenImages---------------------# +class_name = ('Crab', 'Lobster', 'Shrimp') +metainfo = dict(classes=class_name) +_data_root = data_root + 'ShellfishOpenImages/raw/' +dataset_ShellfishOpenImages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_ShellfishOpenImages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------12 thermalDogsAndPeople---------------------# +class_name = ('dog', 'person') +metainfo = dict(classes=class_name) +_data_root = data_root + 'thermalDogsAndPeople/' +dataset_thermalDogsAndPeople = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_thermalDogsAndPeople = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------13 VehiclesOpenImages---------------------# +class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck') +metainfo = dict(classes=class_name) +_data_root = data_root + 'VehiclesOpenImages/416x416/' +dataset_VehiclesOpenImages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_VehiclesOpenImages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# --------------------- Config---------------------# +dataset_prefixes = [ + 'AerialMaritimeDrone', 'Aquarium', 'CottontailRabbits', 'EgoHands', + 'NorthAmericaMushrooms', 'Packages', 'PascalVOC', 'pistols', 'pothole', + 'Raccoon', 'ShellfishOpenImages', 'thermalDogsAndPeople', + 'VehiclesOpenImages' +] +datasets = [ + dataset_AerialMaritimeDrone, dataset_Aquarium, dataset_CottontailRabbits, + dataset_EgoHands, dataset_NorthAmericaMushrooms, dataset_Packages, + dataset_PascalVOC, dataset_pistols, dataset_pothole, dataset_Raccoon, + dataset_ShellfishOpenImages, dataset_thermalDogsAndPeople, + dataset_VehiclesOpenImages +] +metrics = [ + val_evaluator_AerialMaritimeDrone, val_evaluator_Aquarium, + val_evaluator_CottontailRabbits, val_evaluator_EgoHands, + val_evaluator_NorthAmericaMushrooms, val_evaluator_Packages, + val_evaluator_PascalVOC, val_evaluator_pistols, val_evaluator_pothole, + val_evaluator_Raccoon, val_evaluator_ShellfishOpenImages, + val_evaluator_thermalDogsAndPeople, val_evaluator_VehiclesOpenImages +] + +# -------------------------------------------------# +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py new file mode 100644 index 0000000000000000000000000000000000000000..a6b8566aed486ef48653b6e54200cb8817910f2f --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw35.py @@ -0,0 +1,794 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' # noqa + +dataset_type = 'CocoDataset' +data_root = 'data/odinw/' + +base_test_pipeline = _base_.test_pipeline +base_test_pipeline[-1]['meta_keys'] = ('img_id', 'img_path', 'ori_shape', + 'img_shape', 'scale_factor', 'text', + 'custom_entities', 'caption_prompt') + +# ---------------------1 AerialMaritimeDrone_large---------------------# +class_name = ('boat', 'car', 'dock', 'jetski', 'lift') +metainfo = dict(classes=class_name) +_data_root = data_root + 'AerialMaritimeDrone/large/' +dataset_AerialMaritimeDrone_large = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_AerialMaritimeDrone_large = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------2 AerialMaritimeDrone_tiled---------------------# +class_name = ('boat', 'car', 'dock', 'jetski', 'lift') +metainfo = dict(classes=class_name) +_data_root = data_root + 'AerialMaritimeDrone/tiled/' +dataset_AerialMaritimeDrone_tiled = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_AerialMaritimeDrone_tiled = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------3 AmericanSignLanguageLetters---------------------# +class_name = ('A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'I', 'J', 'K', 'L', 'M', + 'N', 'O', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X', 'Y', 'Z') +metainfo = dict(classes=class_name) +_data_root = data_root + 'AmericanSignLanguageLetters/American Sign Language Letters.v1-v1.coco/' # noqa +dataset_AmericanSignLanguageLetters = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_AmericanSignLanguageLetters = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------4 Aquarium---------------------# +class_name = ('fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish', + 'stingray') +metainfo = dict(classes=class_name) +_data_root = data_root + 'Aquarium/Aquarium Combined.v2-raw-1024.coco/' +dataset_Aquarium = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_Aquarium = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------5 BCCD---------------------# +class_name = ('Platelets', 'RBC', 'WBC') +metainfo = dict(classes=class_name) +_data_root = data_root + 'BCCD/BCCD.v3-raw.coco/' +dataset_BCCD = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_BCCD = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------6 boggleBoards---------------------# +class_name = ('Q', 'a', 'an', 'b', 'c', 'd', 'e', 'er', 'f', 'g', 'h', 'he', + 'i', 'in', 'j', 'k', 'l', 'm', 'n', 'o', 'o ', 'p', 'q', 'qu', + 'r', 's', 't', 't\\', 'th', 'u', 'v', 'w', 'wild', 'x', 'y', 'z') +metainfo = dict(classes=class_name) +_data_root = data_root + 'boggleBoards/416x416AutoOrient/export/' +dataset_boggleBoards = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='val_annotations_without_background.json', + data_prefix=dict(img=''), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_boggleBoards = dict( + type='CocoMetric', + ann_file=_data_root + 'val_annotations_without_background.json', + metric='bbox') + +# ---------------------7 brackishUnderwater---------------------# +class_name = ('crab', 'fish', 'jellyfish', 'shrimp', 'small_fish', 'starfish') +metainfo = dict(classes=class_name) +_data_root = data_root + 'brackishUnderwater/960x540/' +dataset_brackishUnderwater = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_brackishUnderwater = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------8 ChessPieces---------------------# +class_name = (' ', 'black bishop', 'black king', 'black knight', 'black pawn', + 'black queen', 'black rook', 'white bishop', 'white king', + 'white knight', 'white pawn', 'white queen', 'white rook') +metainfo = dict(classes=class_name) +_data_root = data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/' +dataset_ChessPieces = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/new_annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_ChessPieces = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/new_annotations_without_background.json', + metric='bbox') + +# ---------------------9 CottontailRabbits---------------------# +class_name = ('rabbit', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'CottontailRabbits/' +dataset_CottontailRabbits = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/new_annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_CottontailRabbits = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/new_annotations_without_background.json', + metric='bbox') + +# ---------------------10 dice---------------------# +class_name = ('1', '2', '3', '4', '5', '6') +metainfo = dict(classes=class_name) +_data_root = data_root + 'dice/mediumColor/export/' +dataset_dice = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='val_annotations_without_background.json', + data_prefix=dict(img=''), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_dice = dict( + type='CocoMetric', + ann_file=_data_root + 'val_annotations_without_background.json', + metric='bbox') + +# ---------------------11 DroneControl---------------------# +class_name = ('follow', 'follow_hand', 'land', 'land_hand', 'null', 'object', + 'takeoff', 'takeoff-hand') +metainfo = dict(classes=class_name) +_data_root = data_root + 'DroneControl/Drone Control.v3-raw.coco/' +dataset_DroneControl = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_DroneControl = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------12 EgoHands_generic---------------------# +class_name = ('hand', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'EgoHands/generic/' +caption_prompt = {'hand': {'suffix': ' of a person'}} +dataset_EgoHands_generic = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_EgoHands_generic = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------13 EgoHands_specific---------------------# +class_name = ('myleft', 'myright', 'yourleft', 'yourright') +metainfo = dict(classes=class_name) +_data_root = data_root + 'EgoHands/specific/' +dataset_EgoHands_specific = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_EgoHands_specific = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------14 HardHatWorkers---------------------# +class_name = ('head', 'helmet', 'person') +metainfo = dict(classes=class_name) +_data_root = data_root + 'HardHatWorkers/raw/' +dataset_HardHatWorkers = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_HardHatWorkers = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------15 MaskWearing---------------------# +class_name = ('mask', 'no-mask') +metainfo = dict(classes=class_name) +_data_root = data_root + 'MaskWearing/raw/' +dataset_MaskWearing = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_MaskWearing = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------16 MountainDewCommercial---------------------# +class_name = ('bottle', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'MountainDewCommercial/' +dataset_MountainDewCommercial = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_MountainDewCommercial = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------17 NorthAmericaMushrooms---------------------# +class_name = ('flat mushroom', 'yellow mushroom') +metainfo = dict(classes=class_name) +_data_root = data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa +dataset_NorthAmericaMushrooms = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/new_annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_NorthAmericaMushrooms = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/new_annotations_without_background.json', + metric='bbox') + +# ---------------------18 openPoetryVision---------------------# +class_name = ('American Typewriter', 'Andale Mono', 'Apple Chancery', 'Arial', + 'Avenir', 'Baskerville', 'Big Caslon', 'Bradley Hand', + 'Brush Script MT', 'Chalkboard', 'Comic Sans MS', 'Copperplate', + 'Courier', 'Didot', 'Futura', 'Geneva', 'Georgia', 'Gill Sans', + 'Helvetica', 'Herculanum', 'Impact', 'Kefa', 'Lucida Grande', + 'Luminari', 'Marker Felt', 'Menlo', 'Monaco', 'Noteworthy', + 'Optima', 'PT Sans', 'PT Serif', 'Palatino', 'Papyrus', + 'Phosphate', 'Rockwell', 'SF Pro', 'SignPainter', 'Skia', + 'Snell Roundhand', 'Tahoma', 'Times New Roman', 'Trebuchet MS', + 'Verdana') +metainfo = dict(classes=class_name) +_data_root = data_root + 'openPoetryVision/512x512/' +dataset_openPoetryVision = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_openPoetryVision = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------19 OxfordPets_by_breed---------------------# +class_name = ('cat-Abyssinian', 'cat-Bengal', 'cat-Birman', 'cat-Bombay', + 'cat-British_Shorthair', 'cat-Egyptian_Mau', 'cat-Maine_Coon', + 'cat-Persian', 'cat-Ragdoll', 'cat-Russian_Blue', 'cat-Siamese', + 'cat-Sphynx', 'dog-american_bulldog', + 'dog-american_pit_bull_terrier', 'dog-basset_hound', + 'dog-beagle', 'dog-boxer', 'dog-chihuahua', + 'dog-english_cocker_spaniel', 'dog-english_setter', + 'dog-german_shorthaired', 'dog-great_pyrenees', 'dog-havanese', + 'dog-japanese_chin', 'dog-keeshond', 'dog-leonberger', + 'dog-miniature_pinscher', 'dog-newfoundland', 'dog-pomeranian', + 'dog-pug', 'dog-saint_bernard', 'dog-samoyed', + 'dog-scottish_terrier', 'dog-shiba_inu', + 'dog-staffordshire_bull_terrier', 'dog-wheaten_terrier', + 'dog-yorkshire_terrier') +metainfo = dict(classes=class_name) +_data_root = data_root + 'OxfordPets/by-breed/' # noqa +dataset_OxfordPets_by_breed = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_OxfordPets_by_breed = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------20 OxfordPets_by_species---------------------# +class_name = ('cat', 'dog') +metainfo = dict(classes=class_name) +_data_root = data_root + 'OxfordPets/by-species/' # noqa +dataset_OxfordPets_by_species = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_OxfordPets_by_species = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------21 PKLot---------------------# +class_name = ('space-empty', 'space-occupied') +metainfo = dict(classes=class_name) +_data_root = data_root + 'PKLot/640/' # noqa +dataset_PKLot = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_PKLot = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------22 Packages---------------------# +class_name = ('package', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'Packages/Raw/' +caption_prompt = { + 'package': { + 'prefix': 'there is a ', + 'suffix': ' on the porch' + } +} +dataset_Packages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=base_test_pipeline, + caption_prompt=caption_prompt, + test_mode=True, + return_classes=True) +val_evaluator_Packages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------23 PascalVOC---------------------# +class_name = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', + 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse', + 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', + 'tvmonitor') +metainfo = dict(classes=class_name) +_data_root = data_root + 'PascalVOC/' +dataset_PascalVOC = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_PascalVOC = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------24 pistols---------------------# +class_name = ('pistol', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'pistols/export/' +dataset_pistols = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='val_annotations_without_background.json', + data_prefix=dict(img=''), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_pistols = dict( + type='CocoMetric', + ann_file=_data_root + 'val_annotations_without_background.json', + metric='bbox') + +# ---------------------25 plantdoc---------------------# +class_name = ('Apple Scab Leaf', 'Apple leaf', 'Apple rust leaf', + 'Bell_pepper leaf', 'Bell_pepper leaf spot', 'Blueberry leaf', + 'Cherry leaf', 'Corn Gray leaf spot', 'Corn leaf blight', + 'Corn rust leaf', 'Peach leaf', 'Potato leaf', + 'Potato leaf early blight', 'Potato leaf late blight', + 'Raspberry leaf', 'Soyabean leaf', 'Soybean leaf', + 'Squash Powdery mildew leaf', 'Strawberry leaf', + 'Tomato Early blight leaf', 'Tomato Septoria leaf spot', + 'Tomato leaf', 'Tomato leaf bacterial spot', + 'Tomato leaf late blight', 'Tomato leaf mosaic virus', + 'Tomato leaf yellow virus', 'Tomato mold leaf', + 'Tomato two spotted spider mites leaf', 'grape leaf', + 'grape leaf black rot') +metainfo = dict(classes=class_name) +_data_root = data_root + 'plantdoc/416x416/' +dataset_plantdoc = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_plantdoc = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------26 pothole---------------------# +class_name = ('pothole', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'pothole/' +caption_prompt = { + 'pothole': { + 'name': 'holes', + 'prefix': 'there are some ', + 'suffix': ' on the road' + } +} +dataset_pothole = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + caption_prompt=caption_prompt, + pipeline=base_test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_pothole = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------27 Raccoon---------------------# +class_name = ('raccoon', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'Raccoon/Raccoon.v2-raw.coco/' +dataset_Raccoon = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_Raccoon = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------28 selfdrivingCar---------------------# +class_name = ('biker', 'car', 'pedestrian', 'trafficLight', + 'trafficLight-Green', 'trafficLight-GreenLeft', + 'trafficLight-Red', 'trafficLight-RedLeft', + 'trafficLight-Yellow', 'trafficLight-YellowLeft', 'truck') +metainfo = dict(classes=class_name) +_data_root = data_root + 'selfdrivingCar/fixedLarge/export/' +dataset_selfdrivingCar = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='val_annotations_without_background.json', + data_prefix=dict(img=''), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_selfdrivingCar = dict( + type='CocoMetric', + ann_file=_data_root + 'val_annotations_without_background.json', + metric='bbox') + +# ---------------------29 ShellfishOpenImages---------------------# +class_name = ('Crab', 'Lobster', 'Shrimp') +metainfo = dict(classes=class_name) +_data_root = data_root + 'ShellfishOpenImages/raw/' +dataset_ShellfishOpenImages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_ShellfishOpenImages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------30 ThermalCheetah---------------------# +class_name = ('cheetah', 'human') +metainfo = dict(classes=class_name) +_data_root = data_root + 'ThermalCheetah/' +dataset_ThermalCheetah = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_ThermalCheetah = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------31 thermalDogsAndPeople---------------------# +class_name = ('dog', 'person') +metainfo = dict(classes=class_name) +_data_root = data_root + 'thermalDogsAndPeople/' +dataset_thermalDogsAndPeople = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_thermalDogsAndPeople = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------32 UnoCards---------------------# +class_name = ('0', '1', '2', '3', '4', '5', '6', '7', '8', '9', '10', '11', + '12', '13', '14') +metainfo = dict(classes=class_name) +_data_root = data_root + 'UnoCards/raw/' +dataset_UnoCards = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_UnoCards = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------33 VehiclesOpenImages---------------------# +class_name = ('Ambulance', 'Bus', 'Car', 'Motorcycle', 'Truck') +metainfo = dict(classes=class_name) +_data_root = data_root + 'VehiclesOpenImages/416x416/' +dataset_VehiclesOpenImages = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_VehiclesOpenImages = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------34 WildfireSmoke---------------------# +class_name = ('smoke', ) +metainfo = dict(classes=class_name) +_data_root = data_root + 'WildfireSmoke/' +dataset_WildfireSmoke = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_WildfireSmoke = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# ---------------------35 websiteScreenshots---------------------# +class_name = ('button', 'field', 'heading', 'iframe', 'image', 'label', 'link', + 'text') +metainfo = dict(classes=class_name) +_data_root = data_root + 'websiteScreenshots/' +dataset_websiteScreenshots = dict( + type=dataset_type, + metainfo=metainfo, + data_root=_data_root, + ann_file='valid/annotations_without_background.json', + data_prefix=dict(img='valid/'), + pipeline=_base_.test_pipeline, + test_mode=True, + return_classes=True) +val_evaluator_websiteScreenshots = dict( + type='CocoMetric', + ann_file=_data_root + 'valid/annotations_without_background.json', + metric='bbox') + +# --------------------- Config---------------------# + +dataset_prefixes = [ + 'AerialMaritimeDrone_large', + 'AerialMaritimeDrone_tiled', + 'AmericanSignLanguageLetters', + 'Aquarium', + 'BCCD', + 'boggleBoards', + 'brackishUnderwater', + 'ChessPieces', + 'CottontailRabbits', + 'dice', + 'DroneControl', + 'EgoHands_generic', + 'EgoHands_specific', + 'HardHatWorkers', + 'MaskWearing', + 'MountainDewCommercial', + 'NorthAmericaMushrooms', + 'openPoetryVision', + 'OxfordPets_by_breed', + 'OxfordPets_by_species', + 'PKLot', + 'Packages', + 'PascalVOC', + 'pistols', + 'plantdoc', + 'pothole', + 'Raccoons', + 'selfdrivingCar', + 'ShellfishOpenImages', + 'ThermalCheetah', + 'thermalDogsAndPeople', + 'UnoCards', + 'VehiclesOpenImages', + 'WildfireSmoke', + 'websiteScreenshots', +] + +datasets = [ + dataset_AerialMaritimeDrone_large, dataset_AerialMaritimeDrone_tiled, + dataset_AmericanSignLanguageLetters, dataset_Aquarium, dataset_BCCD, + dataset_boggleBoards, dataset_brackishUnderwater, dataset_ChessPieces, + dataset_CottontailRabbits, dataset_dice, dataset_DroneControl, + dataset_EgoHands_generic, dataset_EgoHands_specific, + dataset_HardHatWorkers, dataset_MaskWearing, dataset_MountainDewCommercial, + dataset_NorthAmericaMushrooms, dataset_openPoetryVision, + dataset_OxfordPets_by_breed, dataset_OxfordPets_by_species, dataset_PKLot, + dataset_Packages, dataset_PascalVOC, dataset_pistols, dataset_plantdoc, + dataset_pothole, dataset_Raccoon, dataset_selfdrivingCar, + dataset_ShellfishOpenImages, dataset_ThermalCheetah, + dataset_thermalDogsAndPeople, dataset_UnoCards, dataset_VehiclesOpenImages, + dataset_WildfireSmoke, dataset_websiteScreenshots +] + +metrics = [ + val_evaluator_AerialMaritimeDrone_large, + val_evaluator_AerialMaritimeDrone_tiled, + val_evaluator_AmericanSignLanguageLetters, val_evaluator_Aquarium, + val_evaluator_BCCD, val_evaluator_boggleBoards, + val_evaluator_brackishUnderwater, val_evaluator_ChessPieces, + val_evaluator_CottontailRabbits, val_evaluator_dice, + val_evaluator_DroneControl, val_evaluator_EgoHands_generic, + val_evaluator_EgoHands_specific, val_evaluator_HardHatWorkers, + val_evaluator_MaskWearing, val_evaluator_MountainDewCommercial, + val_evaluator_NorthAmericaMushrooms, val_evaluator_openPoetryVision, + val_evaluator_OxfordPets_by_breed, val_evaluator_OxfordPets_by_species, + val_evaluator_PKLot, val_evaluator_Packages, val_evaluator_PascalVOC, + val_evaluator_pistols, val_evaluator_plantdoc, val_evaluator_pothole, + val_evaluator_Raccoon, val_evaluator_selfdrivingCar, + val_evaluator_ShellfishOpenImages, val_evaluator_ThermalCheetah, + val_evaluator_thermalDogsAndPeople, val_evaluator_UnoCards, + val_evaluator_VehiclesOpenImages, val_evaluator_WildfireSmoke, + val_evaluator_websiteScreenshots +] + +# -------------------------------------------------# +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/override_category.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/override_category.py new file mode 100644 index 0000000000000000000000000000000000000000..9ff05fc6e5e4d0989cf7fcf7af4dc902ee99f3a3 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/odinw/override_category.py @@ -0,0 +1,109 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import argparse + +import mmengine + + +def parse_args(): + parser = argparse.ArgumentParser(description='Override Category') + parser.add_argument('data_root') + return parser.parse_args() + + +def main(): + args = parse_args() + + ChessPieces = [{ + 'id': 1, + 'name': ' ', + 'supercategory': 'pieces' + }, { + 'id': 2, + 'name': 'black bishop', + 'supercategory': 'pieces' + }, { + 'id': 3, + 'name': 'black king', + 'supercategory': 'pieces' + }, { + 'id': 4, + 'name': 'black knight', + 'supercategory': 'pieces' + }, { + 'id': 5, + 'name': 'black pawn', + 'supercategory': 'pieces' + }, { + 'id': 6, + 'name': 'black queen', + 'supercategory': 'pieces' + }, { + 'id': 7, + 'name': 'black rook', + 'supercategory': 'pieces' + }, { + 'id': 8, + 'name': 'white bishop', + 'supercategory': 'pieces' + }, { + 'id': 9, + 'name': 'white king', + 'supercategory': 'pieces' + }, { + 'id': 10, + 'name': 'white knight', + 'supercategory': 'pieces' + }, { + 'id': 11, + 'name': 'white pawn', + 'supercategory': 'pieces' + }, { + 'id': 12, + 'name': 'white queen', + 'supercategory': 'pieces' + }, { + 'id': 13, + 'name': 'white rook', + 'supercategory': 'pieces' + }] + + _data_root = args.data_root + 'ChessPieces/Chess Pieces.v23-raw.coco/' + json_data = mmengine.load(_data_root + + 'valid/annotations_without_background.json') + json_data['categories'] = ChessPieces + mmengine.dump(json_data, + _data_root + 'valid/new_annotations_without_background.json') + + CottontailRabbits = [{ + 'id': 1, + 'name': 'rabbit', + 'supercategory': 'Cottontail-Rabbit' + }] + + _data_root = args.data_root + 'CottontailRabbits/' + json_data = mmengine.load(_data_root + + 'valid/annotations_without_background.json') + json_data['categories'] = CottontailRabbits + mmengine.dump(json_data, + _data_root + 'valid/new_annotations_without_background.json') + + NorthAmericaMushrooms = [{ + 'id': 1, + 'name': 'flat mushroom', + 'supercategory': 'mushroom' + }, { + 'id': 2, + 'name': 'yellow mushroom', + 'supercategory': 'mushroom' + }] + + _data_root = args.data_root + 'NorthAmericaMushrooms/North American Mushrooms.v1-416x416.coco/' # noqa + json_data = mmengine.load(_data_root + + 'valid/annotations_without_background.json') + json_data['categories'] = NorthAmericaMushrooms + mmengine.dump(json_data, + _data_root + 'valid/new_annotations_without_background.json') + + +if __name__ == '__main__': + main() diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/people_in_painting/grounding_dino_swin-t_finetune_8xb4_50e_people_in_painting.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/people_in_painting/grounding_dino_swin-t_finetune_8xb4_50e_people_in_painting.py new file mode 100644 index 0000000000000000000000000000000000000000..449d8682f896c3857e6a50b16a13b43acc77ebc2 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/people_in_painting/grounding_dino_swin-t_finetune_8xb4_50e_people_in_painting.py @@ -0,0 +1,109 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +# https://universe.roboflow.com/roboflow-100/people-in-paintings/dataset/2 +data_root = 'data/people_in_painting_v2/' +class_name = ('Human', ) +palette = [(220, 20, 60)] + +metainfo = dict(classes=class_name, palette=palette) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + sampler=dict(_delete_=True, type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='RepeatDataset', + times=10, + dataset=dict( + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline, + return_classes=True, + data_prefix=dict(img='train/'), + ann_file='train/_annotations.coco.json'))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + return_classes=True, + ann_file='valid/_annotations.coco.json', + data_prefix=dict(img='valid/'))) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'valid/_annotations.coco.json', + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict(custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1) + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[4], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_grefcoco.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_grefcoco.py new file mode 100644 index 0000000000000000000000000000000000000000..983ffe5c6f3f6e59cf1616a0b22c17f065e08437 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_grefcoco.py @@ -0,0 +1,170 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + # change this + dict(type='RandomFlip', prob=0.0), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ODVGDataset', + data_root=data_root, + ann_file='mdetr_annotations/finetune_grefcoco_train_vg.json', + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_val.json' +val_dataset_all_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) +val_evaluator_all_val = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_testA.json' +val_dataset_refcoco_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testA = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_testB.json' +val_dataset_refcoco_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testB = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +datasets = [ + val_dataset_all_val, val_dataset_refcoco_testA, val_dataset_refcoco_testB +] +dataset_prefixes = ['grefcoco_val', 'grefcoco_testA', 'grefcoco_testB'] +metrics = [ + val_evaluator_all_val, val_evaluator_refcoco_testA, + val_evaluator_refcoco_testB +] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[3], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco.py new file mode 100644 index 0000000000000000000000000000000000000000..d91af473a239f2f48a09a272d926e00c52da987b --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco.py @@ -0,0 +1,167 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + # change this + dict(type='RandomFlip', prob=0.0), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ODVGDataset', + data_root=data_root, + ann_file='mdetr_annotations/finetune_refcoco_train_vg.json', + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco_val.json' +val_dataset_all_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) +val_evaluator_all_val = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco_testA.json' +val_dataset_refcoco_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testA = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco_testB.json' +val_dataset_refcoco_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testB = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +datasets = [ + val_dataset_all_val, val_dataset_refcoco_testA, val_dataset_refcoco_testB +] +dataset_prefixes = ['refcoco_val', 'refcoco_testA', 'refcoco_testB'] +metrics = [ + val_evaluator_all_val, val_evaluator_refcoco_testA, + val_evaluator_refcoco_testB +] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[3], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco_plus.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco_plus.py new file mode 100644 index 0000000000000000000000000000000000000000..871adc8efb48532fb5e0fbfa07e6019c37911712 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcoco_plus.py @@ -0,0 +1,167 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + # change this + dict(type='RandomFlip', prob=0.0), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ODVGDataset', + data_root=data_root, + ann_file='mdetr_annotations/finetune_refcoco+_train_vg.json', + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco+_val.json' +val_dataset_all_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) +val_evaluator_all_val = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco+_testA.json' +val_dataset_refcoco_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testA = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco+_testB.json' +val_dataset_refcoco_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testB = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +datasets = [ + val_dataset_all_val, val_dataset_refcoco_testA, val_dataset_refcoco_testB +] +dataset_prefixes = ['refcoco+_val', 'refcoco+_testA', 'refcoco+_testB'] +metrics = [ + val_evaluator_all_val, val_evaluator_refcoco_testA, + val_evaluator_refcoco_testB +] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[3], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcocog.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcocog.py new file mode 100644 index 0000000000000000000000000000000000000000..a351d6f9d123fc8f2000990a5e6d02adbb3eb2fa --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_finetune_8xb4_5e_refcocog.py @@ -0,0 +1,145 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/coco/' + +train_pipeline = [ + dict(type='LoadImageFromFile', backend_args=_base_.backend_args), + dict(type='LoadAnnotations', with_bbox=True), + # change this + dict(type='RandomFlip', prob=0.0), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)), + dict( + type='RandomSamplingNegPos', + tokenizer_name=_base_.lang_model_name, + num_sample_negative=85, + max_tokens=256), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities', 'tokens_positive', 'dataset_mode')) +] + +train_dataloader = dict( + dataset=dict( + _delete_=True, + type='ODVGDataset', + data_root=data_root, + ann_file='mdetr_annotations/finetune_refcocog_train_vg.json', + data_prefix=dict(img='train2014/'), + filter_cfg=dict(filter_empty_gt=False, min_size=32), + return_classes=True, + pipeline=train_pipeline)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcocog_val.json' +val_dataset_all_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) +val_evaluator_all_val = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcocog_test.json' +val_dataset_refcoco_test = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=_base_.test_pipeline, + backend_args=None) + +val_evaluator_refcoco_test = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +datasets = [val_dataset_all_val, val_dataset_refcoco_test] +dataset_prefixes = ['refcocog_val', 'refcocog_test'] +metrics = [val_evaluator_all_val, val_evaluator_refcoco_test] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0002, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict( + custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1), + # 'language_model': dict(lr_mult=0), + })) + +# learning policy +max_epochs = 5 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[3], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) + +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py new file mode 100644 index 0000000000000000000000000000000000000000..437d71c6b357eda85d13b5efd4c81d4d32f91120 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp.py @@ -0,0 +1,228 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +# 30 is an empirical value, just set it to the maximum value +# without affecting the evaluation result +model = dict(test_cfg=dict(max_per_img=30)) + +data_root = 'data/coco/' + +test_pipeline = [ + dict( + type='LoadImageFromFile', backend_args=None, + imdecode_backend='pillow'), + dict( + type='FixScaleResize', + scale=(800, 1333), + keep_ratio=True, + backend='pillow'), + dict(type='LoadAnnotations', with_bbox=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'text', 'custom_entities', + 'tokens_positive')) +] + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/final_refexp_val.json' +val_dataset_all_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) +val_evaluator_all_val = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco_testA.json' +val_dataset_refcoco_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testA = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco_testB.json' +val_dataset_refcoco_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_refcoco_testB = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco+_testA.json' +val_dataset_refcoco_plus_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_refcoco_plus_testA = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcoco+_testB.json' +val_dataset_refcoco_plus_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_refcoco_plus_testB = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_refcocog_test.json' +val_dataset_refcocog_test = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_refcocog_test = dict( + type='RefExpMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + topk=(1, 5, 10)) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_val.json' +val_dataset_grefcoco_val = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_grefcoco_val = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_testA.json' +val_dataset_grefcoco_testA = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_grefcoco_testA = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +ann_file = 'mdetr_annotations/finetune_grefcoco_testB.json' +val_dataset_grefcoco_testB = dict( + type='MDETRStyleRefCocoDataset', + data_root=data_root, + ann_file=ann_file, + data_prefix=dict(img='train2014/'), + test_mode=True, + return_classes=True, + pipeline=test_pipeline, + backend_args=None) + +val_evaluator_grefcoco_testB = dict( + type='gRefCOCOMetric', + ann_file=data_root + ann_file, + metric='bbox', + iou_thrs=0.5, + thresh_score=0.7, + thresh_f1=1.0) + +# -------------------------------------------------# +datasets = [ + val_dataset_all_val, val_dataset_refcoco_testA, val_dataset_refcoco_testB, + val_dataset_refcoco_plus_testA, val_dataset_refcoco_plus_testB, + val_dataset_refcocog_test, val_dataset_grefcoco_val, + val_dataset_grefcoco_testA, val_dataset_grefcoco_testB +] +dataset_prefixes = [ + 'val', 'refcoco_testA', 'refcoco_testB', 'refcoco+_testA', + 'refcoco+_testB', 'refcocog_test', 'grefcoco_val', 'grefcoco_testA', + 'grefcoco_testB' +] +metrics = [ + val_evaluator_all_val, val_evaluator_refcoco_testA, + val_evaluator_refcoco_testB, val_evaluator_refcoco_plus_testA, + val_evaluator_refcoco_plus_testB, val_evaluator_refcocog_test, + val_evaluator_grefcoco_val, val_evaluator_grefcoco_testA, + val_evaluator_grefcoco_testB +] + +val_dataloader = dict( + dataset=dict(_delete_=True, type='ConcatDataset', datasets=datasets)) +test_dataloader = val_dataloader + +val_evaluator = dict( + _delete_=True, + type='MultiDatasetsEvaluator', + metrics=metrics, + dataset_prefixes=dataset_prefixes) +test_evaluator = val_evaluator diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/rtts/grounding_dino_swin-t_finetune_8xb4_1x_rtts.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/rtts/grounding_dino_swin-t_finetune_8xb4_1x_rtts.py new file mode 100644 index 0000000000000000000000000000000000000000..95c2be058e2c407fc92de93f4b79ec8b36e25c18 --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/rtts/grounding_dino_swin-t_finetune_8xb4_1x_rtts.py @@ -0,0 +1,106 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/RTTS/' +class_name = ('bicycle', 'bus', 'car', 'motorbike', 'person') +palette = [(255, 97, 0), (0, 201, 87), (176, 23, 31), (138, 43, 226), + (30, 144, 255)] + +metainfo = dict(classes=class_name, palette=palette) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + sampler=dict(_delete_=True, type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline, + return_classes=True, + ann_file='annotations_json/rtts_train.json', + data_prefix=dict(img=''))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + return_classes=True, + ann_file='annotations_json/rtts_val.json', + data_prefix=dict(img=''))) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations_json/rtts_val.json', + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict(custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1) + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/ruod/grounding_dino_swin-t_finetune_8xb4_1x_ruod.py b/grounding-dino/mmdetection/configs/mm_grounding_dino/ruod/grounding_dino_swin-t_finetune_8xb4_1x_ruod.py new file mode 100644 index 0000000000000000000000000000000000000000..f57682b29d970fb6d46c2f459f773b03e803695d --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/ruod/grounding_dino_swin-t_finetune_8xb4_1x_ruod.py @@ -0,0 +1,108 @@ +_base_ = '../grounding_dino_swin-t_pretrain_obj365.py' + +data_root = 'data/RUOD/' +class_name = ('holothurian', 'echinus', 'scallop', 'starfish', 'fish', + 'corals', 'diver', 'cuttlefish', 'turtle', 'jellyfish') +palette = [(235, 211, 70), (106, 90, 205), (160, 32, 240), (176, 23, 31), + (142, 0, 0), (230, 0, 0), (106, 0, 228), (60, 100, 0), (80, 100, 0), + (70, 0, 0)] + +metainfo = dict(classes=class_name, palette=palette) + +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='RandomFlip', prob=0.5), + dict( + type='RandomChoice', + transforms=[ + [ + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ], + [ + dict( + type='RandomChoiceResize', + # The radio of all image in train dataset < 7 + # follow the original implement + scales=[(400, 4200), (500, 4200), (600, 4200)], + keep_ratio=True), + dict( + type='RandomCrop', + crop_type='absolute_range', + crop_size=(384, 600), + allow_negative_crop=True), + dict( + type='RandomChoiceResize', + scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333), + (608, 1333), (640, 1333), (672, 1333), (704, 1333), + (736, 1333), (768, 1333), (800, 1333)], + keep_ratio=True) + ] + ]), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor', 'flip', 'flip_direction', 'text', + 'custom_entities')) +] + +train_dataloader = dict( + sampler=dict(_delete_=True, type='DefaultSampler', shuffle=True), + batch_sampler=dict(type='AspectRatioBatchSampler'), + dataset=dict( + _delete_=True, + type='CocoDataset', + data_root=data_root, + metainfo=metainfo, + filter_cfg=dict(filter_empty_gt=False, min_size=32), + pipeline=train_pipeline, + return_classes=True, + ann_file='RUOD_ANN/instances_train.json', + data_prefix=dict(img='RUOD_pic/train/'))) + +val_dataloader = dict( + dataset=dict( + metainfo=metainfo, + data_root=data_root, + return_classes=True, + ann_file='RUOD_ANN/instances_test.json', + data_prefix=dict(img='RUOD_pic/test/'))) +test_dataloader = val_dataloader + +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'RUOD_ANN/instances_test.json', + metric='bbox', + format_only=False) +test_evaluator = val_evaluator + +optim_wrapper = dict( + _delete_=True, + type='OptimWrapper', + optimizer=dict(type='AdamW', lr=0.0001, weight_decay=0.0001), + clip_grad=dict(max_norm=0.1, norm_type=2), + paramwise_cfg=dict(custom_keys={ + 'absolute_pos_embed': dict(decay_mult=0.), + 'backbone': dict(lr_mult=0.1) + })) + +# learning policy +max_epochs = 12 +param_scheduler = [ + dict( + type='MultiStepLR', + begin=0, + end=max_epochs, + by_epoch=True, + milestones=[11], + gamma=0.1) +] +train_cfg = dict(max_epochs=max_epochs, val_interval=1) +default_hooks = dict(checkpoint=dict(max_keep_ckpts=1, save_best='auto')) + +load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/usage.md b/grounding-dino/mmdetection/configs/mm_grounding_dino/usage.md new file mode 100644 index 0000000000000000000000000000000000000000..123c6638cbea2cad01d935994f08eab252f35cbf --- /dev/null +++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/usage.md @@ -0,0 +1,491 @@ +# Usage + +## Install + +After installing MMDet according to the instructions in the [get_started](../../docs/zh_cn/get_started.md) section, you need to install additional dependency packages: + +```shell +cd $MMDETROOT + +pip install -r requirements/multimodal.txt +pip install emoji ddd-dataset +pip install git+https://github.com/lvis-dataset/lvis-api.git" +``` + +Please note that since the LVIS third-party library does not currently support numpy 1.24, ensure that your numpy version meets the requirements. It is recommended to install numpy version 1.23. + +## Instructions + +### Download BERT Weight + +MM Grounding DINO uses BERT as its language model and requires access to https://huggingface.co/. If you encounter connection errors due to network access issues, you can download the necessary files on a computer with network access and save them locally. Finally, modify the `lang_model_name` field in the configuration file to the local path. For specific instructions, please refer to the following code: + +```python +from transformers import BertConfig, BertModel +from transformers import AutoTokenizer + +config = BertConfig.from_pretrained("bert-base-uncased") +model = BertModel.from_pretrained("bert-base-uncased", add_pooling_layer=False, config=config) +tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased") + +config.save_pretrained("your path/bert-base-uncased") +model.save_pretrained("your path/bert-base-uncased") +tokenizer.save_pretrained("your path/bert-base-uncased") +``` + +### Download NLTK Weight + +When MM Grounding DINO performs Phrase Grounding inference, it may extract noun phrases. Although it downloads specific models at runtime, considering that some users' running environments cannot connect to the internet, it is possible to download them in advance to the `~/nltk_data` path. + +```python +import nltk +nltk.download('punkt', download_dir='~/nltk_data') +nltk.download('averaged_perceptron_tagger', download_dir='~/nltk_data') +``` + +### Download MM Grounding DINO-T Weight + +For convenience in demonstration, you can download the MM Grounding DINO-T model weights in advance to the current path. + +```shell +wget load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa +``` + +## Inference + +Before inference, for a better experience of the inference effects on different images, it is recommended that you first download [these images](https://github.com/microsoft/X-Decoder/tree/main/inference_demo/images) to the current path. + +MM Grounding DINO supports four types of inference methods: Closed-Set Object Detection, Open Vocabulary Object Detection, Phrase Grounding, and Referential Expression Comprehension. The details are explained below. + +**(1) Closed-Set Object Detection** + +Since MM Grounding DINO is a pretrained model, it can theoretically be applied to any closed-set detection dataset. Currently, we support commonly used datasets such as coco/voc/cityscapes/objects365v1/lvis, etc. Below, we will use coco as an example. + +```shell +python demo/image_demo.py images/animals.png \ + configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \ + --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \ + --texts '$: coco' +``` + +The predictions for `outputs/vis/animals.png` will be generated in the current directory, as shown in the following image. + +
+ +
+
+
+Since ostrich is not one of the 80 classes in COCO, it will not be detected.
+
+It's important to note that Objects365v1 and LVIS have a large number of categories. If you try to input all category names directly into the network, it may exceed 256 tokens, leading to poor model predictions. In such cases, you can use the `--chunked-size` parameter to perform chunked predictions. However, please be aware that chunked predictions may take longer to complete due to the large number of categories.
+
+```shell
+python demo/image_demo.py images/animals.png \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts '$: lvis' --chunked-size 70 \
+ --palette random
+```
+
+
+ +
+
+
+Different `--chunked-size` values can lead to different prediction results. You can experiment with different chunked sizes to find the one that works best for your specific task and dataset.
+
+**(2) Open Vocabulary Object Detection**
+
+Open vocabulary object detection refers to the ability to input arbitrary class names during inference.
+
+```shell
+python demo/image_demo.py images/animals.png \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'zebra. giraffe' -c
+```
+
+
+ +
+
+
+**(3) Phrase Grounding**
+
+Phrase Grounding refers to the process where a user inputs a natural language description, and the model automatically detects the corresponding bounding boxes for the mentioned noun phrases. It can be used in two ways:
+
+1. Automatically extracting noun phrases using the NLTK library and then performing detection.
+
+```shell
+python demo/image_demo.py images/apples.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'There are many apples here.'
+```
+
+
+ +
+
+
+The program will automatically split `many apples` as a noun phrase and then detect the corresponding objects. Different input descriptions can have a significant impact on the prediction results.
+
+2. Users can manually specify which parts of the sentence are noun phrases to avoid errors in NLTK extraction.
+
+```shell
+python demo/image_demo.py images/fruit.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'The picture contains watermelon, flower, and a white bottle.' \
+ --tokens-positive "[[[21,31]], [[45,59]]]" --pred-score-thr 0.12
+```
+
+The noun phrase corresponding to positions 21-31 is `watermelon`, and the noun phrase corresponding to positions 45-59 is `a white bottle`.
+
+
+ +
+
+
+**(4) Referential Expression Comprehension**
+
+Referential expression understanding refers to the model automatically comprehending the referential expressions involved in a user's language description without the need for noun phrase extraction.
+
+```shell
+python demo/image_demo.py images/apples.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'red apple.' \
+ --tokens-positive -1
+```
+
+
+ +
+
+
+## Evaluation
+
+Our provided evaluation scripts are unified, and you only need to prepare the data in advance and then run the relevant configuration.
+
+(1) Zero-Shot COCO2017 val
+
+```shell
+# single GPU
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+
+# 8 GPUs
+./tools/dist_test.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth 8
+```
+
+(2) Zero-Shot ODinW13
+
+```shell
+# single GPU
+python tools/test.py configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+
+# 8 GPUs
+./tools/dist_test.sh configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth 8
+```
+
+## Visualization of Evaluation Results
+
+For the convenience of visualizing and analyzing model prediction results, we provide support for visualizing evaluation dataset prediction results. Taking referential expression understanding as an example, the usage is as follows:
+
+```shell
+python tools/test.py configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth --work-dir refcoco_result --show-dir save_path
+```
+
+During the inference process, it will save the visualization results to the `refcoco_result/{current_timestamp}/save_path` directory. For other evaluation dataset visualizations, you only need to replace the configuration file.
+
+Here are some visualization results for various datasets. The left image represents the Ground Truth (GT). The right image represents the Predicted Result.
+
+1. COCO2017 val Results:
+
+
+ +
+
+
+2. Flickr30k Entities Results:
+
+
+ +
+
+
+3. DOD Results:
+
+
+ +
+
+
+4. RefCOCO val Results:
+
+
+ +
+
+
+5. RefCOCO testA Results:
+
+
+ +
+
+
+6. gRefCOCO val Results:
+
+
+ +
+
+
+## Training
+
+If you want to reproduce our results, you can train the model by using the following command after preparing the dataset:
+
+```shell
+# Training on a single machine with 8 GPUs for obj365v1 dataset
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py 8
+# Training on a single machine with 8 GPUs for datasets like obj365v1, goldg, grit, v3det, and other datasets is similar.
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py 8
+```
+
+For multi-machine training, please refer to [train.md](../../docs/zh_cn/user_guides/train.md). The MM-Grounding-DINO T model is designed to work with 32 GPUs (specifically, 3090Ti GPUs). If your total batch size is not 32x4=128, you will need to manually adjust the learning rate accordingly.
+
+### Pretraining Custom Format Explanation
+
+In order to standardize the pretraining formats for different datasets, we refer to the format design proposed by [Open-GroundingDino](https://github.com/longzw1997/Open-GroundingDino). Specifically, it is divided into two formats.
+
+**(1) Object Detection Format (OD)**
+
+```text
+{"filename": "obj365_train_000000734304.jpg",
+ "height": 512,
+ "width": 769,
+ "detection": {
+ "instances": [
+ {"bbox": [109.4768676992, 346.0190429696, 135.1918335098, 365.3641967616], "label": 2, "category": "chair"},
+ {"bbox": [58.612365705900004, 323.2281494016, 242.6005859067, 451.4166870016], "label": 8, "category": "car"}
+ ]
+ }
+}
+```
+
+The numerical values corresponding to labels in the label dictionary should match the respective label_map. Each item in the instances list corresponds to a bounding box (in the format x1y1x2y2).
+
+**(2) Phrase Grounding Format (VG)**
+
+```text
+{"filename": "2405116.jpg",
+ "height": 375,
+ "width": 500,
+ "grounding":
+ {"caption": "Two surfers walking down the shore. sand on the beach.",
+ "regions": [
+ {"bbox": [206, 156, 282, 248], "phrase": "Two surfers", "tokens_positive": [[0, 3], [4, 11]]},
+ {"bbox": [303, 338, 443, 343], "phrase": "sand", "tokens_positive": [[36, 40]]},
+ {"bbox": [[327, 223, 421, 282], [300, 200, 400, 210]], "phrase": "beach", "tokens_positive": [[48, 53]]}
+ ]
+ }
+```
+
+The `tokens_positive` field indicates the character positions of the current phrase within the caption.
+
+## Example of Fine-tuning Custom Dataset
+
+In order to facilitate downstream fine-tuning on custom datasets, we have provided a fine-tuning example using the simple "cat" dataset as an illustration.
+
+### 1 Data Preparation
+
+```shell
+cd mmdetection
+wget https://download.openmmlab.com/mmyolo/data/cat_dataset.zip
+unzip cat_dataset.zip -d data/cat/
+```
+
+The "cat" dataset is a single-category dataset consisting of 144 images, already converted to the COCO format.
+
+
+
+
+
+### 2 Configuration Preparation
+
+Due to the simplicity and small size of the "cat" dataset, we trained it for 20 epochs using 8 GPUs, with corresponding learning rate scaling. We did not train the language model, only the visual model.
+
+Detailed configuration information can be found in [grounding_dino_swin-t_finetune_8xb4_20e_cat](grounding_dino_swin-t_finetune_8xb4_20e_cat.py).
+
+### 3 Visualization and Evaluation of Zero-Shot Results
+
+Due to MM Grounding DINO being an open-set detection model, you can perform detection and evaluation even if it was not trained on the cat dataset.
+
+Visualization of a single image:
+
+```shell
+cd mmdetection
+python demo/image_demo.py data/cat/images/IMG_20211205_120756.jpg configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth --texts cat.
+```
+
+Evaluation results of Zero-shot on test dataset:
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.881
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.929
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.881
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.913
+```
+
+### 4 Fine-tuning
+
+```shell
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py 8 --work-dir cat_work_dir
+```
+
+The model will save the best-performing checkpoint. It achieved its best performance at the 16th epoch, with the following results:
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.901
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.930
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.901
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.967
+```
+
+We can observe that after fine-tuning, the training performance on the cat dataset improved from 88.1 to 90.1. However, due to the small dataset size, the evaluation metrics show some fluctuations.
+
+## Iterative Generation and Optimization Pipeline of Model Self-training Pseduo Label
+
+To facilitate users in creating their own datasets from scratch or those who want to leverage the model's inference capabilities for iterative pseudo-label generation and optimization, continuously modifying pseudo-labels to improve model performance, we have provided relevant pipelines.
+
+Since we have defined two data formats, we will provide separate explanations for demonstration purposes.
+
+### 1 Object Detection Format
+
+Here, we continue to use the aforementioned cat dataset as an example. Let's assume that we currently have a series of images and predefined categories but no annotations.
+
+1. Generate initial `odvg` format file
+
+```python
+import os
+import cv2
+import json
+import jsonlines
+
+data_root = 'data/cat'
+images_path = os.path.join(data_root, 'images')
+out_path = os.path.join(data_root, 'cat_train_od.json')
+metas = []
+for files in os.listdir(images_path):
+ img = cv2.imread(os.path.join(images_path, files))
+ height, width, _ = img.shape
+ metas.append({"filename": files, "height": height, "width": width})
+
+with jsonlines.open(out_path, mode='w') as writer:
+ writer.write_all(metas)
+
+# 生成 label_map.json,由于只有一个类别,所以只需要写一个 cat 即可
+label_map_path = os.path.join(data_root, 'cat_label_map.json')
+with open(label_map_path, 'w') as f:
+ json.dump({'0': 'cat'}, f)
+```
+
+Two files, `cat_train_od.json` and `cat_label_map.json`, will be generated in the `data/cat` directory.
+
+2. Inference with pre-trained model and save the results
+
+We provide a readily usable [configuration](grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py). If you are using a different dataset, you can refer to this configuration for modifications.
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+A new file `cat_train_od_v1.json` will be generated in the `data/cat` directory. You can manually open it to confirm or use the provided [script](../../tools/analysis_tools/browse_grounding_raw.py) to visualize the results.
+
+```shell
+python tools/analysis_tools/browse_grounding_raw.py data/cat/ cat_train_od_v1.json images --label-map-file cat_label_map.json -o your_output_dir --not-show
+```
+
+The visualization results will be generated in the `your_output_dir` directory.
+
+3. Continue training to boost performance
+
+After obtaining pseudo-labels, you can mix them with some pre-training data for further pre-training to improve the model's performance on the current dataset. Then, you can repeat step 2 to obtain more accurate pseudo-labels, and continue this iterative process.
+
+### 2 Phrase Grounding Format
+
+1. Generate initial `odvg` format file
+
+The bootstrapping process of Phrase Grounding requires providing captions corresponding to each image and pre-segmented phrase information initially. Taking flickr30k entities images as an example, the generated typical file should look like this:
+
+```text
+[
+{"filename": "3028766968.jpg",
+ "height": 375,
+ "width": 500,
+ "grounding":
+ {"caption": "Man with a black shirt on sit behind a desk sorting threw a giant stack of people work with a smirk on his face .",
+ "regions": [
+ {"bbox": [0, 0, 1, 1], "phrase": "a giant stack of people", "tokens_positive": [[58, 81]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "a black shirt", "tokens_positive": [[9, 22]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "a desk", "tokens_positive": [[37, 43]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "his face", "tokens_positive": [[103, 111]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "Man", "tokens_positive": [[0, 3]]}]}}
+{"filename": "6944134083.jpg",
+ "height": 319,
+ "width": 500,
+ "grounding":
+ {"caption": "Two men are competing in a horse race .",
+ "regions": [
+ {"bbox": [0, 0, 1, 1], "phrase": "Two men", "tokens_positive": [[0, 7]]}]}}
+]
+```
+
+Bbox needs to be set to `[0, 0, 1, 1]` for initialization to make sure the programme could run, but this value would not be utilized.
+
+```text
+{"filename": "3028766968.jpg", "height": 375, "width": 500, "grounding": {"caption": "Man with a black shirt on sit behind a desk sorting threw a giant stack of people work with a smirk on his face .", "regions": [{"bbox": [0, 0, 1, 1], "phrase": "a giant stack of people", "tokens_positive": [[58, 81]]}, {"bbox": [0, 0, 1, 1], "phrase": "a black shirt", "tokens_positive": [[9, 22]]}, {"bbox": [0, 0, 1, 1], "phrase": "a desk", "tokens_positive": [[37, 43]]}, {"bbox": [0, 0, 1, 1], "phrase": "his face", "tokens_positive": [[103, 111]]}, {"bbox": [0, 0, 1, 1], "phrase": "Man", "tokens_positive": [[0, 3]]}]}}
+{"filename": "6944134083.jpg", "height": 319, "width": 500, "grounding": {"caption": "Two men are competing in a horse race .", "regions": [{"bbox": [0, 0, 1, 1], "phrase": "Two men", "tokens_positive": [[0, 7]]}]}}
+```
+
+You can directly copy the text above, and assume that the text content is pasted into a file named `flickr_simple_train_vg.json`, which is placed in the pre-prepared `data/flickr30k_entities` dataset directory, as detailed in the data preparation document.
+
+2. Inference with pre-trained model and save the results
+
+We provide a directly usable [configuration](https://chat.openai.com/c/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py). If you are using a different dataset, you can refer to this configuration for modifications.
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+The translation of your text from Chinese to English is: "A new file `flickr_simple_train_vg_v1.json` will be generated in the `data/flickr30k_entities` directory. You can manually open it to confirm or use the [script](../../tools/analysis_tools/browse_grounding_raw.py) to visualize the effects
+
+```shell
+python tools/analysis_tools/browse_grounding_raw.py data/flickr30k_entities/ flickr_simple_train_vg_v1.json flickr30k_images -o your_output_dir --not-show
+```
+
+The visualization results will be generated in the `your_output_dir` directory, as shown in the following image:
+
+
+
+ +
+
+
+3. Continue training to boost performance
+
+After obtaining the pseudo-labels, you can mix some pre-training data to continue pre-training jointly, which enhances the model's performance on the current dataset. Then, rerun step 2 to obtain more accurate pseudo-labels, and repeat this cycle iteratively.
diff --git a/grounding-dino/mmdetection/configs/mm_grounding_dino/usage_zh-CN.md b/grounding-dino/mmdetection/configs/mm_grounding_dino/usage_zh-CN.md
new file mode 100644
index 0000000000000000000000000000000000000000..5f625ea6ca8dc09225aebbe00c424fc0128cf736
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/mm_grounding_dino/usage_zh-CN.md
@@ -0,0 +1,491 @@
+# 用法说明
+
+## 安装
+
+在按照 [get_started](../../docs/zh_cn/get_started.md) 一节的说明安装好 MMDet 之后,需要安装额外的依赖包:
+
+```shell
+cd $MMDETROOT
+
+pip install -r requirements/multimodal.txt
+pip install emoji ddd-dataset
+pip install git+https://github.com/lvis-dataset/lvis-api.git"
+```
+
+请注意由于 LVIS 第三方库暂时不支持 numpy 1.24,因此请确保您的 numpy 版本符合要求。建议安装 numpy 1.23 版本。
+
+## 说明
+
+### BERT 权重下载
+
+MM Grounding DINO 采用了 BERT 作为语言模型,需要访问 https://huggingface.co/, 如果您因为网络访问问题遇到连接错误,可以在有网络访问权限的电脑上下载所需文件并保存在本地。最后,修改配置文件中的 `lang_model_name` 字段为本地路径即可。具体请参考以下代码:
+
+```python
+from transformers import BertConfig, BertModel
+from transformers import AutoTokenizer
+
+config = BertConfig.from_pretrained("bert-base-uncased")
+model = BertModel.from_pretrained("bert-base-uncased", add_pooling_layer=False, config=config)
+tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased")
+
+config.save_pretrained("your path/bert-base-uncased")
+model.save_pretrained("your path/bert-base-uncased")
+tokenizer.save_pretrained("your path/bert-base-uncased")
+```
+
+### NLTK 权重下载
+
+MM Grounding DINO 在进行 Phrase Grounding 推理时候可能会进行名词短语提取,虽然会在运行时候下载特定的模型,但是考虑到有些用户运行环境无法联网,因此可以提前下载到 `~/nltk_data` 路径下
+
+```python
+import nltk
+nltk.download('punkt', download_dir='~/nltk_data')
+nltk.download('averaged_perceptron_tagger', download_dir='~/nltk_data')
+```
+
+### MM Grounding DINO-T 模型权重下载
+
+为了方便演示,您可以提前下载 MM Grounding DINO-T 模型权重到当前路径下
+
+```shell
+wget load_from = 'https://download.openmmlab.com/mmdetection/v3.0/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth' # noqa
+```
+
+## 推理
+
+在推理前,为了更好的体验不同图片的推理效果,建议您先下载 [这些图片](https://github.com/microsoft/X-Decoder/tree/main/inference_demo/images) 到当前路径下
+
+MM Grounding DINO 支持了闭集目标检测,开放词汇目标检测,Phrase Grounding 和指代性表达式理解 4 种推理方式,下面详细说明。
+
+**(1) 闭集目标检测**
+
+由于 MM Grounding DINO 是预训练模型,理论上可以应用于任何闭集检测数据集,目前我们支持了常用的 coco/voc/cityscapes/objects365v1/lvis 等,下面以 coco 为例
+
+```shell
+python demo/image_demo.py images/animals.png \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts '$: coco'
+```
+
+会在当前路径下生成 `outputs/vis/animals.png` 的预测结果,如下图所示
+
+
+
+
+
+由于鸵鸟并不在 COCO 80 类中, 因此不会检测出来。
+
+需要注意,由于 objects365v1 和 lvis 类别很多,如果直接将类别名全部输入到网络中,会超过 256 个 token 导致模型预测效果极差,此时我们需要通过 `--chunked-size` 参数进行截断预测, 同时预测时间会比较长。
+
+```shell
+python demo/image_demo.py images/animals.png \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts '$: lvis' --chunked-size 70 \
+ --palette random
+```
+
+
+
+
+
+不同的 `--chunked-size` 会导致不同的预测效果,您可以自行尝试。
+
+**(2) 开放词汇目标检测**
+
+开放词汇目标检测是指在推理时候,可以输入任意的类别名
+
+```shell
+python demo/image_demo.py images/animals.png \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'zebra. giraffe' -c
+```
+
+
+
+
+
+**(3) Phrase Grounding**
+
+Phrase Grounding 是指的用户输入一句语言描述,模型自动对其涉及到的名词短语想对应的 bbox 进行检测,有两种用法
+
+1. 通过 NLTK 库自动提取名词短语,然后进行检测
+
+```shell
+python demo/image_demo.py images/apples.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'There are many apples here.'
+```
+
+
+
+
+
+程序内部会自动切分出 `many apples` 作为名词短语,然后检测出对应物体。不同的输入描述对预测结果影响很大。
+
+2. 用户自己指定句子中哪些为名词短语,避免 NLTK 提取错误的情况
+
+```shell
+python demo/image_demo.py images/fruit.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'The picture contains watermelon, flower, and a white bottle.' \
+ --tokens-positive "[[[21,31]], [[45,59]]]" --pred-score-thr 0.12
+```
+
+21,31 对应的名词短语为 `watermelon`,45,59 对应的名词短语为 `a white bottle`。
+
+
+
+
+
+**(4) 指代性表达式理解**
+
+指代性表达式理解是指的用户输入一句语言描述,模型自动对其涉及到的指代性表达式进行理解, 不需要进行名词短语提取。
+
+```shell
+python demo/image_demo.py images/apples.jpg \
+ configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth \
+ --texts 'red apple.' \
+ --tokens-positive -1
+```
+
+
+
+
+
+## 评测
+
+我们所提供的评测脚本都是统一的,你只需要提前准备好数据,然后运行相关配置就可以了
+
+(1) Zero-Shot COCO2017 val
+
+```shell
+# 单卡
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+
+# 8 卡
+./tools/dist_test.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth 8
+```
+
+(2) Zero-Shot ODinW13
+
+```shell
+# 单卡
+python tools/test.py configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+
+# 8 卡
+./tools/dist_test.sh configs/mm_grounding_dino/odinw/grounding_dino_swin-t_pretrain_odinw13.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth 8
+```
+
+## 评测数据集结果可视化
+
+为了方便大家对模型预测结果进行可视化和分析,我们支持了评测数据集预测结果可视化,以指代性表达式理解为例用法如下:
+
+```shell
+python tools/test.py configs/mm_grounding_dino/refcoco/grounding_dino_swin-t_pretrain_zeroshot_refexp \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth --work-dir refcoco_result --show-dir save_path
+```
+
+模型在推理过程中会将可视化结果保存到 `refcoco_result/{当前时间戳}/save_path` 路径下。其余评测数据集可视化只需要替换配置文件即可。
+
+下面展示一些数据集的可视化结果: 左图为 GT,右图为预测结果
+
+1. COCO2017 val 结果:
+
+
+
+
+
+2. Flickr30k Entities 结果:
+
+
+
+
+
+3. DOD 结果:
+
+
+
+
+
+4. RefCOCO val 结果:
+
+
+
+
+
+5. RefCOCO testA 结果:
+
+
+
+
+
+6. gRefCOCO val 结果:
+
+
+
+
+
+## 模型训练
+
+如果想复现我们的结果,你可以在准备好数据集后,直接通过如下命令进行训练
+
+```shell
+# 单机 8 卡训练仅包括 obj365v1 数据集
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365.py 8
+# 单机 8 卡训练包括 obj365v1/goldg/grit/v3det 数据集,其余数据集类似
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det.py 8
+```
+
+多机训练的用法请参考 [train.md](../../docs/zh_cn/user_guides/train.md)。MM-Grounding-DINO T 模型默认采用的是 32 张 3090Ti,如果你的总 bs 数不是 32x4=128,那么你需要手动的线性调整学习率。
+
+### 预训练自定义格式说明
+
+为了统一不同数据集的预训练格式,我们参考 [Open-GroundingDino](https://github.com/longzw1997/Open-GroundingDino) 所设计的格式。具体来说分成 2 种格式
+
+**(1) 目标检测数据格式 OD**
+
+```text
+{"filename": "obj365_train_000000734304.jpg",
+ "height": 512,
+ "width": 769,
+ "detection": {
+ "instances": [
+ {"bbox": [109.4768676992, 346.0190429696, 135.1918335098, 365.3641967616], "label": 2, "category": "chair"},
+ {"bbox": [58.612365705900004, 323.2281494016, 242.6005859067, 451.4166870016], "label": 8, "category": "car"}
+ ]
+ }
+}
+```
+
+label字典中所对应的数值需要和相应的 label_map 一致。 instances 列表中的每一项都对应一个 bbox (x1y1x2y2 格式)。
+
+**(2) phrase grounding 数据格式 VG**
+
+```text
+{"filename": "2405116.jpg",
+ "height": 375,
+ "width": 500,
+ "grounding":
+ {"caption": "Two surfers walking down the shore. sand on the beach.",
+ "regions": [
+ {"bbox": [206, 156, 282, 248], "phrase": "Two surfers", "tokens_positive": [[0, 3], [4, 11]]},
+ {"bbox": [303, 338, 443, 343], "phrase": "sand", "tokens_positive": [[36, 40]]},
+ {"bbox": [[327, 223, 421, 282], [300, 200, 400, 210]], "phrase": "beach", "tokens_positive": [[48, 53]]}
+ ]
+ }
+```
+
+tokens_positive 表示当前 phrase 在 caption 中的字符位置。
+
+## 自定义数据集微调训练案例
+
+为了方便用户针对自定义数据集进行下游微调,我们特意提供了以简单的 cat 数据集为例的微调训练案例。
+
+### 1 数据准备
+
+```shell
+cd mmdetection
+wget https://download.openmmlab.com/mmyolo/data/cat_dataset.zip
+unzip cat_dataset.zip -d data/cat/
+```
+
+cat 数据集是一个单类别数据集,包含 144 张图片,已经转换为 coco 格式。
+
+
+
+
+
+### 2 配置准备
+
+由于 cat 数据集的简单性和数量较少,我们使用 8 卡训练 20 个 epoch,相应的缩放学习率,不训练语言模型,只训练视觉模型。
+
+详细的配置信息可以在 [grounding_dino_swin-t_finetune_8xb4_20e_cat](grounding_dino_swin-t_finetune_8xb4_20e_cat.py) 中找到。
+
+### 3 可视化和 Zero-Shot 评估
+
+由于 MM Grounding DINO 是一个开放的检测模型,所以即使没有在 cat 数据集上训练,也可以进行检测和评估。
+
+单张图片的可视化结果如下:
+
+```shell
+cd mmdetection
+python demo/image_demo.py data/cat/images/IMG_20211205_120756.jpg configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py --weights grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth --texts cat.
+```
+
+测试集上的 Zero-Shot 评估结果如下:
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.881
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.929
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.881
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.913
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.913
+```
+
+### 4 模型训练
+
+```shell
+./tools/dist_train.sh configs/mm_grounding_dino/grounding_dino_swin-t_finetune_8xb4_20e_cat.py 8 --work-dir cat_work_dir
+```
+
+模型将会保存性能最佳的模型。在第 16 epoch 时候达到最佳,性能如下所示:
+
+```text
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.901
+ Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 1.000
+ Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.930
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.901
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.967
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = -1.000
+ Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.967
+```
+
+我们可以发现,经过微调训练后,cat 数据集的训练性能从 88.1 提升到了 90.1。同时由于数据集比较小,评估指标波动比较大。
+
+## 模型自训练伪标签迭代生成和优化 pipeline
+
+为了方便用户从头构建自己的数据集或者希望利用模型推理能力进行自举式伪标签迭代生成和优化,不断修改伪标签来提升模型性能,我们特意提供了相关的 pipeline。
+
+由于我们定义了两种数据格式,为了演示我们也将分别进行说明。
+
+### 1 目标检测格式
+
+此处我们依然采用上述的 cat 数据集为例,假设我们目前只有一系列图片和预定义的类别,并不存在标注。
+
+1. 生成初始 odvg 格式文件
+
+```python
+import os
+import cv2
+import json
+import jsonlines
+
+data_root = 'data/cat'
+images_path = os.path.join(data_root, 'images')
+out_path = os.path.join(data_root, 'cat_train_od.json')
+metas = []
+for files in os.listdir(images_path):
+ img = cv2.imread(os.path.join(images_path, files))
+ height, width, _ = img.shape
+ metas.append({"filename": files, "height": height, "width": width})
+
+with jsonlines.open(out_path, mode='w') as writer:
+ writer.write_all(metas)
+
+# 生成 label_map.json,由于只有一个类别,所以只需要写一个 cat 即可
+label_map_path = os.path.join(data_root, 'cat_label_map.json')
+with open(label_map_path, 'w') as f:
+ json.dump({'0': 'cat'}, f)
+```
+
+会在 `data/cat` 目录下生成 `cat_train_od.json` 和 `cat_label_map.json` 两个文件。
+
+2. 使用预训练模型进行推理,并保存结果
+
+我们提供了直接可用的 [配置](grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py), 如果你是其他数据集可以参考这个配置进行修改。
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_cat.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+会在 `data/cat` 目录下新生成 `cat_train_od_v1.json` 文件,你可以手动打开确认或者使用 [脚本](../../tools/analysis_tools/browse_grounding_raw.py) 可视化效果
+
+```shell
+python tools/analysis_tools/browse_grounding_raw.py data/cat/ cat_train_od_v1.json images --label-map-file cat_label_map.json -o your_output_dir --not-show
+```
+
+会在 your_output_dir 目录下生成可视化结果
+
+3. 继续训练提高性能
+
+在得到伪标签后,你可以混合一些预训练数据联合进行继续预训练,提升模型在当前数据集上的性能,然后重新运行 2 步骤,得到更准确的伪标签,如此循环迭代即可。
+
+### 2 Phrase Grounding 格式
+
+1. 生成初始 odvg 格式文件
+
+Phrase Grounding 的自举流程要求初始时候提供每张图片对应的 caption 和提前切割好的 phrase 信息。以 flickr30k entities 图片为例,生成的典型的文件应该如下所示:
+
+```text
+[
+{"filename": "3028766968.jpg",
+ "height": 375,
+ "width": 500,
+ "grounding":
+ {"caption": "Man with a black shirt on sit behind a desk sorting threw a giant stack of people work with a smirk on his face .",
+ "regions": [
+ {"bbox": [0, 0, 1, 1], "phrase": "a giant stack of people", "tokens_positive": [[58, 81]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "a black shirt", "tokens_positive": [[9, 22]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "a desk", "tokens_positive": [[37, 43]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "his face", "tokens_positive": [[103, 111]]},
+ {"bbox": [0, 0, 1, 1], "phrase": "Man", "tokens_positive": [[0, 3]]}]}}
+{"filename": "6944134083.jpg",
+ "height": 319,
+ "width": 500,
+ "grounding":
+ {"caption": "Two men are competing in a horse race .",
+ "regions": [
+ {"bbox": [0, 0, 1, 1], "phrase": "Two men", "tokens_positive": [[0, 7]]}]}}
+]
+```
+
+初始时候 bbox 必须要设置为 `[0, 0, 1, 1]`,因为这能确保程序正常运行,但是 bbox 的值并不会被使用。
+
+```text
+{"filename": "3028766968.jpg", "height": 375, "width": 500, "grounding": {"caption": "Man with a black shirt on sit behind a desk sorting threw a giant stack of people work with a smirk on his face .", "regions": [{"bbox": [0, 0, 1, 1], "phrase": "a giant stack of people", "tokens_positive": [[58, 81]]}, {"bbox": [0, 0, 1, 1], "phrase": "a black shirt", "tokens_positive": [[9, 22]]}, {"bbox": [0, 0, 1, 1], "phrase": "a desk", "tokens_positive": [[37, 43]]}, {"bbox": [0, 0, 1, 1], "phrase": "his face", "tokens_positive": [[103, 111]]}, {"bbox": [0, 0, 1, 1], "phrase": "Man", "tokens_positive": [[0, 3]]}]}}
+{"filename": "6944134083.jpg", "height": 319, "width": 500, "grounding": {"caption": "Two men are competing in a horse race .", "regions": [{"bbox": [0, 0, 1, 1], "phrase": "Two men", "tokens_positive": [[0, 7]]}]}}
+```
+
+你可直接复制上面的文本,并假设将文本内容粘贴到命名为 `flickr_simple_train_vg.json` 文件中,并放置于提前准备好的 `data/flickr30k_entities` 数据集目录下,具体见数据准备文档。
+
+2. 使用预训练模型进行推理,并保存结果
+
+我们提供了直接可用的 [配置](grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py), 如果你是其他数据集可以参考这个配置进行修改。
+
+```shell
+python tools/test.py configs/mm_grounding_dino/grounding_dino_swin-t_pretrain_pseudo-labeling_flickr30k.py \
+ grounding_dino_swin-t_pretrain_obj365_goldg_grit9m_v3det_20231204_095047-b448804b.pth
+```
+
+会在 `data/flickr30k_entities` 目录下新生成 `flickr_simple_train_vg_v1.json` 文件,你可以手动打开确认或者使用 [脚本](../../tools/analysis_tools/browse_grounding_raw.py) 可视化效果
+
+```shell
+python tools/analysis_tools/browse_grounding_raw.py data/flickr30k_entities/ flickr_simple_train_vg_v1.json flickr30k_images -o your_output_dir --not-show
+```
+
+会在 `your_output_dir` 目录下生成可视化结果,如下图所示:
+
+
+
+
+
+
+3. 继续训练提高性能
+
+在得到伪标签后,你可以混合一些预训练数据联合进行继续预训练,提升模型在当前数据集上的性能,然后重新运行 2 步骤,得到更准确的伪标签,如此循环迭代即可。
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/README.md b/grounding-dino/mmdetection/configs/ms_rcnn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..abbec9b6851ee135f61a82b82a7a58423b204b97
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/README.md
@@ -0,0 +1,36 @@
+# MS R-CNN
+
+> [Mask Scoring R-CNN](https://arxiv.org/abs/1903.00241)
+
+
+
+## Abstract
+
+Letting a deep network be aware of the quality of its own predictions is an interesting yet important problem. In the task of instance segmentation, the confidence of instance classification is used as mask quality score in most instance segmentation frameworks. However, the mask quality, quantified as the IoU between the instance mask and its ground truth, is usually not well correlated with classification score. In this paper, we study this problem and propose Mask Scoring R-CNN which contains a network block to learn the quality of the predicted instance masks. The proposed network block takes the instance feature and the corresponding predicted mask together to regress the mask IoU. The mask scoring strategy calibrates the misalignment between mask quality and mask score, and improves instance segmentation performance by prioritizing more accurate mask predictions during COCO AP evaluation. By extensive evaluations on the COCO dataset, Mask Scoring R-CNN brings consistent and noticeable gain with different models, and outperforms the state-of-the-art Mask R-CNN. We hope our simple and effective approach will provide a new direction for improving instance segmentation.
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | caffe | 1x | 4.5 | | 38.2 | 36.0 | [config](./ms-rcnn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_1x_coco/ms_rcnn_r50_caffe_fpn_1x_coco_20200702_180848-61c9355e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_1x_coco/ms_rcnn_r50_caffe_fpn_1x_coco_20200702_180848.log.json) |
+| R-50-FPN | caffe | 2x | - | - | 38.8 | 36.3 | [config](./ms-rcnn_r50-caffe_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_2x_coco/ms_rcnn_r50_caffe_fpn_2x_coco_bbox_mAP-0.388__segm_mAP-0.363_20200506_004738-ee87b137.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_2x_coco/ms_rcnn_r50_caffe_fpn_2x_coco_20200506_004738.log.json) |
+| R-101-FPN | caffe | 1x | 6.5 | | 40.4 | 37.6 | [config](./ms-rcnn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_1x_coco/ms_rcnn_r101_caffe_fpn_1x_coco_bbox_mAP-0.404__segm_mAP-0.376_20200506_004755-b9b12a37.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_1x_coco/ms_rcnn_r101_caffe_fpn_1x_coco_20200506_004755.log.json) |
+| R-101-FPN | caffe | 2x | - | - | 41.1 | 38.1 | [config](./ms-rcnn_r101-caffe_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_2x_coco/ms_rcnn_r101_caffe_fpn_2x_coco_bbox_mAP-0.411__segm_mAP-0.381_20200506_011134-5f3cc74f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_2x_coco/ms_rcnn_r101_caffe_fpn_2x_coco_20200506_011134.log.json) |
+| R-X101-32x4d | pytorch | 2x | 7.9 | 11.0 | 41.8 | 38.7 | [config](./ms-rcnn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_32x4d_fpn_1x_coco/ms_rcnn_x101_32x4d_fpn_1x_coco_20200206-81fd1740.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_32x4d_fpn_1x_coco/ms_rcnn_x101_32x4d_fpn_1x_coco_20200206_100113.log.json) |
+| R-X101-64x4d | pytorch | 1x | 11.0 | 8.0 | 43.0 | 39.5 | [config](./ms-rcnn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_1x_coco/ms_rcnn_x101_64x4d_fpn_1x_coco_20200206-86ba88d2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_1x_coco/ms_rcnn_x101_64x4d_fpn_1x_coco_20200206_091744.log.json) |
+| R-X101-64x4d | pytorch | 2x | 11.0 | 8.0 | 42.6 | 39.5 | [config](./ms-rcnn_x101-64x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_2x_coco/ms_rcnn_x101_64x4d_fpn_2x_coco_20200308-02a445e2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_2x_coco/ms_rcnn_x101_64x4d_fpn_2x_coco_20200308_012247.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{huang2019msrcnn,
+ title={Mask Scoring R-CNN},
+ author={Zhaojin Huang and Lichao Huang and Yongchao Gong and Chang Huang and Xinggang Wang},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2019},
+}
+```
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/metafile.yml b/grounding-dino/mmdetection/configs/ms_rcnn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..290f05436949c68d226d8bc2f107e480acbd6b4c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/metafile.yml
@@ -0,0 +1,159 @@
+Collections:
+ - Name: Mask Scoring R-CNN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RPN
+ - FPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/1903.00241
+ Title: 'Mask Scoring R-CNN'
+ README: configs/ms_rcnn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/mask_scoring_rcnn.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: ms-rcnn_r50-caffe_fpn_1x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.5
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_1x_coco/ms_rcnn_r50_caffe_fpn_1x_coco_20200702_180848-61c9355e.pth
+
+ - Name: ms-rcnn_r50-caffe_fpn_2x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r50_caffe_fpn_2x_coco/ms_rcnn_r50_caffe_fpn_2x_coco_bbox_mAP-0.388__segm_mAP-0.363_20200506_004738-ee87b137.pth
+
+ - Name: ms-rcnn_r101-caffe_fpn_1x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.5
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_1x_coco/ms_rcnn_r101_caffe_fpn_1x_coco_bbox_mAP-0.404__segm_mAP-0.376_20200506_004755-b9b12a37.pth
+
+ - Name: ms-rcnn_r101-caffe_fpn_2x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_r101_caffe_fpn_2x_coco/ms_rcnn_r101_caffe_fpn_2x_coco_bbox_mAP-0.411__segm_mAP-0.381_20200506_011134-5f3cc74f.pth
+
+ - Name: ms-rcnn_x101-32x4d_fpn_1x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.9
+ inference time (ms/im):
+ - value: 90.91
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_32x4d_fpn_1x_coco/ms_rcnn_x101_32x4d_fpn_1x_coco_20200206-81fd1740.pth
+
+ - Name: ms-rcnn_x101-64x4d_fpn_1x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 11.0
+ inference time (ms/im):
+ - value: 125
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_1x_coco/ms_rcnn_x101_64x4d_fpn_1x_coco_20200206-86ba88d2.pth
+
+ - Name: ms-rcnn_x101-64x4d_fpn_2x_coco
+ In Collection: Mask Scoring R-CNN
+ Config: configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 11.0
+ inference time (ms/im):
+ - value: 125
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/ms_rcnn/ms_rcnn_x101_64x4d_fpn_2x_coco/ms_rcnn_x101_64x4d_fpn_2x_coco_20200308-02a445e2.pth
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2ff4f2d66ae6de88ba9d5d8fb5cf31abaa4cb3c5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './ms-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..54b29e4f7aea547e2b26782b71ada8053930d325
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r101-caffe_fpn_2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './ms-rcnn_r101-caffe_fpn_1x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e7fbc51f1ba431ca7c22ff3d2c74cfc9e1263ffb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ type='MaskScoringRCNN',
+ roi_head=dict(
+ type='MaskScoringRoIHead',
+ mask_iou_head=dict(
+ type='MaskIoUHead',
+ num_convs=4,
+ num_fcs=2,
+ roi_feat_size=14,
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ num_classes=80)),
+ # model training and testing settings
+ train_cfg=dict(rcnn=dict(mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..033488229220e5b044c30c43f5e72f8468f68224
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50-caffe_fpn_2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './ms-rcnn_r50-caffe_fpn_1x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0ae47d1c38daa4430de4b4264bbb2aef0eb7f7ea
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ type='MaskScoringRCNN',
+ roi_head=dict(
+ type='MaskScoringRoIHead',
+ mask_iou_head=dict(
+ type='MaskIoUHead',
+ num_convs=4,
+ num_fcs=2,
+ roi_feat_size=14,
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ num_classes=80)),
+ # model training and testing settings
+ train_cfg=dict(rcnn=dict(mask_thr_binary=0.5)))
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1a5d0d0f3188e8e661cc9ab7a731fc631dd950ac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ms-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..16290076c07d7a97108b89e4a41b5ff51cbbcdc1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './ms-rcnn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7aec1874394692a63dc8caeef2609cf01b7bfd7c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ms_rcnn/ms-rcnn_x101-64x4d_fpn_2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './ms-rcnn_x101-64x4d_fpn_1x_coco.py'
+# learning policy
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/nas_fcos/README.md b/grounding-dino/mmdetection/configs/nas_fcos/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a0ec77c8f118f8aeb47ef4cb0efb0022790fa270
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fcos/README.md
@@ -0,0 +1,35 @@
+# NAS-FCOS
+
+> [NAS-FCOS: Fast Neural Architecture Search for Object Detection](https://arxiv.org/abs/1906.04423)
+
+
+
+## Abstract
+
+The success of deep neural networks relies on significant architecture engineering. Recently neural architecture search (NAS) has emerged as a promise to greatly reduce manual effort in network design by automatically searching for optimal architectures, although typically such algorithms need an excessive amount of computational resources, e.g., a few thousand GPU-days. To date, on challenging vision tasks such as object detection, NAS, especially fast versions of NAS, is less studied. Here we propose to search for the decoder structure of object detectors with search efficiency being taken into consideration. To be more specific, we aim to efficiently search for the feature pyramid network (FPN) as well as the prediction head of a simple anchor-free object detector, namely FCOS, using a tailored reinforcement learning paradigm. With carefully designed search space, search algorithms and strategies for evaluating network quality, we are able to efficiently search a top-performing detection architecture within 4 days using 8 V100 GPUs. The discovered architecture surpasses state-of-the-art object detection models (such as Faster R-CNN, RetinaNet and FCOS) by 1.5 to 3.5 points in AP on the COCO dataset, with comparable computation complexity and memory footprint, demonstrating the efficacy of the proposed NAS for object detection.
+
+
+
+ +
+
+
+## Results and Models
+
+| Head | Backbone | Style | GN-head | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :----------: | :------: | :---: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| NAS-FCOSHead | R-50 | caffe | Y | 1x | | | 39.4 | [config](./nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200520-1bdba3ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200520.log.json) |
+| FCOSHead | R-50 | caffe | Y | 1x | | | 38.5 | [config](./nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200521-7fdcbce0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200521.log.json) |
+
+**Notes:**
+
+- To be consistent with the author's implementation, we use 4 GPUs with 4 images/GPU.
+
+## Citation
+
+```latex
+@article{wang2019fcos,
+ title={Nas-fcos: Fast neural architecture search for object detection},
+ author={Wang, Ning and Gao, Yang and Chen, Hao and Wang, Peng and Tian, Zhi and Shen, Chunhua},
+ journal={arXiv preprint arXiv:1906.04423},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/nas_fcos/metafile.yml b/grounding-dino/mmdetection/configs/nas_fcos/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..02292a41516b6b2d5ab87e629f2bd2672e61e0fb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fcos/metafile.yml
@@ -0,0 +1,44 @@
+Collections:
+ - Name: NAS-FCOS
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 4x V100 GPUs
+ Architecture:
+ - FPN
+ - NAS-FCOS
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1906.04423
+ Title: 'NAS-FCOS: Fast Neural Architecture Search for Object Detection'
+ README: configs/nas_fcos/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/detectors/nasfcos.py#L6
+ Version: v2.1.0
+
+Models:
+ - Name: nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco
+ In Collection: NAS-FCOS
+ Config: configs/nas_fcos/nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_nashead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200520-1bdba3ce.pth
+
+ - Name: nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco
+ In Collection: NAS-FCOS
+ Config: configs/nas_fcos/nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/nas_fcos/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco/nas_fcos_fcoshead_r50_caffe_fpn_gn-head_4x4_1x_coco_20200521-7fdcbce0.pth
diff --git a/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ba207c9fbdddc5cd30e4d4d86add2c98664e7ffb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_fcoshead-gn-head_4xb4-1x_coco.py
@@ -0,0 +1,75 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model settings
+model = dict(
+ type='NASFCOS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False, eps=0),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ neck=dict(
+ type='NASFCOS_FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs=True,
+ num_outs=5,
+ norm_cfg=dict(type='BN'),
+ conv_cfg=dict(type='DCNv2', deform_groups=2)),
+ bbox_head=dict(
+ type='FCOSHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ norm_cfg=dict(type='GN', num_groups=32),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='IoULoss', loss_weight=1.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# dataset settings
+train_dataloader = dict(batch_size=4, num_workers=2)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.01),
+ paramwise_cfg=dict(bias_lr_mult=2., bias_decay_mult=0.))
diff --git a/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco.py b/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..329f34c45ca0ea3f95e8da8505717df86b7c79c0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fcos/nas-fcos_r50-caffe_fpn_nashead-gn-head_4xb4-1x_coco.py
@@ -0,0 +1,74 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model settings
+model = dict(
+ type='NASFCOS',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False, eps=0),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')),
+ neck=dict(
+ type='NASFCOS_FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs=True,
+ num_outs=5,
+ norm_cfg=dict(type='BN'),
+ conv_cfg=dict(type='DCNv2', deform_groups=2)),
+ bbox_head=dict(
+ type='NASFCOSHead',
+ num_classes=80,
+ in_channels=256,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ norm_cfg=dict(type='GN', num_groups=32),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='IoULoss', loss_weight=1.0),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# dataset settings
+train_dataloader = dict(batch_size=4, num_workers=2)
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.01),
+ paramwise_cfg=dict(bias_lr_mult=2., bias_decay_mult=0.))
diff --git a/grounding-dino/mmdetection/configs/nas_fpn/README.md b/grounding-dino/mmdetection/configs/nas_fpn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..260ec470fda46ae8d41dd768c5924da59803eb94
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fpn/README.md
@@ -0,0 +1,36 @@
+# NAS-FPN
+
+> [NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection](https://arxiv.org/abs/1904.07392)
+
+
+
+## Abstract
+
+Current state-of-the-art convolutional architectures for object detection are manually designed. Here we aim to learn a better architecture of feature pyramid network for object detection. We adopt Neural Architecture Search and discover a new feature pyramid architecture in a novel scalable search space covering all cross-scale connections. The discovered architecture, named NAS-FPN, consists of a combination of top-down and bottom-up connections to fuse features across scales. NAS-FPN, combined with various backbone models in the RetinaNet framework, achieves better accuracy and latency tradeoff compared to state-of-the-art object detection models. NAS-FPN improves mobile detection accuracy by 2 AP compared to state-of-the-art SSDLite with MobileNetV2 model in \[32\] and achieves 48.3 AP which surpasses Mask R-CNN \[10\] detection accuracy with less computation time.
+
+
+
+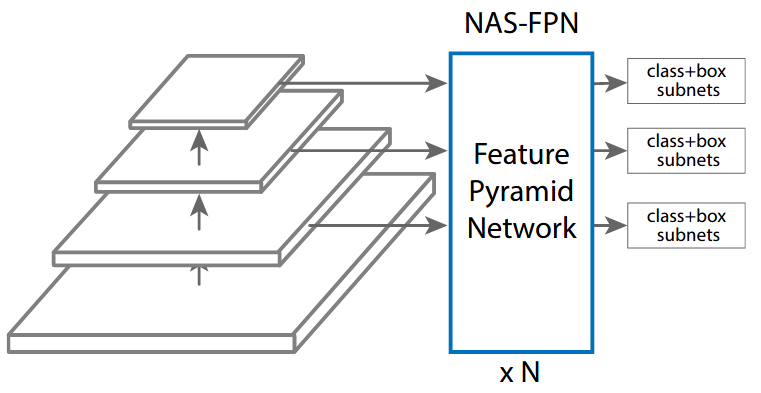 +
+
+
+## Results and Models
+
+We benchmark the new training schedule (crop training, large batch, unfrozen BN, 50 epochs) introduced in NAS-FPN. RetinaNet is used in the paper.
+
+| Backbone | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :---------: | :-----: | :------: | :------------: | :----: | :--------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | 50e | 12.9 | 22.9 | 37.9 | [config](./retinanet_r50_fpn_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_fpn_crop640_50e_coco/retinanet_r50_fpn_crop640_50e_coco-9b953d76.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_fpn_crop640_50e_coco/retinanet_r50_fpn_crop640_50e_coco_20200529_095329.log.json) |
+| R-50-NASFPN | 50e | 13.2 | 23.0 | 40.5 | [config](./retinanet_r50_nasfpn_crop640-50e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_nasfpn_crop640_50e_coco/retinanet_r50_nasfpn_crop640_50e_coco-0ad1f644.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_nasfpn_crop640_50e_coco/retinanet_r50_nasfpn_crop640_50e_coco_20200528_230008.log.json) |
+
+**Note**: We find that it is unstable to train NAS-FPN and there is a small chance that results can be 3% mAP lower.
+
+## Citation
+
+```latex
+@inproceedings{ghiasi2019fpn,
+ title={Nas-fpn: Learning scalable feature pyramid architecture for object detection},
+ author={Ghiasi, Golnaz and Lin, Tsung-Yi and Le, Quoc V},
+ booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
+ pages={7036--7045},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/nas_fpn/metafile.yml b/grounding-dino/mmdetection/configs/nas_fpn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..aef0df6d7f38c71d691526004c0f1d19d66744b0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fpn/metafile.yml
@@ -0,0 +1,59 @@
+Collections:
+ - Name: NAS-FPN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - NAS-FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1904.07392
+ Title: 'NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection'
+ README: configs/nas_fpn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/necks/nas_fpn.py#L67
+ Version: v2.0.0
+
+Models:
+ - Name: retinanet_r50_fpn_crop640-50e_coco
+ In Collection: NAS-FPN
+ Config: configs/nas_fpn/retinanet_r50_fpn_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 12.9
+ inference time (ms/im):
+ - value: 43.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_fpn_crop640_50e_coco/retinanet_r50_fpn_crop640_50e_coco-9b953d76.pth
+
+ - Name: retinanet_r50_nasfpn_crop640-50e_coco
+ In Collection: NAS-FPN
+ Config: configs/nas_fpn/retinanet_r50_nasfpn_crop640-50e_coco.py
+ Metadata:
+ Training Memory (GB): 13.2
+ inference time (ms/im):
+ - value: 43.48
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 50
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/nas_fpn/retinanet_r50_nasfpn_crop640_50e_coco/retinanet_r50_nasfpn_crop640_50e_coco-0ad1f644.pth
diff --git a/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_fpn_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_fpn_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..11c34f6758a4862571e3f840424341c3964115be
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_fpn_crop640-50e_coco.py
@@ -0,0 +1,78 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+norm_cfg = dict(type='BN', requires_grad=True)
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=64,
+ batch_augments=[dict(type='BatchFixedSizePad', size=(640, 640))]),
+ backbone=dict(norm_eval=False),
+ neck=dict(
+ relu_before_extra_convs=True,
+ no_norm_on_lateral=True,
+ norm_cfg=norm_cfg),
+ bbox_head=dict(type='RetinaSepBNHead', num_ins=5, norm_cfg=norm_cfg),
+ # training and testing settings
+ train_cfg=dict(assigner=dict(neg_iou_thr=0.5)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize',
+ scale=(640, 640),
+ ratio_range=(0.8, 1.2),
+ keep_ratio=True),
+ dict(type='RandomCrop', crop_size=(640, 640)),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(640, 640), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8, num_workers=4, dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# training schedule for 50e
+max_epochs = 50
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[30, 40],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ paramwise_cfg=dict(norm_decay_mult=0, bypass_duplicate=True))
+
+env_cfg = dict(cudnn_benchmark=True)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_nasfpn_crop640-50e_coco.py b/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_nasfpn_crop640-50e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a851b745defb72aa05df289a3002c1534655d118
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/nas_fpn/retinanet_r50_nasfpn_crop640-50e_coco.py
@@ -0,0 +1,16 @@
+_base_ = './retinanet_r50_fpn_crop640-50e_coco.py'
+
+# model settings
+model = dict(
+ # `pad_size_divisor=128` ensures the feature maps sizes
+ # in `NAS_FPN` won't mismatch.
+ data_preprocessor=dict(pad_size_divisor=128),
+ neck=dict(
+ _delete_=True,
+ type='NASFPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5,
+ stack_times=7,
+ start_level=1,
+ norm_cfg=dict(type='BN', requires_grad=True)))
diff --git a/grounding-dino/mmdetection/configs/objects365/README.md b/grounding-dino/mmdetection/configs/objects365/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..fca0dbfc94505b437598a02ba9e2c6cf10778834
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/README.md
@@ -0,0 +1,102 @@
+# Objects365 Dataset
+
+> [Objects365 Dataset](https://openaccess.thecvf.com/content_ICCV_2019/papers/Shao_Objects365_A_Large-Scale_High-Quality_Dataset_for_Object_Detection_ICCV_2019_paper.pdf)
+
+
+
+## Abstract
+
+
+
+#### Objects365 Dataset V1
+
+[Objects365 Dataset V1](http://www.objects365.org/overview.html) is a brand new dataset,
+designed to spur object detection research with a focus on diverse objects in the Wild.
+It has 365 object categories over 600K training images. More than 10 million, high-quality bounding boxes are manually labeled through a three-step, carefully designed annotation pipeline. It is the largest object detection dataset (with full annotation) so far and establishes a more challenging benchmark for the community. Objects365 can serve as a better feature learning dataset for localization-sensitive tasks like object detection
+and semantic segmentation.
+
+
+
+
+
+ +
+
+
+#### Objects365 Dataset V2
+
+[Objects365 Dataset V2](http://www.objects365.org/overview.html) is based on the V1 release of the Objects365 dataset.
+Objects 365 annotated 365 object classes on more than 1800k images, with more than 29 million bounding boxes in the training set, surpassing PASCAL VOC, ImageNet, and COCO datasets.
+Objects 365 includes 11 categories of people, clothing, living room, bathroom, kitchen, office/medical, electrical appliances, transportation, food, animals, sports/musical instruments, and each category has dozens of subcategories.
+
+## Citation
+
+```
+@inproceedings{shao2019objects365,
+ title={Objects365: A large-scale, high-quality dataset for object detection},
+ author={Shao, Shuai and Li, Zeming and Zhang, Tianyuan and Peng, Chao and Yu, Gang and Zhang, Xiangyu and Li, Jing and Sun, Jian},
+ booktitle={Proceedings of the IEEE/CVF international conference on computer vision},
+ pages={8430--8439},
+ year={2019}
+}
+```
+
+## Prepare Dataset
+
+1. You need to download and extract Objects365 dataset. Users can download Objects365 V2 by using `tools/misc/download_dataset.py`.
+
+ **Usage**
+
+ ```shell
+ python tools/misc/download_dataset.py --dataset-name objects365v2 \
+ --save-dir ${SAVING PATH} \
+ --unzip \
+ --delete # Optional, delete the download zip file
+ ```
+
+ **Note:** There is no download link for Objects365 V1 right now. If you would like to download Objects365-V1, please visit [official website](http://www.objects365.org/) to concat the author.
+
+2. The directory should be like this:
+
+ ```none
+ mmdetection
+ ├── mmdet
+ ├── tools
+ ├── configs
+ ├── data
+ │ ├── Objects365
+ │ │ ├── Obj365_v1
+ │ │ │ ├── annotations
+ │ │ │ │ ├── objects365_train.json
+ │ │ │ │ ├── objects365_val.json
+ │ │ │ ├── train # training images
+ │ │ │ ├── val # validation images
+ │ │ ├── Obj365_v2
+ │ │ │ ├── annotations
+ │ │ │ │ ├── zhiyuan_objv2_train.json
+ │ │ │ │ ├── zhiyuan_objv2_val.json
+ │ │ │ ├── train # training images
+ │ │ │ │ ├── patch0
+ │ │ │ │ ├── patch1
+ │ │ │ │ ├── ...
+ │ │ │ ├── val # validation images
+ │ │ │ │ ├── patch0
+ │ │ │ │ ├── patch1
+ │ │ │ │ ├── ...
+ ```
+
+## Results and Models
+
+### Objects365 V1
+
+| Architecture | Backbone | Style | Lr schd | Mem (GB) | box AP | Config | Download |
+| :----------: | :------: | :-----: | :-----: | :------: | :----: | :-------------------------------------------------------------------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50 | pytorch | 1x | - | 19.6 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v1/faster_rcnn_r50_fpn_16x4_1x_obj365v1_20221219_181226-9ff10f95.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v1/faster_rcnn_r50_fpn_16x4_1x_obj365v1_20221219_181226.log.json) |
+| Faster R-CNN | R-50 | pytorch | 1350K | - | 22.3 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/faster-rcnn_r50-syncbn_fpn_1350k_objects365v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1_20220510_142457-337d8965.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1_20220510_142457.log.json) |
+| Retinanet | R-50 | pytorch | 1x | - | 14.8 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/retinanet_r50_fpn_1x_objects365v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v1/retinanet_r50_fpn_1x_obj365v1_20221219_181859-ba3e3dd5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v1/retinanet_r50_fpn_1x_obj365v1_20221219_181859.log.json) |
+| Retinanet | R-50 | pytorch | 1350K | - | 18.0 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/retinanet_r50-syncbn_fpn_1350k_objects365v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_syncbn_1350k_obj365v1/retinanet_r50_fpn_syncbn_1350k_obj365v1_20220513_111237-7517c576.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_syncbn_1350k_obj365v1/retinanet_r50_fpn_syncbn_1350k_obj365v1_20220513_111237.log.json) |
+
+### Objects365 V2
+
+| Architecture | Backbone | Style | Lr schd | Mem (GB) | box AP | Config | Download |
+| :----------: | :------: | :-----: | :-----: | :------: | :----: | :---------------------------------------------------------------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50 | pytorch | 1x | - | 19.8 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v2.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v2/faster_rcnn_r50_fpn_16x4_1x_obj365v2_20221220_175040-5910b015.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v2/faster_rcnn_r50_fpn_16x4_1x_obj365v2_20221220_175040.log.json) |
+| Retinanet | R-50 | pytorch | 1x | - | 16.7 | [config](https://github.com/open-mmlab/mmdetection/tree/main/configs/objects365/retinanet_r50_fpn_1x_objects365v2.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v2/retinanet_r50_fpn_1x_obj365v2_20221223_122105-d9b191f1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v2/retinanet_r50_fpn_1x_obj365v2_20221223_122105.log.json) |
diff --git a/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50-syncbn_fpn_1350k_objects365v1.py b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50-syncbn_fpn_1350k_objects365v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..ff7d0a360b95b1a72f779a8f7ad22a7e03235720
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50-syncbn_fpn_1350k_objects365v1.py
@@ -0,0 +1,49 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/objects365v2_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(norm_cfg=dict(type='SyncBN', requires_grad=True)),
+ roi_head=dict(bbox_head=dict(num_classes=365)))
+
+# training schedule for 1350K
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=1350000, # 36 epochs
+ val_interval=150000)
+
+# Using 8 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=1350000,
+ by_epoch=False,
+ milestones=[900000, 1200000],
+ gamma=0.1)
+]
+
+train_dataloader = dict(sampler=dict(type='InfiniteSampler'))
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=150000))
+
+log_processor = dict(by_epoch=False)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v1.py b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..bc0d96fa22920a34f9ab9437a0f15cc93f46d0fa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v1.py
@@ -0,0 +1,39 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/objects365v1_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(roi_head=dict(bbox_head=dict(num_classes=365)))
+
+train_dataloader = dict(
+ batch_size=4, # using 16 GPUS while training. total batch size is 16 x 4)
+)
+
+# Using 32 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v2.py b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v2.py
new file mode 100644
index 0000000000000000000000000000000000000000..1090678f652444c82a627fbf8bdda39fe0077f1e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v2.py
@@ -0,0 +1,39 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/objects365v2_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(roi_head=dict(bbox_head=dict(num_classes=365)))
+
+train_dataloader = dict(
+ batch_size=4, # using 16 GPUS while training. total batch size is 16 x 4)
+)
+
+# Using 32 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/objects365/metafile.yml b/grounding-dino/mmdetection/configs/objects365/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d43e8bde9d2aad9516f5383cd4152faf8f097660
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/metafile.yml
@@ -0,0 +1,101 @@
+- Name: retinanet_r50_fpn_1x_objects365v1
+ In Collection: RetinaNet
+ Config: configs/objects365/retinanet_r50_fpn_1x_objects365v1.py
+ Metadata:
+ Training Memory (GB): 7.4
+ Epochs: 12
+ Training Data: Objects365 v1
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v1
+ Metrics:
+ box AP: 14.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v1/retinanet_r50_fpn_1x_obj365v1_20221219_181859-ba3e3dd5.pth
+
+- Name: retinanet_r50-syncbn_fpn_1350k_objects365v1
+ In Collection: RetinaNet
+ Config: configs/objects365/retinanet_r50-syncbn_fpn_1350k_objects365v1.py
+ Metadata:
+ Training Memory (GB): 7.6
+ Iterations: 1350000
+ Training Data: Objects365 v1
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v1
+ Metrics:
+ box AP: 18.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_syncbn_1350k_obj365v1/retinanet_r50_fpn_syncbn_1350k_obj365v1_20220513_111237-7517c576.pth
+
+- Name: retinanet_r50_fpn_1x_objects365v2
+ In Collection: RetinaNet
+ Config: configs/objects365/retinanet_r50_fpn_1x_objects365v2.py
+ Metadata:
+ Training Memory (GB): 7.2
+ Epochs: 12
+ Training Data: Objects365 v2
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v2
+ Metrics:
+ box AP: 16.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/retinanet_r50_fpn_1x_obj365v2/retinanet_r50_fpn_1x_obj365v2_20221223_122105-d9b191f1.pth
+
+- Name: faster-rcnn_r50_fpn_16xb4-1x_objects365v1
+ In Collection: Faster R-CNN
+ Config: configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v1.py
+ Metadata:
+ Training Memory (GB): 11.4
+ Epochs: 12
+ Training Data: Objects365 v1
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v1
+ Metrics:
+ box AP: 19.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v1/faster_rcnn_r50_fpn_16x4_1x_obj365v1_20221219_181226-9ff10f95.pth
+
+- Name: faster-rcnn_r50-syncbn_fpn_1350k_objects365v1
+ In Collection: Faster R-CNN
+ Config: configs/objects365/faster-rcnn_r50-syncbn_fpn_1350k_objects365v1.py
+ Metadata:
+ Training Memory (GB): 8.6
+ Iterations: 1350000
+ Training Data: Objects365 v1
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v1
+ Metrics:
+ box AP: 22.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1/faster_rcnn_r50_fpn_syncbn_1350k_obj365v1_20220510_142457-337d8965.pth
+
+- Name: faster-rcnn_r50_fpn_16xb4-1x_objects365v2
+ In Collection: Faster R-CNN
+ Config: configs/objects365/faster-rcnn_r50_fpn_16xb4-1x_objects365v2.py
+ Metadata:
+ Training Memory (GB): 10.8
+ Epochs: 12
+ Training Data: Objects365 v1
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Objects365 v2
+ Metrics:
+ box AP: 19.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/objects365/faster_rcnn_r50_fpn_16x4_1x_obj365v2/faster_rcnn_r50_fpn_16x4_1x_obj365v2_20221220_175040-5910b015.pth
diff --git a/grounding-dino/mmdetection/configs/objects365/retinanet_r50-syncbn_fpn_1350k_objects365v1.py b/grounding-dino/mmdetection/configs/objects365/retinanet_r50-syncbn_fpn_1350k_objects365v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..c41dfce8bc67e7f4d18434a2c10a33c66da403c1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/retinanet_r50-syncbn_fpn_1350k_objects365v1.py
@@ -0,0 +1,49 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/objects365v2_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(norm_cfg=dict(type='SyncBN', requires_grad=True)),
+ bbox_head=dict(num_classes=365))
+
+# training schedule for 1350K
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=1350000, # 36 epochs
+ val_interval=150000)
+
+# Using 8 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=10000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=1350000,
+ by_epoch=False,
+ milestones=[900000, 1200000],
+ gamma=0.1)
+]
+
+train_dataloader = dict(sampler=dict(type='InfiniteSampler'))
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=150000))
+
+log_processor = dict(by_epoch=False)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v1.py b/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..72144192aaa36d757053a982ed7ad2a886916b75
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v1.py
@@ -0,0 +1,35 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/objects365v1_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(bbox_head=dict(num_classes=365))
+
+# Using 8 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=10000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v2.py b/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v2.py
new file mode 100644
index 0000000000000000000000000000000000000000..219544126ab0ab6e93d50f1962ffaf40f25b14f0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/objects365/retinanet_r50_fpn_1x_objects365v2.py
@@ -0,0 +1,35 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/objects365v2_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(bbox_head=dict(num_classes=365))
+
+# Using 8 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=10000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/ocsort/README.md b/grounding-dino/mmdetection/configs/ocsort/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e9b86c6c6c1ca167b875c5d3241af28dc4919358
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ocsort/README.md
@@ -0,0 +1,56 @@
+# Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking
+
+## Abstract
+
+
+
+Multi-Object Tracking (MOT) has rapidly progressed with the development of object detection and re-identification. However, motion modeling, which facilitates object association by forecasting short-term trajec- tories with past observations, has been relatively under-explored in recent years. Current motion models in MOT typically assume that the object motion is linear in a small time window and needs continuous observations, so these methods are sensitive to occlusions and non-linear motion and require high frame-rate videos. In this work, we show that a simple motion model can obtain state-of-the-art tracking performance without other cues like appearance. We emphasize the role of “observation” when recovering tracks from being lost and reducing the error accumulated by linear motion models during the lost period. We thus name the proposed method as Observation-Centric SORT, OC-SORT for short. It remains simple, online, and real-time but improves robustness over occlusion and non-linear motion. It achieves 63.2 and 62.1 HOTA on MOT17 and MOT20, respectively, surpassing all published methods. It also sets new states of the art on KITTI Pedestrian Tracking and DanceTrack where the object motion is highly non-linear
+
+
+
+
+
+  +
+
+
+## Citation
+
+
+
+```latex
+@article{cao2022observation,
+ title={Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking},
+ author={Cao, Jinkun and Weng, Xinshuo and Khirodkar, Rawal and Pang, Jiangmiao and Kitani, Kris},
+ journal={arXiv preprint arXiv:2203.14360},
+ year={2022}
+}
+```
+
+## Results and models on MOT17
+
+The performance on `MOT17-half-val` is comparable with the performance from [the OC-SORT official implementation](https://github.com/noahcao/OC_SORT). We use the same YOLO-X detector weights as in [ByteTrack](https://github.com/open-mmlab/mmtracking/tree/master/configs/mot/bytetrack).
+
+| Method | Detector | Train Set | Test Set | Public | Inf time (fps) | HOTA | MOTA | IDF1 | FP | FN | IDSw. | Config | Download |
+| :-----: | :------: | :---------------------: | :------: | :----: | :------------: | :--: | :--: | :--: | :---: | :---: | :---: | :-------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| OC-SORT | YOLOX-X | CrowdHuman + half-train | half-val | N | - | 67.5 | 77.5 | 78.2 | 15987 | 19590 | 855 | [config](ocsort_yolox_x_crowdhuman_mot17-private-half.py) | [model](https://download.openmmlab.com/mmtracking/mot/ocsort/mot_dataset/ocsort_yolox_x_crowdhuman_mot17-private-half_20220813_101618-fe150582.pth) \| [log](https://download.openmmlab.com/mmtracking/mot/ocsort/mot_dataset/ocsort_yolox_x_crowdhuman_mot17-private-half_20220813_101618.log.json) |
+
+## Get started
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Prepare
+
+Tracking Dataset Prepare can refer to this [document](../../docs/en/user_guides/tracking_dataset_prepare.md).
+
+### 3. Training
+
+OCSORT training is same as Bytetrack, please refer to [document](../../configs/bytetrack/README.md).
+
+### 4. Testing and evaluation
+
+OCSORT evaluation and test are same as Bytetrack, please refer to [document](../../configs/bytetrack/README.md).
+
+### 5.Inference
+
+OCSORT inference is same as Bytetrack, please refer to [document](../../configs/bytetrack/README.md).
diff --git a/grounding-dino/mmdetection/configs/ocsort/metafile.yml b/grounding-dino/mmdetection/configs/ocsort/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0a31ef108ea7c594d3566970763ff704234d4e0c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ocsort/metafile.yml
@@ -0,0 +1,27 @@
+Collections:
+ - Name: OCSORT
+ Metadata:
+ Training Techniques:
+ - SGD with Momentum
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - YOLOX
+ Paper:
+ URL: https://arxiv.org/abs/2203.14360
+ Title: Observation-Centric SORT Rethinking SORT for Robust Multi-Object Tracking
+ README: configs/ocsort/README.md
+
+Models:
+ - Name: ocsort_yolox_x_crowdhuman_mot17-private-half
+ In Collection: OCSORT
+ Config: configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py
+ Metadata:
+ Training Data: CrowdHuman + MOT17-half-train
+ Results:
+ - Task: Multiple Object Tracking
+ Dataset: MOT17-half-val
+ Metrics:
+ HOTA: 67.5
+ MOTA: 77.5
+ IDF1: 78.2
+ Weights: https://download.openmmlab.com/mmtracking/mot/ocsort/mot_dataset/ocsort_yolox_x_crowdhuman_mot17-private-half_20220813_101618-fe150582.pth
diff --git a/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py b/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea04923d6aec237c51b7e23d0348c487cb9d697b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../bytetrack/bytetrack_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py', # noqa: E501
+]
+
+model = dict(
+ type='OCSORT',
+ tracker=dict(
+ _delete_=True,
+ type='OCSORTTracker',
+ motion=dict(type='KalmanFilter'),
+ obj_score_thr=0.3,
+ init_track_thr=0.7,
+ weight_iou_with_det_scores=True,
+ match_iou_thr=0.3,
+ num_tentatives=3,
+ vel_consist_weight=0.2,
+ vel_delta_t=3,
+ num_frames_retain=30))
diff --git a/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot20train_test-mot20test.py b/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot20train_test-mot20test.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea04923d6aec237c51b7e23d0348c487cb9d697b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/ocsort/ocsort_yolox_x_8xb4-amp-80e_crowdhuman-mot20train_test-mot20test.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../bytetrack/bytetrack_yolox_x_8xb4-amp-80e_crowdhuman-mot17halftrain_test-mot17halfval.py', # noqa: E501
+]
+
+model = dict(
+ type='OCSORT',
+ tracker=dict(
+ _delete_=True,
+ type='OCSORTTracker',
+ motion=dict(type='KalmanFilter'),
+ obj_score_thr=0.3,
+ init_track_thr=0.7,
+ weight_iou_with_det_scores=True,
+ match_iou_thr=0.3,
+ num_tentatives=3,
+ vel_consist_weight=0.2,
+ vel_delta_t=3,
+ num_frames_retain=30))
diff --git a/grounding-dino/mmdetection/configs/openimages/README.md b/grounding-dino/mmdetection/configs/openimages/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ccfc721da568833222038000ac1a5ea12e9bb732
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/README.md
@@ -0,0 +1,149 @@
+# Open Images Dataset
+
+> [Open Images Dataset](https://arxiv.org/abs/1811.00982)
+
+
+
+## Abstract
+
+
+
+#### Open Images v6
+
+[Open Images](https://storage.googleapis.com/openimages/web/index.html) is a dataset of ~9M images annotated with image-level labels,
+object bounding boxes, object segmentation masks, visual relationships,
+and localized narratives:
+
+- It contains a total of 16M bounding boxes for 600 object classes on
+ 1.9M images, making it the largest existing dataset with object location
+ annotations. The boxes have been largely manually drawn by professional
+ annotators to ensure accuracy and consistency. The images are very diverse
+ and often contain complex scenes with several objects (8.3 per image on
+ average).
+
+- Open Images also offers visual relationship annotations, indicating pairs
+ of objects in particular relations (e.g. "woman playing guitar", "beer on
+ table"), object properties (e.g. "table is wooden"), and human actions (e.g.
+ "woman is jumping"). In total it has 3.3M annotations from 1,466 distinct
+ relationship triplets.
+
+- In V5 we added segmentation masks for 2.8M object instances in 350 classes.
+ Segmentation masks mark the outline of objects, which characterizes their
+ spatial extent to a much higher level of detail.
+
+- In V6 we added 675k localized narratives: multimodal descriptions of images
+ consisting of synchronized voice, text, and mouse traces over the objects being
+ described. (Note we originally launched localized narratives only on train in V6,
+ but since July 2020 we also have validation and test covered.)
+
+- Finally, the dataset is annotated with 59.9M image-level labels spanning 19,957
+ classes.
+
+We believe that having a single dataset with unified annotations for image
+classification, object detection, visual relationship detection, instance
+segmentation, and multimodal image descriptions will enable to study these
+tasks jointly and stimulate progress towards genuine scene understanding.
+
+
+
+
+
+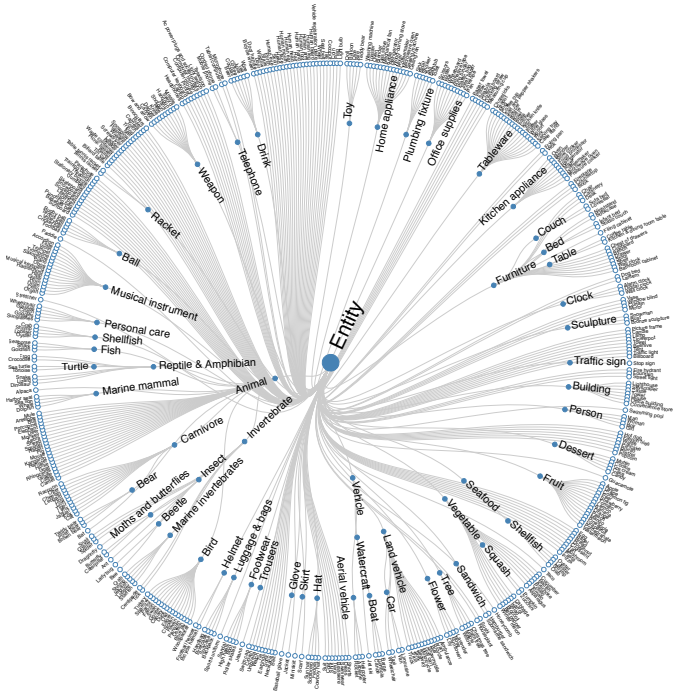 +
+
+
+#### Open Images Challenge 2019
+
+[Open Images Challenges 2019](https://storage.googleapis.com/openimages/web/challenge2019.html) is based on the V5 release of the Open
+Images dataset. The images of the dataset are very varied and
+often contain complex scenes with several objects (explore the dataset).
+
+## Citation
+
+```
+@article{OpenImages,
+ author = {Alina Kuznetsova and Hassan Rom and Neil Alldrin and Jasper Uijlings and Ivan Krasin and Jordi Pont-Tuset and Shahab Kamali and Stefan Popov and Matteo Malloci and Alexander Kolesnikov and Tom Duerig and Vittorio Ferrari},
+ title = {The Open Images Dataset V4: Unified image classification, object detection, and visual relationship detection at scale},
+ year = {2020},
+ journal = {IJCV}
+}
+```
+
+## Prepare Dataset
+
+1. You need to download and extract Open Images dataset.
+
+2. The Open Images dataset does not have image metas (width and height of the image),
+ which will be used during training and testing (evaluation). We suggest to get test image metas before
+ training/testing by using `tools/misc/get_image_metas.py`.
+
+ **Usage**
+
+ ```shell
+ python tools/misc/get_image_metas.py ${CONFIG} \
+ --dataset ${DATASET TYPE} \ # train or val or test
+ --out ${OUTPUT FILE NAME}
+ ```
+
+3. The directory should be like this:
+
+ ```none
+ mmdetection
+ ├── mmdet
+ ├── tools
+ ├── configs
+ ├── data
+ │ ├── OpenImages
+ │ │ ├── annotations
+ │ │ │ ├── bbox_labels_600_hierarchy.json
+ │ │ │ ├── class-descriptions-boxable.csv
+ │ │ │ ├── oidv6-train-annotations-bbox.scv
+ │ │ │ ├── validation-annotations-bbox.csv
+ │ │ │ ├── validation-annotations-human-imagelabels-boxable.csv
+ │ │ │ ├── validation-image-metas.pkl # get from script
+ │ │ ├── challenge2019
+ │ │ │ ├── challenge-2019-train-detection-bbox.txt
+ │ │ │ ├── challenge-2019-validation-detection-bbox.txt
+ │ │ │ ├── class_label_tree.np
+ │ │ │ ├── class_sample_train.pkl
+ │ │ │ ├── challenge-2019-validation-detection-human-imagelabels.csv # download from official website
+ │ │ │ ├── challenge-2019-validation-metas.pkl # get from script
+ │ │ ├── OpenImages
+ │ │ │ ├── train # training images
+ │ │ │ ├── test # testing images
+ │ │ │ ├── validation # validation images
+ ```
+
+**Note**:
+
+1. The training and validation images of Open Images Challenge dataset are based on
+ Open Images v6, but the test images are different.
+2. The Open Images Challenges annotations are obtained from [TSD](https://github.com/Sense-X/TSD).
+ You can also download the annotations from [official website](https://storage.googleapis.com/openimages/web/challenge2019_downloads.html),
+ and set data.train.type=OpenImagesDataset, data.val.type=OpenImagesDataset, and data.test.type=OpenImagesDataset in the config
+3. If users do not want to use `validation-annotations-human-imagelabels-boxable.csv` and `challenge-2019-validation-detection-human-imagelabels.csv`
+ users can set `test_dataloader.dataset.image_level_ann_file=None` and `test_dataloader.dataset.image_level_ann_file=None` in the config.
+ Please note that loading image-levels label is the default of Open Images evaluation metric.
+ More details please refer to the [official website](https://storage.googleapis.com/openimages/web/evaluation.html)
+
+## Results and Models
+
+| Architecture | Backbone | Style | Lr schd | Sampler | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :---------------------------: | :------: | :-----: | :-----: | :-----------------: | :------: | :------------: | :----: | :------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50 | pytorch | 1x | Group Sampler | 7.7 | - | 51.6 | [config](./faster-rcnn_r50_fpn_32xb2-1x_openimages.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_20211130_231159-e87ab7ce.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_20211130_231159.log.json) |
+| Faster R-CNN | R-50 | pytorch | 1x | Class Aware Sampler | 7.7 | - | 60.0 | [config](./faster-rcnn_r50_fpn_32xb2-cas-1x_openimages.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_20220306_202424-98c630e5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_20220306_202424.log.json) |
+| Faster R-CNN (Challenge 2019) | R-50 | pytorch | 1x | Group Sampler | 7.7 | - | 54.9 | [config](./faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge_20220114_045100-0e79e5df.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge_20220114_045100.log.json) |
+| Faster R-CNN (Challenge 2019) | R-50 | pytorch | 1x | Class Aware Sampler | 7.1 | - | 65.0 | [config](./faster-rcnn_r50_fpn_32xb2-cas-1x_openimages-challenge.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge_20220221_192021-34c402d9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge_20220221_192021.log.json) |
+| Retinanet | R-50 | pytorch | 1x | Group Sampler | 6.6 | - | 61.5 | [config](./retinanet_r50_fpn_32xb2-1x_openimages.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/retinanet_r50_fpn_32x2_1x_openimages/retinanet_r50_fpn_32x2_1x_openimages_20211223_071954-d2ae5462.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/retinanet_r50_fpn_32x2_1x_openimages/retinanet_r50_fpn_32x2_1x_openimages_20211223_071954.log.json) |
+| SSD | VGG16 | pytorch | 36e | Group Sampler | 10.8 | - | 35.4 | [config](./ssd300_32xb8-36e_openimages.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/openimages/ssd300_32x8_36e_openimages/ssd300_32x8_36e_openimages_20211224_000232-dce93846.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/openimages/ssd300_32x8_36e_openimages/ssd300_32x8_36e_openimages_20211224_000232.log.json) |
+
+**Notes:**
+
+- 'cas' is short for 'Class Aware Sampler'
+
+### Results of consider image level labels
+
+| Architecture | Sampler | Consider Image Level Labels | box AP |
+| :-------------------------------: | :-----------------: | :-------------------------: | :----: |
+| Faster R-CNN r50 (Challenge 2019) | Group Sampler | w/o | 62.19 |
+| Faster R-CNN r50 (Challenge 2019) | Group Sampler | w/ | 54.87 |
+| Faster R-CNN r50 (Challenge 2019) | Class Aware Sampler | w/o | 71.77 |
+| Faster R-CNN r50 (Challenge 2019) | Class Aware Sampler | w/ | 64.98 |
diff --git a/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py
new file mode 100644
index 0000000000000000000000000000000000000000..e79a92cccb2e432e5dd60bc080dab76781eb32bc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py
@@ -0,0 +1,39 @@
+_base_ = ['faster-rcnn_r50_fpn_32xb2-1x_openimages.py']
+
+model = dict(
+ roi_head=dict(bbox_head=dict(num_classes=500)),
+ test_cfg=dict(rcnn=dict(score_thr=0.01)))
+
+# dataset settings
+dataset_type = 'OpenImagesChallengeDataset'
+train_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='challenge2019/challenge-2019-train-detection-bbox.txt',
+ label_file='challenge2019/cls-label-description.csv',
+ hierarchy_file='challenge2019/class_label_tree.np',
+ meta_file='challenge2019/challenge-2019-train-metas.pkl'))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='challenge2019/challenge-2019-validation-detection-bbox.txt',
+ data_prefix=dict(img='OpenImages/'),
+ label_file='challenge2019/cls-label-description.csv',
+ hierarchy_file='challenge2019/class_label_tree.np',
+ meta_file='challenge2019/challenge-2019-validation-metas.pkl',
+ image_level_ann_file='challenge2019/challenge-2019-validation-'
+ 'detection-human-imagelabels.csv'))
+test_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='challenge2019/challenge-2019-validation-detection-bbox.txt',
+ label_file='challenge2019/cls-label-description.csv',
+ hierarchy_file='challenge2019/class_label_tree.np',
+ meta_file='challenge2019/challenge-2019-validation-metas.pkl',
+ image_level_ann_file='challenge2019/challenge-2019-validation-'
+ 'detection-human-imagelabels.csv'))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages.py b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages.py
new file mode 100644
index 0000000000000000000000000000000000000000..f3f0aa0a0ff0ef16cd6e55543a72b5fe405ec5a8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages.py
@@ -0,0 +1,35 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/openimages_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(roi_head=dict(bbox_head=dict(num_classes=601)))
+
+# Using 32 GPUS while training
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 64,
+ by_epoch=False,
+ begin=0,
+ end=26000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages-challenge.py b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages-challenge.py
new file mode 100644
index 0000000000000000000000000000000000000000..9e428725bcc39d2c009a2382c191fa53fe5ce284
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages-challenge.py
@@ -0,0 +1,5 @@
+_base_ = ['faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py']
+
+# Use ClassAwareSampler
+train_dataloader = dict(
+ sampler=dict(_delete_=True, type='ClassAwareSampler', num_sample_class=1))
diff --git a/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages.py b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages.py
new file mode 100644
index 0000000000000000000000000000000000000000..803190abfee63ea87e70dfe1b0fddca02f3556b8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages.py
@@ -0,0 +1,5 @@
+_base_ = ['faster-rcnn_r50_fpn_32xb2-1x_openimages.py']
+
+# Use ClassAwareSampler
+train_dataloader = dict(
+ sampler=dict(_delete_=True, type='ClassAwareSampler', num_sample_class=1))
diff --git a/grounding-dino/mmdetection/configs/openimages/metafile.yml b/grounding-dino/mmdetection/configs/openimages/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..76c1209471921610f791a074ed7a6863cd0709c0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/metafile.yml
@@ -0,0 +1,102 @@
+Models:
+ - Name: faster-rcnn_r50_fpn_32x2_1x_openimages
+ In Collection: Faster R-CNN
+ Config: configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages.py
+ Metadata:
+ Training Memory (GB): 7.7
+ Epochs: 12
+ Training Data: Open Images v6
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images v6
+ Metrics:
+ box AP: 51.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_20211130_231159-e87ab7ce.pth
+
+ - Name: retinanet_r50_fpn_32xb2-1x_openimages
+ In Collection: RetinaNet
+ Config: configs/openimages/retinanet_r50_fpn_32xb2-1x_openimages.py
+ Metadata:
+ Training Memory (GB): 6.6
+ Epochs: 12
+ Training Data: Open Images v6
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images v6
+ Metrics:
+ box AP: 61.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/retinanet_r50_fpn_32x2_1x_openimages/retinanet_r50_fpn_32x2_1x_openimages_20211223_071954-d2ae5462.pth
+
+ - Name: ssd300_32xb8-36e_openimages
+ In Collection: SSD
+ Config: configs/openimages/ssd300_32xb8-36e_openimages.py
+ Metadata:
+ Training Memory (GB): 10.8
+ Epochs: 36
+ Training Data: Open Images v6
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images v6
+ Metrics:
+ box AP: 35.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/ssd300_32x8_36e_openimages/ssd300_32x8_36e_openimages_20211224_000232-dce93846.pth
+
+ - Name: faster-rcnn_r50_fpn_32x2_1x_openimages_challenge
+ In Collection: Faster R-CNN
+ Config: configs/openimages/faster-rcnn_r50_fpn_32xb2-1x_openimages-challenge.py
+ Metadata:
+ Training Memory (GB): 7.7
+ Epochs: 12
+ Training Data: Open Images Challenge 2019
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images Challenge 2019
+ Metrics:
+ box AP: 54.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_1x_openimages_challenge_20220114_045100-0e79e5df.pth
+
+ - Name: faster-rcnn_r50_fpn_32x2_cas_1x_openimages
+ In Collection: Faster R-CNN
+ Config: configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages.py
+ Metadata:
+ Training Memory (GB): 7.7
+ Epochs: 12
+ Training Data: Open Images Challenge 2019
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images Challenge 2019
+ Metrics:
+ box AP: 60.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_20220306_202424-98c630e5.pth
+
+ - Name: faster-rcnn_r50_fpn_32x2_cas_1x_openimages_challenge
+ In Collection: Faster R-CNN
+ Config: configs/openimages/faster-rcnn_r50_fpn_32xb2-cas-1x_openimages-challenge.py
+ Metadata:
+ Training Memory (GB): 7.1
+ Epochs: 12
+ Training Data: Open Images Challenge 2019
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Results:
+ - Task: Object Detection
+ Dataset: Open Images Challenge 2019
+ Metrics:
+ box AP: 65.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/openimages/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge/faster_rcnn_r50_fpn_32x2_cas_1x_openimages_challenge_20220221_192021-34c402d9.pth
diff --git a/grounding-dino/mmdetection/configs/openimages/retinanet_r50_fpn_32xb2-1x_openimages.py b/grounding-dino/mmdetection/configs/openimages/retinanet_r50_fpn_32xb2-1x_openimages.py
new file mode 100644
index 0000000000000000000000000000000000000000..97a0eb075c730ceeaa494190e0b8369706c7d7c3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/retinanet_r50_fpn_32xb2-1x_openimages.py
@@ -0,0 +1,35 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/openimages_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(bbox_head=dict(num_classes=601))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 64,
+ by_epoch=False,
+ begin=0,
+ end=26000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.08, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (2 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/openimages/ssd300_32xb8-36e_openimages.py b/grounding-dino/mmdetection/configs/openimages/ssd300_32xb8-36e_openimages.py
new file mode 100644
index 0000000000000000000000000000000000000000..9cb51cae00a8707c0a901b99620851132e9eaccf
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/openimages/ssd300_32xb8-36e_openimages.py
@@ -0,0 +1,88 @@
+_base_ = [
+ '../_base_/models/ssd300.py', '../_base_/datasets/openimages_detection.py',
+ '../_base_/default_runtime.py', '../_base_/schedules/schedule_1x.py'
+]
+model = dict(
+ bbox_head=dict(
+ num_classes=601,
+ anchor_generator=dict(basesize_ratio_range=(0.2, 0.9))))
+# dataset settings
+dataset_type = 'OpenImagesDataset'
+data_root = 'data/OpenImages/'
+input_size = 300
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(
+ type='Expand',
+ mean={{_base_.model.data_preprocessor.mean}},
+ to_rgb={{_base_.model.data_preprocessor.bgr_to_rgb}},
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'instances'))
+]
+
+train_dataloader = dict(
+ batch_size=8, # using 32 GPUS while training. total batch size is 32 x 8
+ batch_sampler=None,
+ dataset=dict(
+ _delete_=True,
+ type='RepeatDataset',
+ times=3, # repeat 3 times, total epochs are 12 x 3
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/oidv6-train-annotations-bbox.csv',
+ data_prefix=dict(img='OpenImages/train/'),
+ label_file='annotations/class-descriptions-boxable.csv',
+ hierarchy_file='annotations/bbox_labels_600_hierarchy.json',
+ meta_file='annotations/train-image-metas.pkl',
+ pipeline=train_pipeline)))
+val_dataloader = dict(batch_size=8, dataset=dict(pipeline=test_pipeline))
+test_dataloader = dict(batch_size=8, dataset=dict(pipeline=test_pipeline))
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.04, momentum=0.9, weight_decay=5e-4))
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=0.001,
+ by_epoch=False,
+ begin=0,
+ end=20000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (32 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=256)
diff --git a/grounding-dino/mmdetection/configs/paa/README.md b/grounding-dino/mmdetection/configs/paa/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..625aacf24516087cefe1082271f25baf536bc03d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/README.md
@@ -0,0 +1,47 @@
+# PAA
+
+> [Probabilistic Anchor Assignment with IoU Prediction for Object Detection](https://arxiv.org/abs/2007.08103)
+
+
+
+## Abstract
+
+In object detection, determining which anchors to assign as positive or negative samples, known as anchor assignment, has been revealed as a core procedure that can significantly affect a model's performance. In this paper we propose a novel anchor assignment strategy that adaptively separates anchors into positive and negative samples for a ground truth bounding box according to the model's learning status such that it is able to reason about the separation in a probabilistic manner. To do so we first calculate the scores of anchors conditioned on the model and fit a probability distribution to these scores. The model is then trained with anchors separated into positive and negative samples according to their probabilities. Moreover, we investigate the gap between the training and testing objectives and propose to predict the Intersection-over-Unions of detected boxes as a measure of localization quality to reduce the discrepancy. The combined score of classification and localization qualities serving as a box selection metric in non-maximum suppression well aligns with the proposed anchor assignment strategy and leads significant performance improvements. The proposed methods only add a single convolutional layer to RetinaNet baseline and does not require multiple anchors per location, so are efficient. Experimental results verify the effectiveness of the proposed methods. Especially, our models set new records for single-stage detectors on MS COCO test-dev dataset with various backbones.
+
+
+
+ +
+
+
+## Results and Models
+
+We provide config files to reproduce the object detection results in the
+ECCV 2020 paper for Probabilistic Anchor Assignment with IoU
+Prediction for Object Detection.
+
+| Backbone | Lr schd | Mem (GB) | Score voting | box AP | Config | Download |
+| :-------: | :-----: | :------: | :----------: | :----: | :------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | 12e | 3.7 | True | 40.4 | [config](./paa_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.log.json) |
+| R-50-FPN | 12e | 3.7 | False | 40.2 | - | |
+| R-50-FPN | 18e | 3.7 | True | 41.4 | [config](./paa_r50_fpn_1.5x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1.5x_coco/paa_r50_fpn_1.5x_coco_20200823-805d6078.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1.5x_coco/paa_r50_fpn_1.5x_coco_20200823-805d6078.log.json) |
+| R-50-FPN | 18e | 3.7 | False | 41.2 | - | |
+| R-50-FPN | 24e | 3.7 | True | 41.6 | [config](./paa_r50_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_2x_coco/paa_r50_fpn_2x_coco_20200821-c98bfc4e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_2x_coco/paa_r50_fpn_2x_coco_20200821-c98bfc4e.log.json) |
+| R-50-FPN | 36e | 3.7 | True | 43.3 | [config](./paa_r50_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_mstrain_3x_coco/paa_r50_fpn_mstrain_3x_coco_20210121_145722-06a6880b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_mstrain_3x_coco/paa_r50_fpn_mstrain_3x_coco_20210121_145722.log.json) |
+| R-101-FPN | 12e | 6.2 | True | 42.6 | [config](./paa_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.log.json) |
+| R-101-FPN | 12e | 6.2 | False | 42.4 | - | |
+| R-101-FPN | 24e | 6.2 | True | 43.5 | [config](./paa_r101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_2x_coco/paa_r101_fpn_2x_coco_20200821-6829f96b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_2x_coco/paa_r101_fpn_2x_coco_20200821-6829f96b.log.json) |
+| R-101-FPN | 36e | 6.2 | True | 45.1 | [config](./paa_r101_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_mstrain_3x_coco/paa_r101_fpn_mstrain_3x_coco_20210122_084202-83250d22.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_mstrain_3x_coco/paa_r101_fpn_mstrain_3x_coco_20210122_084202.log.json) |
+
+**Note**:
+
+1. We find that the performance is unstable with 1x setting and may fluctuate by about 0.2 mAP. We report the best results.
+
+## Citation
+
+```latex
+@inproceedings{paa-eccv2020,
+ title={Probabilistic Anchor Assignment with IoU Prediction for Object Detection},
+ author={Kim, Kang and Lee, Hee Seok},
+ booktitle = {ECCV},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/paa/metafile.yml b/grounding-dino/mmdetection/configs/paa/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..078b974971d3a3faf537cc52937278488923667e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/metafile.yml
@@ -0,0 +1,111 @@
+Collections:
+ - Name: PAA
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - Probabilistic Anchor Assignment
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2007.08103
+ Title: 'Probabilistic Anchor Assignment with IoU Prediction for Object Detection'
+ README: configs/paa/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.4.0/mmdet/models/detectors/paa.py#L6
+ Version: v2.4.0
+
+Models:
+ - Name: paa_r50_fpn_1x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1x_coco/paa_r50_fpn_1x_coco_20200821-936edec3.pth
+
+ - Name: paa_r50_fpn_1.5x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r50_fpn_1.5x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 18
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_1.5x_coco/paa_r50_fpn_1.5x_coco_20200823-805d6078.pth
+
+ - Name: paa_r50_fpn_2x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r50_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_2x_coco/paa_r50_fpn_2x_coco_20200821-c98bfc4e.pth
+
+ - Name: paa_r50_fpn_mstrain_3x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r50_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 3.7
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r50_fpn_mstrain_3x_coco/paa_r50_fpn_mstrain_3x_coco_20210121_145722-06a6880b.pth
+
+ - Name: paa_r101_fpn_1x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.2
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_1x_coco/paa_r101_fpn_1x_coco_20200821-0a1825a4.pth
+
+ - Name: paa_r101_fpn_2x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 6.2
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_2x_coco/paa_r101_fpn_2x_coco_20200821-6829f96b.pth
+
+ - Name: paa_r101_fpn_mstrain_3x_coco
+ In Collection: PAA
+ Config: configs/paa/paa_r101_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 6.2
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/paa/paa_r101_fpn_mstrain_3x_coco/paa_r101_fpn_mstrain_3x_coco_20210122_084202-83250d22.pth
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..94f1c278dc16c1befbca510ca0ac5ba407969f6d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './paa_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c6136f3bb404df6a6fc18536e6770116738af6c7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_2x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './paa_r101_fpn_1x_coco.py'
+max_epochs = 24
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+
+# training schedule for 2x
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8529dcdb90adb2b02162f4d2268088f5f376fcb0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r101_fpn_ms-3x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './paa_r50_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1.5x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1.5x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ae993b5c4370c8fc3e450f84fb7058528b853727
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1.5x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './paa_r50_fpn_1x_coco.py'
+max_epochs = 18
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[12, 16],
+ gamma=0.1)
+]
+
+# training schedule for 1.5x
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f806a3ea65ffb9ee8b898122fb678b94ef212637
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_1x_coco.py
@@ -0,0 +1,80 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model settings
+model = dict(
+ type='PAA',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output',
+ num_outs=5),
+ bbox_head=dict(
+ type='PAAHead',
+ reg_decoded_bbox=True,
+ score_voting=True,
+ topk=9,
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ octave_base_scale=8,
+ scales_per_octave=1,
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.3),
+ loss_centerness=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=0.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.1,
+ neg_iou_thr=0.1,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6908e4eb97fcfa92a20d486ceab9a7ddfaf480b7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_2x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './paa_r50_fpn_1x_coco.py'
+max_epochs = 24
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+
+# training schedule for 2x
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..fed8b90a0fde7a1d344160a6658be04d1f9c654e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/paa/paa_r50_fpn_ms-3x_coco.py
@@ -0,0 +1,29 @@
+_base_ = './paa_r50_fpn_1x_coco.py'
+max_epochs = 36
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
+
+# training schedule for 3x
+train_cfg = dict(max_epochs=max_epochs)
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/pafpn/README.md b/grounding-dino/mmdetection/configs/pafpn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..36cd6e9fd5d6e31ac94e59c06cc1055be8480d21
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pafpn/README.md
@@ -0,0 +1,34 @@
+# PAFPN
+
+> [Path Aggregation Network for Instance Segmentation](https://arxiv.org/abs/1803.01534)
+
+
+
+## Abstract
+
+The way that information propagates in neural networks is of great importance. In this paper, we propose Path Aggregation Network (PANet) aiming at boosting information flow in proposal-based instance segmentation framework. Specifically, we enhance the entire feature hierarchy with accurate localization signals in lower layers by bottom-up path augmentation, which shortens the information path between lower layers and topmost feature. We present adaptive feature pooling, which links feature grid and all feature levels to make useful information in each feature level propagate directly to following proposal subnetworks. A complementary branch capturing different views for each proposal is created to further improve mask prediction. These improvements are simple to implement, with subtle extra computational overhead. Our PANet reaches the 1st place in the COCO 2017 Challenge Instance Segmentation task and the 2nd place in Object Detection task without large-batch training. It is also state-of-the-art on MVD and Cityscapes.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 4.0 | 17.2 | 37.5 | | [config](./faster-rcnn_r50_pafpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pafpn/faster_rcnn_r50_pafpn_1x_coco/faster_rcnn_r50_pafpn_1x_coco_bbox_mAP-0.375_20200503_105836-b7b4b9bd.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pafpn/faster_rcnn_r50_pafpn_1x_coco/faster_rcnn_r50_pafpn_1x_coco_20200503_105836.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{liu2018path,
+ author = {Shu Liu and
+ Lu Qi and
+ Haifang Qin and
+ Jianping Shi and
+ Jiaya Jia},
+ title = {Path Aggregation Network for Instance Segmentation},
+ booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
+ year = {2018}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/pafpn/faster-rcnn_r50_pafpn_1x_coco.py b/grounding-dino/mmdetection/configs/pafpn/faster-rcnn_r50_pafpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1452baeca7e680b11f9b2ec654abe689d3e53042
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pafpn/faster-rcnn_r50_pafpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ neck=dict(
+ type='PAFPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/pafpn/metafile.yml b/grounding-dino/mmdetection/configs/pafpn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..7772d276ab6f0da685ed8ea5e58efd8fc5164529
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pafpn/metafile.yml
@@ -0,0 +1,38 @@
+Collections:
+ - Name: PAFPN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - PAFPN
+ Paper:
+ URL: https://arxiv.org/abs/1803.01534
+ Title: 'Path Aggregation Network for Instance Segmentation'
+ README: configs/pafpn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/necks/pafpn.py#L11
+ Version: v2.0.0
+
+Models:
+ - Name: faster-rcnn_r50_pafpn_1x_coco
+ In Collection: PAFPN
+ Config: configs/pafpn/faster-rcnn_r50_pafpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.0
+ inference time (ms/im):
+ - value: 58.14
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pafpn/faster_rcnn_r50_pafpn_1x_coco/faster_rcnn_r50_pafpn_1x_coco_bbox_mAP-0.375_20200503_105836-b7b4b9bd.pth
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/README.md b/grounding-dino/mmdetection/configs/panoptic_fpn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..0321fb7ce1db42868c7753ce56fb330fef7e4764
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/README.md
@@ -0,0 +1,62 @@
+# Panoptic FPN
+
+> [Panoptic feature pyramid networks](https://arxiv.org/abs/1901.02446)
+
+
+
+## Abstract
+
+The recently introduced panoptic segmentation task has renewed our community's interest in unifying the tasks of instance segmentation (for thing classes) and semantic segmentation (for stuff classes). However, current state-of-the-art methods for this joint task use separate and dissimilar networks for instance and semantic segmentation, without performing any shared computation. In this work, we aim to unify these methods at the architectural level, designing a single network for both tasks. Our approach is to endow Mask R-CNN, a popular instance segmentation method, with a semantic segmentation branch using a shared Feature Pyramid Network (FPN) backbone. Surprisingly, this simple baseline not only remains effective for instance segmentation, but also yields a lightweight, top-performing method for semantic segmentation. In this work, we perform a detailed study of this minimally extended version of Mask R-CNN with FPN, which we refer to as Panoptic FPN, and show it is a robust and accurate baseline for both tasks. Given its effectiveness and conceptual simplicity, we hope our method can serve as a strong baseline and aid future research in panoptic segmentation.
+
+
+
+ +
+
+
+## Dataset
+
+PanopticFPN requires COCO and [COCO-panoptic](http://images.cocodataset.org/annotations/panoptic_annotations_trainval2017.zip) dataset for training and evaluation. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+│ │ │ ├── panoptic_train2017.json
+│ │ │ ├── panoptic_train2017
+│ │ │ ├── panoptic_val2017.json
+│ │ │ ├── panoptic_val2017
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+```
+
+## Results and Models
+
+| Backbone | style | Lr schd | Mem (GB) | Inf time (fps) | PQ | SQ | RQ | PQ_th | SQ_th | RQ_th | PQ_st | SQ_st | RQ_st | Config | Download |
+| :-------: | :-----: | :-----: | :------: | :------------: | :--: | :--: | :--: | :---: | :---: | :---: | :---: | :---: | :---: | :---------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 4.7 | | 40.2 | 77.8 | 49.3 | 47.8 | 80.9 | 57.5 | 28.9 | 73.1 | 37.0 | [config](./panoptic-fpn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_1x_coco/panoptic_fpn_r50_fpn_1x_coco_20210821_101153-9668fd13.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_1x_coco/panoptic_fpn_r50_fpn_1x_coco_20210821_101153.log.json) |
+| R-50-FPN | pytorch | 3x | - | - | 42.5 | 78.1 | 51.7 | 50.3 | 81.5 | 60.3 | 30.7 | 73.0 | 38.8 | [config](./panoptic-fpn_r50_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_mstrain_3x_coco/panoptic_fpn_r50_fpn_mstrain_3x_coco_20210824_171155-5650f98b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_mstrain_3x_coco/panoptic_fpn_r50_fpn_mstrain_3x_coco_20210824_171155.log.json) |
+| R-101-FPN | pytorch | 1x | 6.7 | | 42.2 | 78.3 | 51.4 | 50.1 | 81.4 | 59.9 | 30.3 | 73.6 | 38.5 | [config](./panoptic-fpn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_1x_coco/panoptic_fpn_r101_fpn_1x_coco_20210820_193950-ab9157a2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_1x_coco/panoptic_fpn_r101_fpn_1x_coco_20210820_193950.log.json) |
+| R-101-FPN | pytorch | 3x | - | - | 44.1 | 78.9 | 53.6 | 52.1 | 81.7 | 62.3 | 32.0 | 74.6 | 40.3 | [config](./panoptic-fpn_r101_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_mstrain_3x_coco/panoptic_fpn_r101_fpn_mstrain_3x_coco_20210823_114712-9c99acc4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_mstrain_3x_coco/panoptic_fpn_r101_fpn_mstrain_3x_coco_20210823_114712.log.json) |
+
+## Citation
+
+The base method for panoptic segmentation task.
+
+```latex
+@inproceedings{kirillov2018panopticfpn,
+ author = {
+ Alexander Kirillov,
+ Ross Girshick,
+ Kaiming He,
+ Piotr Dollar,
+ },
+ title = {Panoptic Feature Pyramid Networks},
+ booktitle = {Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
+ year = {2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/metafile.yml b/grounding-dino/mmdetection/configs/panoptic_fpn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c99275ec3f37f47db756b96a4603c466d5fbd946
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/metafile.yml
@@ -0,0 +1,70 @@
+Collections:
+ - Name: PanopticFPN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - PanopticFPN
+ Paper:
+ URL: https://arxiv.org/pdf/1901.02446
+ Title: 'Panoptic feature pyramid networks'
+ README: configs/panoptic_fpn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.16.0/mmdet/models/detectors/panoptic_fpn.py#L7
+ Version: v2.16.0
+
+Models:
+ - Name: panoptic_fpn_r50_fpn_1x_coco
+ In Collection: PanopticFPN
+ Config: configs/panoptic_fpn/panoptic-fpn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.6
+ Epochs: 12
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 40.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_1x_coco/panoptic_fpn_r50_fpn_1x_coco_20210821_101153-9668fd13.pth
+
+ - Name: panoptic_fpn_r50_fpn_mstrain_3x_coco
+ In Collection: PanopticFPN
+ Config: configs/panoptic_fpn/panoptic-fpn_r50_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.6
+ Epochs: 36
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 42.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r50_fpn_mstrain_3x_coco/panoptic_fpn_r50_fpn_mstrain_3x_coco_20210824_171155-5650f98b.pth
+
+ - Name: panoptic_fpn_r101_fpn_1x_coco
+ In Collection: PanopticFPN
+ Config: configs/panoptic_fpn/panoptic-fpn_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.5
+ Epochs: 12
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 42.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_1x_coco/panoptic_fpn_r101_fpn_1x_coco_20210820_193950-ab9157a2.pth
+
+ - Name: panoptic_fpn_r101_fpn_mstrain_3x_coco
+ In Collection: PanopticFPN
+ Config: configs/panoptic_fpn/panoptic-fpn_r101_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 6.5
+ Epochs: 36
+ Results:
+ - Task: Panoptic Segmentation
+ Dataset: COCO
+ Metrics:
+ PQ: 44.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/panoptic_fpn/panoptic_fpn_r101_fpn_mstrain_3x_coco/panoptic_fpn_r101_fpn_mstrain_3x_coco_20210823_114712-9c99acc4.pth
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b960254ef5ecfac1de790a66a5378535114e9ba3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './panoptic-fpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..268782ee2cca31796e43423300319176556cfef7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r101_fpn_ms-3x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './panoptic-fpn_r50_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c2c89ef520124a43c910b35a4808153e4c455d3a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_1x_coco.py
@@ -0,0 +1,45 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_panoptic.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ type='PanopticFPN',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ pad_mask=True,
+ mask_pad_value=0,
+ pad_seg=True,
+ seg_pad_value=255),
+ semantic_head=dict(
+ type='PanopticFPNHead',
+ num_things_classes=80,
+ num_stuff_classes=53,
+ in_channels=256,
+ inner_channels=128,
+ start_level=0,
+ end_level=4,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True),
+ conv_cfg=None,
+ loss_seg=dict(
+ type='CrossEntropyLoss', ignore_index=255, loss_weight=0.5)),
+ panoptic_fusion_head=dict(
+ type='HeuristicFusionHead',
+ num_things_classes=80,
+ num_stuff_classes=53),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.6,
+ nms=dict(type='nms', iou_threshold=0.5, class_agnostic=True),
+ max_per_img=100,
+ mask_thr_binary=0.5),
+ # used in HeuristicFusionHead
+ panoptic=dict(mask_overlap=0.5, stuff_area_limit=4096)))
+
+# Forced to remove NumClassCheckHook
+custom_hooks = []
diff --git a/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b18a8f8dd7eb6c49e277346ffe71c6e36c9d3b68
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/panoptic_fpn/panoptic-fpn_r50_fpn_ms-3x_coco.py
@@ -0,0 +1,35 @@
+_base_ = './panoptic-fpn_r50_fpn_1x_coco.py'
+
+# In mstrain 3x config, img_scale=[(1333, 640), (1333, 800)],
+# multiscale_mode='range'
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(
+ type='LoadPanopticAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ with_seg=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# TODO: Use RepeatDataset to speed up training
+# training schedule for 3x
+train_cfg = dict(max_epochs=36, val_interval=3)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=36,
+ by_epoch=True,
+ milestones=[24, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/README.md b/grounding-dino/mmdetection/configs/pascal_voc/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..2ead3add79ec914d9720562ce4c4c121fac15a7e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/README.md
@@ -0,0 +1,40 @@
+# Pascal VOC
+
+> [The Pascal Visual Object Classes (VOC) Challenge](https://link.springer.com/article/10.1007/s11263-009-0275-4)
+
+
+
+## Abstract
+
+The Pascal Visual Object Classes (VOC) challenge is a benchmark in visual object category recognition and detection, providing the vision and machine learning communities with a standard dataset of images and annotation, and standard evaluation procedures. Organised annually from 2005 to present, the challenge and its associated dataset has become accepted as the benchmark for object detection.
+
+This paper describes the dataset and evaluation procedure. We review the state-of-the-art in evaluated methods for both classification and detection, analyse whether the methods are statistically different, what they are learning from the images (e.g. the object or its context), and what the methods find easy or confuse. The paper concludes with lessons learnt in the three year history of the challenge, and proposes directions for future improvement and extension.
+
+
+
+ +
+
+
+## Results and Models
+
+| Architecture | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------: | :------: | :-----: | :-----: | :------: | :------------: | :----: | :----------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN C4 | R-50 | caffe | 18k | | - | 80.9 | [config](./faster-rcnn_r50-caffe-c4_ms-18k_voc0712.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/faster_rcnn_r50_caffe_c4_mstrain_18k_voc0712//home/dong/code_sensetime/2022Q1/mmdetection/work_dirs/prepare_voc/gather/pascal_voc/faster_rcnn_r50_caffe_c4_mstrain_18k_voc0712/faster_rcnn_r50_caffe_c4_mstrain_18k_voc0712_20220314_234327-847a14d2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/faster_rcnn_r50_caffe_c4_mstrain_18k_voc0712/faster_rcnn_r50_caffe_c4_mstrain_18k_voc0712_20220314_234327.log.json) |
+| Faster R-CNN | R-50 | pytorch | 1x | 2.6 | - | 80.4 | [config](./faster-rcnn_r50_fpn_1x_voc0712.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/faster_rcnn_r50_fpn_1x_voc0712/faster_rcnn_r50_fpn_1x_voc0712_20220320_192712-54bef0f3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/faster_rcnn_r50_fpn_1x_voc0712/faster_rcnn_r50_fpn_1x_voc0712_20220320_192712.log.json) |
+| Retinanet | R-50 | pytorch | 1x | 2.1 | - | 77.3 | [config](./retinanet_r50_fpn_1x_voc0712.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/retinanet_r50_fpn_1x_voc0712/retinanet_r50_fpn_1x_voc0712_20200617-47cbdd0e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/retinanet_r50_fpn_1x_voc0712/retinanet_r50_fpn_1x_voc0712_20200616_014642.log.json) |
+| SSD300 | VGG16 | - | 120e | - | - | 76.5 | [config](./ssd300_voc0712.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/ssd300_voc0712/ssd300_voc0712_20220320_194658-17edda1b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/ssd300_voc0712/ssd300_voc0712_20220320_194658.log.json) |
+| SSD512 | VGG16 | - | 120e | - | - | 79.5 | [config](./ssd512_voc0712.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/ssd512_voc0712/ssd512_voc0712_20220320_194717-03cefefe.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pascal_voc/ssd512_voc0712/ssd512_voc0712_20220320_194717.log.json) |
+
+## Citation
+
+```latex
+@Article{Everingham10,
+ author = "Everingham, M. and Van~Gool, L. and Williams, C. K. I. and Winn, J. and Zisserman, A.",
+ title = "The Pascal Visual Object Classes (VOC) Challenge",
+ journal = "International Journal of Computer Vision",
+ volume = "88",
+ year = "2010",
+ number = "2",
+ month = jun,
+ pages = "303--338",
+}
+```
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50-caffe-c4_ms-18k_voc0712.py b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50-caffe-c4_ms-18k_voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..dddc0bbdf33948478e11bb701f844a8473ddf165
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50-caffe-c4_ms-18k_voc0712.py
@@ -0,0 +1,86 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50-caffe-c4.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/datasets/voc0712.py',
+ '../_base_/default_runtime.py'
+]
+model = dict(roi_head=dict(bbox_head=dict(num_classes=20)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 480), (1333, 512), (1333, 544), (1333, 576),
+ (1333, 608), (1333, 640), (1333, 672), (1333, 704),
+ (1333, 736), (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ sampler=dict(type='InfiniteSampler', shuffle=True),
+ dataset=dict(
+ _delete_=True,
+ type='ConcatDataset',
+ datasets=[
+ dict(
+ type='VOCDataset',
+ data_root={{_base_.data_root}},
+ ann_file='VOC2007/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2007/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args={{_base_.backend_args}}),
+ dict(
+ type='VOCDataset',
+ data_root={{_base_.data_root}},
+ ann_file='VOC2012/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2012/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args={{_base_.backend_args}})
+ ]))
+
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# training schedule for 18k
+max_iter = 18000
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=max_iter,
+ val_interval=3000)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=100),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_iter,
+ by_epoch=False,
+ milestones=[12000, 16000],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001))
+
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=3000))
+log_processor = dict(by_epoch=False)
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712-cocofmt.py b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712-cocofmt.py
new file mode 100644
index 0000000000000000000000000000000000000000..0b0aa41d67fc4edfde6d534e2e54a135f5de6e44
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712-cocofmt.py
@@ -0,0 +1,100 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/datasets/voc0712.py',
+ '../_base_/default_runtime.py'
+]
+model = dict(roi_head=dict(bbox_head=dict(num_classes=20)))
+
+METAINFO = {
+ 'classes':
+ ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat',
+ 'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person',
+ 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'),
+ # palette is a list of color tuples, which is used for visualization.
+ 'palette': [(106, 0, 228), (119, 11, 32), (165, 42, 42), (0, 0, 192),
+ (197, 226, 255), (0, 60, 100), (0, 0, 142), (255, 77, 255),
+ (153, 69, 1), (120, 166, 157), (0, 182, 199), (0, 226, 252),
+ (182, 182, 255), (0, 0, 230), (220, 20, 60), (163, 255, 0),
+ (0, 82, 0), (3, 95, 161), (0, 80, 100), (183, 130, 88)]
+}
+
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/VOCdevkit/'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1000, 600), keep_ratio=True),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ dataset=dict(
+ type='RepeatDataset',
+ times=3,
+ dataset=dict(
+ _delete_=True,
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/voc0712_trainval.json',
+ data_prefix=dict(img=''),
+ metainfo=METAINFO,
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args={{_base_.backend_args}})))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ ann_file='annotations/voc07_test.json',
+ data_prefix=dict(img=''),
+ metainfo=METAINFO,
+ pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/voc07_test.json',
+ metric='bbox',
+ format_only=False,
+ backend_args={{_base_.backend_args}})
+test_evaluator = val_evaluator
+
+# training schedule, the dataset is repeated 3 times, so the
+# actual epoch = 4 * 3 = 12
+max_epochs = 4
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[3],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712.py b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..07391667b35c9db9e352a03624411bb568f5396a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/faster-rcnn_r50_fpn_1x_voc0712.py
@@ -0,0 +1,35 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/datasets/voc0712.py',
+ '../_base_/default_runtime.py'
+]
+model = dict(roi_head=dict(bbox_head=dict(num_classes=20)))
+
+# training schedule, voc dataset is repeated 3 times, in
+# `_base_/datasets/voc0712.py`, so the actual epoch = 4 * 3 = 12
+max_epochs = 4
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[3],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/retinanet_r50_fpn_1x_voc0712.py b/grounding-dino/mmdetection/configs/pascal_voc/retinanet_r50_fpn_1x_voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..c86a6f199c9317804692189975f3abaff24f6aff
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/retinanet_r50_fpn_1x_voc0712.py
@@ -0,0 +1,34 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py', '../_base_/datasets/voc0712.py',
+ '../_base_/default_runtime.py'
+]
+model = dict(bbox_head=dict(num_classes=20))
+
+# training schedule, voc dataset is repeated 3 times, in
+# `_base_/datasets/voc0712.py`, so the actual epoch = 4 * 3 = 12
+max_epochs = 4
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[3],
+ gamma=0.1)
+]
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# Default setting for scaling LR automatically
+# - `enable` means enable scaling LR automatically
+# or not by default.
+# - `base_batch_size` = (8 GPUs) x (2 samples per GPU).
+auto_scale_lr = dict(enable=False, base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/ssd300_voc0712.py b/grounding-dino/mmdetection/configs/pascal_voc/ssd300_voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..ff7a1368b76aa53700bd81a912b54e84ab58e53a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/ssd300_voc0712.py
@@ -0,0 +1,102 @@
+_base_ = [
+ '../_base_/models/ssd300.py', '../_base_/datasets/voc0712.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ bbox_head=dict(
+ num_classes=20, anchor_generator=dict(basesize_ratio_range=(0.2,
+ 0.9))))
+# dataset settings
+dataset_type = 'VOCDataset'
+data_root = 'data/VOCdevkit/'
+input_size = 300
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='Expand',
+ mean={{_base_.model.data_preprocessor.mean}},
+ to_rgb={{_base_.model.data_preprocessor.bgr_to_rgb}},
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=3,
+ dataset=dict( # RepeatDataset
+ # the dataset is repeated 10 times, and the training schedule is 2x,
+ # so the actual epoch = 12 * 10 = 120.
+ times=10,
+ dataset=dict( # ConcatDataset
+ # VOCDataset will add different `dataset_type` in dataset.metainfo,
+ # which will get error if using ConcatDataset. Adding
+ # `ignore_keys` can avoid this error.
+ ignore_keys=['dataset_type'],
+ datasets=[
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2007/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2007/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline),
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2012/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2012/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline)
+ ])))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+custom_hooks = [
+ dict(type='NumClassCheckHook'),
+ dict(type='CheckInvalidLossHook', interval=50, priority='VERY_LOW')
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=1e-3, momentum=0.9, weight_decay=5e-4))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[16, 20],
+ gamma=0.1)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/pascal_voc/ssd512_voc0712.py b/grounding-dino/mmdetection/configs/pascal_voc/ssd512_voc0712.py
new file mode 100644
index 0000000000000000000000000000000000000000..6c4dc8a3eec86ccced7d44120b254463d18c00f5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pascal_voc/ssd512_voc0712.py
@@ -0,0 +1,82 @@
+_base_ = 'ssd300_voc0712.py'
+
+input_size = 512
+model = dict(
+ neck=dict(
+ out_channels=(512, 1024, 512, 256, 256, 256, 256),
+ level_strides=(2, 2, 2, 2, 1),
+ level_paddings=(1, 1, 1, 1, 1),
+ last_kernel_size=4),
+ bbox_head=dict(
+ in_channels=(512, 1024, 512, 256, 256, 256, 256),
+ anchor_generator=dict(
+ input_size=input_size,
+ strides=[8, 16, 32, 64, 128, 256, 512],
+ basesize_ratio_range=(0.15, 0.9),
+ ratios=([2], [2, 3], [2, 3], [2, 3], [2, 3], [2], [2]))))
+
+# dataset settings
+dataset_type = 'VOCDataset'
+data_root = 'data/VOCdevkit/'
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='Expand',
+ mean={{_base_.model.data_preprocessor.mean}},
+ to_rgb={{_base_.model.data_preprocessor.bgr_to_rgb}},
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ # avoid bboxes being resized
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=3,
+ dataset=dict( # RepeatDataset
+ # the dataset is repeated 10 times, and the training schedule is 2x,
+ # so the actual epoch = 12 * 10 = 120.
+ times=10,
+ dataset=dict( # ConcatDataset
+ # VOCDataset will add different `dataset_type` in dataset.metainfo,
+ # which will get error if using ConcatDataset. Adding
+ # `ignore_keys` can avoid this error.
+ ignore_keys=['dataset_type'],
+ datasets=[
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2007/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2007/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline),
+ dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='VOC2012/ImageSets/Main/trainval.txt',
+ data_prefix=dict(sub_data_root='VOC2012/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline)
+ ])))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/pisa/README.md b/grounding-dino/mmdetection/configs/pisa/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..39f79ecd1b9b007b6bbf1417e6fd809d47141470
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/README.md
@@ -0,0 +1,50 @@
+# PISA
+
+> [Prime Sample Attention in Object Detection](https://arxiv.org/abs/1904.04821)
+
+
+
+## Abstract
+
+It is a common paradigm in object detection frameworks to treat all samples equally and target at maximizing the performance on average. In this work, we revisit this paradigm through a careful study on how different samples contribute to the overall performance measured in terms of mAP. Our study suggests that the samples in each mini-batch are neither independent nor equally important, and therefore a better classifier on average does not necessarily mean higher mAP. Motivated by this study, we propose the notion of Prime Samples, those that play a key role in driving the detection performance. We further develop a simple yet effective sampling and learning strategy called PrIme Sample Attention (PISA) that directs the focus of the training process towards such samples. Our experiments demonstrate that it is often more effective to focus on prime samples than hard samples when training a detector. Particularly, On the MSCOCO dataset, PISA outperforms the random sampling baseline and hard mining schemes, e.g., OHEM and Focal Loss, consistently by around 2% on both single-stage and two-stage detectors, even with a strong backbone ResNeXt-101.
+
+
+
+ +
+
+
+## Results and Models
+
+| PISA | Network | Backbone | Lr schd | box AP | mask AP | Config | Download |
+| :--: | :----------: | :------------: | :-----: | :----: | :-----: | :----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| × | Faster R-CNN | R-50-FPN | 1x | 36.4 | | - | |
+| √ | Faster R-CNN | R-50-FPN | 1x | 38.4 | | [config](./faster-rcnn_r50_fpn_pisa_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_r50_fpn_1x_coco/pisa_faster_rcnn_r50_fpn_1x_coco-dea93523.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_r50_fpn_1x_coco/pisa_faster_rcnn_r50_fpn_1x_coco_20200506_185619.log.json) |
+| × | Faster R-CNN | X101-32x4d-FPN | 1x | 40.1 | | - | |
+| √ | Faster R-CNN | X101-32x4d-FPN | 1x | 41.9 | | [config](./faster-rcnn_x101-32x4d_fpn_pisa_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco-e4accec4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco_20200505_181503.log.json) |
+| × | Mask R-CNN | R-50-FPN | 1x | 37.3 | 34.2 | - | |
+| √ | Mask R-CNN | R-50-FPN | 1x | 39.1 | 35.2 | [config](./mask-rcnn_r50_fpn_pisa_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_mask_rcnn_r50_fpn_1x_coco/pisa_mask_rcnn_r50_fpn_1x_coco-dfcedba6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_mask_rcnn_r50_fpn_1x_coco/pisa_mask_rcnn_r50_fpn_1x_coco_20200508_150500.log.json) |
+| × | Mask R-CNN | X101-32x4d-FPN | 1x | 41.1 | 37.1 | - | |
+| √ | Mask R-CNN | X101-32x4d-FPN | 1x | | | | |
+| × | RetinaNet | R-50-FPN | 1x | 35.6 | | - | |
+| √ | RetinaNet | R-50-FPN | 1x | 36.9 | | [config](./retinanet-r50_fpn_pisa_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_r50_fpn_1x_coco/pisa_retinanet_r50_fpn_1x_coco-76409952.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_r50_fpn_1x_coco/pisa_retinanet_r50_fpn_1x_coco_20200504_014311.log.json) |
+| × | RetinaNet | X101-32x4d-FPN | 1x | 39.0 | | - | |
+| √ | RetinaNet | X101-32x4d-FPN | 1x | 40.7 | | [config](./retinanet_x101-32x4d_fpn_pisa_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_x101_32x4d_fpn_1x_coco/pisa_retinanet_x101_32x4d_fpn_1x_coco-a0c13c73.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_x101_32x4d_fpn_1x_coco/pisa_retinanet_x101_32x4d_fpn_1x_coco_20200505_001404.log.json) |
+| × | SSD300 | VGG16 | 1x | 25.6 | | - | |
+| √ | SSD300 | VGG16 | 1x | 27.6 | | [config](./ssd300_pisa_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd300_coco/pisa_ssd300_coco-710e3ac9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd300_coco/pisa_ssd300_coco_20200504_144325.log.json) |
+| × | SSD512 | VGG16 | 1x | 29.3 | | - | |
+| √ | SSD512 | VGG16 | 1x | 31.8 | | [config](./ssd512_pisa_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd512_coco/pisa_ssd512_coco-247addee.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd512_coco/pisa_ssd512_coco_20200508_131030.log.json) |
+
+**Notes:**
+
+- In the original paper, all models are trained and tested on mmdet v1.x, thus results may not be exactly the same with this release on v2.0.
+- It is noted PISA only modifies the training pipeline so the inference time remains the same with the baseline.
+
+## Citation
+
+```latex
+@inproceedings{cao2019prime,
+ title={Prime sample attention in object detection},
+ author={Cao, Yuhang and Chen, Kai and Loy, Chen Change and Lin, Dahua},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/pisa/faster-rcnn_r50_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/faster-rcnn_r50_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..237a3b13aa5e61f04579670af01df8f481d80dd1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/faster-rcnn_r50_fpn_pisa_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ roi_head=dict(
+ type='PISARoIHead',
+ bbox_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ sampler=dict(
+ type='ScoreHLRSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True,
+ k=0.5,
+ bias=0.),
+ isr=dict(k=2, bias=0),
+ carl=dict(k=1, bias=0.2))),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/pisa/faster-rcnn_x101-32x4d_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/faster-rcnn_x101-32x4d_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4b2c8d9a20ac7adf1965bb3d98e868c785cb23c3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/faster-rcnn_x101-32x4d_fpn_pisa_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = '../faster_rcnn/faster-rcnn_x101-32x4d_fpn_1x_coco.py'
+
+model = dict(
+ roi_head=dict(
+ type='PISARoIHead',
+ bbox_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ sampler=dict(
+ type='ScoreHLRSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True,
+ k=0.5,
+ bias=0.),
+ isr=dict(k=2, bias=0),
+ carl=dict(k=1, bias=0.2))),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/pisa/mask-rcnn_r50_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/mask-rcnn_r50_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d6a6823591b1d7780c7f9d49029579afede239aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/mask-rcnn_r50_fpn_pisa_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+
+model = dict(
+ roi_head=dict(
+ type='PISARoIHead',
+ bbox_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ sampler=dict(
+ type='ScoreHLRSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True,
+ k=0.5,
+ bias=0.),
+ isr=dict(k=2, bias=0),
+ carl=dict(k=1, bias=0.2))),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/pisa/mask-rcnn_x101-32x4d_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/mask-rcnn_x101-32x4d_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f2ac19fe75ba8c5b2440772eced16397e2273735
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/mask-rcnn_x101-32x4d_fpn_pisa_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = '../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py'
+
+model = dict(
+ roi_head=dict(
+ type='PISARoIHead',
+ bbox_head=dict(
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))),
+ train_cfg=dict(
+ rpn_proposal=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0),
+ rcnn=dict(
+ sampler=dict(
+ type='ScoreHLRSampler',
+ num=512,
+ pos_fraction=0.25,
+ neg_pos_ub=-1,
+ add_gt_as_proposals=True,
+ k=0.5,
+ bias=0.),
+ isr=dict(k=2, bias=0),
+ carl=dict(k=1, bias=0.2))),
+ test_cfg=dict(
+ rpn=dict(
+ nms_pre=2000,
+ max_per_img=2000,
+ nms=dict(type='nms', iou_threshold=0.7),
+ min_bbox_size=0)))
diff --git a/grounding-dino/mmdetection/configs/pisa/metafile.yml b/grounding-dino/mmdetection/configs/pisa/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3be5c3baf6d386d246b8fdc39035245d7dbbaad5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/metafile.yml
@@ -0,0 +1,110 @@
+Collections:
+ - Name: PISA
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - PISA
+ - RPN
+ - ResNet
+ - RoIPool
+ Paper:
+ URL: https://arxiv.org/abs/1904.04821
+ Title: 'Prime Sample Attention in Object Detection'
+ README: configs/pisa/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/roi_heads/pisa_roi_head.py#L8
+ Version: v2.1.0
+
+Models:
+ - Name: pisa_faster_rcnn_r50_fpn_1x_coco
+ In Collection: PISA
+ Config: configs/pisa/faster-rcnn_r50_fpn_pisa_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_r50_fpn_1x_coco/pisa_faster_rcnn_r50_fpn_1x_coco-dea93523.pth
+
+ - Name: pisa_faster_rcnn_x101_32x4d_fpn_1x_coco
+ In Collection: PISA
+ Config: configs/pisa/faster-rcnn_x101-32x4d_fpn_pisa_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco/pisa_faster_rcnn_x101_32x4d_fpn_1x_coco-e4accec4.pth
+
+ - Name: pisa_mask_rcnn_r50_fpn_1x_coco
+ In Collection: PISA
+ Config: configs/pisa/mask-rcnn_r50_fpn_pisa_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 35.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_mask_rcnn_r50_fpn_1x_coco/pisa_mask_rcnn_r50_fpn_1x_coco-dfcedba6.pth
+
+ - Name: pisa_retinanet_r50_fpn_1x_coco
+ In Collection: PISA
+ Config: configs/pisa/retinanet-r50_fpn_pisa_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_r50_fpn_1x_coco/pisa_retinanet_r50_fpn_1x_coco-76409952.pth
+
+ - Name: pisa_retinanet_x101_32x4d_fpn_1x_coco
+ In Collection: PISA
+ Config: configs/pisa/retinanet_x101-32x4d_fpn_pisa_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_retinanet_x101_32x4d_fpn_1x_coco/pisa_retinanet_x101_32x4d_fpn_1x_coco-a0c13c73.pth
+
+ - Name: pisa_ssd300_coco
+ In Collection: PISA
+ Config: configs/pisa/ssd300_pisa_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 27.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd300_coco/pisa_ssd300_coco-710e3ac9.pth
+
+ - Name: pisa_ssd512_coco
+ In Collection: PISA
+ Config: configs/pisa/ssd512_pisa_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 31.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pisa/pisa_ssd512_coco/pisa_ssd512_coco-247addee.pth
diff --git a/grounding-dino/mmdetection/configs/pisa/retinanet-r50_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/retinanet-r50_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..70f89e227ec64b5c7224375aac0cf7ae3a10a29e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/retinanet-r50_fpn_pisa_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = '../retinanet/retinanet_r50_fpn_1x_coco.py'
+
+model = dict(
+ bbox_head=dict(
+ type='PISARetinaHead',
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.11, loss_weight=1.0)),
+ train_cfg=dict(isr=dict(k=2., bias=0.), carl=dict(k=1., bias=0.2)))
diff --git a/grounding-dino/mmdetection/configs/pisa/retinanet_x101-32x4d_fpn_pisa_1x_coco.py b/grounding-dino/mmdetection/configs/pisa/retinanet_x101-32x4d_fpn_pisa_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9caad45d34a9cde84a3c29ad45e3080bb831bb76
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/retinanet_x101-32x4d_fpn_pisa_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = '../retinanet/retinanet_x101-32x4d_fpn_1x_coco.py'
+
+model = dict(
+ bbox_head=dict(
+ type='PISARetinaHead',
+ loss_bbox=dict(type='SmoothL1Loss', beta=0.11, loss_weight=1.0)),
+ train_cfg=dict(isr=dict(k=2., bias=0.), carl=dict(k=1., bias=0.2)))
diff --git a/grounding-dino/mmdetection/configs/pisa/ssd300_pisa_coco.py b/grounding-dino/mmdetection/configs/pisa/ssd300_pisa_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b10236baeb1925483c2fdb025d86c45d51ba0276
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/ssd300_pisa_coco.py
@@ -0,0 +1,7 @@
+_base_ = '../ssd/ssd300_coco.py'
+
+model = dict(
+ bbox_head=dict(type='PISASSDHead'),
+ train_cfg=dict(isr=dict(k=2., bias=0.), carl=dict(k=1., bias=0.2)))
+
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/pisa/ssd512_pisa_coco.py b/grounding-dino/mmdetection/configs/pisa/ssd512_pisa_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..939c7f453d4d881324c3b0443b0696eb96b3df4f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pisa/ssd512_pisa_coco.py
@@ -0,0 +1,7 @@
+_base_ = '../ssd/ssd512_coco.py'
+
+model = dict(
+ bbox_head=dict(type='PISASSDHead'),
+ train_cfg=dict(isr=dict(k=2., bias=0.), carl=dict(k=1., bias=0.2)))
+
+optim_wrapper = dict(clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/point_rend/README.md b/grounding-dino/mmdetection/configs/point_rend/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..efa1dcac214adafb6f7a9b9c6aba97e9ecd7b51c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/point_rend/README.md
@@ -0,0 +1,33 @@
+# PointRend
+
+> [PointRend: Image Segmentation as Rendering](https://arxiv.org/abs/1912.08193)
+
+
+
+## Abstract
+
+We present a new method for efficient high-quality image segmentation of objects and scenes. By analogizing classical computer graphics methods for efficient rendering with over- and undersampling challenges faced in pixel labeling tasks, we develop a unique perspective of image segmentation as a rendering problem. From this vantage, we present the PointRend (Point-based Rendering) neural network module: a module that performs point-based segmentation predictions at adaptively selected locations based on an iterative subdivision algorithm. PointRend can be flexibly applied to both instance and semantic segmentation tasks by building on top of existing state-of-the-art models. While many concrete implementations of the general idea are possible, we show that a simple design already achieves excellent results. Qualitatively, PointRend outputs crisp object boundaries in regions that are over-smoothed by previous methods. Quantitatively, PointRend yields significant gains on COCO and Cityscapes, for both instance and semantic segmentation. PointRend's efficiency enables output resolutions that are otherwise impractical in terms of memory or computation compared to existing approaches.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :------: | :---: | :-----: | :------: | :------------: | :----: | :-----: | :------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | caffe | 1x | 4.6 | | 38.4 | 36.3 | [config](./point-rend_r50-caffe_fpn_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_1x_coco/point_rend_r50_caffe_fpn_mstrain_1x_coco-1bcb5fb4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_1x_coco/point_rend_r50_caffe_fpn_mstrain_1x_coco_20200612_161407.log.json) |
+| R-50-FPN | caffe | 3x | 4.6 | | 41.0 | 38.0 | [config](./point-rend_r50-caffe_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_3x_coco/point_rend_r50_caffe_fpn_mstrain_3x_coco-e0ebb6b7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_3x_coco/point_rend_r50_caffe_fpn_mstrain_3x_coco_20200614_002632.log.json) |
+
+Note: All models are trained with multi-scale, the input image shorter side is randomly scaled to one of (640, 672, 704, 736, 768, 800).
+
+## Citation
+
+```latex
+@InProceedings{kirillov2019pointrend,
+ title={{PointRend}: Image Segmentation as Rendering},
+ author={Alexander Kirillov and Yuxin Wu and Kaiming He and Ross Girshick},
+ journal={ArXiv:1912.08193},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/point_rend/metafile.yml b/grounding-dino/mmdetection/configs/point_rend/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..f54f8a860b7951c1e99471b1f10e69c4685d998b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/point_rend/metafile.yml
@@ -0,0 +1,54 @@
+Collections:
+ - Name: PointRend
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - PointRend
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1912.08193
+ Title: 'PointRend: Image Segmentation as Rendering'
+ README: configs/point_rend/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.2.0/mmdet/models/detectors/point_rend.py#L6
+ Version: v2.2.0
+
+Models:
+ - Name: point_rend_r50_caffe_fpn_mstrain_1x_coco
+ In Collection: PointRend
+ Config: configs/point_rend/point-rend_r50-caffe_fpn_ms-1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.6
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_1x_coco/point_rend_r50_caffe_fpn_mstrain_1x_coco-1bcb5fb4.pth
+
+ - Name: point_rend_r50_caffe_fpn_mstrain_3x_coco
+ In Collection: PointRend
+ Config: configs/point_rend/point-rend_r50-caffe_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.6
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/point_rend/point_rend_r50_caffe_fpn_mstrain_3x_coco/point_rend_r50_caffe_fpn_mstrain_3x_coco-e0ebb6b7.pth
diff --git a/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-1x_coco.py b/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8b17f5a340bad54a8fe9b366ccc7d5574f687b17
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-1x_coco.py
@@ -0,0 +1,44 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-1x_coco.py'
+# model settings
+model = dict(
+ type='PointRend',
+ roi_head=dict(
+ type='PointRendRoIHead',
+ mask_roi_extractor=dict(
+ type='GenericRoIExtractor',
+ aggregation='concat',
+ roi_layer=dict(
+ _delete_=True, type='SimpleRoIAlign', output_size=14),
+ out_channels=256,
+ featmap_strides=[4]),
+ mask_head=dict(
+ _delete_=True,
+ type='CoarseMaskHead',
+ num_fcs=2,
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ num_classes=80,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0)),
+ point_head=dict(
+ type='MaskPointHead',
+ num_fcs=3,
+ in_channels=256,
+ fc_channels=256,
+ num_classes=80,
+ coarse_pred_each_layer=True,
+ loss_point=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))),
+ # model training and testing settings
+ train_cfg=dict(
+ rcnn=dict(
+ mask_size=7,
+ num_points=14 * 14,
+ oversample_ratio=3,
+ importance_sample_ratio=0.75)),
+ test_cfg=dict(
+ rcnn=dict(
+ subdivision_steps=5,
+ subdivision_num_points=28 * 28,
+ scale_factor=2)))
diff --git a/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b11faaa98ebc5b61f086a2297debda6769dc6270
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/point_rend/point-rend_r50-caffe_fpn_ms-3x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './point-rend_r50-caffe_fpn_ms-1x_coco.py'
+
+max_epochs = 36
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/pvt/README.md b/grounding-dino/mmdetection/configs/pvt/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..fccad4f6b8b7e6ac89e937fac6d7858ecbfa881b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/README.md
@@ -0,0 +1,57 @@
+# PVT
+
+> [Pyramid vision transformer: A versatile backbone for dense prediction without convolutions](https://arxiv.org/abs/2102.12122)
+
+
+
+## Abstract
+
+Although using convolutional neural networks (CNNs) as backbones achieves great successes in computer vision, this work investigates a simple backbone network useful for many dense prediction tasks without convolutions. Unlike the recently-proposed Transformer model (e.g., ViT) that is specially designed for image classification, we propose Pyramid Vision Transformer~(PVT), which overcomes the difficulties of porting Transformer to various dense prediction tasks. PVT has several merits compared to prior arts. (1) Different from ViT that typically has low-resolution outputs and high computational and memory cost, PVT can be not only trained on dense partitions of the image to achieve high output resolution, which is important for dense predictions but also using a progressive shrinking pyramid to reduce computations of large feature maps. (2) PVT inherits the advantages from both CNN and Transformer, making it a unified backbone in various vision tasks without convolutions by simply replacing CNN backbones. (3) We validate PVT by conducting extensive experiments, showing that it boosts the performance of many downstream tasks, e.g., object detection, semantic, and instance segmentation. For example, with a comparable number of parameters, RetinaNet+PVT achieves 40.4 AP on the COCO dataset, surpassing RetinNet+ResNet50 (36.3 AP) by 4.1 absolute AP. We hope PVT could serve as an alternative and useful backbone for pixel-level predictions and facilitate future researches.
+
+Transformer recently has shown encouraging progresses in computer vision. In this work, we present new baselines by improving the original Pyramid Vision Transformer (abbreviated as PVTv1) by adding three designs, including (1) overlapping patch embedding, (2) convolutional feed-forward networks, and (3) linear complexity attention layers.
+With these modifications, our PVTv2 significantly improves PVTv1 on three tasks e.g., classification, detection, and segmentation. Moreover, PVTv2 achieves comparable or better performances than recent works such as Swin Transformer. We hope this work will facilitate state-of-the-art Transformer researches in computer vision.
+
+
+
+ +
+
+
+## Results and Models
+
+### RetinaNet (PVTv1)
+
+| Backbone | Lr schd | Mem (GB) | box AP | Config | Download |
+| :--------: | :-----: | :------: | :----: | :----------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| PVT-Tiny | 12e | 8.5 | 36.6 | [config](./retinanet_pvt-t_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-t_fpn_1x_coco/retinanet_pvt-t_fpn_1x_coco_20210831_103110-17b566bd.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-t_fpn_1x_coco/retinanet_pvt-t_fpn_1x_coco_20210831_103110.log.json) |
+| PVT-Small | 12e | 14.5 | 40.4 | [config](./retinanet_pvt-s_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-s_fpn_1x_coco/retinanet_pvt-s_fpn_1x_coco_20210906_142921-b6c94a5b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-s_fpn_1x_coco/retinanet_pvt-s_fpn_1x_coco_20210906_142921.log.json) |
+| PVT-Medium | 12e | 20.9 | 41.7 | [config](./retinanet_pvt-m_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-m_fpn_1x_coco/retinanet_pvt-m_fpn_1x_coco_20210831_103243-55effa1b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-m_fpn_1x_coco/retinanet_pvt-m_fpn_1x_coco_20210831_103243.log.json) |
+
+### RetinaNet (PVTv2)
+
+| Backbone | Lr schd | Mem (GB) | box AP | Config | Download |
+| :------: | :-----: | :------: | :----: | :-------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| PVTv2-B0 | 12e | 7.4 | 37.1 | [config](./retinanet_pvtv2-b0_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b0_fpn_1x_coco/retinanet_pvtv2-b0_fpn_1x_coco_20210831_103157-13e9aabe.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b0_fpn_1x_coco/retinanet_pvtv2-b0_fpn_1x_coco_20210831_103157.log.json) |
+| PVTv2-B1 | 12e | 9.5 | 41.2 | [config](./retinanet_pvtv2-b1_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b1_fpn_1x_coco/retinanet_pvtv2-b1_fpn_1x_coco_20210831_103318-7e169a7d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b1_fpn_1x_coco/retinanet_pvtv2-b1_fpn_1x_coco_20210831_103318.log.json) |
+| PVTv2-B2 | 12e | 16.2 | 44.6 | [config](./retinanet_pvtv2-b2_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b2_fpn_1x_coco/retinanet_pvtv2-b2_fpn_1x_coco_20210901_174843-529f0b9a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b2_fpn_1x_coco/retinanet_pvtv2-b2_fpn_1x_coco_20210901_174843.log.json) |
+| PVTv2-B3 | 12e | 23.0 | 46.0 | [config](./retinanet_pvtv2-b3_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b3_fpn_1x_coco/retinanet_pvtv2-b3_fpn_1x_coco_20210903_151512-8357deff.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b3_fpn_1x_coco/retinanet_pvtv2-b3_fpn_1x_coco_20210903_151512.log.json) |
+| PVTv2-B4 | 12e | 17.0 | 46.3 | [config](./retinanet_pvtv2-b4_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b4_fpn_1x_coco/retinanet_pvtv2-b4_fpn_1x_coco_20210901_170151-83795c86.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b4_fpn_1x_coco/retinanet_pvtv2-b4_fpn_1x_coco_20210901_170151.log.json) |
+| PVTv2-B5 | 12e | 18.7 | 46.1 | [config](./retinanet_pvtv2-b5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b5_fpn_1x_coco/retinanet_pvtv2-b5_fpn_1x_coco_20210902_201800-3420eb57.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b5_fpn_1x_coco/retinanet_pvtv2-b5_fpn_1x_coco_20210902_201800.log.json) |
+
+## Citation
+
+```latex
+@article{wang2021pyramid,
+ title={Pyramid vision transformer: A versatile backbone for dense prediction without convolutions},
+ author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling},
+ journal={arXiv preprint arXiv:2102.12122},
+ year={2021}
+}
+```
+
+```latex
+@article{wang2021pvtv2,
+ title={PVTv2: Improved Baselines with Pyramid Vision Transformer},
+ author={Wang, Wenhai and Xie, Enze and Li, Xiang and Fan, Deng-Ping and Song, Kaitao and Liang, Ding and Lu, Tong and Luo, Ping and Shao, Ling},
+ journal={arXiv preprint arXiv:2106.13797},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/pvt/metafile.yml b/grounding-dino/mmdetection/configs/pvt/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..58843784955f3f4be7aeebf7caa9b50b7891f4c5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/metafile.yml
@@ -0,0 +1,243 @@
+Models:
+ - Name: retinanet_pvt-t_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvt-t_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformer
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-t_fpn_1x_coco/retinanet_pvt-t_fpn_1x_coco_20210831_103110-17b566bd.pth
+ Paper:
+ URL: https://arxiv.org/abs/2102.12122
+ Title: "Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L315
+ Version: 2.17.0
+
+ - Name: retinanet_pvt-s_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvt-s_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 14.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformer
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-s_fpn_1x_coco/retinanet_pvt-s_fpn_1x_coco_20210906_142921-b6c94a5b.pth
+ Paper:
+ URL: https://arxiv.org/abs/2102.12122
+ Title: "Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L315
+ Version: 2.17.0
+
+ - Name: retinanet_pvt-m_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvt-m_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 20.9
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformer
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvt-m_fpn_1x_coco/retinanet_pvt-m_fpn_1x_coco_20210831_103243-55effa1b.pth
+ Paper:
+ URL: https://arxiv.org/abs/2102.12122
+ Title: "Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L315
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b0_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b0_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.4
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b0_fpn_1x_coco/retinanet_pvtv2-b0_fpn_1x_coco_20210831_103157-13e9aabe.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b1_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b1_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 9.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b1_fpn_1x_coco/retinanet_pvtv2-b1_fpn_1x_coco_20210831_103318-7e169a7d.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b2_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b2_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 16.2
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b2_fpn_1x_coco/retinanet_pvtv2-b2_fpn_1x_coco_20210901_174843-529f0b9a.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b3_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b3_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 23.0
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b3_fpn_1x_coco/retinanet_pvtv2-b3_fpn_1x_coco_20210903_151512-8357deff.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b4_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b4_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 17.0
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b4_fpn_1x_coco/retinanet_pvtv2-b4_fpn_1x_coco_20210901_170151-83795c86.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
+
+ - Name: retinanet_pvtv2-b5_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/pvt/retinanet_pvtv2-b5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 18.7
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x NVIDIA V100 GPUs
+ Architecture:
+ - PyramidVisionTransformerV2
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/pvt/retinanet_pvtv2-b5_fpn_1x_coco/retinanet_pvtv2-b5_fpn_1x_coco_20210902_201800-3420eb57.pth
+ Paper:
+ URL: https://arxiv.org/abs/2106.13797
+ Title: "PVTv2: Improved Baselines with Pyramid Vision Transformer"
+ README: configs/pvt/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.17.0/mmdet/models/backbones/pvt.py#L543
+ Version: 2.17.0
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-l_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-l_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1a6f604bdb367106bc75680808ce6fabc2740ed1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-l_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = 'retinanet_pvt-t_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ num_layers=[3, 8, 27, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_large.pth')))
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(type='AmpOptimWrapper')
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-m_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-m_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b888f788b6c7310491751774238451bb7107dccc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-m_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = 'retinanet_pvt-t_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ num_layers=[3, 4, 18, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_medium.pth')))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-s_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-s_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..46603488bb3ceb4fc1052139da53340a3d595256
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-s_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = 'retinanet_pvt-t_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ num_layers=[3, 4, 6, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_small.pth')))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-t_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-t_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5f67c444f262613d615b8b7331991ca7e2f57935
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvt-t_fpn_1x_coco.py
@@ -0,0 +1,18 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='RetinaNet',
+ backbone=dict(
+ _delete_=True,
+ type='PyramidVisionTransformer',
+ num_layers=[2, 2, 2, 2],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_tiny.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ _delete_=True, type='AdamW', lr=0.0001, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b0_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b0_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cbebf90fb89d81bd2f4c0874dc2c82cf7c7393d0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b0_fpn_1x_coco.py
@@ -0,0 +1,19 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='RetinaNet',
+ backbone=dict(
+ _delete_=True,
+ type='PyramidVisionTransformerV2',
+ embed_dims=32,
+ num_layers=[2, 2, 2, 2],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b0.pth')),
+ neck=dict(in_channels=[32, 64, 160, 256]))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ _delete_=True, type='AdamW', lr=0.0001, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b1_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b1_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5374c50925f5c7ed8a761eda40dc4bf374df3aeb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b1_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = 'retinanet_pvtv2-b0_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ embed_dims=64,
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b1.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b2_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b2_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cf9a18debbe5f8b9918e0d086ad6d54d203ef310
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b2_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = 'retinanet_pvtv2-b0_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ embed_dims=64,
+ num_layers=[3, 4, 6, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b2.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b3_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b3_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7a47f820324af7fecf773640d7d1829b0c115471
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b3_fpn_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = 'retinanet_pvtv2-b0_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ embed_dims=64,
+ num_layers=[3, 4, 18, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b3.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b4_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b4_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5faf4c507ba89ffe614b2b9d34d452e4c106b0fe
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b4_fpn_1x_coco.py
@@ -0,0 +1,20 @@
+_base_ = 'retinanet_pvtv2-b0_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ embed_dims=64,
+ num_layers=[3, 8, 27, 3],
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b4.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ _delete_=True, type='AdamW', lr=0.0001 / 1.4, weight_decay=0.0001))
+
+# dataset settings
+train_dataloader = dict(batch_size=1, num_workers=1)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (1 samples per GPU)
+auto_scale_lr = dict(base_batch_size=8)
diff --git a/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..afff8719ece41dbfbbe23e2259b9973bb29871f6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/pvt/retinanet_pvtv2-b5_fpn_1x_coco.py
@@ -0,0 +1,21 @@
+_base_ = 'retinanet_pvtv2-b0_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ embed_dims=64,
+ num_layers=[3, 6, 40, 3],
+ mlp_ratios=(4, 4, 4, 4),
+ init_cfg=dict(checkpoint='https://github.com/whai362/PVT/'
+ 'releases/download/v2/pvt_v2_b5.pth')),
+ neck=dict(in_channels=[64, 128, 320, 512]))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(
+ _delete_=True, type='AdamW', lr=0.0001 / 1.4, weight_decay=0.0001))
+
+# dataset settings
+train_dataloader = dict(batch_size=1, num_workers=1)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (1 samples per GPU)
+auto_scale_lr = dict(base_batch_size=8)
diff --git a/grounding-dino/mmdetection/configs/qdtrack/README.md b/grounding-dino/mmdetection/configs/qdtrack/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..5a6efe7d3fd62d61b328d8ce248e1fd9132f5792
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/qdtrack/README.md
@@ -0,0 +1,89 @@
+# Quasi-Dense Similarity Learning for Multiple Object Tracking
+
+## Abstract
+
+
+
+Similarity learning has been recognized as a crucial step for object tracking. However, existing multiple object tracking methods only use sparse ground truth matching as the training objective, while ignoring the majority of the informative regions on the images. In this paper, we present Quasi-Dense Similarity Learning, which densely samples hundreds of region proposals on a pair of images for contrastive learning. We can directly combine this similarity learning with existing detection methods to build Quasi-Dense Tracking (QDTrack) without turning to displacementregression or motion priors. We also find that the resulting distinctive feature space admits a simple nearest neighbor search at the inference time. Despite its simplicity, QD-Track outperforms all existing methods on MOT, BDD100K, Waymo, and TAO tracking benchmarks. It achieves 68.7 MOTA at 20.3 FPS on MOT17 without using external training data. Compared to methods with similar detectors, it boosts almost 10 points of MOTA and significantly decreases the number of ID switches on BDD100K and Waymo datasets.
+
+
+
+
+
+  +
+  +
+
+
+## Results and models on MOT17
+
+| Method | Detector | Train Set | Test Set | Public | Inf time (fps) | HOTA | MOTA | IDF1 | FP | FN | IDSw. | Config | Download |
+| :-----: | :----------: | :--------: | :------: | :----: | :------------: | :--: | :--: | :--: | :--: | :---: | :---: | :-------------------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| QDTrack | Faster R-CNN | half-train | half-val | N | - | 57.1 | 68.1 | 68.6 | 7707 | 42732 | 1083 | [config](qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py) | [model](https://download.openmmlab.com/mmtracking/mot/qdtrack/mot_dataset/qdtrack_faster-rcnn_r50_fpn_4e_mot17_20220315_145635-76f295ef.pth) \| [log](https://download.openmmlab.com/mmtracking/mot/qdtrack/mot_dataset/qdtrack_faster-rcnn_r50_fpn_4e_mot17_20220315_145635.log.json) |
+
+## Get started
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Prepare
+
+Tracking Dataset Prepare can refer to this [document](../../docs/en/user_guides/tracking_dataset_prepare.md).
+
+### 3. Training
+
+Due to the influence of parameters such as learning rate in default configuration file, we recommend using 8 GPUs for training in order to reproduce accuracy. You can use the following command to start the training.
+
+```shell
+# Training QDTrack on mot17-half-train dataset with following command.
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_train.sh configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py 8
+```
+
+If you want to know about more detailed usage of `train.py/dist_train.sh/slurm_train.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 4. Testing and evaluation
+
+**4.1 Example on MOTxx-halfval dataset**
+
+```shell
+# Example 1: Test on motXX-half-val set
+# The number after config file represents the number of GPUs used. Here we use 8 GPUs.
+bash tools/dist_test_tracking.sh configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py 8 --checkpoint ${CHECKPOINT_PATH}
+```
+
+**4.2 use video_baesd to evaluating and testing**
+we also provide two_ways(img_based or video_based) to evaluating and testing.
+if you want to use video_based to evaluating and testing, you can modify config as follows
+
+```
+val_dataloader = dict(
+ sampler=dict(type='DefaultSampler', shuffle=False, round_up=False))
+```
+
+If you want to know about more detailed usage of `test_tracking.py/dist_test_tracking.sh/slurm_test_tracking.sh`,
+please refer to this [document](../../docs/en/user_guides/tracking_train_test.md).
+
+### 5.Inference
+
+Use a single GPU to predict a video and save it as a video.
+
+```shell
+python demo/mot_demo.py demo/demo_mot.mp4 configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py --checkpoint ${CHECKPOINT_PATH} --out mot.mp4
+```
+
+If you want to know about more detailed usage of `mot_demo.py`, please refer to this [document](../../docs/en/user_guides/tracking_inference.md).
+
+## Citation
+
+
+
+```latex
+@inproceedings{pang2021quasi,
+ title={Quasi-dense similarity learning for multiple object tracking},
+ author={Pang, Jiangmiao and Qiu, Linlu and Li, Xia and Chen, Haofeng and Li, Qi and Darrell, Trevor and Yu, Fisher},
+ booktitle={Proceedings of the IEEE/CVF conference on computer vision and pattern recognition},
+ pages={164--173},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/qdtrack/metafile.yml b/grounding-dino/mmdetection/configs/qdtrack/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..e5c5504d1bd00e43bdba7f28efcbf9dd23555342
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/qdtrack/metafile.yml
@@ -0,0 +1,30 @@
+Collections:
+ - Name: QDTrack
+ Metadata:
+ Training Data: MOT17, crowdhuman
+ Training Techniques:
+ - SGD
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/pdf/2006.06664.pdf
+ Title: Quasi-Dense Similarity Learning for Multiple Object Tracking
+ README: configs/qdtrack/README.md
+
+Models:
+ - Name: qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval
+ In Collection: QDTrack
+ Config: configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
+ Metadata:
+ Training Data: MOT17
+ Training Memory (GB): 5.83
+ Epochs: 4
+ Results:
+ - Task: Multi-object Tracking
+ Dataset: MOT17
+ Metrics:
+ HOTA: 57.1
+ MOTA: 68.1
+ IDF1: 68.6
+ Weights: https://download.openmmlab.com/mmtracking/mot/qdtrack/mot_dataset/qdtrack_faster-rcnn_r50_fpn_4e_mot17_20220315_145635-76f295ef.pth
diff --git a/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_4e_base.py b/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_4e_base.py
new file mode 100644
index 0000000000000000000000000000000000000000..e3c17c3eb97eedef88949c841364b858a3a1d6e9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_4e_base.py
@@ -0,0 +1,118 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/default_runtime.py'
+]
+
+detector = _base_.model
+detector.pop('data_preprocessor')
+
+detector['backbone'].update(
+ dict(
+ norm_cfg=dict(type='BN', requires_grad=False),
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
+detector.rpn_head.loss_bbox.update(
+ dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0))
+detector.rpn_head.bbox_coder.update(dict(clip_border=False))
+detector.roi_head.bbox_head.update(dict(num_classes=1))
+detector.roi_head.bbox_head.bbox_coder.update(dict(clip_border=False))
+detector['init_cfg'] = dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/'
+ 'faster_rcnn_r50_fpn_1x_coco-person/'
+ 'faster_rcnn_r50_fpn_1x_coco-person_20201216_175929-d022e227.pth'
+ # noqa: E501
+)
+del _base_.model
+
+model = dict(
+ type='QDTrack',
+ data_preprocessor=dict(
+ type='TrackDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ detector=detector,
+ track_head=dict(
+ type='QuasiDenseTrackHead',
+ roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ embed_head=dict(
+ type='QuasiDenseEmbedHead',
+ num_convs=4,
+ num_fcs=1,
+ embed_channels=256,
+ norm_cfg=dict(type='GN', num_groups=32),
+ loss_track=dict(type='MultiPosCrossEntropyLoss', loss_weight=0.25),
+ loss_track_aux=dict(
+ type='MarginL2Loss',
+ neg_pos_ub=3,
+ pos_margin=0,
+ neg_margin=0.1,
+ hard_mining=True,
+ loss_weight=1.0)),
+ loss_bbox=dict(type='L1Loss', loss_weight=1.0),
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.7,
+ neg_iou_thr=0.5,
+ min_pos_iou=0.5,
+ match_low_quality=False,
+ ignore_iof_thr=-1),
+ sampler=dict(
+ type='CombinedSampler',
+ num=256,
+ pos_fraction=0.5,
+ neg_pos_ub=3,
+ add_gt_as_proposals=True,
+ pos_sampler=dict(type='InstanceBalancedPosSampler'),
+ neg_sampler=dict(type='RandomSampler')))),
+ tracker=dict(
+ type='QuasiDenseTracker',
+ init_score_thr=0.9,
+ obj_score_thr=0.5,
+ match_score_thr=0.5,
+ memo_tracklet_frames=30,
+ memo_backdrop_frames=1,
+ memo_momentum=0.8,
+ nms_conf_thr=0.5,
+ nms_backdrop_iou_thr=0.3,
+ nms_class_iou_thr=0.7,
+ with_cats=True,
+ match_metric='bisoftmax'))
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001),
+ clip_grad=dict(max_norm=35, norm_type=2))
+# learning policy
+param_scheduler = [
+ dict(type='MultiStepLR', begin=0, end=4, by_epoch=True, milestones=[3])
+]
+
+# runtime settings
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=4, val_interval=4)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+default_hooks = dict(
+ logger=dict(type='LoggerHook', interval=50),
+ visualization=dict(type='TrackVisualizationHook', draw=False))
+
+vis_backends = [dict(type='LocalVisBackend')]
+visualizer = dict(
+ type='TrackLocalVisualizer', vis_backends=vis_backends, name='visualizer')
+
+# custom hooks
+custom_hooks = [
+ # Synchronize model buffers such as running_mean and running_var in BN
+ # at the end of each epoch
+ dict(type='SyncBuffersHook')
+]
diff --git a/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py b/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
new file mode 100644
index 0000000000000000000000000000000000000000..d87604dad6bf39028a8111708307482186118b19
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/qdtrack/qdtrack_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
@@ -0,0 +1,14 @@
+_base_ = [
+ './qdtrack_faster-rcnn_r50_fpn_4e_base.py',
+ '../_base_/datasets/mot_challenge.py',
+]
+
+# evaluator
+val_evaluator = [
+ dict(type='CocoVideoMetric', metric=['bbox'], classwise=True),
+ dict(type='MOTChallengeMetric', metric=['HOTA', 'CLEAR', 'Identity'])
+]
+
+test_evaluator = val_evaluator
+# The fluctuation of HOTA is about +-1.
+randomness = dict(seed=6)
diff --git a/grounding-dino/mmdetection/configs/queryinst/README.md b/grounding-dino/mmdetection/configs/queryinst/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..ee62ccbf8a3b77a6ddbb62c8ba3740bc509d8ae8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/README.md
@@ -0,0 +1,36 @@
+# QueryInst
+
+> [Instances as Queries](https://openaccess.thecvf.com/content/ICCV2021/html/Fang_Instances_As_Queries_ICCV_2021_paper.html)
+
+
+
+## Abstract
+
+We present QueryInst, a new perspective for instance segmentation. QueryInst is a multi-stage end-to-end system that treats instances of interest as learnable queries, enabling query based object detectors, e.g., Sparse R-CNN, to have strong instance segmentation performance. The attributes of instances such as categories, bounding boxes, instance masks, and instance association embeddings are represented by queries in a unified manner. In QueryInst, a query is shared by both detection and segmentation via dynamic convolutions and driven by parallelly-supervised multi-stage learning. We conduct extensive experiments on three challenging benchmarks, i.e., COCO, CityScapes, and YouTube-VIS to evaluate the effectiveness of QueryInst in object detection, instance segmentation, and video instance segmentation tasks. For the first time, we demonstrate that a simple end-to-end query based framework can achieve the state-of-the-art performance in various instance-level recognition tasks.
+
+
+
+
+ +
+
+
+## Results and Models
+
+| Model | Backbone | Style | Lr schd | Number of Proposals | Multi-Scale | RandomCrop | box AP | mask AP | Config | Download |
+| :-------: | :-------: | :-----: | :-----: | :-----------------: | :---------: | :--------: | :----: | :-----: | :---------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| QueryInst | R-50-FPN | pytorch | 1x | 100 | False | False | 42.0 | 37.5 | [config](./queryinst_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_1x_coco/queryinst_r50_fpn_1x_coco_20210907_084916-5a8f1998.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_1x_coco/queryinst_r50_fpn_1x_coco_20210907_084916.log.json) |
+| QueryInst | R-50-FPN | pytorch | 3x | 100 | True | False | 44.8 | 39.8 | [config](./queryinst_r50_fpn_ms-480-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_mstrain_480-800_3x_coco/queryinst_r50_fpn_mstrain_480-800_3x_coco_20210901_103643-7837af86.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_mstrain_480-800_3x_coco/queryinst_r50_fpn_mstrain_480-800_3x_coco_20210901_103643.log.json) |
+| QueryInst | R-50-FPN | pytorch | 3x | 300 | True | True | 47.5 | 41.7 | [config](./queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_101802-85cffbd8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_101802.log.json) |
+| QueryInst | R-101-FPN | pytorch | 3x | 100 | True | False | 46.4 | 41.0 | [config](./queryinst_r101_fpn_ms-480-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_mstrain_480-800_3x_coco/queryinst_r101_fpn_mstrain_480-800_3x_coco_20210904_104048-91f9995b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_mstrain_480-800_3x_coco/queryinst_r101_fpn_mstrain_480-800_3x_coco_20210904_104048.log.json) |
+| QueryInst | R-101-FPN | pytorch | 3x | 300 | True | True | 49.0 | 42.9 | [config](./queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_153621-76cce59f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_153621.log.json) |
+
+## Citation
+
+```latex
+@InProceedings{Fang_2021_ICCV,
+ author = {Fang, Yuxin and Yang, Shusheng and Wang, Xinggang and Li, Yu and Fang, Chen and Shan, Ying and Feng, Bin and Liu, Wenyu},
+ title = {Instances As Queries},
+ booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
+ month = {October},
+ year = {2021},
+ pages = {6910-6919}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/queryinst/metafile.yml b/grounding-dino/mmdetection/configs/queryinst/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..3ea3b00a945c8856b8c63f68a0ec6a48c70a933f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/metafile.yml
@@ -0,0 +1,100 @@
+Collections:
+ - Name: QueryInst
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - AdamW
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ - QueryInst
+ Paper:
+ URL: https://openaccess.thecvf.com/content/ICCV2021/papers/Fang_Instances_As_Queries_ICCV_2021_paper.pdf
+ Title: 'Instances as Queries'
+ README: configs/queryinst/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/main/mmdet/models/detectors/queryinst.py
+ Version: v2.18.0
+
+Models:
+ - Name: queryinst_r50_fpn_1x_coco
+ In Collection: QueryInst
+ Config: configs/queryinst/queryinst_r50_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_1x_coco/queryinst_r50_fpn_1x_coco_20210907_084916-5a8f1998.pth
+
+ - Name: queryinst_r50_fpn_ms-480-800-3x_coco
+ In Collection: QueryInst
+ Config: configs/queryinst/queryinst_r50_fpn_ms-480-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_mstrain_480-800_3x_coco/queryinst_r50_fpn_mstrain_480-800_3x_coco_20210901_103643-7837af86.pth
+
+ - Name: queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco
+ In Collection: QueryInst
+ Config: configs/queryinst/queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r50_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_101802-85cffbd8.pth
+
+ - Name: queryinst_r101_fpn_ms-480-800-3x_coco
+ In Collection: QueryInst
+ Config: configs/queryinst/queryinst_r101_fpn_ms-480-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_mstrain_480-800_3x_coco/queryinst_r101_fpn_mstrain_480-800_3x_coco_20210904_104048-91f9995b.pth
+
+ - Name: queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco
+ In Collection: QueryInst
+ Config: configs/queryinst/queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/queryinst/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco/queryinst_r101_fpn_300_proposals_crop_mstrain_480-800_3x_coco_20210904_153621-76cce59f.pth
diff --git a/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco.py b/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1692c134698a98da33612487a9fb703117fdb8b6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_300-proposals_crop-ms-480-800-3x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_ms-480-800-3x_coco.py b/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_ms-480-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dd5b7f452e583eb362e0bb05f272a771d68b6e48
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/queryinst_r101_fpn_ms-480-800-3x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './queryinst_r50_fpn_ms-480-800-3x_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..63d61d78872b452bdd8d2607fc03181b169ea845
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_1x_coco.py
@@ -0,0 +1,155 @@
+_base_ = [
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+num_stages = 6
+num_proposals = 100
+model = dict(
+ type='QueryInst',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=0,
+ add_extra_convs='on_input',
+ num_outs=4),
+ rpn_head=dict(
+ type='EmbeddingRPNHead',
+ num_proposals=num_proposals,
+ proposal_feature_channel=256),
+ roi_head=dict(
+ type='SparseRoIHead',
+ num_stages=num_stages,
+ stage_loss_weights=[1] * num_stages,
+ proposal_feature_channel=256,
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=2),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='DIIHead',
+ num_classes=80,
+ num_ffn_fcs=2,
+ num_heads=8,
+ num_cls_fcs=1,
+ num_reg_fcs=3,
+ feedforward_channels=2048,
+ in_channels=256,
+ dropout=0.0,
+ ffn_act_cfg=dict(type='ReLU', inplace=True),
+ dynamic_conv_cfg=dict(
+ type='DynamicConv',
+ in_channels=256,
+ feat_channels=64,
+ out_channels=256,
+ input_feat_shape=7,
+ act_cfg=dict(type='ReLU', inplace=True),
+ norm_cfg=dict(type='LN')),
+ loss_bbox=dict(type='L1Loss', loss_weight=5.0),
+ loss_iou=dict(type='GIoULoss', loss_weight=2.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=2.0),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ clip_border=False,
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.5, 0.5, 1., 1.])) for _ in range(num_stages)
+ ],
+ mask_head=[
+ dict(
+ type='DynamicMaskHead',
+ dynamic_conv_cfg=dict(
+ type='DynamicConv',
+ in_channels=256,
+ feat_channels=64,
+ out_channels=256,
+ input_feat_shape=14,
+ with_proj=False,
+ act_cfg=dict(type='ReLU', inplace=True),
+ norm_cfg=dict(type='LN')),
+ num_convs=4,
+ num_classes=80,
+ roi_feat_size=14,
+ in_channels=256,
+ conv_kernel_size=3,
+ conv_out_channels=256,
+ class_agnostic=False,
+ norm_cfg=dict(type='BN'),
+ upsample_cfg=dict(type='deconv', scale_factor=2),
+ loss_mask=dict(
+ type='DiceLoss',
+ loss_weight=8.0,
+ use_sigmoid=True,
+ activate=False,
+ eps=1e-5)) for _ in range(num_stages)
+ ]),
+ # training and testing settings
+ train_cfg=dict(
+ rpn=None,
+ rcnn=[
+ dict(
+ assigner=dict(
+ type='HungarianAssigner',
+ match_costs=[
+ dict(type='FocalLossCost', weight=2.0),
+ dict(type='BBoxL1Cost', weight=5.0, box_format='xyxy'),
+ dict(type='IoUCost', iou_mode='giou', weight=2.0)
+ ]),
+ sampler=dict(type='PseudoSampler'),
+ pos_weight=1,
+ mask_size=28,
+ ) for _ in range(num_stages)
+ ]),
+ test_cfg=dict(
+ rpn=None, rcnn=dict(max_per_img=num_proposals, mask_thr_binary=0.5)))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ _delete_=True, type='AdamW', lr=0.0001, weight_decay=0.0001),
+ paramwise_cfg=dict(
+ custom_keys={'backbone': dict(lr_mult=0.1, decay_mult=1.0)}),
+ clip_grad=dict(max_norm=0.1, norm_type=2))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0,
+ end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..33ab061267bc9753f490acc57ed8d4193f1250b4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_300-proposals_crop-ms-480-800-3x_coco.py
@@ -0,0 +1,45 @@
+_base_ = './queryinst_r50_fpn_ms-480-800-3x_coco.py'
+num_proposals = 300
+model = dict(
+ rpn_head=dict(num_proposals=num_proposals),
+ test_cfg=dict(
+ _delete_=True,
+ rpn=None,
+ rcnn=dict(max_per_img=num_proposals, mask_thr_binary=0.5)))
+
+# augmentation strategy originates from DETR.
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='RandomChoice',
+ transforms=[[
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ],
+ [
+ dict(
+ type='RandomChoiceResize',
+ scales=[(400, 1333), (500, 1333), (600, 1333)],
+ keep_ratio=True),
+ dict(
+ type='RandomCrop',
+ crop_type='absolute_range',
+ crop_size=(384, 600),
+ allow_negative_crop=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333),
+ (576, 1333), (608, 1333), (640, 1333),
+ (672, 1333), (704, 1333), (736, 1333),
+ (768, 1333), (800, 1333)],
+ keep_ratio=True)
+ ]]),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_ms-480-800-3x_coco.py b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_ms-480-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6b99374ef4364dc76a60c2dd74377f92c15780ed
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/queryinst/queryinst_r50_fpn_ms-480-800-3x_coco.py
@@ -0,0 +1,32 @@
+_base_ = './queryinst_r50_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(480, 1333), (512, 1333), (544, 1333), (576, 1333),
+ (608, 1333), (640, 1333), (672, 1333), (704, 1333),
+ (736, 1333), (768, 1333), (800, 1333)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# learning policy
+max_epochs = 36
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=max_epochs)
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[27, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/regnet/README.md b/grounding-dino/mmdetection/configs/regnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..0bfcec1891ccb468bcccf975b9bd26bca53e0a7f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/README.md
@@ -0,0 +1,121 @@
+# RegNet
+
+> [Designing Network Design Spaces](https://arxiv.org/abs/2003.13678)
+
+
+
+## Abstract
+
+In this work, we present a new network design paradigm. Our goal is to help advance the understanding of network design and discover design principles that generalize across settings. Instead of focusing on designing individual network instances, we design network design spaces that parametrize populations of networks. The overall process is analogous to classic manual design of networks, but elevated to the design space level. Using our methodology we explore the structure aspect of network design and arrive at a low-dimensional design space consisting of simple, regular networks that we call RegNet. The core insight of the RegNet parametrization is surprisingly simple: widths and depths of good networks can be explained by a quantized linear function. We analyze the RegNet design space and arrive at interesting findings that do not match the current practice of network design. The RegNet design space provides simple and fast networks that work well across a wide range of flop regimes. Under comparable training settings and flops, the RegNet models outperform the popular EfficientNet models while being up to 5x faster on GPUs.
+
+
+
+ +
+
+
+## Introduction
+
+We implement RegNetX and RegNetY models in detection systems and provide their first results on Mask R-CNN, Faster R-CNN and RetinaNet.
+
+The pre-trained models are converted from [model zoo of pycls](https://github.com/facebookresearch/pycls/blob/master/MODEL_ZOO.md).
+
+## Usage
+
+To use a regnet model, there are two steps to do:
+
+1. Convert the model to ResNet-style supported by MMDetection
+2. Modify backbone and neck in config accordingly
+
+### Convert model
+
+We already prepare models of FLOPs from 400M to 12G in our model zoo.
+
+For more general usage, we also provide script `regnet2mmdet.py` in the tools directory to convert the key of models pretrained by [pycls](https://github.com/facebookresearch/pycls/) to
+ResNet-style checkpoints used in MMDetection.
+
+```bash
+python -u tools/model_converters/regnet2mmdet.py ${PRETRAIN_PATH} ${STORE_PATH}
+```
+
+This script convert model from `PRETRAIN_PATH` and store the converted model in `STORE_PATH`.
+
+### Modify config
+
+The users can modify the config's `depth` of backbone and corresponding keys in `arch` according to the configs in the [pycls model zoo](https://github.com/facebookresearch/pycls/blob/master/MODEL_ZOO.md).
+The parameter `in_channels` in FPN can be found in the Figure 15 & 16 of the paper (`wi` in the legend).
+This directory already provides some configs with their performance, using RegNetX from 800MF to 12GF level.
+For other pre-trained models or self-implemented regnet models, the users are responsible to check these parameters by themselves.
+
+**Note**: Although Fig. 15 & 16 also provide `w0`, `wa`, `wm`, `group_w`, and `bot_mul` for `arch`, they are quantized thus inaccurate, using them sometimes produces different backbone that does not match the key in the pre-trained model.
+
+## Results and Models
+
+### Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------------------------------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-FPN](../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py) | pytorch | 1x | 4.4 | 12.0 | 38.2 | 34.7 | [config](../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_fpn_1x_coco/mask_rcnn_r50_fpn_1x_coco_20200205_050542.log.json) |
+| [RegNetX-3.2GF-FPN](./mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py) | pytorch | 1x | 5.0 | | 40.3 | 36.6 | [config](./mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_1x_coco_20200520_163141-2a9d1814.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_1x_coco_20200520_163141.log.json) |
+| [RegNetX-4.0GF-FPN](./mask-rcnn_regnetx-4GF_fpn_1x_coco.py) | pytorch | 1x | 5.5 | | 41.5 | 37.4 | [config](./mask-rcnn_regnetx-4GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_1x_coco/mask_rcnn_regnetx-4GF_fpn_1x_coco_20200517_180217-32e9c92d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_1x_coco/mask_rcnn_regnetx-4GF_fpn_1x_coco_20200517_180217.log.json) |
+| [R-101-FPN](../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py) | pytorch | 1x | 6.4 | 10.3 | 40.0 | 36.1 | [config](../mask_rcnn/mask-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204-1efe0ed5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r101_fpn_1x_coco/mask_rcnn_r101_fpn_1x_coco_20200204_144809.log.json) |
+| [RegNetX-6.4GF-FPN](./mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py) | pytorch | 1x | 6.1 | | 41.0 | 37.1 | [config](./mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-6.4GF_fpn_1x_coco/mask_rcnn_regnetx-6.4GF_fpn_1x_coco_20200517_180439-3a7aae83.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-6.4GF_fpn_1x_coco/mask_rcnn_regnetx-6.4GF_fpn_1x_coco_20200517_180439.log.json) |
+| [X-101-32x4d-FPN](../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py) | pytorch | 1x | 7.6 | 9.4 | 41.9 | 37.5 | [config](../mask_rcnn/mask-rcnn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_1x_coco/mask_rcnn_x101_32x4d_fpn_1x_coco_20200205-478d0b67.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_x101_32x4d_fpn_1x_coco/mask_rcnn_x101_32x4d_fpn_1x_coco_20200205_034906.log.json) |
+| [RegNetX-8.0GF-FPN](./mask-rcnn_regnetx-8GF_fpn_1x_coco.py) | pytorch | 1x | 6.4 | | 41.7 | 37.5 | [config](./mask-rcnn_regnetx-8GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-8GF_fpn_1x_coco/mask_rcnn_regnetx-8GF_fpn_1x_coco_20200517_180515-09daa87e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-8GF_fpn_1x_coco/mask_rcnn_regnetx-8GF_fpn_1x_coco_20200517_180515.log.json) |
+| [RegNetX-12GF-FPN](./mask-rcnn_regnetx-12GF_fpn_1x_coco.py) | pytorch | 1x | 7.4 | | 42.2 | 38 | [config](./mask-rcnn_regnetx-12GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-12GF_fpn_1x_coco/mask_rcnn_regnetx-12GF_fpn_1x_coco_20200517_180552-b538bd8b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-12GF_fpn_1x_coco/mask_rcnn_regnetx-12GF_fpn_1x_coco_20200517_180552.log.json) |
+| [RegNetX-3.2GF-FPN-DCN-C3-C5](./mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py) | pytorch | 1x | 5.0 | | 40.3 | 36.6 | [config](./mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco_20200520_172726-75f40794.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco_20200520_172726.log.json) |
+
+### Faster R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-FPN](../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py) | pytorch | 1x | 4.0 | 18.2 | 37.4 | [config](../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130_204655.log.json) |
+| [RegNetX-3.2GF-FPN](./faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py) | pytorch | 1x | 4.5 | | 39.9 | [config](./faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_1x_coco/faster_rcnn_regnetx-3.2GF_fpn_1x_coco_20200517_175927-126fd9bf.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_1x_coco/faster_rcnn_regnetx-3.2GF_fpn_1x_coco_20200517_175927.log.json) |
+| [RegNetX-3.2GF-FPN](./faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py) | pytorch | 2x | 4.5 | | 41.1 | [config](./faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_2x_coco/faster_rcnn_regnetx-3.2GF_fpn_2x_coco_20200520_223955-e2081918.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_2x_coco/faster_rcnn_regnetx-3.2GF_fpn_2x_coco_20200520_223955.log.json) |
+
+### RetinaNet
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-----------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :-------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| [R-50-FPN](../retinanet/retinanet_r50_fpn_1x_coco.py) | pytorch | 1x | 3.8 | 16.6 | 36.5 | [config](../retinanet/retinanet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_1x_coco/retinanet_r50_fpn_1x_coco_20200130-c2398f9e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_1x_coco/retinanet_r50_fpn_1x_coco_20200130_002941.log.json) |
+| [RegNetX-800MF-FPN](./retinanet_regnetx-800MF_fpn_1x_coco.py) | pytorch | 1x | 2.5 | | 35.6 | [config](./retinanet_regnetx-800MF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-800MF_fpn_1x_coco/retinanet_regnetx-800MF_fpn_1x_coco_20200517_191403-f6f91d10.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-800MF_fpn_1x_coco/retinanet_regnetx-800MF_fpn_1x_coco_20200517_191403.log.json) |
+| [RegNetX-1.6GF-FPN](./retinanet_regnetx-1.6GF_fpn_1x_coco.py) | pytorch | 1x | 3.3 | | 37.3 | [config](./retinanet_regnetx-1.6GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco/retinanet_regnetx-1.6GF_fpn_1x_coco_20200517_191403-37009a9d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco/retinanet_regnetx-1.6GF_fpn_1x_coco_20200517_191403.log.json) |
+| [RegNetX-3.2GF-FPN](./retinanet_regnetx-3.2GF_fpn_1x_coco.py) | pytorch | 1x | 4.2 | | 39.1 | [config](./retinanet_regnetx-3.2GF_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco/retinanet_regnetx-3.2GF_fpn_1x_coco_20200520_163141-cb1509e8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco/retinanet_regnetx-3.2GF_fpn_1x_coco_20200520_163141.log.json) |
+
+### Pre-trained models
+
+We also train some models with longer schedules and multi-scale training. The users could finetune them for downstream tasks.
+
+| Method | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :---------------: | :----------------------------------------------------------------------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster RCNN | [RegNetX-400MF-FPN](./faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py) | pytorch | 3x | 2.3 | | 37.1 | - | [config](./faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210526_095112-e1967c37.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210526_095112.log.json) |
+| Faster RCNN | [RegNetX-800MF-FPN](./faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py) | pytorch | 3x | 2.8 | | 38.8 | - | [config](./faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210526_095118-a2c70b20.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210526_095118.log.json) |
+| Faster RCNN | [RegNetX-1.6GF-FPN](./faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py) | pytorch | 3x | 3.4 | | 40.5 | - | [config](./faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-1_20210526_095325-94aa46cc.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-1_20210526_095325.log.json) |
+| Faster RCNN | [RegNetX-3.2GF-FPN](./faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | pytorch | 3x | 4.4 | | 42.3 | - | [config](./faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-3_20210526_095152-e16a5227.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-3_20210526_095152.log.json) |
+| Faster RCNN | [RegNetX-4GF-FPN](./faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py) | pytorch | 3x | 4.9 | | 42.8 | - | [config](./faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210526_095201-65eaf841.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210526_095201.log.json) |
+| Mask RCNN | [RegNetX-400MF-FPN](./mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 2.5 | | 37.6 | 34.4 | [config](./mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco_20210601_235443-8aac57a4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco_20210601_235443.log.json) |
+| Mask RCNN | [RegNetX-800MF-FPN](./mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 2.9 | | 39.5 | 36.1 | [config](./mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco_20210602_210641-715d51f5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco_20210602_210641.log.json) |
+| Mask RCNN | [RegNetX-1.6GF-FPN](./mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 3.6 | | 40.9 | 37.5 | [config](./mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-1.6GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-1_20210602_210641-6764cff5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-1.6GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-1_20210602_210641.log.json) |
+| Mask RCNN | [RegNetX-3.2GF-FPN](./mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | pytorch | 3x | 5.0 | | 43.1 | 38.7 | [config](./mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco_20200521_202221-99879813.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco_20200521_202221.log.json) |
+| Mask RCNN | [RegNetX-4GF-FPN](./mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py) | pytorch | 3x | 5.1 | | 43.4 | 39.2 | [config](./mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco_20210602_032621-00f0331c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco_20210602_032621.log.json) |
+| Cascade Mask RCNN | [RegNetX-400MF-FPN](./cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py) | pytorch | 3x | 4.3 | | 41.6 | 36.4 | [config](./cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210715_211619-5142f449.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210715_211619.log.json) |
+| Cascade Mask RCNN | [RegNetX-800MF-FPN](./cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py) | pytorch | 3x | 4.8 | | 42.8 | 37.6 | [config](./cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210715_211616-dcbd13f4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210715_211616.log.json) |
+| Cascade Mask RCNN | [RegNetX-1.6GF-FPN](./cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py) | pytorch | 3x | 5.4 | | 44.5 | 39.0 | [config](./cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-1_20210715_211616-75f29a61.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-1_20210715_211616.log.json) |
+| Cascade Mask RCNN | [RegNetX-3.2GF-FPN](./cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | pytorch | 3x | 6.4 | | 45.8 | 40.0 | [config](./cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-3_20210715_211616-b9c2c58b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-3_20210715_211616.log.json) |
+| Cascade Mask RCNN | [RegNetX-4GF-FPN](./cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py) | pytorch | 3x | 6.9 | | 45.8 | 40.0 | [config](./cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210715_212034-cbb1be4c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210715_212034.log.json) |
+
+### Notice
+
+1. The models are trained using a different weight decay, i.e., `weight_decay=5e-5` according to the setting in ImageNet training. This brings improvement of at least 0.7 AP absolute but does not improve the model using ResNet-50.
+2. RetinaNets using RegNets are trained with learning rate 0.02 with gradient clip. We find that using learning rate 0.02 could improve the results by at least 0.7 AP absolute and gradient clip is necessary to stabilize the training. However, this does not improve the performance of ResNet-50-FPN RetinaNet.
+
+## Citation
+
+```latex
+@article{radosavovic2020designing,
+ title={Designing Network Design Spaces},
+ author={Ilija Radosavovic and Raj Prateek Kosaraju and Ross Girshick and Kaiming He and Piotr Dollár},
+ year={2020},
+ eprint={2003.13678},
+ archivePrefix={arXiv},
+ primaryClass={cs.CV}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..74e6adaba5c262d45aaec876d1225b0061bb290b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_1.6gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_1.6gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[72, 168, 408, 912],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ea219021260b6aa3a844eb6b4780e9669e50ed3b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
@@ -0,0 +1,28 @@
+_base_ = [
+ '../common/ms_3x_coco-instance.py',
+ '../_base_/models/cascade-mask-rcnn_r50_fpn.py'
+]
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(optimizer=dict(weight_decay=0.00005))
diff --git a/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3fe47f837437163710ecd28f1bb217c643464965
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_400mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_400mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[32, 64, 160, 384],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e22886a80f92ba4269477a307b2689c45468381c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_4.0gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_4.0gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[80, 240, 560, 1360],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..655bdc60c772875e0a1ed871bd6bf02aab8e39cc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_800mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_800mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 288, 672],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e9e8302bdd1537b825f36777e3211d27dec8fb0c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_1.6gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_1.6gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[72, 168, 408, 912],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..db49092e2fb7e1cf3dbcad2bb99aa08396ea35e7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..be533603085a89b65556b47f5e333fdde734bbd1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d3d5d5d689162d805c0cfb4d84f9a128faf90c25
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
@@ -0,0 +1,25 @@
+_base_ = ['../common/ms_3x_coco.py', '../_base_/models/faster-rcnn_r50_fpn.py']
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(optimizer=dict(weight_decay=0.00005))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2edeff9c1f5a794ed14dc8723917986ac26e3d36
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_400mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_400mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[32, 64, 160, 384],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..afcbb5d5d1a8aee47267d1f82fff8d40fa0d8e9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_4.0gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_4.0gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[80, 240, 560, 1360],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f659ec9689068afd94aa3bc545d4fed91ffb5eb4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = 'faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_800mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_800mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 288, 672],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..60874c66dbc37df824a9c44bb8c28a441f7f84e4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,26 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_1.6gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_1.6gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[72, 168, 408, 912],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-12GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-12GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e82cecea010fb32143f809add198a052285a6897
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-12GF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_12gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_12gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[224, 448, 896, 2240],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c7c1d1ac3a7bd87bd210b4cd2194dd7e430f8d96
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = 'mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c52bf13ff6df5cda353c21ac32a950602620dbde
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py
@@ -0,0 +1,30 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..36482c939dc3e600171b98bc159440e5fb740ffa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
@@ -0,0 +1,60 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning policy
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b96e1921f0dae8ad6656a7785d9d4655f9f349b3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,26 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_400mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_400mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[32, 64, 160, 384],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ce9f8ef4ffbcce66ec0184b3ff06a92425231597
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_4.0gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_4.0gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[80, 240, 560, 1360],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f160ccf66700d98a6403ed736928e529368e800c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,26 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_4.0gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_4.0gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[80, 240, 560, 1360],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e17a3d7695fa7ba9e135d7a436118aae29be4747
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_6.4gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_6.4gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[168, 392, 784, 1624],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..93851fdbb99e5d8e3a58062c7ad83d2acad14ac6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py
@@ -0,0 +1,26 @@
+_base_ = [
+ '../common/ms-poly_3x_coco-instance.py',
+ '../_base_/models/mask-rcnn_r50_fpn.py'
+]
+
+model = dict(
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_800mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_800mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 288, 672],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-8GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-8GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..62a4c931512e6b46093b03fd4e80741a93151c6a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/mask-rcnn_regnetx-8GF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_8.0gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_8.0gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[80, 240, 720, 1920],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/metafile.yml b/grounding-dino/mmdetection/configs/regnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..19fbba80f0396e1dad7a330ef769d98ad1a0c4d2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/metafile.yml
@@ -0,0 +1,797 @@
+Models:
+ - Name: mask-rcnn_regnetx-3.2GF_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_1x_coco_20200520_163141-2a9d1814.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-4GF_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-4GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_1x_coco/mask_rcnn_regnetx-4GF_fpn_1x_coco_20200517_180217-32e9c92d.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-6.4GF_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-6.4GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.1
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.0
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-6.4GF_fpn_1x_coco/mask_rcnn_regnetx-6.4GF_fpn_1x_coco_20200517_180439-3a7aae83.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-8GF_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-8GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-8GF_fpn_1x_coco/mask_rcnn_regnetx-8GF_fpn_1x_coco_20200517_180515-09daa87e.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-12GF_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-12GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.4
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-12GF_fpn_1x_coco/mask_rcnn_regnetx-12GF_fpn_1x_coco_20200517_180552-b538bd8b.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-3.2GF-mdconv-c3-c5_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco/mask_rcnn_regnetx-3.2GF_fpn_mdconv_c3-c5_1x_coco_20200520_172726-75f40794.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-3.2GF_fpn_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_1x_coco/faster_rcnn_regnetx-3.2GF_fpn_1x_coco_20200517_175927-126fd9bf.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-3.2GF_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 4.5
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_2x_coco/faster_rcnn_regnetx-3.2GF_fpn_2x_coco_20200520_223955-e2081918.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: retinanet_regnetx-800MF_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/regnet/retinanet_regnetx-800MF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 2.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 35.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-800MF_fpn_1x_coco/retinanet_regnetx-800MF_fpn_1x_coco_20200517_191403-f6f91d10.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: retinanet_regnetx-1.6GF_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.3
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco/retinanet_regnetx-1.6GF_fpn_1x_coco_20200517_191403-37009a9d.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: retinanet_regnetx-3.2GF_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.2
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco/retinanet_regnetx-3.2GF_fpn_1x_coco_20200520_163141-cb1509e8.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-400MF_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 2.3
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210526_095112-e1967c37.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-800MF_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 2.8
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210526_095118-a2c70b20.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 3.4
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-1_20210526_095325-94aa46cc.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.4
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-3_20210526_095152-e16a5227.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: faster-rcnn_regnetx-4GF_fpn_ms-3x_coco
+ In Collection: Faster R-CNN
+ Config: configs/regnet/faster-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.9
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/faster_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210526_095201-65eaf841.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco_20200521_202221-99879813.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-400MF_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 2.5
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-400MF_fpn_mstrain-poly_3x_coco_20210601_235443-8aac57a4.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-800MF_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 2.9
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-800MF_fpn_mstrain-poly_3x_coco_20210602_210641-715d51f5.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-1.6GF_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 3.6
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.9
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-1.6GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-1_20210602_210641-6764cff5.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco_20200521_202221-99879813.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco
+ In Collection: Mask R-CNN
+ Config: configs/regnet/mask-rcnn_regnetx-4GF_fpn_ms-poly-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco/mask_rcnn_regnetx-4GF_fpn_mstrain-poly_3x_coco_20210602_032621-00f0331c.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/regnet/cascade-mask-rcnn_regnetx-400MF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.3
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-400MF_fpn_mstrain_3x_coco_20210715_211619-5142f449.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/regnet/cascade-mask-rcnn_regnetx-800MF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 4.8
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-800MF_fpn_mstrain_3x_coco_20210715_211616-dcbd13f4.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/regnet/cascade-mask-rcnn_regnetx-1.6GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.4
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-1.6GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-1_20210715_211616-75f29a61.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/regnet/cascade-mask-rcnn_regnetx-3.2GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 6.4
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-3.2GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-3_20210715_211616-b9c2c58b.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/regnet/cascade-mask-rcnn_regnetx-4GF_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 6.9
+ Epochs: 36
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - RegNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/regnet/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco/cascade_mask_rcnn_regnetx-4GF_fpn_mstrain_3x_coco_20210715_212034-cbb1be4c.pth
+ Paper:
+ URL: https://arxiv.org/abs/2003.13678
+ Title: 'Designing Network Design Spaces'
+ README: configs/regnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/regnet.py#L11
+ Version: v2.1.0
diff --git a/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7395c1bfbfa16670294c721f9f3135da9b9e69ae
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-1.6GF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './retinanet_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_1.6gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_1.6gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[72, 168, 408, 912],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8b8a32cec195901e2f1326bf62f4fa4508e744d2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-3.2GF_fpn_1x_coco.py
@@ -0,0 +1,31 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ data_preprocessor=dict(
+ # The mean and std are used in PyCls when training RegNets
+ mean=[103.53, 116.28, 123.675],
+ std=[57.375, 57.12, 58.395],
+ bgr_to_rgb=False),
+ backbone=dict(
+ _delete_=True,
+ type='RegNet',
+ arch='regnetx_3.2gf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_3.2gf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[96, 192, 432, 1008],
+ out_channels=256,
+ num_outs=5))
+
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.00005),
+ clip_grad=dict(max_norm=35, norm_type=2))
diff --git a/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-800MF_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-800MF_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f6f8989320d6ffbcd55148471f62a962c52f9131
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/regnet/retinanet_regnetx-800MF_fpn_1x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './retinanet_regnetx-3.2GF_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='RegNet',
+ arch='regnetx_800mf',
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://regnetx_800mf')),
+ neck=dict(
+ type='FPN',
+ in_channels=[64, 128, 288, 672],
+ out_channels=256,
+ num_outs=5))
diff --git a/grounding-dino/mmdetection/configs/reid/README.md b/grounding-dino/mmdetection/configs/reid/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a5bfe5ec49947e939a3261fa9938d77cc04df44f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reid/README.md
@@ -0,0 +1,135 @@
+# Training a ReID Model
+
+You may want to train a ReID model for multiple object tracking or other applications. We support ReID model training in MMDetection, which is built upon [MMPretrain](https://github.com/open-mmlab/mmpretrain).
+
+### 1. Development Environment Setup
+
+Tracking Development Environment Setup can refer to this [document](../../docs/en/get_started.md).
+
+### 2. Dataset Preparation
+
+This section will show how to train a ReID model on standard datasets i.e. MOT17.
+
+We need to download datasets following docs. We use [ReIDDataset](mmdet/datasets/reid_dataset.py) to maintain standard datasets. In this case, you need to convert the official dataset to this style. We provide scripts and the usages as follow:
+
+```python
+python tools/dataset_converters/mot2reid.py -i ./data/MOT17/ -o ./data/MOT17/reid --val-split 0.2 --vis-threshold 0.3
+```
+
+Arguments:
+
+- `--val-split`: Proportion of the validation dataset to the whole ReID dataset.
+- `--vis-threshold`: Threshold of visibility for each person.
+
+The directory of the converted datasets is as follows:
+
+```
+MOT17
+├── train
+├── test
+├── reid
+│ ├── imgs
+│ │ ├── MOT17-02-FRCNN_000002
+│ │ │ ├── 000000.jpg
+│ │ │ ├── 000001.jpg
+│ │ │ ├── ...
+│ │ ├── MOT17-02-FRCNN_000003
+│ │ │ ├── 000000.jpg
+│ │ │ ├── 000001.jpg
+│ │ │ ├── ...
+│ ├── meta
+│ │ ├── train_80.txt
+│ │ ├── val_20.txt
+```
+
+Note: `80` in `train_80.txt` means the proportion of the training dataset to the whole ReID dataset is eighty percent. While the proportion of the validation dataset is twenty percent.
+
+For training, we provide a annotation list `train_80.txt`. Each line of the list constraints a filename and its corresponding ground-truth labels. The format is as follows:
+
+```
+MOT17-05-FRCNN_000110/000018.jpg 0
+MOT17-13-FRCNN_000146/000014.jpg 1
+MOT17-05-FRCNN_000088/000004.jpg 2
+MOT17-02-FRCNN_000009/000081.jpg 3
+```
+
+For validation, The annotation list `val_20.txt` remains the same as format above.
+
+Note: Images in `MOT17/reid/imgs` are cropped from raw images in `MOT17/train` by the corresponding `gt.txt`. The value of ground-truth labels should fall in range `[0, num_classes - 1]`.
+
+### 3. Training
+
+#### Training on a single GPU
+
+```shell
+python tools/train.py configs/reid/reid_r50_8xb32-6e_mot17train80_test-mot17val20.py
+```
+
+#### Training on multiple GPUs
+
+We provide `tools/dist_train.sh` to launch training on multiple GPUs.
+The basic usage is as follows.
+
+```shell
+bash tools/dist_train.sh configs/reid/reid_r50_8xb32-6e_mot17train80_test-mot17val20.py 8
+```
+
+### 4. Customize Dataset
+
+This section will show how to train a ReID model on customize datasets.
+
+### 4.1 Dataset Preparation
+
+You need to convert your customize datasets to existing dataset format.
+
+#### An example of customized dataset
+
+Assume we are going to implement a `Filelist` dataset, which takes filelists for both training and testing. The directory of the dataset is as follows:
+
+```
+Filelist
+├── imgs
+│ ├── person1
+│ │ ├── 000000.jpg
+│ │ ├── 000001.jpg
+│ │ ├── ...
+│ ├── person2
+│ │ ├── 000000.jpg
+│ │ ├── 000001.jpg
+│ │ ├── ...
+├── meta
+│ ├── train.txt
+│ ├── val.txt
+```
+
+The format of annotation list is as follows:
+
+```
+person1/000000.jpg 0
+person1/000001.jpg 0
+person2/000000.jpg 1
+person2/000001.jpg 1
+```
+
+You can directly use [ReIDDataset](mmdet/datasets/reid_dataset.py). In this case, you only need to modify the config as follows:
+
+```python
+# modify the path of annotation files and the image path prefix
+data = dict(
+ train=dict(
+ data_prefix='data/Filelist/imgs',
+ ann_file='data/Filelist/meta/train.txt'),
+ val=dict(
+ data_prefix='data/Filelist/imgs',
+ ann_file='data/Filelist/meta/val.txt'),
+ test=dict(
+ data_prefix='data/Filelist/imgs',
+ ann_file='data/Filelist/meta/val.txt'),
+)
+# modify the number of classes, assume your training set has 100 classes
+model = dict(reid=dict(head=dict(num_classes=100)))
+```
+
+### 4.2 Training
+
+The training stage is the same as `Standard Dataset`.
diff --git a/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot15train80_test-mot15val20.py b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot15train80_test-mot15val20.py
new file mode 100644
index 0000000000000000000000000000000000000000..4e30b22964d0504771678dbd0a551bc16a0714ea
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot15train80_test-mot15val20.py
@@ -0,0 +1,7 @@
+_base_ = ['./reid_r50_8xb32-6e_mot17train80_test-mot17val20.py']
+model = dict(head=dict(num_classes=368))
+# data
+data_root = 'data/MOT15/'
+train_dataloader = dict(dataset=dict(data_root=data_root))
+val_dataloader = dict(dataset=dict(data_root=data_root))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot16train80_test-mot16val20.py b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot16train80_test-mot16val20.py
new file mode 100644
index 0000000000000000000000000000000000000000..468b9bfb2453f97c83282cc2f383c7592694269c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot16train80_test-mot16val20.py
@@ -0,0 +1,7 @@
+_base_ = ['./reid_r50_8xb32-6e_mot17train80_test-mot17val20.py']
+model = dict(head=dict(num_classes=371))
+# data
+data_root = 'data/MOT16/'
+train_dataloader = dict(dataset=dict(data_root=data_root))
+val_dataloader = dict(dataset=dict(data_root=data_root))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot17train80_test-mot17val20.py b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot17train80_test-mot17val20.py
new file mode 100644
index 0000000000000000000000000000000000000000..83669de7c170c5de0e2054808ef7a76878bc1f24
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot17train80_test-mot17val20.py
@@ -0,0 +1,61 @@
+_base_ = [
+ '../_base_/datasets/mot_challenge_reid.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='BaseReID',
+ data_preprocessor=dict(
+ type='ReIDDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ to_rgb=True),
+ backbone=dict(
+ type='mmpretrain.ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ style='pytorch'),
+ neck=dict(type='GlobalAveragePooling', kernel_size=(8, 4), stride=1),
+ head=dict(
+ type='LinearReIDHead',
+ num_fcs=1,
+ in_channels=2048,
+ fc_channels=1024,
+ out_channels=128,
+ num_classes=380,
+ loss_cls=dict(type='mmpretrain.CrossEntropyLoss', loss_weight=1.0),
+ loss_triplet=dict(type='TripletLoss', margin=0.3, loss_weight=1.0),
+ norm_cfg=dict(type='BN1d'),
+ act_cfg=dict(type='ReLU')),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'https://download.openmmlab.com/mmclassification/v0/resnet/resnet50_batch256_imagenet_20200708-cfb998bf.pth' # noqa: E501
+ ))
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ clip_grad=None,
+ optimizer=dict(type='SGD', lr=0.1, momentum=0.9, weight_decay=0.0001))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 1000,
+ by_epoch=False,
+ begin=0,
+ end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=6,
+ by_epoch=True,
+ milestones=[5],
+ gamma=0.1)
+]
+
+# train, val, test setting
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=6, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
diff --git a/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot20train80_test-mot20val20.py b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot20train80_test-mot20val20.py
new file mode 100644
index 0000000000000000000000000000000000000000..8a807996186c35f91e23f6e0ec95a2191479c15b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reid/reid_r50_8xb32-6e_mot20train80_test-mot20val20.py
@@ -0,0 +1,10 @@
+_base_ = ['./reid_r50_8xb32-6e_mot17train80_test-mot17val20.py']
+model = dict(head=dict(num_classes=1701))
+# data
+data_root = 'data/MOT20/'
+train_dataloader = dict(dataset=dict(data_root=data_root))
+val_dataloader = dict(dataset=dict(data_root=data_root))
+test_dataloader = val_dataloader
+
+# train, val, test setting
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=6, val_interval=7)
diff --git a/grounding-dino/mmdetection/configs/reppoints/README.md b/grounding-dino/mmdetection/configs/reppoints/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..03cb86bef4e24298075d67b5acb4a2e30bafef7e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/README.md
@@ -0,0 +1,59 @@
+# RepPoints
+
+> [RepPoints: Point Set Representation for Object Detection](https://arxiv.org/abs/1904.11490)
+
+
+
+## Abstract
+
+Modern object detectors rely heavily on rectangular bounding boxes, such as anchors, proposals and the final predictions, to represent objects at various recognition stages. The bounding box is convenient to use but provides only a coarse localization of objects and leads to a correspondingly coarse extraction of object features. In this paper, we present RepPoints(representative points), a new finer representation of objects as a set of sample points useful for both localization and recognition. Given ground truth localization and recognition targets for training, RepPoints learn to automatically arrange themselves in a manner that bounds the spatial extent of an object and indicates semantically significant local areas. They furthermore do not require the use of anchors to sample a space of bounding boxes. We show that an anchor-free object detector based on RepPoints can be as effective as the state-of-the-art anchor-based detection methods, with 46.5 AP and 67.4 AP50 on the COCO test-dev detection benchmark, using ResNet-101 model.
+
+
+
+ +
+
+
+## Introdution
+
+By [Ze Yang](https://yangze.tech/), [Shaohui Liu](http://b1ueber2y.me/), and [Han Hu](https://ancientmooner.github.io/).
+
+We provide code support and configuration files to reproduce the results in the paper for
+["RepPoints: Point Set Representation for Object Detection"](https://arxiv.org/abs/1904.11490) on COCO object detection.
+
+**RepPoints**, initially described in [arXiv](https://arxiv.org/abs/1904.11490), is a new representation method for visual objects, on which visual understanding tasks are typically centered. Visual object representation, aiming at both geometric description and appearance feature extraction, is conventionally achieved by `bounding box + RoIPool (RoIAlign)`. The bounding box representation is convenient to use; however, it provides only a rectangular localization of objects that lacks geometric precision and may consequently degrade feature quality. Our new representation, RepPoints, models objects by a `point set` instead of a `bounding box`, which learns to adaptively position themselves over an object in a manner that circumscribes the object’s `spatial extent` and enables `semantically aligned feature extraction`. This richer and more flexible representation maintains the convenience of bounding boxes while facilitating various visual understanding applications. This repo demonstrated the effectiveness of RepPoints for COCO object detection.
+
+Another feature of this repo is the demonstration of an `anchor-free detector`, which can be as effective as state-of-the-art anchor-based detection methods. The anchor-free detector can utilize either `bounding box` or `RepPoints` as the basic object representation.
+
+## Results and Models
+
+The results on COCO 2017val are shown in the table below.
+
+| Method | Backbone | GN | Anchor | convert func | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------: | :-----------: | :-: | :----: | :----------: | :-----: | :------: | :------------: | :----: | :---------------------------------------------------------------------: | :---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| BBox | R-50-FPN | Y | single | - | 1x | 3.9 | 15.9 | 36.4 | [config](./reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916-0eedf8d1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916.log.json) |
+| BBox | R-50-FPN | Y | none | - | 1x | 3.9 | 15.4 | 37.4 | [config](./reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916-0eedf8d1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916.log.json) |
+| RepPoints | R-50-FPN | N | none | moment | 1x | 3.3 | 18.5 | 37.0 | [config](./reppoints-moment_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_1x_coco/reppoints_moment_r50_fpn_1x_coco_20200330-b73db8d1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_1x_coco/reppoints_moment_r50_fpn_1x_coco_20200330_233609.log.json) |
+| RepPoints | R-50-FPN | Y | none | moment | 1x | 3.9 | 17.5 | 38.1 | [config](./reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco_20200329_145952-3e51b550.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco_20200329_145952.log.json) |
+| RepPoints | R-50-FPN | Y | none | moment | 2x | 3.9 | - | 38.6 | [config](./reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco_20200329-91babaa2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco_20200329_150020.log.json) |
+| RepPoints | R-101-FPN | Y | none | moment | 2x | 5.8 | 13.7 | 40.5 | [config](./reppoints-moment_r101_fpn-gn_head-gn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco_20200329-4fbc7310.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco_20200329_132205.log.json) |
+| RepPoints | R-101-FPN-DCN | Y | none | moment | 2x | 5.9 | 12.1 | 42.9 | [config](./reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329-3309fbf2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329_132134.log.json) |
+| RepPoints | X-101-FPN-DCN | Y | none | moment | 2x | 7.1 | 9.3 | 44.2 | [config](./reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329-f87da1ea.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329_132201.log.json) |
+
+**Notes:**
+
+- `R-xx`, `X-xx` denote the ResNet and ResNeXt architectures, respectively.
+- `DCN` denotes replacing 3x3 conv with the 3x3 deformable convolution in `c3-c5` stages of backbone.
+- `none` in the `anchor` column means 2-d `center point` (x,y) is used to represent the initial object hypothesis. `single` denotes one 4-d anchor box (x,y,w,h) with IoU based label assign criterion is adopted.
+- `moment`, `partial MinMax`, `MinMax` in the `convert func` column are three functions to convert a point set to a pseudo box.
+- Note the results here are slightly different from those reported in the paper, due to framework change. While the original paper uses an [MXNet](https://mxnet.apache.org/) implementation, we re-implement the method in [PyTorch](https://pytorch.org/) based on mmdetection.
+
+## Citation
+
+```latex
+@inproceedings{yang2019reppoints,
+ title={RepPoints: Point Set Representation for Object Detection},
+ author={Yang, Ze and Liu, Shaohui and Hu, Han and Wang, Liwei and Lin, Stephen},
+ booktitle={The IEEE International Conference on Computer Vision (ICCV)},
+ month={Oct},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/reppoints/metafile.yml b/grounding-dino/mmdetection/configs/reppoints/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..732d541fb548f6eed00d6ba0fb4ffe3854b4f9c5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/metafile.yml
@@ -0,0 +1,181 @@
+Collections:
+ - Name: RepPoints
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Group Normalization
+ - FPN
+ - RepPoints
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1904.11490
+ Title: 'RepPoints: Point Set Representation for Object Detection'
+ README: configs/reppoints/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/reppoints_detector.py#L9
+ Version: v2.0.0
+
+Models:
+ - Name: reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ inference time (ms/im):
+ - value: 62.89
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916-0eedf8d1.pth
+
+ - Name: reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ inference time (ms/im):
+ - value: 64.94
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco/bbox_r50_grid_fpn_gn-neck%2Bhead_1x_coco_20200329_145916-0eedf8d1.pth
+
+ - Name: reppoints-moment_r50_fpn_1x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.3
+ inference time (ms/im):
+ - value: 54.05
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_1x_coco/reppoints_moment_r50_fpn_1x_coco_20200330-b73db8d1.pth
+
+ - Name: reppoints-moment_r50_fpn-gn_head-gn_1x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ inference time (ms/im):
+ - value: 57.14
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_1x_coco_20200329_145952-3e51b550.pth
+
+ - Name: reppoints-moment_r50_fpn-gn_head-gn_2x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ inference time (ms/im):
+ - value: 57.14
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r50_fpn_gn-neck%2Bhead_2x_coco_20200329-91babaa2.pth
+
+ - Name: reppoints-moment_r101_fpn-gn_head-gn_2x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_r101_fpn-gn_head-gn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.8
+ inference time (ms/im):
+ - value: 72.99
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_gn-neck%2Bhead_2x_coco_20200329-4fbc7310.pth
+
+ - Name: reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.9
+ inference time (ms/im):
+ - value: 82.64
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_r101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329-3309fbf2.pth
+
+ - Name: reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco
+ In Collection: RepPoints
+ Config: configs/reppoints/reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ inference time (ms/im):
+ - value: 107.53
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/reppoints/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco/reppoints_moment_x101_fpn_dconv_c3-c5_gn-neck%2Bhead_2x_coco_20200329-f87da1ea.pth
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f116e53f6ded9468098733c1bab938831fee041d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50-center_fpn-gn_head-gn-grid_1x_coco.py
@@ -0,0 +1,2 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py'
+model = dict(bbox_head=dict(transform_method='minmax', use_grid_points=True))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..76be39b8de8f52d48c6cdd4626f23221e35164ab
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-bbox_r50_fpn-gn_head-gn-grid_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py'
+model = dict(
+ bbox_head=dict(transform_method='minmax', use_grid_points=True),
+ # training and testing settings
+ train_cfg=dict(
+ init=dict(
+ assigner=dict(
+ _delete_=True,
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0,
+ ignore_iof_thr=-1))))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-minmax_r50_fpn-gn_head-gn_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-minmax_r50_fpn-gn_head-gn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0e7dffe77a062268737205fd86ab23f22cd85479
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-minmax_r50_fpn-gn_head-gn_1x_coco.py
@@ -0,0 +1,2 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py'
+model = dict(bbox_head=dict(transform_method='minmax'))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5c2bfab40020d7508ba90029ad29b24da8a7ad78
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
@@ -0,0 +1,8 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101_fpn-gn_head-gn_2x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101_fpn-gn_head-gn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..02c447ada075ca6b076a5e7ff2ed74fb3b80c30d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r101_fpn-gn_head-gn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cedf2226b5ecd2e5dd207041523ab4a2627a1734
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py
@@ -0,0 +1,3 @@
+_base_ = './reppoints-moment_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(neck=dict(norm_cfg=norm_cfg), bbox_head=dict(norm_cfg=norm_cfg))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4490d4496af6d680fbed2eedcaf73e138afff0cc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py'
+
+max_epochs = 24
+
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..df7e72a80c66f42fe8554cfb344fee87ee5fe24a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_r50_fpn_1x_coco.py
@@ -0,0 +1,74 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='RepPointsDetector',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_input',
+ num_outs=5),
+ bbox_head=dict(
+ type='RepPointsHead',
+ num_classes=80,
+ in_channels=256,
+ feat_channels=256,
+ point_feat_channels=256,
+ stacked_convs=3,
+ num_points=9,
+ gradient_mul=0.1,
+ point_strides=[8, 16, 32, 64, 128],
+ point_base_scale=4,
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_init=dict(type='SmoothL1Loss', beta=0.11, loss_weight=0.5),
+ loss_bbox_refine=dict(type='SmoothL1Loss', beta=0.11, loss_weight=1.0),
+ transform_method='moment'),
+ # training and testing settings
+ train_cfg=dict(
+ init=dict(
+ assigner=dict(type='PointAssigner', scale=4, pos_num=1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ refine=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False)),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.5),
+ max_per_img=100))
+
+optim_wrapper = dict(optimizer=dict(lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a9909efe511da9423859de6ce096b1b1524a9b6f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-moment_x101-dconv-c3-c5_fpn-gn_head-gn_2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ dcn=dict(type='DCN', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/reppoints/reppoints-partial-minmax_r50_fpn-gn_head-gn_1x_coco.py b/grounding-dino/mmdetection/configs/reppoints/reppoints-partial-minmax_r50_fpn-gn_head-gn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..30f7844b8344110896c5d885bd0ca340322045e4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/reppoints/reppoints-partial-minmax_r50_fpn-gn_head-gn_1x_coco.py
@@ -0,0 +1,2 @@
+_base_ = './reppoints-moment_r50_fpn-gn_head-gn_1x_coco.py'
+model = dict(bbox_head=dict(transform_method='partial_minmax'))
diff --git a/grounding-dino/mmdetection/configs/res2net/README.md b/grounding-dino/mmdetection/configs/res2net/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..cd6732b60aff3d80eeb23f14a97657f57344a480
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/README.md
@@ -0,0 +1,77 @@
+# Res2Net
+
+> [Res2Net: A New Multi-scale Backbone Architecture](https://arxiv.org/abs/1904.01169)
+
+
+
+## Abstract
+
+Representing features at multiple scales is of great importance for numerous vision tasks. Recent advances in backbone convolutional neural networks (CNNs) continually demonstrate stronger multi-scale representation ability, leading to consistent performance gains on a wide range of applications. However, most existing methods represent the multi-scale features in a layer-wise manner. In this paper, we propose a novel building block for CNNs, namely Res2Net, by constructing hierarchical residual-like connections within one single residual block. The Res2Net represents multi-scale features at a granular level and increases the range of receptive fields for each network layer. The proposed Res2Net block can be plugged into the state-of-the-art backbone CNN models, e.g., ResNet, ResNeXt, and DLA. We evaluate the Res2Net block on all these models and demonstrate consistent performance gains over baseline models on widely-used datasets, e.g., CIFAR-100 and ImageNet. Further ablation studies and experimental results on representative computer vision tasks, i.e., object detection, class activation mapping, and salient object detection, further verify the superiority of the Res2Net over the state-of-the-art baseline methods.
+
+
+
+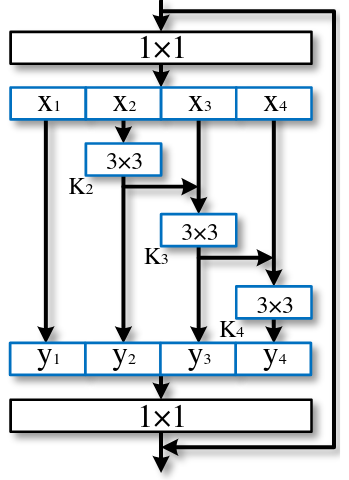 +
+
+
+## Introduction
+
+We propose a novel building block for CNNs, namely Res2Net, by constructing hierarchical residual-like connections within one single residual block. The Res2Net represents multi-scale features at a granular level and increases the range of receptive fields for each network layer.
+
+| Backbone | Params. | GFLOPs | top-1 err. | top-5 err. |
+| :---------------: | :-----: | :----: | :--------: | :--------: |
+| ResNet-101 | 44.6 M | 7.8 | 22.63 | 6.44 |
+| ResNeXt-101-64x4d | 83.5M | 15.5 | 20.40 | - |
+| HRNetV2p-W48 | 77.5M | 16.1 | 20.70 | 5.50 |
+| Res2Net-101 | 45.2M | 8.3 | 18.77 | 4.64 |
+
+Compared with other backbone networks, Res2Net requires fewer parameters and FLOPs.
+
+**Note:**
+
+- GFLOPs for classification are calculated with image size (224x224).
+
+## Results and Models
+
+### Faster R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :--------: | :-----: | :-----: | :------: | :------------: | :----: | :------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R2-101-FPN | pytorch | 2x | 7.4 | - | 43.0 | [config](./faster-rcnn_res2net-101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/res2net/faster_rcnn_r2_101_fpn_2x_coco/faster_rcnn_r2_101_fpn_2x_coco-175f1da6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/res2net/faster_rcnn_r2_101_fpn_2x_coco/faster_rcnn_r2_101_fpn_2x_coco_20200514_231734.log.json) |
+
+### Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :--------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :----------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R2-101-FPN | pytorch | 2x | 7.9 | - | 43.6 | 38.7 | [config](./mask-rcnn_res2net-101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/res2net/mask_rcnn_r2_101_fpn_2x_coco/mask_rcnn_r2_101_fpn_2x_coco-17f061e8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/res2net/mask_rcnn_r2_101_fpn_2x_coco/mask_rcnn_r2_101_fpn_2x_coco_20200515_002413.log.json) |
+
+### Cascade R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :--------: | :-----: | :-----: | :------: | :------------: | :----: | :--------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R2-101-FPN | pytorch | 20e | 7.8 | - | 45.7 | [config](./cascade-rcnn_res2net-101_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_rcnn_r2_101_fpn_20e_coco/cascade_rcnn_r2_101_fpn_20e_coco-f4b7b7db.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_rcnn_r2_101_fpn_20e_coco/cascade_rcnn_r2_101_fpn_20e_coco_20200515_091644.log.json) |
+
+### Cascade Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :--------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R2-101-FPN | pytorch | 20e | 9.5 | - | 46.4 | 40.0 | [config](./cascade-mask-rcnn_res2net-101_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_mask_rcnn_r2_101_fpn_20e_coco/cascade_mask_rcnn_r2_101_fpn_20e_coco-8a7b41e1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_mask_rcnn_r2_101_fpn_20e_coco/cascade_mask_rcnn_r2_101_fpn_20e_coco_20200515_091645.log.json) |
+
+### Hybrid Task Cascade (HTC)
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :--------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R2-101-FPN | pytorch | 20e | - | - | 47.5 | 41.6 | [config](./htc_res2net-101_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/res2net/htc_r2_101_fpn_20e_coco/htc_r2_101_fpn_20e_coco-3a8d2112.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/res2net/htc_r2_101_fpn_20e_coco/htc_r2_101_fpn_20e_coco_20200515_150029.log.json) |
+
+- Res2Net ImageNet pretrained models are in [Res2Net-PretrainedModels](https://github.com/Res2Net/Res2Net-PretrainedModels).
+- More applications of Res2Net are in [Res2Net-Github](https://github.com/Res2Net/).
+
+## Citation
+
+```latex
+@article{gao2019res2net,
+ title={Res2Net: A New Multi-scale Backbone Architecture},
+ author={Gao, Shang-Hua and Cheng, Ming-Ming and Zhao, Kai and Zhang, Xin-Yu and Yang, Ming-Hsuan and Torr, Philip},
+ journal={IEEE TPAMI},
+ year={2020},
+ doi={10.1109/TPAMI.2019.2938758},
+}
+```
diff --git a/grounding-dino/mmdetection/configs/res2net/cascade-mask-rcnn_res2net-101_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/res2net/cascade-mask-rcnn_res2net-101_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..21b6d2ea1c0167b8dd643211b520ac89ddd63e10
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/cascade-mask-rcnn_res2net-101_fpn_20e_coco.py
@@ -0,0 +1,10 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/res2net/cascade-rcnn_res2net-101_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/res2net/cascade-rcnn_res2net-101_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..670a77454e060f8f639dbdc40064b71cd82520e9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/cascade-rcnn_res2net-101_fpn_20e_coco.py
@@ -0,0 +1,10 @@
+_base_ = '../cascade_rcnn/cascade-rcnn_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/res2net/faster-rcnn_res2net-101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/res2net/faster-rcnn_res2net-101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..033cf574962f51a75c3fce1e74a22efb9c6320f2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/faster-rcnn_res2net-101_fpn_2x_coco.py
@@ -0,0 +1,10 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/res2net/htc_res2net-101_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/res2net/htc_res2net-101_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d5542fda4c8181a417f14817180296e84944b832
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/htc_res2net-101_fpn_20e_coco.py
@@ -0,0 +1,10 @@
+_base_ = '../htc/htc_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/res2net/mask-rcnn_res2net-101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/res2net/mask-rcnn_res2net-101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3a2d57304d07d9b3dbc58ee9a5d8f2355c6b4427
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/mask-rcnn_res2net-101_fpn_2x_coco.py
@@ -0,0 +1,10 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/res2net/metafile.yml b/grounding-dino/mmdetection/configs/res2net/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1d9f9ea023d895cd8a93b0f48b3bc4dee5a93e6b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/res2net/metafile.yml
@@ -0,0 +1,146 @@
+Models:
+ - Name: faster-rcnn_res2net-101_fpn_2x_coco
+ In Collection: Faster R-CNN
+ Config: configs/res2net/faster-rcnn_res2net-101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.4
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Res2Net
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/res2net/faster_rcnn_r2_101_fpn_2x_coco/faster_rcnn_r2_101_fpn_2x_coco-175f1da6.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.01169
+ Title: 'Res2Net for object detection and instance segmentation'
+ README: configs/res2net/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/res2net.py#L239
+ Version: v2.1.0
+
+ - Name: mask-rcnn_res2net-101_fpn_2x_coco
+ In Collection: Mask R-CNN
+ Config: configs/res2net/mask-rcnn_res2net-101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.9
+ Epochs: 24
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Res2Net
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/res2net/mask_rcnn_r2_101_fpn_2x_coco/mask_rcnn_r2_101_fpn_2x_coco-17f061e8.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.01169
+ Title: 'Res2Net for object detection and instance segmentation'
+ README: configs/res2net/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/res2net.py#L239
+ Version: v2.1.0
+
+ - Name: cascade-rcnn_res2net-101_fpn_20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/res2net/cascade-rcnn_res2net-101_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 7.8
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Res2Net
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_rcnn_r2_101_fpn_20e_coco/cascade_rcnn_r2_101_fpn_20e_coco-f4b7b7db.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.01169
+ Title: 'Res2Net for object detection and instance segmentation'
+ README: configs/res2net/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/res2net.py#L239
+ Version: v2.1.0
+
+ - Name: cascade-mask-rcnn_res2net-101_fpn_20e_coco
+ In Collection: Cascade R-CNN
+ Config: configs/res2net/cascade-mask-rcnn_res2net-101_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 9.5
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Res2Net
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/res2net/cascade_mask_rcnn_r2_101_fpn_20e_coco/cascade_mask_rcnn_r2_101_fpn_20e_coco-8a7b41e1.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.01169
+ Title: 'Res2Net for object detection and instance segmentation'
+ README: configs/res2net/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/res2net.py#L239
+ Version: v2.1.0
+
+ - Name: htc_res2net-101_fpn_20e_coco
+ In Collection: HTC
+ Config: configs/res2net/htc_res2net-101_fpn_20e_coco.py
+ Metadata:
+ Epochs: 20
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Res2Net
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/res2net/htc_r2_101_fpn_20e_coco/htc_r2_101_fpn_20e_coco-3a8d2112.pth
+ Paper:
+ URL: https://arxiv.org/abs/1904.01169
+ Title: 'Res2Net for object detection and instance segmentation'
+ README: configs/res2net/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.1.0/mmdet/models/backbones/res2net.py#L239
+ Version: v2.1.0
diff --git a/grounding-dino/mmdetection/configs/resnest/README.md b/grounding-dino/mmdetection/configs/resnest/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..a72f842357999af4bf48e0b26edd2581d01d7a80
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/README.md
@@ -0,0 +1,54 @@
+# ResNeSt
+
+> [ResNeSt: Split-Attention Networks](https://arxiv.org/abs/2004.08955)
+
+
+
+## Abstract
+
+It is well known that featuremap attention and multi-path representation are important for visual recognition. In this paper, we present a modularized architecture, which applies the channel-wise attention on different network branches to leverage their success in capturing cross-feature interactions and learning diverse representations. Our design results in a simple and unified computation block, which can be parameterized using only a few variables. Our model, named ResNeSt, outperforms EfficientNet in accuracy and latency trade-off on image classification. In addition, ResNeSt has achieved superior transfer learning results on several public benchmarks serving as the backbone, and has been adopted by the winning entries of COCO-LVIS challenge.
+
+
+
+ +
+
+
+## Results and Models
+
+### Faster R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------: | :-----: | :-----: | :------: | :------------: | :----: | :-----------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| S-50-FPN | pytorch | 1x | 4.8 | - | 42.0 | [config](./faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20200926_125502-20289c16.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco-20200926_125502.log.json) |
+| S-101-FPN | pytorch | 1x | 7.1 | - | 44.5 | [config](./faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201006_021058-421517f1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco-20201006_021058.log.json) |
+
+### Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :---------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| S-50-FPN | pytorch | 1x | 5.5 | - | 42.6 | 38.1 | [config](./mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20200926_125503-8a2c3d47.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco-20200926_125503.log.json) |
+| S-101-FPN | pytorch | 1x | 7.8 | - | 45.2 | 40.2 | [config](./mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201005_215831-af60cdf9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco-20201005_215831.log.json) |
+
+### Cascade R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------: | :-----: | :-----: | :------: | :------------: | :----: | :------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| S-50-FPN | pytorch | 1x | - | - | 44.5 | [config](./cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201122_213640-763cc7b5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco-20201005_113242.log.json) |
+| S-101-FPN | pytorch | 1x | 8.4 | - | 46.8 | [config](./cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201005_113242-b9459f8f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco-20201122_213640.log.json) |
+
+### Cascade Mask R-CNN
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :-----: | :-----: | :------: | :------------: | :----: | :-----: | :-----------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| S-50-FPN | pytorch | 1x | - | - | 45.4 | 39.5 | [config](./cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201122_104428-99eca4c7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco-20201122_104428.log.json) |
+| S-101-FPN | pytorch | 1x | 10.5 | - | 47.7 | 41.4 | [config](./cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201005_113243-42607475.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco-20201005_113243.log.json) |
+
+## Citation
+
+```latex
+@article{zhang2020resnest,
+title={ResNeSt: Split-Attention Networks},
+author={Zhang, Hang and Wu, Chongruo and Zhang, Zhongyue and Zhu, Yi and Zhang, Zhi and Lin, Haibin and Sun, Yue and He, Tong and Muller, Jonas and Manmatha, R. and Li, Mu and Smola, Alexander},
+journal={arXiv preprint arXiv:2004.08955},
+year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f4f19925788acc357e9720513d4f388598927a70
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py'
+model = dict(
+ backbone=dict(
+ stem_channels=128,
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='open-mmlab://resnest101')))
diff --git a/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c6ef41c05cd97d19320c02fb065b0cde1dda54d7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
@@ -0,0 +1,101 @@
+_base_ = '../cascade_rcnn/cascade-mask-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+
+model = dict(
+ # use ResNeSt img_norm
+ data_preprocessor=dict(
+ mean=[123.68, 116.779, 103.939],
+ std=[58.393, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ stem_channels=64,
+ depth=50,
+ radix=2,
+ reduction_factor=4,
+ avg_down_stride=True,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=False,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='open-mmlab://resnest50')),
+ roi_head=dict(
+ bbox_head=[
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_head=dict(norm_cfg=norm_cfg)))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ poly2mask=False),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9dbf3fae5ffb9382b053852c35e263f109668020
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py'
+model = dict(
+ backbone=dict(
+ stem_channels=128,
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='open-mmlab://resnest101')))
diff --git a/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ce7b56320a6511376237710c25061edd44b17dd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
@@ -0,0 +1,93 @@
+_base_ = '../cascade_rcnn/cascade-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ # use ResNeSt img_norm
+ data_preprocessor=dict(
+ mean=[123.68, 116.779, 103.939],
+ std=[58.393, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ stem_channels=64,
+ depth=50,
+ radix=2,
+ reduction_factor=4,
+ avg_down_stride=True,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=False,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='open-mmlab://resnest50')),
+ roi_head=dict(
+ bbox_head=[
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared4Conv1FCBBoxHead',
+ in_channels=256,
+ conv_out_channels=256,
+ fc_out_channels=1024,
+ norm_cfg=norm_cfg,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ], ))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f1e16321adff643d593268f868c09f5a318e7e93
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py'
+model = dict(
+ backbone=dict(
+ stem_channels=128,
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='open-mmlab://resnest101')))
diff --git a/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8f0ec6e07af1fcd250171cb769252eeb03f92da8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
@@ -0,0 +1,39 @@
+_base_ = '../faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ # use ResNeSt img_norm
+ data_preprocessor=dict(
+ mean=[123.68, 116.779, 103.939],
+ std=[58.393, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ stem_channels=64,
+ depth=50,
+ radix=2,
+ reduction_factor=4,
+ avg_down_stride=True,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=False,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='open-mmlab://resnest50')),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg)))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3edf49f052f1f3c875cca2c061276cc1aca77604
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py'
+model = dict(
+ backbone=dict(
+ stem_channels=128,
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='open-mmlab://resnest101')))
diff --git a/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py b/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c6f27000862d74e23a665f3bf8caae0ec4a3d6f5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
@@ -0,0 +1,46 @@
+_base_ = '../mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py'
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+model = dict(
+ # use ResNeSt img_norm
+ data_preprocessor=dict(
+ mean=[123.68, 116.779, 103.939],
+ std=[58.393, 57.12, 57.375],
+ bgr_to_rgb=True),
+ backbone=dict(
+ type='ResNeSt',
+ stem_channels=64,
+ depth=50,
+ radix=2,
+ reduction_factor=4,
+ avg_down_stride=True,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=norm_cfg,
+ norm_eval=False,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='open-mmlab://resnest50')),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg),
+ mask_head=dict(norm_cfg=norm_cfg)))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(
+ type='LoadAnnotations',
+ with_bbox=True,
+ with_mask=True,
+ poly2mask=False),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/resnest/metafile.yml b/grounding-dino/mmdetection/configs/resnest/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..265c94094975858ff0cc0ceac3870c9b4f9b9a84
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnest/metafile.yml
@@ -0,0 +1,230 @@
+Models:
+ - Name: faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/resnest/faster-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.8
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20200926_125502-20289c16.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/resnest/faster-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/faster_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201006_021058-421517f1.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/resnest/mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.6
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20200926_125503-8a2c3d47.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/resnest/mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.8
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201005_215831-af60cdf9.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/resnest/cascade-rcnn_s50_fpn_syncbn-backbone+head_ms-range-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201122_213640-763cc7b5.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/resnest/cascade-rcnn_s101_fpn_syncbn-backbone+head_ms-range-1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.4
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco/cascade_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain-range_1x_coco_20201005_113242-b9459f8f.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/resnest/cascade-mask-rcnn_s50_fpn_syncbn-backbone+head_ms-1x_coco.py
+ Metadata:
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.4
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s50_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201122_104428-99eca4c7.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
+
+ - Name: cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/resnest/cascade-mask-rcnn_s101_fpn_syncbn-backbone+head_ms-1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNeSt
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.7
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnest/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco/cascade_mask_rcnn_s101_fpn_syncbn-backbone%2Bhead_mstrain_1x_coco_20201005_113243-42607475.pth
+ Paper:
+ URL: https://arxiv.org/abs/2004.08955
+ Title: 'ResNeSt: Split-Attention Networks'
+ README: configs/resnest/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.7.0/mmdet/models/backbones/resnest.py#L273
+ Version: v2.7.0
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/README.md b/grounding-dino/mmdetection/configs/resnet_strikes_back/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..f015729a8d4ae4d78a909185a9b93b619e0f0f04
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/README.md
@@ -0,0 +1,40 @@
+# ResNet strikes back
+
+> [ResNet strikes back: An improved training procedure in timm](https://arxiv.org/abs/2110.00476)
+
+
+
+## Abstract
+
+The influential Residual Networks designed by He et al. remain the gold-standard architecture in numerous scientific publications. They typically serve as the default architecture in studies, or as baselines when new architectures are proposed. Yet there has been significant progress on best practices for training neural networks since the inception of the ResNet architecture in 2015. Novel optimization & dataaugmentation have increased the effectiveness of the training recipes.
+
+In this paper, we re-evaluate the performance of the vanilla ResNet-50 when trained with a procedure that integrates such advances. We share competitive training settings and pre-trained models in the timm open-source library, with the hope that they will serve as better baselines for future work. For instance, with our more demanding training setting, a vanilla ResNet-50 reaches 80.4% top-1 accuracy at resolution 224×224 on ImageNet-val without extra data or distillation. We also report the performance achieved with popular models with our training procedure.
+
+
+
+ +
+
+
+## Results and Models
+
+| Method | Backbone | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :----------------: | :------: | :-----: | :------: | :------------: | :---------: | :---------: | :------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50 rsb | 1x | 3.9 | - | 40.8 (+3.4) | - | [Config](./faster-rcnn_r50-rsb-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_162229-32ae82a9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_162229.log.json) |
+| Mask R-CNN | R-50 rsb | 1x | 4.5 | - | 41.2 (+3.0) | 38.2 (+3.0) | [Config](./mask-rcnn_r50-rsb-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_174054-06ce8ba0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_174054.log.json) |
+| Cascade Mask R-CNN | R-50 rsb | 1x | 6.2 | - | 44.8 (+3.6) | 39.9 (+3.6) | [Config](./cascade-mask-rcnn_r50-rsb-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_193636-8b9ad50f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_193636.log.json) |
+| RetinaNet | R-50 rsb | 1x | 3.8 | - | 39.0 (+2.5) | - | [Config](./retinanet_r50-rsb-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/retinanet_r50_fpn_rsb-pretrain_1x_coco/retinanet_r50_fpn_rsb-pretrain_1x_coco_20220113_175432-bd24aae9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/retinanet_r50_fpn_rsb-pretrain_1x_coco/retinanet_r50_fpn_rsb-pretrain_1x_coco_20220113_175432.log.json) |
+
+**Notes:**
+
+- 'rsb' is short for 'resnet strikes back'
+- We have done some grid searches on learning rate and weight decay and get these optimal hyper-parameters.
+
+## Citation
+
+```latex
+@article{wightman2021resnet,
+title={Resnet strikes back: An improved training procedure in timm},
+author={Ross Wightman, Hugo Touvron, Hervé Jégou},
+journal={arXiv preprint arXiv:2110.00476},
+year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/cascade-mask-rcnn_r50-rsb-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/resnet_strikes_back/cascade-mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..de7b95b0863d1ea89382fd9fa5852eccf0f34150
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/cascade-mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = [
+ '../_base_/models/cascade-mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+checkpoint = 'https://download.openmmlab.com/mmclassification/v0/resnet/resnet50_8xb256-rsb-a1-600e_in1k_20211228-20e21305.pth' # noqa
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone.', checkpoint=checkpoint)))
+
+optim_wrapper = dict(
+ optimizer=dict(_delete_=True, type='AdamW', lr=0.0002, weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0., bypass_duplicate=True))
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/faster-rcnn_r50-rsb-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/resnet_strikes_back/faster-rcnn_r50-rsb-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8c60f66a7ba8e5b6a7ee6af06e771b3c6ad71f6c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/faster-rcnn_r50-rsb-pre_fpn_1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+checkpoint = 'https://download.openmmlab.com/mmclassification/v0/resnet/resnet50_8xb256-rsb-a1-600e_in1k_20211228-20e21305.pth' # noqa
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone.', checkpoint=checkpoint)))
+
+optim_wrapper = dict(
+ optimizer=dict(_delete_=True, type='AdamW', lr=0.0002, weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0., bypass_duplicate=True))
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/mask-rcnn_r50-rsb-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/resnet_strikes_back/mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..85e25d392359b1a7811fb0c933ede5edacbfb9c3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+checkpoint = 'https://download.openmmlab.com/mmclassification/v0/resnet/resnet50_8xb256-rsb-a1-600e_in1k_20211228-20e21305.pth' # noqa
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone.', checkpoint=checkpoint)))
+
+optim_wrapper = dict(
+ optimizer=dict(_delete_=True, type='AdamW', lr=0.0002, weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0., bypass_duplicate=True))
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/metafile.yml b/grounding-dino/mmdetection/configs/resnet_strikes_back/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..74b152107d7a6d96f671c52d5273c79751122bfa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/metafile.yml
@@ -0,0 +1,116 @@
+Models:
+ - Name: faster-rcnn_r50_fpn_rsb-pretrain_1x_coco
+ In Collection: Faster R-CNN
+ Config: configs/resnet_strikes_back/faster-rcnn_r50-rsb-pre_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.9
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco/faster_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_162229-32ae82a9.pth
+ Paper:
+ URL: https://arxiv.org/abs/2110.00476
+ Title: 'ResNet strikes back: An improved training procedure in timm'
+ README: configs/resnet_strikes_back/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/configs/resnet_strikes_back/README.md
+ Version: v2.22.0
+
+ - Name: cascade-mask-rcnn_r50_fpn_rsb-pretrain_1x_coco
+ In Collection: Cascade R-CNN
+ Config: configs/resnet_strikes_back/cascade-mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 6.2
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/cascade_mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_193636-8b9ad50f.pth
+ Paper:
+ URL: https://arxiv.org/abs/2110.00476
+ Title: 'ResNet strikes back: An improved training procedure in timm'
+ README: configs/resnet_strikes_back/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/configs/resnet_strikes_back/README.md
+ Version: v2.22.0
+
+ - Name: retinanet_r50-rsb-pre_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/resnet_strikes_back/retinanet_r50-rsb-pre_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/retinanet_r50_fpn_rsb-pretrain_1x_coco/retinanet_r50_fpn_rsb-pretrain_1x_coco_20220113_175432-bd24aae9.pth
+ Paper:
+ URL: https://arxiv.org/abs/2110.00476
+ Title: 'ResNet strikes back: An improved training procedure in timm'
+ README: configs/resnet_strikes_back/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/configs/resnet_strikes_back/README.md
+ Version: v2.22.0
+
+ - Name: mask-rcnn_r50_fpn_rsb-pretrain_1x_coco
+ In Collection: Mask R-CNN
+ Config: configs/resnet_strikes_back/mask-rcnn_r50-rsb-pre_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 4.5
+ Epochs: 12
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 38.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/resnet_strikes_back/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco/mask_rcnn_r50_fpn_rsb-pretrain_1x_coco_20220113_174054-06ce8ba0.pth
+ Paper:
+ URL: https://arxiv.org/abs/2110.00476
+ Title: 'ResNet strikes back: An improved training procedure in timm'
+ README: configs/resnet_strikes_back/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.22.0/configs/resnet_strikes_back/README.md
+ Version: v2.22.0
diff --git a/grounding-dino/mmdetection/configs/resnet_strikes_back/retinanet_r50-rsb-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/resnet_strikes_back/retinanet_r50-rsb-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7ce7bfd87d6b41a36acc4ff207695e38ef89700c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/resnet_strikes_back/retinanet_r50-rsb-pre_fpn_1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+checkpoint = 'https://download.openmmlab.com/mmclassification/v0/resnet/resnet50_8xb256-rsb-a1-600e_in1k_20211228-20e21305.pth' # noqa
+model = dict(
+ backbone=dict(
+ init_cfg=dict(
+ type='Pretrained', prefix='backbone.', checkpoint=checkpoint)))
+
+optim_wrapper = dict(
+ optimizer=dict(_delete_=True, type='AdamW', lr=0.0001, weight_decay=0.05),
+ paramwise_cfg=dict(norm_decay_mult=0., bypass_duplicate=True))
diff --git a/grounding-dino/mmdetection/configs/retinanet/README.md b/grounding-dino/mmdetection/configs/retinanet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..b38335a3ce3585918cd45f70a18a2c703d201e9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/README.md
@@ -0,0 +1,53 @@
+# RetinaNet
+
+> [Focal Loss for Dense Object Detection](https://arxiv.org/abs/1708.02002)
+
+
+
+## Abstract
+
+The highest accuracy object detectors to date are based on a two-stage approach popularized by R-CNN, where a classifier is applied to a sparse set of candidate object locations. In contrast, one-stage detectors that are applied over a regular, dense sampling of possible object locations have the potential to be faster and simpler, but have trailed the accuracy of two-stage detectors thus far. In this paper, we investigate why this is the case. We discover that the extreme foreground-background class imbalance encountered during training of dense detectors is the central cause. We propose to address this class imbalance by reshaping the standard cross entropy loss such that it down-weights the loss assigned to well-classified examples. Our novel Focal Loss focuses training on a sparse set of hard examples and prevents the vast number of easy negatives from overwhelming the detector during training. To evaluate the effectiveness of our loss, we design and train a simple dense detector we call RetinaNet. Our results show that when trained with the focal loss, RetinaNet is able to match the speed of previous one-stage detectors while surpassing the accuracy of all existing state-of-the-art two-stage detectors.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :-------------: | :-----: | :----------: | :------: | :------------: | :----: | :---------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-18-FPN | pytorch | 1x | 1.7 | | 31.7 | [config](./retinanet_r18_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x_coco/retinanet_r18_fpn_1x_coco_20220407_171055-614fd399.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x_coco/retinanet_r18_fpn_1x_coco_20220407_171055.log.json) |
+| R-18-FPN | pytorch | 1x(1 x 8 BS) | 5.0 | | 31.7 | [config](./retinanet_r18_fpn_1xb8-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x8_1x_coco/retinanet_r18_fpn_1x8_1x_coco_20220407_171255-4ea310d7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x8_1x_coco/retinanet_r18_fpn_1x8_1x_coco_20220407_171255.log.json) |
+| R-50-FPN | caffe | 1x | 3.5 | 18.6 | 36.3 | [config](./retinanet_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_caffe_fpn_1x_coco/retinanet_r50_caffe_fpn_1x_coco_20200531-f11027c5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_caffe_fpn_1x_coco/retinanet_r50_caffe_fpn_1x_coco_20200531_012518.log.json) |
+| R-50-FPN | pytorch | 1x | 3.8 | 19.0 | 36.5 | [config](./retinanet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_1x_coco/retinanet_r50_fpn_1x_coco_20200130-c2398f9e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_1x_coco/retinanet_r50_fpn_1x_coco_20200130_002941.log.json) |
+| R-50-FPN (FP16) | pytorch | 1x | 2.8 | 31.6 | 36.4 | [config](./retinanet_r50_fpn_amp-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/fp16/retinanet_r50_fpn_fp16_1x_coco/retinanet_r50_fpn_fp16_1x_coco_20200702-0dbfb212.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/fp16/retinanet_r50_fpn_fp16_1x_coco/retinanet_r50_fpn_fp16_1x_coco_20200702_020127.log.json) |
+| R-50-FPN | pytorch | 2x | - | - | 37.4 | [config](./retinanet_r50_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_2x_coco/retinanet_r50_fpn_2x_coco_20200131-fdb43119.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_2x_coco/retinanet_r50_fpn_2x_coco_20200131_114738.log.json) |
+| R-101-FPN | caffe | 1x | 5.5 | 14.7 | 38.5 | [config](./retinanet_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_1x_coco/retinanet_r101_caffe_fpn_1x_coco_20200531-b428fa0f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_1x_coco/retinanet_r101_caffe_fpn_1x_coco_20200531_012536.log.json) |
+| R-101-FPN | pytorch | 1x | 5.7 | 15.0 | 38.5 | [config](./retinanet_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_1x_coco/retinanet_r101_fpn_1x_coco_20200130-7a93545f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_1x_coco/retinanet_r101_fpn_1x_coco_20200130_003055.log.json) |
+| R-101-FPN | pytorch | 2x | - | - | 38.9 | [config](./retinanet_r101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_2x_coco/retinanet_r101_fpn_2x_coco_20200131-5560aee8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_2x_coco/retinanet_r101_fpn_2x_coco_20200131_114859.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 7.0 | 12.1 | 39.9 | [config](./retinanet_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_1x_coco/retinanet_x101_32x4d_fpn_1x_coco_20200130-5c8b7ec4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_1x_coco/retinanet_x101_32x4d_fpn_1x_coco_20200130_003004.log.json) |
+| X-101-32x4d-FPN | pytorch | 2x | - | - | 40.1 | [config](./retinanet_x101-32x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_2x_coco/retinanet_x101_32x4d_fpn_2x_coco_20200131-237fc5e1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_2x_coco/retinanet_x101_32x4d_fpn_2x_coco_20200131_114812.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 10.0 | 8.7 | 41.0 | [config](./retinanet_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_1x_coco/retinanet_x101_64x4d_fpn_1x_coco_20200130-366f5af1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_1x_coco/retinanet_x101_64x4d_fpn_1x_coco_20200130_003008.log.json) |
+| X-101-64x4d-FPN | pytorch | 2x | - | - | 40.8 | [config](./retinanet_x101-64x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_2x_coco/retinanet_x101_64x4d_fpn_2x_coco_20200131-bca068ab.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_2x_coco/retinanet_x101_64x4d_fpn_2x_coco_20200131_114833.log.json) |
+
+## Pre-trained Models
+
+We also train some models with longer schedules and multi-scale training. The users could finetune them for downstream tasks.
+
+| Backbone | Style | Lr schd | Mem (GB) | box AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :----: | :--------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 3x | 3.5 | 39.5 | [config](./retinanet_r50_fpn_ms-640-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_mstrain_3x_coco/retinanet_r50_fpn_mstrain_3x_coco_20210718_220633-88476508.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_mstrain_3x_coco/retinanet_r50_fpn_mstrain_3x_coco_20210718_220633-88476508.log.json) |
+| R-101-FPN | caffe | 3x | 5.4 | 40.7 | [config](./retinanet_r101-caffe_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_mstrain_3x_coco/retinanet_r101_caffe_fpn_mstrain_3x_coco_20210721_063439-88a8a944.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_mstrain_3x_coco/retinanet_r101_caffe_fpn_mstrain_3x_coco_20210721_063439-88a8a944.log.json) |
+| R-101-FPN | pytorch | 3x | 5.4 | 41 | [config](./retinanet_r101_fpn_ms-640-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_mstrain_3x_coco/retinanet_r101_fpn_mstrain_3x_coco_20210720_214650-7ee888e0.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_mstrain_3x_coco/retinanet_r101_fpn_mstrain_3x_coco_20210720_214650-7ee888e0.log.json) |
+| X-101-64x4d-FPN | pytorch | 3x | 9.8 | 41.6 | [config](./retinanet_x101-64x4d_fpn_ms-640-800-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_mstrain_3x_coco/retinanet_x101_64x4d_fpn_mstrain_3x_coco_20210719_051838-022c2187.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_mstrain_3x_coco/retinanet_x101_64x4d_fpn_mstrain_3x_coco_20210719_051838-022c2187.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{lin2017focal,
+ title={Focal loss for dense object detection},
+ author={Lin, Tsung-Yi and Goyal, Priya and Girshick, Ross and He, Kaiming and Doll{\'a}r, Piotr},
+ booktitle={Proceedings of the IEEE international conference on computer vision},
+ year={2017}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/retinanet/metafile.yml b/grounding-dino/mmdetection/configs/retinanet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..0551541c59100d3cc8fb361cc8895c2dbd4cf8f3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/metafile.yml
@@ -0,0 +1,312 @@
+Collections:
+ - Name: RetinaNet
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Focal Loss
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1708.02002
+ Title: "Focal Loss for Dense Object Detection"
+ README: configs/retinanet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/retinanet.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: retinanet_r18_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r18_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 1.7
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 31.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x_coco/retinanet_r18_fpn_1x_coco_20220407_171055-614fd399.pth
+
+ - Name: retinanet_r18_fpn_1xb8-1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r18_fpn_1xb8-1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.0
+ Training Resources: 1x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 31.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r18_fpn_1x8_1x_coco/retinanet_r18_fpn_1x8_1x_coco_20220407_171255-4ea310d7.pth
+
+ - Name: retinanet_r50-caffe_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.5
+ inference time (ms/im):
+ - value: 53.76
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_caffe_fpn_1x_coco/retinanet_r50_caffe_fpn_1x_coco_20200531-f11027c5.pth
+
+ - Name: retinanet_r50_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ inference time (ms/im):
+ - value: 52.63
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_1x_coco/retinanet_r50_fpn_1x_coco_20200130-c2398f9e.pth
+
+ - Name: retinanet_r50_fpn_amp-1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r50_fpn_amp-1x_coco.py
+ Metadata:
+ Training Memory (GB): 2.8
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ - Mixed Precision Training
+ inference time (ms/im):
+ - value: 31.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP16
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 36.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/fp16/retinanet_r50_fpn_fp16_1x_coco/retinanet_r50_fpn_fp16_1x_coco_20200702-0dbfb212.pth
+
+ - Name: retinanet_r50_fpn_2x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r50_fpn_2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_2x_coco/retinanet_r50_fpn_2x_coco_20200131-fdb43119.pth
+
+ - Name: retinanet_r50_fpn_ms-640-800-3x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r50_fpn_ms-640-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r50_fpn_mstrain_3x_coco/retinanet_r50_fpn_mstrain_3x_coco_20210718_220633-88476508.pth
+
+ - Name: retinanet_r101-caffe_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.5
+ inference time (ms/im):
+ - value: 68.03
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_1x_coco/retinanet_r101_caffe_fpn_1x_coco_20200531-b428fa0f.pth
+
+ - Name: retinanet_r101-caffe_fpn_ms-3x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r101-caffe_fpn_ms-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_caffe_fpn_mstrain_3x_coco/retinanet_r101_caffe_fpn_mstrain_3x_coco_20210721_063439-88a8a944.pth
+
+ - Name: retinanet_r101_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r101_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.7
+ inference time (ms/im):
+ - value: 66.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_1x_coco/retinanet_r101_fpn_1x_coco_20200130-7a93545f.pth
+
+ - Name: retinanet_r101_fpn_2x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r101_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 5.7
+ inference time (ms/im):
+ - value: 66.67
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_2x_coco/retinanet_r101_fpn_2x_coco_20200131-5560aee8.pth
+
+ - Name: retinanet_r101_fpn_ms-640-800-3x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_r101_fpn_ms-640-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_r101_fpn_mstrain_3x_coco/retinanet_r101_fpn_mstrain_3x_coco_20210720_214650-7ee888e0.pth
+
+ - Name: retinanet_x101-32x4d_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 82.64
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_1x_coco/retinanet_x101_32x4d_fpn_1x_coco_20200130-5c8b7ec4.pth
+
+ - Name: retinanet_x101-32x4d_fpn_2x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_x101-32x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 82.64
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_32x4d_fpn_2x_coco/retinanet_x101_32x4d_fpn_2x_coco_20200131-237fc5e1.pth
+
+ - Name: retinanet_x101-64x4d_fpn_1x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.0
+ inference time (ms/im):
+ - value: 114.94
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_1x_coco/retinanet_x101_64x4d_fpn_1x_coco_20200130-366f5af1.pth
+
+ - Name: retinanet_x101-64x4d_fpn_2x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_x101-64x4d_fpn_2x_coco.py
+ Metadata:
+ Training Memory (GB): 10.0
+ inference time (ms/im):
+ - value: 114.94
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_2x_coco/retinanet_x101_64x4d_fpn_2x_coco_20200131-bca068ab.pth
+
+ - Name: retinanet_x101-64x4d_fpn_ms-640-800-3x_coco
+ In Collection: RetinaNet
+ Config: configs/retinanet/retinanet_x101-64x4d_fpn_ms-640-800-3x_coco.py
+ Metadata:
+ Epochs: 36
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/retinanet/retinanet_x101_64x4d_fpn_mstrain_3x_coco/retinanet_x101_64x4d_fpn_mstrain_3x_coco_20210719_051838-022c2187.pth
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1f3a4487103eea868eafe8539517b38455025bbe
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './retinanet_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cfe773459c2529079274b241f5f99ae66d8906ad
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101-caffe_fpn_ms-3x_coco.py
@@ -0,0 +1,8 @@
+_base_ = './retinanet_r50-caffe_fpn_ms-3x_coco.py'
+# learning policy
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a7f06002413dcdf2716975655a582a3eefaf007a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..721112a221953bb86dc3259e3991d7f0f740b26c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './retinanet_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..be018eaac672a4c1c3a61eac9940c4d28ea4fb40
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './retinanet_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_ms-640-800-3x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_ms-640-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..566397227f7861a268c4cc4e111279b95b620ab8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r101_fpn_ms-640-800-3x_coco.py
@@ -0,0 +1,9 @@
+_base_ = ['../_base_/models/retinanet_r50_fpn.py', '../common/ms_3x_coco.py']
+# optimizer
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..960211806756d38cf74eed998addcca3f8467a4d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1x_coco.py
@@ -0,0 +1,20 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+# TODO: support auto scaling lr
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (2 samples per GPU)
+# auto_scale_lr = dict(base_batch_size=16)
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1xb8-1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1xb8-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d2e88d68e3366671e402b1766d3b456593262a9b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_1xb8-1x_coco.py
@@ -0,0 +1,24 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# data
+train_dataloader = dict(batch_size=8)
+
+# model
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
+
+# Note: If the learning rate is set to 0.0025, the mAP will be 32.4.
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.005, momentum=0.9, weight_decay=0.0001))
+# TODO: support auto scaling lr
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (1 GPUs) x (8 samples per GPU)
+# auto_scale_lr = dict(base_batch_size=8)
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d6833f3f4711ec28a25ae8a51687fc4ac13ffb89
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r18_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './retinanet_r50_fpn_8xb8-amp-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6ba1cdddc4707b40f549189f768457312635669d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ # use caffe img_norm
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..93687d8c27b73ae2a172b45a733345e5fc036f03
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-1x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './retinanet_r50-caffe_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile'),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6d1604fb9efd5deb11ffc04f6f9685739f82aea9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './retinanet_r50-caffe_fpn_ms-1x_coco.py'
+# training schedule for 2x
+train_cfg = dict(max_epochs=24)
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5a6d42a13c27d5fc0b8072e2c96ef5d15a0f248c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50-caffe_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './retinanet_r50-caffe_fpn_ms-1x_coco.py'
+
+# training schedule for 2x
+train_cfg = dict(max_epochs=36)
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=36,
+ by_epoch=True,
+ milestones=[28, 34],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..00d2567b245dba2b2be815a92146ea1364e1e799
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_1x_coco.py
@@ -0,0 +1,10 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py',
+ './retinanet_tta.py'
+]
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..47511b78ed2edb43121de2fc27986f6bb81abcfa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_2x_coco.py
@@ -0,0 +1,25 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# training schedule for 2x
+train_cfg = dict(max_epochs=24)
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=24,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_8xb8-amp-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_8xb8-amp-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2f10db2f3c84d4b1970f13f54c563408487d04af
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_8xb8-amp-lsj-200e_coco.py
@@ -0,0 +1,21 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../common/lsj-200e_coco-detection.py'
+]
+
+image_size = (1024, 1024)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+model = dict(data_preprocessor=dict(batch_augments=batch_augments))
+
+train_dataloader = dict(batch_size=8, num_workers=4)
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.01 * 4, momentum=0.9, weight_decay=0.00004))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_90k_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1e1b2fd950a0293220cc93ce3f3b377b4163f3aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_90k_coco.py
@@ -0,0 +1,24 @@
+_base_ = 'retinanet_r50_fpn_1x_coco.py'
+
+# training schedule for 90k
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=90000,
+ val_interval=10000)
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=90000,
+ by_epoch=False,
+ milestones=[60000, 80000],
+ gamma=0.1)
+]
+train_dataloader = dict(sampler=dict(type='InfiniteSampler'))
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=10000))
+
+log_processor = dict(by_epoch=False)
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_amp-1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_amp-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..acf5266337b8e73957a1cdf2b06076c1733b4d56
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_amp-1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './retinanet_r50_fpn_1x_coco.py'
+
+# MMEngine support the following two ways, users can choose
+# according to convenience
+# optim_wrapper = dict(type='AmpOptimWrapper')
+_base_.optim_wrapper.type = 'AmpOptimWrapper'
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_ms-640-800-3x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_ms-640-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d91cf8ce0df15968706631d7eac76e834cba93dc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_r50_fpn_ms-640-800-3x_coco.py
@@ -0,0 +1,4 @@
+_base_ = ['../_base_/models/retinanet_r50_fpn.py', '../common/ms_3x_coco.py']
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_tta.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_tta.py
new file mode 100644
index 0000000000000000000000000000000000000000..d0f37e0ab25e2aff1ad55e76a7ee02777293d507
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_tta.py
@@ -0,0 +1,23 @@
+tta_model = dict(
+ type='DetTTAModel',
+ tta_cfg=dict(nms=dict(type='nms', iou_threshold=0.5), max_per_img=100))
+
+img_scales = [(1333, 800), (666, 400), (2000, 1200)]
+tta_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=None),
+ dict(
+ type='TestTimeAug',
+ transforms=[[
+ dict(type='Resize', scale=s, keep_ratio=True) for s in img_scales
+ ], [
+ dict(type='RandomFlip', prob=1.),
+ dict(type='RandomFlip', prob=0.)
+ ], [dict(type='LoadAnnotations', with_bbox=True)],
+ [
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape',
+ 'img_shape', 'scale_factor', 'flip',
+ 'flip_direction'))
+ ]])
+]
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..765a4c2cc0f69bf13891bf371c94c17b6cd5f30c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..14de96faf70180d7828a670630a8f48a3cd1081d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-32x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..948cd18e4d995d18d947b345ba7229b5cad60eb1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ad04b6eea793add40c81d1d7096481597357d5bd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './retinanet_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_ms-640-800-3x_coco.py b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_ms-640-800-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..853134160cd2128cac7954cca7e008444522fd2c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/retinanet/retinanet_x101-64x4d_fpn_ms-640-800-3x_coco.py
@@ -0,0 +1,11 @@
+_base_ = ['../_base_/models/retinanet_r50_fpn.py', '../common/ms_3x_coco.py']
+# optimizer
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
+optim_wrapper = dict(optimizer=dict(type='SGD', lr=0.01))
diff --git a/grounding-dino/mmdetection/configs/rpn/README.md b/grounding-dino/mmdetection/configs/rpn/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..bd328b4746d4125f68554eeeca3d2d765c638a5a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/README.md
@@ -0,0 +1,39 @@
+# RPN
+
+> [Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks](https://arxiv.org/abs/1506.01497)
+
+
+
+## Abstract
+
+State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet and Fast R-CNN have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully convolutional network that simultaneously predicts object bounds and objectness scores at each position. The RPN is trained end-to-end to generate high-quality region proposals, which are used by Fast R-CNN for detection. We further merge RPN and Fast R-CNN into a single network by sharing their convolutional features---using the recently popular terminology of neural networks with 'attention' mechanisms, the RPN component tells the unified network where to look. For the very deep VGG-16 model, our detection system has a frame rate of 5fps (including all steps) on a GPU, while achieving state-of-the-art object detection accuracy on PASCAL VOC 2007, 2012, and MS COCO datasets with only 300 proposals per image. In ILSVRC and COCO 2015 competitions, Faster R-CNN and RPN are the foundations of the 1st-place winning entries in several tracks.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | AR1000 | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :------------: | :----: | :---------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | caffe | 1x | 3.5 | 22.6 | 58.7 | [config](./rpn_r50-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_caffe_fpn_1x_coco/rpn_r50_caffe_fpn_1x_coco_20200531-5b903a37.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_caffe_fpn_1x_coco/rpn_r50_caffe_fpn_1x_coco_20200531_012334.log.json) |
+| R-50-FPN | pytorch | 1x | 3.8 | 22.3 | 58.2 | [config](./rpn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_1x_coco/rpn_r50_fpn_1x_coco_20200218-5525fa2e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_1x_coco/rpn_r50_fpn_1x_coco_20200218_151240.log.json) |
+| R-50-FPN | pytorch | 2x | - | - | 58.6 | [config](./rpn_r50_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_2x_coco/rpn_r50_fpn_2x_coco_20200131-0728c9b3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_2x_coco/rpn_r50_fpn_2x_coco_20200131_190631.log.json) |
+| R-101-FPN | caffe | 1x | 5.4 | 17.3 | 60.0 | [config](./rpn_r101-caffe_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_caffe_fpn_1x_coco/rpn_r101_caffe_fpn_1x_coco_20200531-0629a2e2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_caffe_fpn_1x_coco/rpn_r101_caffe_fpn_1x_coco_20200531_012345.log.json) |
+| R-101-FPN | pytorch | 1x | 5.8 | 16.5 | 59.7 | [config](./rpn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_fpn_1x_coco/rpn_r101_fpn_1x_coco_20200131-2ace2249.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_fpn_1x_coco/rpn_r101_fpn_1x_coco_20200131_191000.log.json) |
+| R-101-FPN | pytorch | 2x | - | - | 60.2 | [config](./rpn_r101_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_fpn_2x_coco/rpn_r101_fpn_2x_coco_20200131-24e3db1a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_fpn_2x_coco/rpn_r101_fpn_2x_coco_20200131_191106.log.json) |
+| X-101-32x4d-FPN | pytorch | 1x | 7.0 | 13.0 | 60.6 | [config](./rpn_x101-32x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_1x_coco/rpn_x101_32x4d_fpn_1x_coco_20200219-b02646c6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_1x_coco/rpn_x101_32x4d_fpn_1x_coco_20200219_012037.log.json) |
+| X-101-32x4d-FPN | pytorch | 2x | - | - | 61.1 | [config](./rpn_x101-32x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_2x_coco/rpn_x101_32x4d_fpn_2x_coco_20200208-d22bd0bb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_2x_coco/rpn_x101_32x4d_fpn_2x_coco_20200208_200752.log.json) |
+| X-101-64x4d-FPN | pytorch | 1x | 10.1 | 9.1 | 61.0 | [config](./rpn_x101-64x4d_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_1x_coco/rpn_x101_64x4d_fpn_1x_coco_20200208-cde6f7dd.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_1x_coco/rpn_x101_64x4d_fpn_1x_coco_20200208_200752.log.json) |
+| X-101-64x4d-FPN | pytorch | 2x | - | - | 61.5 | [config](./rpn_x101-64x4d_fpn_2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_2x_coco/rpn_x101_64x4d_fpn_2x_coco_20200208-c65f524f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_2x_coco/rpn_x101_64x4d_fpn_2x_coco_20200208_200752.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{ren2015faster,
+ title={Faster r-cnn: Towards real-time object detection with region proposal networks},
+ author={Ren, Shaoqing and He, Kaiming and Girshick, Ross and Sun, Jian},
+ booktitle={Advances in neural information processing systems},
+ year={2015}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/rpn/metafile.yml b/grounding-dino/mmdetection/configs/rpn/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9796ead6d2ed28f0e10e16165103e31c289dae26
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/metafile.yml
@@ -0,0 +1,127 @@
+Collections:
+ - Name: RPN
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1506.01497
+ Title: "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks"
+ README: configs/rpn/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/mmdet/models/detectors/rpn.py#L6
+ Version: v2.0.0
+
+Models:
+ - Name: rpn_r50-caffe_fpn_1x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_r50-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.5
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 58.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_caffe_fpn_1x_coco/rpn_r50_caffe_fpn_1x_coco_20200531-5b903a37.pth
+
+ - Name: rpn_r50_fpn_1x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 58.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_1x_coco/rpn_r50_fpn_1x_coco_20200218-5525fa2e.pth
+
+ - Name: rpn_r50_fpn_2x_coco
+ In Collection: RPN
+ Config: rpn_r50_fpn_2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 58.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r50_fpn_2x_coco/rpn_r50_fpn_2x_coco_20200131-0728c9b3.pth
+
+ - Name: rpn_r101-caffe_fpn_1x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_r101-caffe_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.4
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 60.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_r101_caffe_fpn_1x_coco/rpn_r101_caffe_fpn_1x_coco_20200531-0629a2e2.pth
+
+ - Name: rpn_x101-32x4d_fpn_1x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_x101-32x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 60.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_1x_coco/rpn_x101_32x4d_fpn_1x_coco_20200219-b02646c6.pth
+
+ - Name: rpn_x101-32x4d_fpn_2x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_x101-32x4d_fpn_2x_coco.py
+ Metadata:
+ Training Resources: 8x V100 GPUs
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 61.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_32x4d_fpn_2x_coco/rpn_x101_32x4d_fpn_2x_coco_20200208-d22bd0bb.pth
+
+ - Name: rpn_x101-64x4d_fpn_1x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_x101-64x4d_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 10.1
+ Training Resources: 8x V100 GPUs
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 61.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_1x_coco/rpn_x101_64x4d_fpn_1x_coco_20200208-cde6f7dd.pth
+
+ - Name: rpn_x101-64x4d_fpn_2x_coco
+ In Collection: RPN
+ Config: configs/rpn/rpn_x101-64x4d_fpn_2x_coco.py
+ Metadata:
+ Training Resources: 8x V100 GPUs
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ AR@1000: 61.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/rpn/rpn_x101_64x4d_fpn_2x_coco/rpn_x101_64x4d_fpn_2x_coco_20200208-c65f524f.pth
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r101-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r101-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..22977af8cb761f9415c55f8fa6d458937a00ba06
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r101-caffe_fpn_1x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './rpn_r50-caffe_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet101_caffe')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..962728ff08abb4652c617a085649575b6cfdcbf8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './rpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ac7671c1c2421c0caa7b42d012cc3a2edc068934
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r101_fpn_2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './rpn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe-c4_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe-c4_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..76b878c874d6545e537ee8a9618e83bb095de281
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe-c4_1x_coco.py
@@ -0,0 +1,8 @@
+_base_ = [
+ '../_base_/models/rpn_r50-caffe-c4.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+val_evaluator = dict(metric='proposal_fast')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..530f365210572f9bf55ca2775bfdbeba98567076
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r50-caffe_fpn_1x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './rpn_r50_fpn_1x_coco.py'
+# use caffe img_norm
+model = dict(
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ norm_cfg=dict(requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..7fe88d395b8a32e7513ede3c0c724e29b3554da6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_1x_coco.py
@@ -0,0 +1,36 @@
+_base_ = [
+ '../_base_/models/rpn_r50_fpn.py', '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+val_evaluator = dict(metric='proposal_fast')
+test_evaluator = val_evaluator
+
+# inference on val dataset and dump the proposals with evaluate metric
+# data_root = 'data/coco/'
+# test_evaluator = [
+# dict(
+# type='DumpProposals',
+# output_dir=data_root + 'proposals/',
+# proposals_file='rpn_r50_fpn_1x_val2017.pkl'),
+# dict(
+# type='CocoMetric',
+# ann_file=data_root + 'annotations/instances_val2017.json',
+# metric='proposal_fast',
+# backend_args={{_base_.backend_args}},
+# format_only=False)
+# ]
+
+# inference on training dataset and dump the proposals without evaluate metric
+# data_root = 'data/coco/'
+# test_dataloader = dict(
+# dataset=dict(
+# ann_file='annotations/instances_train2017.json',
+# data_prefix=dict(img='train2017/')))
+#
+# test_evaluator = [
+# dict(
+# type='DumpProposals',
+# output_dir=data_root + 'proposals/',
+# proposals_file='rpn_r50_fpn_1x_train2017.pkl'),
+# ]
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0ebccbcfaf394fcbb4fbdaea51abdd583f628cac
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_r50_fpn_2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './rpn_r50_fpn_1x_coco.py'
+
+# learning policy
+max_epochs = 24
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d0c73948ac56afa34b9d6c8d22d6158271306b8c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './rpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c6880b762abc8f5d3bf12f278054d76958756fb2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_x101-32x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './rpn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..96e691a912c424f09add038c75631a2e1fefeffc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_1x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './rpn_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4182a39667c47d774a1df9d34a1bc2fe60b45538
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rpn/rpn_x101-64x4d_fpn_2x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './rpn_r50_fpn_2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/rtmdet/README.md b/grounding-dino/mmdetection/configs/rtmdet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1677184af761a5b6ac5d643ddf7e2d802f96723e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/rtmdet/README.md
@@ -0,0 +1,457 @@
+# RTMDet: An Empirical Study of Designing Real-Time Object Detectors
+
+> [RTMDet: An Empirical Study of Designing Real-Time Object Detectors](https://arxiv.org/abs/2212.07784)
+
+[](https://paperswithcode.com/sota/real-time-instance-segmentation-on-mscoco?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-dota-1?p=rtmdet-an-empirical-study-of-designing-real)
+[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-hrsc2016?p=rtmdet-an-empirical-study-of-designing-real)
+
+
+
+## Abstract
+
+In this paper, we aim to design an efficient real-time object detector that exceeds the YOLO series and is easily extensible for many object recognition tasks such as instance segmentation and rotated object detection. To obtain a more efficient model architecture, we explore an architecture that has compatible capacities in the backbone and neck, constructed by a basic building block that consists of large-kernel depth-wise convolutions. We further introduce soft labels when calculating matching costs in the dynamic label assignment to improve accuracy. Together with better training techniques, the resulting object detector, named RTMDet, achieves 52.8% AP on COCO with 300+ FPS on an NVIDIA 3090 GPU, outperforming the current mainstream industrial detectors. RTMDet achieves the best parameter-accuracy trade-off with tiny/small/medium/large/extra-large model sizes for various application scenarios, and obtains new state-of-the-art performance on real-time instance segmentation and rotated object detection. We hope the experimental results can provide new insights into designing versatile real-time object detectors for many object recognition tasks.
+
+
+
+ +
+
+
+## Results and Models
+
+### Object Detection
+
+| Model | size | box AP | Params(M) | FLOPS(G) | TRT-FP16-Latency(ms)
+RTX3090 | TRT-FP16-Latency(ms)
T4 | Config | Download | +| :-----------------: | :--: | :----: | :-------: | :------: | :-----------------------------: | :------------------------: | :------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMDet-tiny | 640 | 41.1 | 4.8 | 8.1 | 0.98 | 2.34 | [config](./rtmdet_tiny_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_tiny_8xb32-300e_coco/rtmdet_tiny_8xb32-300e_coco_20220902_112414-78e30dcc.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_tiny_8xb32-300e_coco/rtmdet_tiny_8xb32-300e_coco_20220902_112414.log.json) | +| RTMDet-s | 640 | 44.6 | 8.89 | 14.8 | 1.22 | 2.96 | [config](./rtmdet_s_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_s_8xb32-300e_coco/rtmdet_s_8xb32-300e_coco_20220905_161602-387a891e.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_s_8xb32-300e_coco/rtmdet_s_8xb32-300e_coco_20220905_161602.log.json) | +| RTMDet-m | 640 | 49.4 | 24.71 | 39.27 | 1.62 | 6.41 | [config](./rtmdet_m_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220-229f527c.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_m_8xb32-300e_coco/rtmdet_m_8xb32-300e_coco_20220719_112220.log.json) | +| RTMDet-l | 640 | 51.5 | 52.3 | 80.23 | 2.44 | 10.32 | [config](./rtmdet_l_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_l_8xb32-300e_coco/rtmdet_l_8xb32-300e_coco_20220719_112030-5a0be7c4.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_l_8xb32-300e_coco/rtmdet_l_8xb32-300e_coco_20220719_112030.log.json) | +| RTMDet-x | 640 | 52.8 | 94.86 | 141.67 | 3.10 | 18.80 | [config](./rtmdet_x_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_x_8xb32-300e_coco/rtmdet_x_8xb32-300e_coco_20220715_230555-cc79b9ae.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_x_8xb32-300e_coco/rtmdet_x_8xb32-300e_coco_20220715_230555.log.json) | +| RTMDet-x-P6 | 1280 | 54.9 | | | | | [config](./rtmdet_x_p6_4xb8-300e_coco.py) | [model](https://github.com/orange0-jp/orange-weights/releases/download/v0.1.0rtmdet-p6/rtmdet_x_p6_4xb8-300e_coco-bf32be58.pth) | +| RTMDet-l-ConvNeXt-B | 640 | 53.1 | | | | | [config](./rtmdet_l_convnext_b_4xb32-100e_coco.py) | [model](https://github.com/orange0-jp/orange-weights/releases/download/v0.1.0rtmdet-swin-convnext/rtmdet_l_convnext_b_4xb32-100e_coco-d4731b3d.pth) | +| RTMDet-l-Swin-B | 640 | 52.4 | | | | | [config](./rtmdet_l_swin_b_4xb32-100e_coco.py) | [model](https://github.com/orange0-jp/orange-weights/releases/download/v0.1.0rtmdet-swin-convnext/rtmdet_l_swin_b_4xb32-100e_coco-0828ce5d.pth) | +| RTMDet-l-Swin-B-P6 | 1280 | 56.4 | | | | | [config](./rtmdet_l_swin_b_p6_4xb16-100e_coco.py) | [model](https://github.com/orange0-jp/orange-weights/releases/download/v0.1.0rtmdet-swin-convnext/rtmdet_l_swin_b_p6_4xb16-100e_coco-a1486b6f.pth) | + +**Note**: + +1. We implement a fast training version of RTMDet in [MMYOLO](https://github.com/open-mmlab/mmyolo). Its training speed is **2.6 times faster** and memory requirement is lower! Try it [here](https://github.com/open-mmlab/mmyolo/tree/main/configs/rtmdet)! +2. The inference speed of RTMDet is measured with TensorRT 8.4.3, cuDNN 8.2.0, FP16, batch size=1, and without NMS. +3. For a fair comparison, the config of bbox postprocessing is changed to be consistent with YOLOv5/6/7 after [PR#9494](https://github.com/open-mmlab/mmdetection/pull/9494), bringing about 0.1~0.3% AP improvement. + +### Instance Segmentation + +RTMDet-Ins is the state-of-the-art real-time instance segmentation on coco dataset: + +[](https://paperswithcode.com/sota/real-time-instance-segmentation-on-mscoco?p=rtmdet-an-empirical-study-of-designing-real) + +| Model | size | box AP | mask AP | Params(M) | FLOPS(G) | TRT-FP16-Latency(ms) | Config | Download | +| :-------------: | :--: | :----: | :-----: | :-------: | :------: | :------------------: | :--------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMDet-Ins-tiny | 640 | 40.5 | 35.4 | 5.6 | 11.8 | 1.70 | [config](./rtmdet-ins_tiny_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_tiny_8xb32-300e_coco/rtmdet-ins_tiny_8xb32-300e_coco_20221130_151727-ec670f7e.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_tiny_8xb32-300e_coco/rtmdet-ins_tiny_8xb32-300e_coco_20221130_151727.log.json) | +| RTMDet-Ins-s | 640 | 44.0 | 38.7 | 10.18 | 21.5 | 1.93 | [config](./rtmdet-ins_s_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_s_8xb32-300e_coco/rtmdet-ins_s_8xb32-300e_coco_20221121_212604-fdc5d7ec.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_s_8xb32-300e_coco/rtmdet-ins_s_8xb32-300e_coco_20221121_212604.log.json) | +| RTMDet-Ins-m | 640 | 48.8 | 42.1 | 27.58 | 54.13 | 2.69 | [config](./rtmdet-ins_m_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_m_8xb32-300e_coco/rtmdet-ins_m_8xb32-300e_coco_20221123_001039-6eba602e.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_m_8xb32-300e_coco/rtmdet-ins_m_8xb32-300e_coco_20221123_001039.log.json) | +| RTMDet-Ins-l | 640 | 51.2 | 43.7 | 57.37 | 106.56 | 3.68 | [config](./rtmdet-ins_l_8xb32-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_l_8xb32-300e_coco/rtmdet-ins_l_8xb32-300e_coco_20221124_103237-78d1d652.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_l_8xb32-300e_coco/rtmdet-ins_l_8xb32-300e_coco_20221124_103237.log.json) | +| RTMDet-Ins-x | 640 | 52.4 | 44.6 | 102.7 | 182.7 | 5.31 | [config](./rtmdet-ins_x_8xb16-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_x_8xb16-300e_coco/rtmdet-ins_x_8xb16-300e_coco_20221124_111313-33d4595b.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet-ins_x_8xb16-300e_coco/rtmdet-ins_x_8xb16-300e_coco_20221124_111313.log.json) | + +**Note**: + +1. The inference speed of RTMDet-Ins is measured on an NVIDIA 3090 GPU with TensorRT 8.4.3, cuDNN 8.2.0, FP16, batch size=1. Top 100 masks are kept and the post process latency is included. + +### Rotated Object Detection + +RTMDet-R achieves state-of-the-art on various remote sensing datasets. + +[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-dota-1?p=rtmdet-an-empirical-study-of-designing-real) + +[](https://paperswithcode.com/sota/one-stage-anchor-free-oriented-object-1?p=rtmdet-an-empirical-study-of-designing-real) + +[](https://paperswithcode.com/sota/object-detection-in-aerial-images-on-hrsc2016?p=rtmdet-an-empirical-study-of-designing-real) + +[](https://paperswithcode.com/sota/one-stage-anchor-free-oriented-object-3?p=rtmdet-an-empirical-study-of-designing-real) + +Models and configs of RTMDet-R are available in [MMRotate](https://github.com/open-mmlab/mmrotate/tree/1.x/configs/rotated_rtmdet). + +| Backbone | pretrain | Aug | mmAP | mAP50 | mAP75 | Params(M) | FLOPS(G) | TRT-FP16-Latency(ms) | Config | Download | +| :---------: | :------: | :---: | :---: | :---: | :---: | :-------: | :------: | :------------------: | :---------------------------------------------------------------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: | +| RTMDet-tiny | IN | RR | 47.37 | 75.36 | 50.64 | 4.88 | 20.45 | 4.40 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota/rotated_rtmdet_tiny-3x-dota-9d821076.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota/rotated_rtmdet_tiny-3x-dota_20221201_120814.json) | +| RTMDet-tiny | IN | MS+RR | 53.59 | 79.82 | 58.87 | 4.88 | 20.45 | 4.40 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota_ms.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota_ms/rotated_rtmdet_tiny-3x-dota_ms-f12286ff.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_tiny-3x-dota_ms/rotated_rtmdet_tiny-3x-dota_ms_20221113_201235.log) | +| RTMDet-s | IN | RR | 48.16 | 76.93 | 50.59 | 8.86 | 37.62 | 4.86 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_s-3x-dota.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_s-3x-dota/rotated_rtmdet_s-3x-dota-11f6ccf5.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_s-3x-dota/rotated_rtmdet_s-3x-dota_20221124_081442.json) | +| RTMDet-s | IN | MS+RR | 54.43 | 79.98 | 60.07 | 8.86 | 37.62 | 4.86 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_s-3x-dota_ms.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_s-3x-dota_ms/rotated_rtmdet_s-3x-dota_ms-20ead048.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_s-3x-dota_ms/rotated_rtmdet_s-3x-dota_ms_20221113_201055.json) | +| RTMDet-m | IN | RR | 50.56 | 78.24 | 54.47 | 24.67 | 99.76 | 7.82 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_m-3x-dota.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_m-3x-dota/rotated_rtmdet_m-3x-dota-beeadda6.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_m-3x-dota/rotated_rtmdet_m-3x-dota_20221122_011234.json) | +| RTMDet-m | IN | MS+RR | 55.00 | 80.26 | 61.26 | 24.67 | 99.76 | 7.82 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_m-3x-dota_ms.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_m-3x-dota_ms/rotated_rtmdet_m-3x-dota_ms-c71eb375.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_m-3x-dota_ms/rotated_rtmdet_m-3x-dota_ms_20221122_011234.json) | +| RTMDet-l | IN | RR | 51.01 | 78.85 | 55.21 | 52.27 | 204.21 | 10.82 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_l-3x-dota.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-3x-dota/rotated_rtmdet_l-3x-dota-23992372.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-3x-dota/rotated_rtmdet_l-3x-dota_20221122_011241.json) | +| RTMDet-l | IN | MS+RR | 55.52 | 80.54 | 61.47 | 52.27 | 204.21 | 10.82 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_l-3x-dota_ms.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-3x-dota_ms/rotated_rtmdet_l-3x-dota_ms-2738da34.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-3x-dota_ms/rotated_rtmdet_l-3x-dota_ms_20221122_011241.json) | +| RTMDet-l | COCO | MS+RR | 56.74 | 81.33 | 63.45 | 52.27 | 204.21 | 10.82 | [config](https://github.com/open-mmlab/mmrotate/edit/1.x/configs/rotated_rtmdet/rotated_rtmdet_l-coco_pretrain-3x-dota_ms.py) | [model](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-coco_pretrain-3x-dota_ms/rotated_rtmdet_l-coco_pretrain-3x-dota_ms-06d248a2.pth) \| [log](https://download.openmmlab.com/mmrotate/v1.0/rotated_rtmdet/rotated_rtmdet_l-coco_pretrain-3x-dota_ms/rotated_rtmdet_l-coco_pretrain-3x-dota_ms_20221113_202010.json) | + +### Classification + +We also provide the imagenet classification configs of the RTMDet backbone. Find more details in the [classification folder](./classification). + +| Model | resolution | Params(M) | Flops(G) | Top-1 (%) | Top-5 (%) | Download | +| :----------: | :--------: | :-------: | :------: | :-------: | :-------: | :---------------------------------------------------------------------------------------------------------------------------------: | +| CSPNeXt-tiny | 224x224 | 2.73 | 0.34 | 69.44 | 89.45 | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-tiny_imagenet_600e-3a2dd350.pth) | +| CSPNeXt-s | 224x224 | 4.89 | 0.66 | 74.41 | 92.23 | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-s_imagenet_600e-ea671761.pth) | +| CSPNeXt-m | 224x224 | 13.05 | 1.93 | 79.27 | 94.79 | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-m_8xb256-rsb-a1-600e_in1k-ecb3bbd9.pth) | +| CSPNeXt-l | 224x224 | 27.16 | 4.19 | 81.30 | 95.62 | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-l_8xb256-rsb-a1-600e_in1k-6a760974.pth) | +| CSPNeXt-x | 224x224 | 48.85 | 7.76 | 82.10 | 95.69 | [model](https://download.openmmlab.com/mmdetection/v3.0/rtmdet/cspnext_rsb_pretrain/cspnext-x_8xb256-rsb-a1-600e_in1k-b3f78edd.pth) | + +## Citation + +```latex +@misc{lyu2022rtmdet, + title={RTMDet: An Empirical Study of Designing Real-Time Object Detectors}, + author={Chengqi Lyu and Wenwei Zhang and Haian Huang and Yue Zhou and Yudong Wang and Yanyi Liu and Shilong Zhang and Kai Chen}, + year={2022}, + eprint={2212.07784}, + archivePrefix={arXiv}, + primaryClass={cs.CV} +} +``` + +## Visualization + +
+
+
+
+## Deployment Tutorial
+
+Here is a basic example of deploy RTMDet with [MMDeploy-1.x](https://github.com/open-mmlab/mmdeploy/tree/1.x).
+
+### Step1. Install MMDeploy
+
+Before starting the deployment, please make sure you install MMDetection and MMDeploy-1.x correctly.
+
+- Install MMDetection, please refer to the [MMDetection installation guide](https://mmdetection.readthedocs.io/en/latest/get_started.html).
+- Install MMDeploy-1.x, please refer to the [MMDeploy-1.x installation guide](https://mmdeploy.readthedocs.io/en/1.x/get_started.html#installation).
+
+If you want to deploy RTMDet with ONNXRuntime, TensorRT, or other inference engine,
+please make sure you have installed the corresponding dependencies and MMDeploy precompiled packages.
+
+### Step2. Convert Model
+
+After the installation, you can enjoy the model deployment journey starting from converting PyTorch model to backend model by running MMDeploy's `tools/deploy.py`.
+
+The detailed model conversion tutorial please refer to the [MMDeploy document](https://mmdeploy.readthedocs.io/en/1.x/02-how-to-run/convert_model.html).
+Here we only give the example of converting RTMDet.
+
+MMDeploy supports converting dynamic and static models. Dynamic models support different input shape, but the inference speed is slower than static models.
+To achieve the best performance, we suggest converting RTMDet with static setting.
+
+- If you only want to use ONNX, please use [`configs/mmdet/detection/detection_onnxruntime_static.py`](https://github.com/open-mmlab/mmdeploy/blob/1.x/configs/mmdet/detection/detection_onnxruntime_static.py) as the deployment config.
+- If you want to use TensorRT, please use [`configs/mmdet/detection/detection_tensorrt_static-640x640.py`](https://github.com/open-mmlab/mmdeploy/blob/1.x/configs/mmdet/detection/detection_tensorrt_static-640x640.py).
+
+If you want to customize the settings in the deployment config for your requirements, please refer to [MMDeploy config tutorial](https://mmdeploy.readthedocs.io/en/1.x/02-how-to-run/write_config.html).
+
+After preparing the deployment config, you can run the `tools/deploy.py` script to convert your model.
+Here we take converting RTMDet-s to TensorRT as an example:
+
+```shell
+# go to the mmdeploy folder
+cd ${PATH_TO_MMDEPLOY}
+
+# download RTMDet-s checkpoint
+wget -P checkpoint https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_s_8xb32-300e_coco/rtmdet_s_8xb32-300e_coco_20220905_161602-387a891e.pth
+
+# run the command to start model conversion
+python tools/deploy.py \
+ configs/mmdet/detection/detection_tensorrt_static-640x640.py \
+ ${PATH_TO_MMDET}/configs/rtmdet/rtmdet_s_8xb32-300e_coco.py \
+ checkpoint/rtmdet_s_8xb32-300e_coco_20220905_161602-387a891e.pth \
+ demo/resources/det.jpg \
+ --work-dir ./work_dirs/rtmdet \
+ --device cuda:0 \
+ --show
+```
+
+If the script runs successfully, you will see the following files:
+
+```
+|----work_dirs
+ |----rtmdet
+ |----end2end.onnx # ONNX model
+ |----end2end.engine # TensorRT engine file
+```
+
+After this, you can check the inference results with MMDeploy Model Converter API:
+
+```python
+from mmdeploy.apis import inference_model
+
+result = inference_model(
+ model_cfg='${PATH_TO_MMDET}/configs/rtmdet/rtmdet_s_8xb32-300e_coco.py',
+ deploy_cfg='${PATH_TO_MMDEPLOY}/configs/mmdet/detection/detection_tensorrt_static-640x640.py',
+ backend_files=['work_dirs/rtmdet/end2end.engine'],
+ img='demo/resources/det.jpg',
+ device='cuda:0')
+```
+
+#### Advanced Setting
+
+To convert the model with TRT-FP16, you can enable the fp16 mode in your deploy config:
+
+```python
+# in MMDeploy config
+backend_config = dict(
+ type='tensorrt',
+ common_config=dict(
+ fp16_mode=True # enable fp16
+ ))
+```
+
+To reduce the end to end inference speed with the inference engine, we suggest you to adjust the post-processing setting of the model.
+We set a very low score threshold during training and testing to achieve better COCO mAP.
+However, in actual usage scenarios, a relatively high score threshold (e.g. 0.3) is usually used.
+
+You can adjust the score threshold and the number of detection boxes in your model config according to the actual usage to reduce the time-consuming of post-processing.
+
+```python
+# in MMDetection config
+model = dict(
+ test_cfg=dict(
+ nms_pre=1000, # keep top-k score bboxes before nms
+ min_bbox_size=0,
+ score_thr=0.3, # score threshold to filter bboxes
+ nms=dict(type='nms', iou_threshold=0.65),
+ max_per_img=100) # only keep top-100 as the final results.
+)
+```
+
+### Step3. Inference with SDK
+
+We provide both Python and C++ inference API with MMDeploy SDK.
+
+To use SDK, you need to dump the required info during converting the model. Just add `--dump-info` to the model conversion command:
+
+```shell
+python tools/deploy.py \
+ configs/mmdet/detection/detection_tensorrt_static-640x640.py \
+ ${PATH_TO_MMDET}/configs/rtmdet/rtmdet_s_8xb32-300e_coco.py \
+ checkpoint/rtmdet_s_8xb32-300e_coco_20220905_161602-387a891e.pth \
+ demo/resources/det.jpg \
+ --work-dir ./work_dirs/rtmdet-sdk \
+ --device cuda:0 \
+ --show \
+ --dump-info # dump sdk info
+```
+
+After running the command, it will dump 3 json files additionally for the SDK:
+
+```
+|----work_dirs
+ |----rtmdet-sdk
+ |----end2end.onnx # ONNX model
+ |----end2end.engine # TensorRT engine file
+ # json files for the SDK
+ |----pipeline.json
+ |----deploy.json
+ |----detail.json
+```
+
+#### Python API
+
+Here is a basic example of SDK Python API:
+
+```python
+from mmdeploy_python import Detector
+import cv2
+
+img = cv2.imread('demo/resources/det.jpg')
+
+# create a detector
+detector = Detector(model_path='work_dirs/rtmdet-sdk', device_name='cuda', device_id=0)
+# run the inference
+bboxes, labels, _ = detector(img)
+# Filter the result according to threshold
+indices = [i for i in range(len(bboxes))]
+for index, bbox, label_id in zip(indices, bboxes, labels):
+ [left, top, right, bottom], score = bbox[0:4].astype(int), bbox[4]
+ if score < 0.3:
+ continue
+ # draw bbox
+ cv2.rectangle(img, (left, top), (right, bottom), (0, 255, 0))
+
+cv2.imwrite('output_detection.png', img)
+```
+
+#### C++ API
+
+Here is a basic example of SDK C++ API:
+
+```C++
+#include
+
+ +
+
+
+## Results and Models
+
+The results on COCO 2017 val is shown in the below table. (results on test-dev are usually slightly higher than val).
+Single-scale testing (1333x800) is adopted in all results.
+
+| Method | Backbone | Lr schd | ms-train | box AP | Config | Download |
+| :----------------: | :-------: | :-----: | :------: | :----: | :-----------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| SABL Faster R-CNN | R-50-FPN | 1x | N | 39.9 | [config](./sabl-faster-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r50_fpn_1x_coco/sabl_faster_rcnn_r50_fpn_1x_coco-e867595b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r50_fpn_1x_coco/20200830_130324.log.json) |
+| SABL Faster R-CNN | R-101-FPN | 1x | N | 41.7 | [config](./sabl-faster-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r101_fpn_1x_coco/sabl_faster_rcnn_r101_fpn_1x_coco-f804c6c1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r101_fpn_1x_coco/20200830_183949.log.json) |
+| SABL Cascade R-CNN | R-50-FPN | 1x | N | 41.6 | [config](./sabl-cascade-rcnn_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r50_fpn_1x_coco/sabl_cascade_rcnn_r50_fpn_1x_coco-e1748e5e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r50_fpn_1x_coco/20200831_033726.log.json) |
+| SABL Cascade R-CNN | R-101-FPN | 1x | N | 43.0 | [config](./sabl-cascade-rcnn_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r101_fpn_1x_coco/sabl_cascade_rcnn_r101_fpn_1x_coco-2b83e87c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r101_fpn_1x_coco/20200831_141745.log.json) |
+
+| Method | Backbone | GN | Lr schd | ms-train | box AP | Config | Download |
+| :------------: | :-------: | :-: | :-----: | :---------: | :----: | :----------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| SABL RetinaNet | R-50-FPN | N | 1x | N | 37.7 | [config](./sabl-retinanet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_1x_coco/sabl_retinanet_r50_fpn_1x_coco-6c54fd4f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_1x_coco/20200830_053451.log.json) |
+| SABL RetinaNet | R-50-FPN | Y | 1x | N | 38.8 | [config](./sabl-retinanet_r50-gn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_gn_1x_coco/sabl_retinanet_r50_fpn_gn_1x_coco-e16dfcf1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_gn_1x_coco/20200831_141955.log.json) |
+| SABL RetinaNet | R-101-FPN | N | 1x | N | 39.7 | [config](./sabl-retinanet_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_1x_coco/sabl_retinanet_r101_fpn_1x_coco-42026904.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_1x_coco/20200831_034256.log.json) |
+| SABL RetinaNet | R-101-FPN | Y | 1x | N | 40.5 | [config](./sabl-retinanet_r101-gn_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_1x_coco/sabl_retinanet_r101_fpn_gn_1x_coco-40a893e8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_1x_coco/20200830_201422.log.json) |
+| SABL RetinaNet | R-101-FPN | Y | 2x | Y (640~800) | 42.9 | [config](./sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_640_800_coco/sabl_retinanet_r101_fpn_gn_2x_ms_640_800_coco-1e63382c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_640_800_coco/20200830_144807.log.json) |
+| SABL RetinaNet | R-101-FPN | Y | 2x | Y (480~960) | 43.6 | [config](./sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_480_960_coco/sabl_retinanet_r101_fpn_gn_2x_ms_480_960_coco-5342f857.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_480_960_coco/20200830_164537.log.json) |
+
+## Citation
+
+We provide config files to reproduce the object detection results in the ECCV 2020 Spotlight paper for [Side-Aware Boundary Localization for More Precise Object Detection](https://arxiv.org/abs/1912.04260).
+
+```latex
+@inproceedings{Wang_2020_ECCV,
+ title = {Side-Aware Boundary Localization for More Precise Object Detection},
+ author = {Jiaqi Wang and Wenwei Zhang and Yuhang Cao and Kai Chen and Jiangmiao Pang and Tao Gong and Jianping Shi and Chen Change Loy and Dahua Lin},
+ booktitle = {ECCV},
+ year = {2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/sabl/metafile.yml b/grounding-dino/mmdetection/configs/sabl/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..632b869cc4bec559d442410b1d3a4f18d74556ed
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/metafile.yml
@@ -0,0 +1,140 @@
+Collections:
+ - Name: SABL
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ - SABL
+ Paper:
+ URL: https://arxiv.org/abs/1912.04260
+ Title: 'Side-Aware Boundary Localization for More Precise Object Detection'
+ README: configs/sabl/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.4.0/mmdet/models/roi_heads/bbox_heads/sabl_head.py#L14
+ Version: v2.4.0
+
+Models:
+ - Name: sabl-faster-rcnn_r50_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-faster-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r50_fpn_1x_coco/sabl_faster_rcnn_r50_fpn_1x_coco-e867595b.pth
+
+ - Name: sabl-faster-rcnn_r101_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-faster-rcnn_r101_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_faster_rcnn_r101_fpn_1x_coco/sabl_faster_rcnn_r101_fpn_1x_coco-f804c6c1.pth
+
+ - Name: sabl-cascade-rcnn_r50_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-cascade-rcnn_r50_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r50_fpn_1x_coco/sabl_cascade_rcnn_r50_fpn_1x_coco-e1748e5e.pth
+
+ - Name: sabl-cascade-rcnn_r101_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-cascade-rcnn_r101_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_cascade_rcnn_r101_fpn_1x_coco/sabl_cascade_rcnn_r101_fpn_1x_coco-2b83e87c.pth
+
+ - Name: sabl-retinanet_r50_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r50_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_1x_coco/sabl_retinanet_r50_fpn_1x_coco-6c54fd4f.pth
+
+ - Name: sabl-retinanet_r50-gn_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r50-gn_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 38.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r50_fpn_gn_1x_coco/sabl_retinanet_r50_fpn_gn_1x_coco-e16dfcf1.pth
+
+ - Name: sabl-retinanet_r101_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r101_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 39.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_1x_coco/sabl_retinanet_r101_fpn_1x_coco-42026904.pth
+
+ - Name: sabl-retinanet_r101-gn_fpn_1x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r101-gn_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_1x_coco/sabl_retinanet_r101_fpn_gn_1x_coco-40a893e8.pth
+
+ - Name: sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 42.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_640_800_coco/sabl_retinanet_r101_fpn_gn_2x_ms_640_800_coco-1e63382c.pth
+
+ - Name: sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco
+ In Collection: SABL
+ Config: configs/sabl/sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/sabl/sabl_retinanet_r101_fpn_gn_2x_ms_480_960_coco/sabl_retinanet_r101_fpn_gn_2x_ms_480_960_coco-5342f857.pth
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..404e7fcb2ac52773c9bc74f411e66584114f378e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,90 @@
+_base_ = [
+ '../_base_/models/cascade-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ roi_head=dict(bbox_head=[
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.7),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0)),
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.5),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0)),
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.3),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1, loss_weight=1.0))
+ ]))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..69c59ca20d6c16e458292a55b8e4258a3d9a06bb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-cascade-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,86 @@
+_base_ = [
+ '../_base_/models/cascade-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ roi_head=dict(bbox_head=[
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.7),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0)),
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.5),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0)),
+ dict(
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.3),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1, loss_weight=1.0))
+ ]))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d1bf8b9c8cf1ac62d351456e7b19f75259ec0625
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r101_fpn_1x_coco.py
@@ -0,0 +1,38 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ roi_head=dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.7),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0))))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a727bd6d3da09c86908c3c584509c5313cf732b5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-faster-rcnn_r50_fpn_1x_coco.py
@@ -0,0 +1,34 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLHead',
+ num_classes=80,
+ cls_in_channels=256,
+ reg_in_channels=256,
+ roi_feat_size=7,
+ reg_feat_up_ratio=2,
+ reg_pre_kernel=3,
+ reg_post_kernel=3,
+ reg_pre_num=2,
+ reg_post_num=1,
+ cls_out_channels=1024,
+ reg_offset_out_channels=256,
+ reg_cls_out_channels=256,
+ num_cls_fcs=1,
+ num_reg_fcs=0,
+ reg_class_agnostic=True,
+ norm_cfg=None,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=1.7),
+ loss_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
+ loss_bbox_reg=dict(type='SmoothL1Loss', beta=0.1,
+ loss_weight=1.0))))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f181ad6813e4c6e3729ff80b3b8d915d84b53bf2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_1x_coco.py
@@ -0,0 +1,57 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ norm_cfg=norm_cfg,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..dc7209aebad3efcb88945460cf20b36e6ec4b419
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-480-960-2x_coco.py
@@ -0,0 +1,68 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+# model settings
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ norm_cfg=norm_cfg,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 960)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ac5f6d9811dc8e45cfc036b3a3d4a04e7fa5ee60
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101-gn_fpn_ms-640-800-2x_coco.py
@@ -0,0 +1,68 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+# model settings
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ norm_cfg=norm_cfg,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..409695b5dbccfe20bb6e85ee16231211c2ebcdba
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r101_fpn_1x_coco.py
@@ -0,0 +1,55 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50-gn_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50-gn_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4facdb6aaab05fd04b95e8c3ba2f0460090b1d6c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50-gn_fpn_1x_coco.py
@@ -0,0 +1,53 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ norm_cfg=norm_cfg,
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9073d6f002fcb49aecc280f318b8769b477d2d82
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sabl/sabl-retinanet_r50_fpn_1x_coco.py
@@ -0,0 +1,51 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ bbox_head=dict(
+ _delete_=True,
+ type='SABLRetinaHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ approx_anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=4,
+ scales_per_octave=3,
+ ratios=[0.5, 1.0, 2.0],
+ strides=[8, 16, 32, 64, 128]),
+ square_anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[4],
+ strides=[8, 16, 32, 64, 128]),
+ bbox_coder=dict(
+ type='BucketingBBoxCoder', num_buckets=14, scale_factor=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox_cls=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.5),
+ loss_bbox_reg=dict(
+ type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.5)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='ApproxMaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.0,
+ ignore_iof_thr=-1),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/scnet/README.md b/grounding-dino/mmdetection/configs/scnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..08dbfa87f5625ba6500c731910c178a5e2684e0f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/README.md
@@ -0,0 +1,63 @@
+# SCNet
+
+> [SCNet: Training Inference Sample Consistency for Instance Segmentation](https://arxiv.org/abs/2012.10150)
+
+
+
+## Abstract
+
+
+
+Cascaded architectures have brought significant performance improvement in object detection and instance segmentation. However, there are lingering issues regarding the disparity in the Intersection-over-Union (IoU) distribution of the samples between training and inference. This disparity can potentially exacerbate detection accuracy. This paper proposes an architecture referred to as Sample Consistency Network (SCNet) to ensure that the IoU distribution of the samples at training time is close to that at inference time. Furthermore, SCNet incorporates feature relay and utilizes global contextual information to further reinforce the reciprocal relationships among classifying, detecting, and segmenting sub-tasks. Extensive experiments on the standard COCO dataset reveal the effectiveness of the proposed method over multiple evaluation metrics, including box AP, mask AP, and inference speed. In particular, while running 38% faster, the proposed SCNet improves the AP of the box and mask predictions by respectively 1.3 and 2.3 points compared to the strong Cascade Mask R-CNN baseline.
+
+
+
+ +
+
+
+## Dataset
+
+SCNet requires COCO and [COCO-stuff](http://calvin.inf.ed.ac.uk/wp-content/uploads/data/cocostuffdataset/stuffthingmaps_trainval2017.zip) dataset for training. You need to download and extract it in the COCO dataset path.
+The directory should be like this.
+
+```none
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── coco
+│ │ ├── annotations
+│ │ ├── train2017
+│ │ ├── val2017
+│ │ ├── test2017
+| | ├── stuffthingmaps
+```
+
+## Results and Models
+
+The results on COCO 2017val are shown in the below table. (results on test-dev are usually slightly higher than val)
+
+| Backbone | Style | Lr schd | Mem (GB) | Inf speed (fps) | box AP | mask AP | TTA box AP | TTA mask AP | Config | Download |
+| :-------------: | :-----: | :-----: | :------: | :-------------: | :----: | :-----: | :--------: | :---------: | :------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-FPN | pytorch | 1x | 7.0 | 6.2 | 43.5 | 39.2 | 44.8 | 40.9 | [config](./scnet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_1x_coco/scnet_r50_fpn_1x_coco-c3f09857.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_1x_coco/scnet_r50_fpn_1x_coco_20210117_192725.log.json) |
+| R-50-FPN | pytorch | 20e | 7.0 | 6.2 | 44.5 | 40.0 | 45.8 | 41.5 | [config](./scnet_r50_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_20e_coco/scnet_r50_fpn_20e_coco-a569f645.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_20e_coco/scnet_r50_fpn_20e_coco_20210116_060148.log.json) |
+| R-101-FPN | pytorch | 20e | 8.9 | 5.8 | 45.8 | 40.9 | 47.3 | 42.7 | [config](./scnet_r101_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r101_fpn_20e_coco/scnet_r101_fpn_20e_coco-294e312c.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r101_fpn_20e_coco/scnet_r101_fpn_20e_coco_20210118_175824.log.json) |
+| X-101-64x4d-FPN | pytorch | 20e | 13.2 | 4.9 | 47.5 | 42.3 | 48.9 | 44.0 | [config](./scnet_x101-64x4d_fpn_20e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_x101_64x4d_fpn_20e_coco/scnet_x101_64x4d_fpn_20e_coco-fb09dec9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_x101_64x4d_fpn_20e_coco/scnet_x101_64x4d_fpn_20e_coco_20210120_045959.log.json) |
+
+### Notes
+
+- Training hyper-parameters are identical to those of [HTC](https://github.com/open-mmlab/mmdetection/tree/main/configs/htc).
+- TTA means Test Time Augmentation, which applies horizontal flip and multi-scale testing. Refer to [config](./scnet_r50_fpn_1x_coco.py).
+
+## Citation
+
+We provide the code for reproducing experiment results of [SCNet](https://arxiv.org/abs/2012.10150).
+
+```latex
+@inproceedings{vu2019cascade,
+ title={SCNet: Training Inference Sample Consistency for Instance Segmentation},
+ author={Vu, Thang and Haeyong, Kang and Yoo, Chang D},
+ booktitle={AAAI},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/scnet/metafile.yml b/grounding-dino/mmdetection/configs/scnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..936d38960a8f423198702194f64a9eb46c770979
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/metafile.yml
@@ -0,0 +1,116 @@
+Collections:
+ - Name: SCNet
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ - SCNet
+ Paper:
+ URL: https://arxiv.org/abs/2012.10150
+ Title: 'SCNet: Training Inference Sample Consistency for Instance Segmentation'
+ README: configs/scnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.9.0/mmdet/models/detectors/scnet.py#L6
+ Version: v2.9.0
+
+Models:
+ - Name: scnet_r50_fpn_1x_coco
+ In Collection: SCNet
+ Config: configs/scnet/scnet_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 161.29
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_1x_coco/scnet_r50_fpn_1x_coco-c3f09857.pth
+
+ - Name: scnet_r50_fpn_20e_coco
+ In Collection: SCNet
+ Config: configs/scnet/scnet_r50_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 7.0
+ inference time (ms/im):
+ - value: 161.29
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r50_fpn_20e_coco/scnet_r50_fpn_20e_coco-a569f645.pth
+
+ - Name: scnet_r101_fpn_20e_coco
+ In Collection: SCNet
+ Config: configs/scnet/scnet_r101_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 8.9
+ inference time (ms/im):
+ - value: 172.41
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_r101_fpn_20e_coco/scnet_r101_fpn_20e_coco-294e312c.pth
+
+ - Name: scnet_x101-64x4d_fpn_20e_coco
+ In Collection: SCNet
+ Config: configs/scnet/scnet_x101-64x4d_fpn_20e_coco.py
+ Metadata:
+ Training Memory (GB): 13.2
+ inference time (ms/im):
+ - value: 204.08
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (800, 1333)
+ Epochs: 20
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 47.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scnet/scnet_x101_64x4d_fpn_20e_coco/scnet_x101_64x4d_fpn_20e_coco-fb09dec9.pth
diff --git a/grounding-dino/mmdetection/configs/scnet/scnet_r101_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/scnet/scnet_r101_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ebba52978b23c07a68e3563033c860a95dd515b6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/scnet_r101_fpn_20e_coco.py
@@ -0,0 +1,6 @@
+_base_ = './scnet_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a0210fdb456c26b2c05d99a2435da14fc30f088d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_1x_coco.py
@@ -0,0 +1,138 @@
+_base_ = '../htc/htc_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ type='SCNet',
+ roi_head=dict(
+ _delete_=True,
+ type='SCNetRoIHead',
+ num_stages=3,
+ stage_loss_weights=[1, 0.5, 0.25],
+ bbox_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ bbox_head=[
+ dict(
+ type='SCNetBBoxHead',
+ num_shared_fcs=2,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='SCNetBBoxHead',
+ num_shared_fcs=2,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='SCNetBBoxHead',
+ num_shared_fcs=2,
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=80,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[4, 8, 16, 32]),
+ mask_head=dict(
+ type='SCNetMaskHead',
+ num_convs=12,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ conv_to_res=True,
+ loss_mask=dict(
+ type='CrossEntropyLoss', use_mask=True, loss_weight=1.0)),
+ semantic_roi_extractor=dict(
+ type='SingleRoIExtractor',
+ roi_layer=dict(type='RoIAlign', output_size=14, sampling_ratio=0),
+ out_channels=256,
+ featmap_strides=[8]),
+ semantic_head=dict(
+ type='SCNetSemanticHead',
+ num_ins=5,
+ fusion_level=1,
+ seg_scale_factor=1 / 8,
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=183,
+ loss_seg=dict(
+ type='CrossEntropyLoss', ignore_index=255, loss_weight=0.2),
+ conv_to_res=True),
+ glbctx_head=dict(
+ type='GlobalContextHead',
+ num_convs=4,
+ in_channels=256,
+ conv_out_channels=256,
+ num_classes=80,
+ loss_weight=3.0,
+ conv_to_res=True),
+ feat_relay_head=dict(
+ type='FeatureRelayHead',
+ in_channels=1024,
+ out_conv_channels=256,
+ roi_feat_size=7,
+ scale_factor=2)))
+
+# TODO
+# uncomment below code to enable test time augmentations
+# img_norm_cfg = dict(
+# mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
+# test_pipeline = [
+# dict(type='LoadImageFromFile'),
+# dict(
+# type='MultiScaleFlipAug',
+# img_scale=[(600, 900), (800, 1200), (1000, 1500), (1200, 1800),
+# (1400, 2100)],
+# flip=True,
+# transforms=[
+# dict(type='Resize', keep_ratio=True),
+# dict(type='RandomFlip', flip_ratio=0.5),
+# dict(type='Normalize', **img_norm_cfg),
+# dict(type='Pad', size_divisor=32),
+# dict(type='ImageToTensor', keys=['img']),
+# dict(type='Collect', keys=['img']),
+# ])
+# ]
+# data = dict(
+# val=dict(pipeline=test_pipeline),
+# test=dict(pipeline=test_pipeline))
diff --git a/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..533e1b5f3253387788fbf1a9d6d7a38c7c5c5f30
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/scnet_r50_fpn_20e_coco.py
@@ -0,0 +1,15 @@
+_base_ = './scnet_r50_fpn_1x_coco.py'
+# learning policy
+max_epochs = 20
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 19],
+ gamma=0.1)
+]
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_20e_coco.py b/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..1e54b030fa68f76f22edf66e3594d66a13c2c672
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_20e_coco.py
@@ -0,0 +1,15 @@
+_base_ = './scnet_r50_fpn_20e_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_8xb1-20e_coco.py b/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_8xb1-20e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3cdce7d54248e77e98639d68490cc30dfd625c87
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scnet/scnet_x101-64x4d_fpn_8xb1-20e_coco.py
@@ -0,0 +1,8 @@
+_base_ = './scnet_x101-64x4d_fpn_20e_coco.py'
+train_dataloader = dict(batch_size=1, num_workers=1)
+
+optim_wrapper = dict(optimizer=dict(lr=0.01))
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (1 samples per GPU)
+auto_scale_lr = dict(base_batch_size=8)
diff --git a/grounding-dino/mmdetection/configs/scratch/README.md b/grounding-dino/mmdetection/configs/scratch/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..7bdd8ff9f20a0b222a37eebfb44311150c130b15
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scratch/README.md
@@ -0,0 +1,35 @@
+# Scratch
+
+> [Rethinking ImageNet Pre-training](https://arxiv.org/abs/1811.08883)
+
+
+
+## Abstract
+
+We report competitive results on object detection and instance segmentation on the COCO dataset using standard models trained from random initialization. The results are no worse than their ImageNet pre-training counterparts even when using the hyper-parameters of the baseline system (Mask R-CNN) that were optimized for fine-tuning pre-trained models, with the sole exception of increasing the number of training iterations so the randomly initialized models may converge. Training from random initialization is surprisingly robust; our results hold even when: (i) using only 10% of the training data, (ii) for deeper and wider models, and (iii) for multiple tasks and metrics. Experiments show that ImageNet pre-training speeds up convergence early in training, but does not necessarily provide regularization or improve final target task accuracy. To push the envelope we demonstrate 50.9 AP on COCO object detection without using any external data---a result on par with the top COCO 2017 competition results that used ImageNet pre-training. These observations challenge the conventional wisdom of ImageNet pre-training for dependent tasks and we expect these discoveries will encourage people to rethink the current de facto paradigm of \`pre-training and fine-tuning' in computer vision.
+
+
+
+ +
+
+
+## Results and Models
+
+| Model | Backbone | Style | Lr schd | box AP | mask AP | Config | Download |
+| :----------: | :------: | :-----: | :-----: | :----: | :-----: | :-------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Faster R-CNN | R-50-FPN | pytorch | 6x | 40.7 | | [config](./faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scratch/faster_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_faster_rcnn_r50_fpn_gn_6x_bbox_mAP-0.407_20200201_193013-90813d01.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scratch/faster_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_faster_rcnn_r50_fpn_gn_6x_20200201_193013.log.json) |
+| Mask R-CNN | R-50-FPN | pytorch | 6x | 41.2 | 37.4 | [config](./mask-rcnn_r50-scratch_fpn_gn-all_6x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/scratch/mask_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_mask_rcnn_r50_fpn_gn_6x_bbox_mAP-0.412__segm_mAP-0.374_20200201_193051-1e190a40.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/scratch/mask_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_mask_rcnn_r50_fpn_gn_6x_20200201_193051.log.json) |
+
+Note:
+
+- The above models are trained with 16 GPUs.
+
+## Citation
+
+```latex
+@article{he2018rethinking,
+ title={Rethinking imagenet pre-training},
+ author={He, Kaiming and Girshick, Ross and Doll{\'a}r, Piotr},
+ journal={arXiv preprint arXiv:1811.08883},
+ year={2018}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/scratch/faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py b/grounding-dino/mmdetection/configs/scratch/faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6e632b9a150871a44b698dfdb0fdc3f07308ef81
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scratch/faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
@@ -0,0 +1,39 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ frozen_stages=-1,
+ zero_init_residual=False,
+ norm_cfg=norm_cfg,
+ init_cfg=None),
+ neck=dict(norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg)))
+
+optim_wrapper = dict(paramwise_cfg=dict(norm_decay_mult=0.))
+
+max_epochs = 73
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[65, 71],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
+
+# only keep latest 3 checkpoints
+default_hooks = dict(checkpoint=dict(max_keep_ckpts=3))
diff --git a/grounding-dino/mmdetection/configs/scratch/mask-rcnn_r50-scratch_fpn_gn-all_6x_coco.py b/grounding-dino/mmdetection/configs/scratch/mask-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9796f504b677a841919bb058ded414de25e74a50
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scratch/mask-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
@@ -0,0 +1,40 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+norm_cfg = dict(type='GN', num_groups=32, requires_grad=True)
+model = dict(
+ backbone=dict(
+ frozen_stages=-1,
+ zero_init_residual=False,
+ norm_cfg=norm_cfg,
+ init_cfg=None),
+ neck=dict(norm_cfg=norm_cfg),
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=norm_cfg),
+ mask_head=dict(norm_cfg=norm_cfg)))
+
+optim_wrapper = dict(paramwise_cfg=dict(norm_decay_mult=0.))
+
+max_epochs = 73
+
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[65, 71],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
+
+# only keep latest 3 checkpoints
+default_hooks = dict(checkpoint=dict(max_keep_ckpts=3))
diff --git a/grounding-dino/mmdetection/configs/scratch/metafile.yml b/grounding-dino/mmdetection/configs/scratch/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..977b8e5bfc2b6319793ae8abdeb71e5e04d7cb1b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/scratch/metafile.yml
@@ -0,0 +1,48 @@
+Collections:
+ - Name: Rethinking ImageNet Pre-training
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - RPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1811.08883
+ Title: 'Rethinking ImageNet Pre-training'
+ README: configs/scratch/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.0.0/configs/scratch/faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
+ Version: v2.0.0
+
+Models:
+ - Name: faster-rcnn_r50_fpn_gn-all_scratch_6x_coco
+ In Collection: Rethinking ImageNet Pre-training
+ Config: configs/scratch/faster-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
+ Metadata:
+ Epochs: 72
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scratch/faster_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_faster_rcnn_r50_fpn_gn_6x_bbox_mAP-0.407_20200201_193013-90813d01.pth
+
+ - Name: mask-rcnn_r50_fpn_gn-all_scratch_6x_coco
+ In Collection: Rethinking ImageNet Pre-training
+ Config: configs/scratch/mask-rcnn_r50-scratch_fpn_gn-all_6x_coco.py
+ Metadata:
+ Epochs: 72
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.2
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/scratch/mask_rcnn_r50_fpn_gn-all_scratch_6x_coco/scratch_mask_rcnn_r50_fpn_gn_6x_bbox_mAP-0.412__segm_mAP-0.374_20200201_193051-1e190a40.pth
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/README.md b/grounding-dino/mmdetection/configs/seesaw_loss/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..7077d75351caf0ca21760939eb0e2cea2fee5f85
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/README.md
@@ -0,0 +1,47 @@
+# Seesaw Loss
+
+> [Seesaw Loss for Long-Tailed Instance Segmentation](https://arxiv.org/abs/2008.10032)
+
+
+
+## Abstract
+
+Instance segmentation has witnessed a remarkable progress on class-balanced benchmarks. However, they fail to perform as accurately in real-world scenarios, where the category distribution of objects naturally comes with a long tail. Instances of head classes dominate a long-tailed dataset and they serve as negative samples of tail categories. The overwhelming gradients of negative samples on tail classes lead to a biased learning process for classifiers. Consequently, objects of tail categories are more likely to be misclassified as backgrounds or head categories. To tackle this problem, we propose Seesaw Loss to dynamically re-balance gradients of positive and negative samples for each category, with two complementary factors, i.e., mitigation factor and compensation factor. The mitigation factor reduces punishments to tail categories w.r.t. the ratio of cumulative training instances between different categories. Meanwhile, the compensation factor increases the penalty of misclassified instances to avoid false positives of tail categories. We conduct extensive experiments on Seesaw Loss with mainstream frameworks and different data sampling strategies. With a simple end-to-end training pipeline, Seesaw Loss obtains significant gains over Cross-Entropy Loss, and achieves state-of-the-art performance on LVIS dataset without bells and whistles.
+
+
+
+ +
+
+
+- Please setup [LVIS dataset](../lvis/README.md) for MMDetection.
+
+- RFS indicates to use oversample strategy [here](../../docs/tutorials/customipredataset.md#class-balanced-dataset) with oversample threshold `1e-3`.
+
+## Results and models of Seasaw Loss on LVIS v1 dataset
+
+| Method | Backbone | Style | Lr schd | Data Sampler | Norm Mask | box AP | mask AP | Config | Download |
+| :----------------: | :-------: | :-----: | :-----: | :----------: | :-------: | :----: | :-----: | :----------------------------------------------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Mask R-CNN | R-50-FPN | pytorch | 2x | random | N | 25.6 | 25.0 | [config](./mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-a698dd3d.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-50-FPN | pytorch | 2x | random | Y | 25.6 | 25.4 | [config](./mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-a1c11314.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-101-FPN | pytorch | 2x | random | N | 27.4 | 26.7 | [config](./mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-8e6e6dd5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-101-FPN | pytorch | 2x | random | Y | 27.2 | 27.3 | [config](./mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-a0b59c42.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-50-FPN | pytorch | 2x | RFS | N | 27.6 | 26.4 | [config](./mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-392a804b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-50-FPN | pytorch | 2x | RFS | Y | 27.6 | 26.8 | [config](./mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-cd0f6a12.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-101-FPN | pytorch | 2x | RFS | N | 28.9 | 27.6 | [config](./mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-e68eb464.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Mask R-CNN | R-101-FPN | pytorch | 2x | RFS | Y | 28.9 | 28.2 | [config](./mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-1d817139.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+| Cascade Mask R-CNN | R-101-FPN | pytorch | 2x | random | N | 33.1 | 29.2 | [config](./cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-71e2215e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Cascade Mask R-CNN | R-101-FPN | pytorch | 2x | random | Y | 33.0 | 30.0 | [config](./cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-8b5a6745.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+| Cascade Mask R-CNN | R-101-FPN | pytorch | 2x | RFS | N | 30.0 | 29.3 | [config](./cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-5d8ca2a4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1.log.json) |
+| Cascade Mask R-CNN | R-101-FPN | pytorch | 2x | RFS | Y | 32.8 | 30.1 | [config](./cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-c8551505.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1.log.json) |
+
+## Citation
+
+We provide config files to reproduce the instance segmentation performance in the CVPR 2021 paper for [Seesaw Loss for Long-Tailed Instance Segmentation](https://arxiv.org/abs/2008.10032).
+
+```latex
+@inproceedings{wang2021seesaw,
+ title={Seesaw Loss for Long-Tailed Instance Segmentation},
+ author={Jiaqi Wang and Wenwei Zhang and Yuhang Zang and Yuhang Cao and Jiangmiao Pang and Tao Gong and Kai Chen and Ziwei Liu and Chen Change Loy and Dahua Lin},
+ booktitle={Proceedings of the {IEEE} Conference on Computer Vision and Pattern Recognition},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..2de87dcca59ccac7fc96c10c2a069fcf0464aeff
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
@@ -0,0 +1,5 @@
+_base_ = './cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py' # noqa: E501
+model = dict(
+ roi_head=dict(
+ mask_head=dict(
+ predictor_cfg=dict(type='NormedConv2d', tempearture=20))))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..4d67ad7d4817a32b365bc2567937f69b68a9c97c
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,5 @@
+_base_ = './cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py' # noqa: E501
+model = dict(
+ roi_head=dict(
+ mask_head=dict(
+ predictor_cfg=dict(type='NormedConv2d', tempearture=20))))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..2a1a87d4203a12a78a26fd873bd6017fafb49cdf
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
@@ -0,0 +1,116 @@
+_base_ = [
+ '../_base_/models/cascade-mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ roi_head=dict(
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_head=dict(num_classes=1203)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/lvis_v1/'
+train_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_val.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='LVISMetric',
+ ann_file=data_root + 'annotations/lvis_v1_val.json',
+ metric=['bbox', 'segm'])
+test_evaluator = val_evaluator
+
+train_cfg = dict(val_interval=24)
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..0e7b4df91368d23092a68f16ba4a35660ea23130
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,95 @@
+_base_ = [
+ '../_base_/models/cascade-mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/lvis_v1_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')),
+ roi_head=dict(
+ bbox_head=[
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.05, 0.05, 0.1, 0.1]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
+ loss_weight=1.0)),
+ dict(
+ type='Shared2FCBBoxHead',
+ in_channels=256,
+ fc_out_channels=1024,
+ roi_feat_size=7,
+ num_classes=1203,
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[0., 0., 0., 0.],
+ target_stds=[0.033, 0.033, 0.067, 0.067]),
+ reg_class_agnostic=True,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
+ ],
+ mask_head=dict(num_classes=1203)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(dataset=dict(pipeline=train_pipeline)))
+
+train_cfg = dict(val_interval=24)
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..b518c2135acb39a3d1119a8892c72816910ca496
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py' # noqa: E501
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..008bbcae6eb8d189bdd0688b42d663eeba2a661e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py' # noqa: E501
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..8a0b6755bf6f218c337d9ee16677e3e64886c019
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..6143231918e028523b6bb1792887ef7ce16dde02
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,6 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..06d2438cf7c351a2fb352f787bc434cc6afc3ebb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
@@ -0,0 +1,5 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py'
+model = dict(
+ roi_head=dict(
+ mask_head=dict(
+ predictor_cfg=dict(type='NormedConv2d', tempearture=20))))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..5fc68d3df32015e0fc8d5dd2bc92df416a8fc5fd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,5 @@
+_base_ = './mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py'
+model = dict(
+ roi_head=dict(
+ mask_head=dict(
+ predictor_cfg=dict(type='NormedConv2d', tempearture=20))))
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..25c646c9c75c4468e71442049876a77382528e02
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
@@ -0,0 +1,59 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ num_classes=1203,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0)),
+ mask_head=dict(num_classes=1203)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+dataset_type = 'LVISV1Dataset'
+data_root = 'data/lvis_v1/'
+train_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_train.json',
+ data_prefix=dict(img=''),
+ pipeline=train_pipeline))
+val_dataloader = dict(
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/lvis_v1_val.json',
+ data_prefix=dict(img='')))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='LVISMetric',
+ ann_file=data_root + 'annotations/lvis_v1_val.json',
+ metric=['bbox', 'segm'])
+test_evaluator = val_evaluator
+
+train_cfg = dict(val_interval=24)
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
new file mode 100644
index 0000000000000000000000000000000000000000..d60320e0b78035d24adb86f3aa184433951481fe
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
@@ -0,0 +1,38 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/lvis_v1_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ roi_head=dict(
+ bbox_head=dict(
+ num_classes=1203,
+ cls_predictor_cfg=dict(type='NormedLinear', tempearture=20),
+ loss_cls=dict(
+ type='SeesawLoss',
+ p=0.8,
+ q=2.0,
+ num_classes=1203,
+ loss_weight=1.0)),
+ mask_head=dict(num_classes=1203)),
+ test_cfg=dict(
+ rcnn=dict(
+ score_thr=0.0001,
+ # LVIS allows up to 300
+ max_per_img=300)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 640), (1333, 672), (1333, 704), (1333, 736),
+ (1333, 768), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(dataset=dict(pipeline=train_pipeline)))
+
+train_cfg = dict(val_interval=24)
diff --git a/grounding-dino/mmdetection/configs/seesaw_loss/metafile.yml b/grounding-dino/mmdetection/configs/seesaw_loss/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..374b9cde64ab1ff3c5f23971467846804738b0aa
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/seesaw_loss/metafile.yml
@@ -0,0 +1,203 @@
+Collections:
+ - Name: Seesaw Loss
+ Metadata:
+ Training Data: LVIS
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Softmax
+ - RPN
+ - Convolution
+ - Dense Connections
+ - FPN
+ - ResNet
+ - RoIAlign
+ - Seesaw Loss
+ Paper:
+ URL: https://arxiv.org/abs/2008.10032
+ Title: 'Seesaw Loss for Long-Tailed Instance Segmentation'
+ README: configs/seesaw_loss/README.md
+
+Models:
+ - Name: mask-rcnn_r50_fpn_random_seesaw_loss_mstrain_2x_lvis_v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 25.6
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 25.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-a698dd3d.pth
+ - Name: mask-rcnn_r50_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 25.6
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 25.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-a1c11314.pth
+ - Name: mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 27.4
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 26.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-8e6e6dd5.pth
+ - Name: mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 27.2
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 27.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-a0b59c42.pth
+ - Name: mask-rcnn_r50_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 27.6
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 26.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-392a804b.pth
+ - Name: mask-rcnn_r50_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r50_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 27.6
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 26.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r50_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-cd0f6a12.pth
+ - Name: mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 28.9
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 27.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-e68eb464.pth
+ - Name: mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 28.9
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 28.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-1d817139.pth
+ - Name: cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 33.1
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 29.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_mstrain_2x_lvis_v1-71e2215e.pth
+ - Name: cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_random-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 33.0
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 30.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_random_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-8b5a6745.pth
+ - Name: cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 30.0
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 29.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_mstrain_2x_lvis_v1-5d8ca2a4.pth
+ - Name: cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1
+ In Collection: Seesaw Loss
+ Config: configs/seesaw_loss/cascade-mask-rcnn_r101_fpn_seesaw-loss-normed-mask_sample1e-3-ms-2x_lvis-v1.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: LVIS v1
+ Metrics:
+ box AP: 32.8
+ - Task: Instance Segmentation
+ Dataset: LVIS v1
+ Metrics:
+ mask AP: 30.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/seesaw_loss/cascade_mask_rcnn_r101_fpn_sample1e-3_seesaw_loss_normed_mask_mstrain_2x_lvis_v1-c8551505.pth
diff --git a/grounding-dino/mmdetection/configs/selfsup_pretrain/README.md b/grounding-dino/mmdetection/configs/selfsup_pretrain/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..57537dddaca80756b7a6fc582808907edc8d850a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/selfsup_pretrain/README.md
@@ -0,0 +1,109 @@
+# Backbones Trained by Self-Supervise Algorithms
+
+
+
+## Abstract
+
+Unsupervised image representations have significantly reduced the gap with supervised pretraining, notably with the recent achievements of contrastive learning methods. These contrastive methods typically work online and rely on a large number of explicit pairwise feature comparisons, which is computationally challenging. In this paper, we propose an online algorithm, SwAV, that takes advantage of contrastive methods without requiring to compute pairwise comparisons. Specifically, our method simultaneously clusters the data while enforcing consistency between cluster assignments produced for different augmentations (or views) of the same image, instead of comparing features directly as in contrastive learning. Simply put, we use a swapped prediction mechanism where we predict the cluster assignment of a view from the representation of another view. Our method can be trained with large and small batches and can scale to unlimited amounts of data. Compared to previous contrastive methods, our method is more memory efficient since it does not require a large memory bank or a special momentum network. In addition, we also propose a new data augmentation strategy, multi-crop, that uses a mix of views with different resolutions in place of two full-resolution views, without increasing the memory or compute requirements much. We validate our findings by achieving 75.3% top-1 accuracy on ImageNet with ResNet-50, as well as surpassing supervised pretraining on all the considered transfer tasks.
+
+
+
+ +
+
+
+We present Momentum Contrast (MoCo) for unsupervised visual representation learning. From a perspective on contrastive learning as dictionary look-up, we build a dynamic dictionary with a queue and a moving-averaged encoder. This enables building a large and consistent dictionary on-the-fly that facilitates contrastive unsupervised learning. MoCo provides competitive results under the common linear protocol on ImageNet classification. More importantly, the representations learned by MoCo transfer well to downstream tasks. MoCo can outperform its supervised pre-training counterpart in 7 detection/segmentation tasks on PASCAL VOC, COCO, and other datasets, sometimes surpassing it by large margins. This suggests that the gap between unsupervised and supervised representation learning has been largely closed in many vision tasks.
+
+
+
+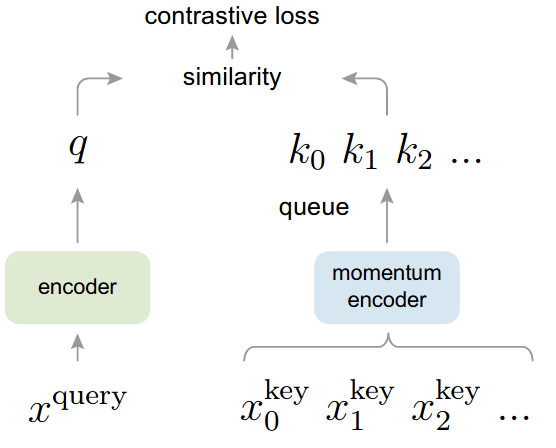 +
+
+
+## Usage
+
+To use a self-supervisely pretrained backbone, there are two steps to do:
+
+1. Download and convert the model to PyTorch-style supported by MMDetection
+2. Modify the config and change the training setting accordingly
+
+### Convert model
+
+For more general usage, we also provide script `selfsup2mmdet.py` in the tools directory to convert the key of models pretrained by different self-supervised methods to PyTorch-style checkpoints used in MMDetection.
+
+```bash
+python -u tools/model_converters/selfsup2mmdet.py ${PRETRAIN_PATH} ${STORE_PATH} --selfsup ${method}
+```
+
+This script convert model from `PRETRAIN_PATH` and store the converted model in `STORE_PATH`.
+
+For example, to use a ResNet-50 backbone released by MoCo, you can download it from [here](https://dl.fbaipublicfiles.com/moco/moco_checkpoints/moco_v2_800ep/moco_v2_800ep_pretrain.pth.tar) and use the following command
+
+```bash
+python -u tools/model_converters/selfsup2mmdet.py ./moco_v2_800ep_pretrain.pth.tar mocov2_r50_800ep_pretrain.pth --selfsup moco
+```
+
+To use the ResNet-50 backbone released by SwAV, you can download it from [here](https://dl.fbaipublicfiles.com/deepcluster/swav_800ep_pretrain.pth.tar)
+
+### Modify config
+
+The backbone requires SyncBN and the `frozen_stages` need to be changed. A config that use the moco backbone is as below
+
+```python
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ pretrained='./mocov2_r50_800ep_pretrain.pth',
+ backbone=dict(
+ frozen_stages=0,
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False))
+
+```
+
+## Results and Models
+
+| Method | Backbone | Style | Lr schd | Mem (GB) | Inf time (fps) | box AP | mask AP | Config | Download |
+| :-------: | :------------------------------------------------------------: | :-----: | :------------: | :------: | :------------: | :----: | :-----: | :----------------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| Mask RCNN | [R50 by MoCo v2](./mask-rcnn_r50-mocov2-pre_fpn_1x_coco.py) | pytorch | 1x | | | 38.0 | 34.3 | [config](./mask-rcnn_r50-mocov2-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_mocov2-pretrain_1x_coco/mask_rcnn_r50_fpn_mocov2-pretrain_1x_coco_20210604_114614-a8b63483.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_mocov2-pretrain_1x_coco/mask_rcnn_r50_fpn_mocov2-pretrain_1x_coco_20210604_114614.log.json) |
+| Mask RCNN | [R50 by MoCo v2](./mask-rcnn_r50-mocov2-pre_fpn_ms-2x_coco.py) | pytorch | multi-scale 2x | | | 40.8 | 36.8 | [config](./mask-rcnn_r50-mocov2-pre_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_mocov2-pretrain_ms-2x_coco/mask_rcnn_r50_fpn_mocov2-pretrain_ms-2x_coco_20210605_163717-d95df20a.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_mocov2-pretrain_ms-2x_coco/mask_rcnn_r50_fpn_mocov2-pretrain_ms-2x_coco_20210605_163717.log.json) |
+| Mask RCNN | [R50 by SwAV](./mask-rcnn_r50-swav-pre_fpn_1x_coco.py) | pytorch | 1x | | | 39.1 | 35.7 | [config](./mask-rcnn_r50-swav-pre_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_swav-pretrain_1x_coco/mask_rcnn_r50_fpn_swav-pretrain_1x_coco_20210604_114640-7b9baf28.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_swav-pretrain_1x_coco/mask_rcnn_r50_fpn_swav-pretrain_1x_coco_20210604_114640.log.json) |
+| Mask RCNN | [R50 by SwAV](./mask-rcnn_r50-swav-pre_fpn_ms-2x_coco.py) | pytorch | multi-scale 2x | | | 41.3 | 37.3 | [config](./mask-rcnn_r50-swav-pre_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_swav-pretrain_ms-2x_coco/mask_rcnn_r50_fpn_swav-pretrain_ms-2x_coco_20210605_163717-08e26fca.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/selfsup_pretrain/mask_rcnn_r50_fpn_swav-pretrain_ms-2x_coco/mask_rcnn_r50_fpn_swav-pretrain_ms-2x_coco_20210605_163717.log.json) |
+
+### Notice
+
+1. We only provide single-scale 1x and multi-scale 2x configs as examples to show how to use backbones trained by self-supervised algorithms. We will try to reproduce the results in their corresponding paper using the released backbone in the future. Please stay tuned.
+
+## Citation
+
+We support to apply the backbone models pre-trained by different self-supervised methods in detection systems and provide their results on Mask R-CNN.
+
+The pre-trained models are converted from [MoCo](https://github.com/facebookresearch/moco) and downloaded from [SwAV](https://github.com/facebookresearch/swav).
+
+For SwAV, please cite
+
+```latex
+@article{caron2020unsupervised,
+ title={Unsupervised Learning of Visual Features by Contrasting Cluster Assignments},
+ author={Caron, Mathilde and Misra, Ishan and Mairal, Julien and Goyal, Priya and Bojanowski, Piotr and Joulin, Armand},
+ booktitle={Proceedings of Advances in Neural Information Processing Systems (NeurIPS)},
+ year={2020}
+}
+```
+
+For MoCo, please cite
+
+```latex
+@Article{he2019moco,
+ author = {Kaiming He and Haoqi Fan and Yuxin Wu and Saining Xie and Ross Girshick},
+ title = {Momentum Contrast for Unsupervised Visual Representation Learning},
+ journal = {arXiv preprint arXiv:1911.05722},
+ year = {2019},
+}
+@Article{chen2020mocov2,
+ author = {Xinlei Chen and Haoqi Fan and Ross Girshick and Kaiming He},
+ title = {Improved Baselines with Momentum Contrastive Learning},
+ journal = {arXiv preprint arXiv:2003.04297},
+ year = {2020},
+}
+```
diff --git a/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..91d45add8aba54de4b25fba11ecf5e18bca0084f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ frozen_stages=0,
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='./mocov2_r50_800ep_pretrain.pth')))
diff --git a/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ddaebf5558a22680d556aa8b3fe79541d634d910
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-mocov2-pre_fpn_ms-2x_coco.py
@@ -0,0 +1,25 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ frozen_stages=0,
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='./mocov2_r50_800ep_pretrain.pth')))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..785c80ec9d14c8e4b54b2e3359f9b4c680eaca17
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_1x_coco.py
@@ -0,0 +1,13 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ frozen_stages=0,
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='./swav_800ep_pretrain.pth.tar')))
diff --git a/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..c393e0b36047f731c91c3f0963ef90347a0910e9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/selfsup_pretrain/mask-rcnn_r50-swav-pre_fpn_ms-2x_coco.py
@@ -0,0 +1,25 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_2x.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ backbone=dict(
+ frozen_stages=0,
+ norm_cfg=dict(type='SyncBN', requires_grad=True),
+ norm_eval=False,
+ init_cfg=dict(
+ type='Pretrained', checkpoint='./swav_800ep_pretrain.pth.tar')))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomResize', scale=[(1333, 640), (1333, 800)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/README.md b/grounding-dino/mmdetection/configs/simple_copy_paste/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..23b09ce5dbb3e2cba41cad7b6b45fccd95996fb1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/README.md
@@ -0,0 +1,38 @@
+# SimpleCopyPaste
+
+> [Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation](https://arxiv.org/abs/2012.07177)
+
+
+
+## Abstract
+
+Building instance segmentation models that are data-efficient and can handle rare object categories is an important challenge in computer vision. Leveraging data augmentations is a promising direction towards addressing this challenge. Here, we perform a systematic study of the Copy-Paste augmentation (\[13, 12\]) for instance segmentation where we randomly paste objects onto an image. Prior studies on Copy-Paste relied on modeling the surrounding visual context for pasting the objects. However, we find that the simple mechanism of pasting objects randomly is good enough and can provide solid gains on top of strong baselines. Furthermore, we show Copy-Paste is additive with semi-supervised methods that leverage extra data through pseudo labeling (e.g. self-training). On COCO instance segmentation, we achieve 49.1 mask AP and 57.3 box AP, an improvement of +0.6 mask AP and +1.5 box AP over the previous state-of-the-art. We further demonstrate that Copy-Paste can lead to significant improvements on the LVIS benchmark. Our baseline model outperforms the LVIS 2020 Challenge winning entry by +3.6 mask AP on rare categories.
+
+
+
+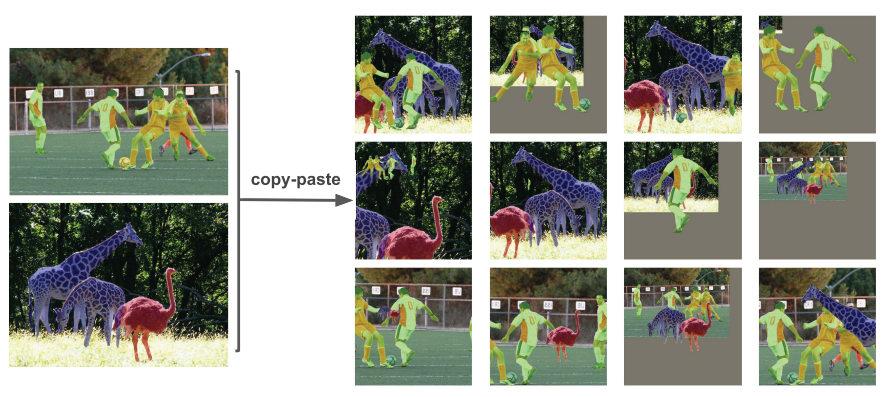 +
+
+
+## Results and Models
+
+### Mask R-CNN with Standard Scale Jittering (SSJ) and Simple Copy-Paste(SCP)
+
+Standard Scale Jittering(SSJ) resizes and crops an image with a resize range of 0.8 to 1.25 of the original image size, and Simple Copy-Paste(SCP) selects a random subset of objects from one of the images and pastes them onto the other image.
+
+| Backbone | Training schedule | Augmentation | batch size | box AP | mask AP | Config | Download |
+| :------: | :---------------: | :----------: | :--------: | :----: | :-----: | :------------------------------------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | 90k | SSJ | 64 | 43.3 | 39.0 | [config](./mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-90k_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco_20220316_181409-f79c84c5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco_20220316_181409.log.json) |
+| R-50 | 90k | SSJ+SCP | 64 | 43.8 | 39.2 | [config](./mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-90k_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco_20220316_181307-6bc5726f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco_20220316_181307.log.json) |
+| R-50 | 270k | SSJ | 64 | 43.5 | 39.1 | [config](./mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco_20220324_182940-33a100c5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco_20220324_182940.log.json) |
+| R-50 | 270k | SSJ+SCP | 64 | 45.1 | 40.3 | [config](./mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco_20220324_201229-80ee90b7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco_20220324_201229.log.json) |
+
+## Citation
+
+```latex
+@inproceedings{ghiasi2021simple,
+ title={Simple copy-paste is a strong data augmentation method for instance segmentation},
+ author={Ghiasi, Golnaz and Cui, Yin and Srinivas, Aravind and Qian, Rui and Lin, Tsung-Yi and Cubuk, Ekin D and Le, Quoc V and Zoph, Barret},
+ booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
+ pages={2918--2928},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0c6e081e860e1240f8d35efa8176563a8b5be845
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py
@@ -0,0 +1,31 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ # 270k iterations with batch_size 64 is roughly equivalent to 144 epochs
+ '../common/ssj_270k_coco-instance.py',
+]
+
+image_size = (1024, 1024)
+batch_augments = [
+ dict(type='BatchFixedSizePad', size=image_size, pad_mask=True)
+]
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+# Use MMSyncBN that handles empty tensor in head. It can be changed to
+# SyncBN after https://github.com/pytorch/pytorch/issues/36530 is fixed
+head_norm_cfg = dict(type='MMSyncBN', requires_grad=True)
+model = dict(
+ # the model is trained from scratch, so init_cfg is None
+ data_preprocessor=dict(
+ # pad_size_divisor=32 is unnecessary in training but necessary
+ # in testing.
+ pad_size_divisor=32,
+ batch_augments=batch_augments),
+ backbone=dict(
+ frozen_stages=-1, norm_eval=False, norm_cfg=norm_cfg, init_cfg=None),
+ neck=dict(norm_cfg=norm_cfg),
+ rpn_head=dict(num_convs=2), # leads to 0.1+ mAP
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=head_norm_cfg),
+ mask_head=dict(norm_cfg=head_norm_cfg)))
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-90k_coco.py b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..abe8962ac69184241e30628242e5313c52f503f4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-90k_coco.py
@@ -0,0 +1,18 @@
+_base_ = 'mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py' # noqa
+
+# training schedule for 90k
+max_iters = 90000
+
+# learning rate policy
+# lr steps at [0.9, 0.95, 0.975] of the maximum iterations
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.067, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=90000,
+ by_epoch=False,
+ milestones=[81000, 85500, 87750],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f0ea57d19728d7c563e56d139888059dd9c81317
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py
@@ -0,0 +1,31 @@
+_base_ = [
+ '../_base_/models/mask-rcnn_r50_fpn.py',
+ # 270k iterations with batch_size 64 is roughly equivalent to 144 epochs
+ '../common/ssj_scp_270k_coco-instance.py'
+]
+
+image_size = (1024, 1024)
+batch_augments = [
+ dict(type='BatchFixedSizePad', size=image_size, pad_mask=True)
+]
+norm_cfg = dict(type='SyncBN', requires_grad=True)
+# Use MMSyncBN that handles empty tensor in head. It can be changed to
+# SyncBN after https://github.com/pytorch/pytorch/issues/36530 is fixed
+head_norm_cfg = dict(type='MMSyncBN', requires_grad=True)
+model = dict(
+ # the model is trained from scratch, so init_cfg is None
+ data_preprocessor=dict(
+ # pad_size_divisor=32 is unnecessary in training but necessary
+ # in testing.
+ pad_size_divisor=32,
+ batch_augments=batch_augments),
+ backbone=dict(
+ frozen_stages=-1, norm_eval=False, norm_cfg=norm_cfg, init_cfg=None),
+ neck=dict(norm_cfg=norm_cfg),
+ rpn_head=dict(num_convs=2), # leads to 0.1+ mAP
+ roi_head=dict(
+ bbox_head=dict(
+ type='Shared4Conv1FCBBoxHead',
+ conv_out_channels=256,
+ norm_cfg=head_norm_cfg),
+ mask_head=dict(norm_cfg=head_norm_cfg)))
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-90k_coco.py b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-90k_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e158b5c05aae3345ba9d4d1a55d1bbb82a789726
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-90k_coco.py
@@ -0,0 +1,18 @@
+_base_ = 'mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py' # noqa
+
+# training schedule for 90k
+max_iters = 90000
+
+# learning rate policy
+# lr steps at [0.9, 0.95, 0.975] of the maximum iterations
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.067, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=90000,
+ by_epoch=False,
+ milestones=[81000, 85500, 87750],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/simple_copy_paste/metafile.yml b/grounding-dino/mmdetection/configs/simple_copy_paste/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..8a40b658feeefd870300e62934ea21315218bfba
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/simple_copy_paste/metafile.yml
@@ -0,0 +1,92 @@
+Collections:
+ - Name: SimpleCopyPaste
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 32x A100 GPUs
+ Architecture:
+ - Softmax
+ - RPN
+ - Convolution
+ - Dense Connections
+ - FPN
+ - ResNet
+ - RoIAlign
+ Paper:
+ URL: https://arxiv.org/abs/2012.07177
+ Title: "Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation"
+ README: configs/simple_copy_paste/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.25.0/mmdet/datasets/pipelines/transforms.py#L2762
+ Version: v2.25.0
+
+Models:
+ - Name: mask-rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco
+ In Collection: SimpleCopyPaste
+ Config: configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-270k_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ Iterations: 270000
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.5
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_270k_coco_20220324_182940-33a100c5.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco
+ In Collection: SimpleCopyPaste
+ Config: configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-90k_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ Iterations: 90000
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.3
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_32x2_90k_coco_20220316_181409-f79c84c5.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco
+ In Collection: SimpleCopyPaste
+ Config: configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-270k_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ Iterations: 270000
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 45.1
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 40.3
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_270k_coco_20220324_201229-80ee90b7.pth
+
+ - Name: mask-rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco
+ In Collection: SimpleCopyPaste
+ Config: configs/simple_copy_paste/mask-rcnn_r50_fpn_rpn-2conv_4conv1fc_syncbn-all_32xb2-ssj-scp-90k_coco.py
+ Metadata:
+ Training Memory (GB): 7.2
+ Iterations: 90000
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.8
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 39.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/simple_copy_paste/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco/mask_rcnn_r50_fpn_syncbn-all_rpn-2conv_ssj_scp_32x2_90k_coco_20220316_181307-6bc5726f.pth
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/README.md b/grounding-dino/mmdetection/configs/soft_teacher/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1fd3d84dc36b8f7e4a0342e951f81979f1a9dce9
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/README.md
@@ -0,0 +1,33 @@
+# SoftTeacher
+
+> [End-to-End Semi-Supervised Object Detection with Soft Teacher](https://arxiv.org/abs/2106.09018)
+
+
+
+## Abstract
+
+This paper presents an end-to-end semi-supervised object detection approach, in contrast to previous more complex multi-stage methods. The end-to-end training gradually improves pseudo label qualities during the curriculum, and the more and more accurate pseudo labels in turn benefit object detection training. We also propose two simple yet effective techniques within this framework: a soft teacher mechanism where the classification loss of each unlabeled bounding box is weighed by the classification score produced by the teacher network; a box jittering approach to select reliable pseudo boxes for the learning of box regression. On the COCO benchmark, the proposed approach outperforms previous methods by a large margin under various labeling ratios, i.e. 1%, 5% and 10%. Moreover, our approach proves to perform also well when the amount of labeled data is relatively large. For example, it can improve a 40.9 mAP baseline detector trained using the full COCO training set by +3.6 mAP, reaching 44.5 mAP, by leveraging the 123K unlabeled images of COCO. On the state-of-the-art Swin Transformer based object detector (58.9 mAP on test-dev), it can still significantly improve the detection accuracy by +1.5 mAP, reaching 60.4 mAP, and improve the instance segmentation accuracy by +1.2 mAP, reaching 52.4 mAP. Further incorporating with the Object365 pre-trained model, the detection accuracy reaches 61.3 mAP and the instance segmentation accuracy reaches 53.0 mAP, pushing the new state-of-the-art.
+
+
+
+ +
+
+
+## Results and Models
+
+| Model | Detector | Labeled Dataset | Iteration | box AP | Config | Download |
+| :---------: | :----------: | :-------------: | :-------: | :----: | :-----------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| SoftTeacher | Faster R-CNN | COCO-1% | 180k | 19.9 | [config](./soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_233412-3c8f6d4a.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_233412.log.json) |
+| SoftTeacher | Faster R-CNN | COCO-2% | 180k | 24.9 | [config](./soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_020244-c0d2c3aa.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_020244.log.json) |
+| SoftTeacher | Faster R-CNN | COCO-5% | 180k | 30.4 | [config](./soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_070656-308798ad.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_070656.log.json) |
+| SoftTeacher | Faster R-CNN | COCO-10% | 180k | 33.8 | [config](./soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py) | [model](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_232113-b46f78d0.pth) \| [log](https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_232113.log.json) |
+
+## Citation
+
+```latex
+@article{xu2021end,
+ title={End-to-End Semi-Supervised Object Detection with Soft Teacher},
+ author={Xu, Mengde and Zhang, Zheng and Hu, Han and Wang, Jianfeng and Wang, Lijuan and Wei, Fangyun and Bai, Xiang and Liu, Zicheng},
+ journal={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/metafile.yml b/grounding-dino/mmdetection/configs/soft_teacher/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9622acec93ad3138daff09930ecfa2807dc7748a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/metafile.yml
@@ -0,0 +1,67 @@
+Collections:
+ - Name: SoftTeacher
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2106.09018
+ Title: "End-to-End Semi-Supervised Object Detection with Soft Teacher"
+ README: configs/soft_teacher/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v3.0.0rc1/mmdet/models/detectors/soft_teacher.py#L20
+ Version: v3.0.0rc1
+
+Models:
+ - Name: soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py
+ In Collection: SoftTeacher
+ Config: configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py
+ Metadata:
+ Iterations: 180000
+ Results:
+ - Task: Semi-Supervised Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 19.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_233412-3c8f6d4a.pth
+
+ - Name: soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py
+ In Collection: SoftTeacher
+ Config: configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py
+ Metadata:
+ Iterations: 180000
+ Results:
+ - Task: Semi-Supervised Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 24.9
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_020244-c0d2c3aa.pth
+
+ - Name: soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py
+ In Collection: SoftTeacher
+ Config: configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py
+ Metadata:
+ Iterations: 180000
+ Results:
+ - Task: Semi-Supervised Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 30.4
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230331_070656-308798ad.pth
+
+ - Name: soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py
+ In Collection: SoftTeacher
+ Config: configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py
+ Metadata:
+ Iterations: 180000
+ Results:
+ - Task: Semi-Supervised Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 33.8
+ Weights: https://download.openmmlab.com/mmdetection/v3.0/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0_20230330_232113-b46f78d0.pth
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2bd09645598204482e9f88f6baf00d32eba9cab6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.01-coco.py
@@ -0,0 +1,9 @@
+_base_ = ['soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py']
+
+# 1% coco train2017 is set as labeled dataset
+labeled_dataset = _base_.labeled_dataset
+unlabeled_dataset = _base_.unlabeled_dataset
+labeled_dataset.ann_file = 'semi_anns/instances_train2017.1@1.json'
+unlabeled_dataset.ann_file = 'semi_anns/instances_train2017.1@1-unlabeled.json'
+train_dataloader = dict(
+ dataset=dict(datasets=[labeled_dataset, unlabeled_dataset]))
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..8ca38c931926cef33321f931b0c6d5c66824ff55
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.02-coco.py
@@ -0,0 +1,9 @@
+_base_ = ['soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py']
+
+# 2% coco train2017 is set as labeled dataset
+labeled_dataset = _base_.labeled_dataset
+unlabeled_dataset = _base_.unlabeled_dataset
+labeled_dataset.ann_file = 'semi_anns/instances_train2017.1@2.json'
+unlabeled_dataset.ann_file = 'semi_anns/instances_train2017.1@2-unlabeled.json'
+train_dataloader = dict(
+ dataset=dict(datasets=[labeled_dataset, unlabeled_dataset]))
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..750b7ed6df6c91bab8f68f58f339b2f3696fa693
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.05-coco.py
@@ -0,0 +1,9 @@
+_base_ = ['soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py']
+
+# 5% coco train2017 is set as labeled dataset
+labeled_dataset = _base_.labeled_dataset
+unlabeled_dataset = _base_.unlabeled_dataset
+labeled_dataset.ann_file = 'semi_anns/instances_train2017.1@5.json'
+unlabeled_dataset.ann_file = 'semi_anns/instances_train2017.1@5-unlabeled.json'
+train_dataloader = dict(
+ dataset=dict(datasets=[labeled_dataset, unlabeled_dataset]))
diff --git a/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3713aef442f4add55efafde08b2c98da1773bab0
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/soft_teacher/soft-teacher_faster-rcnn_r50-caffe_fpn_180k_semi-0.1-coco.py
@@ -0,0 +1,84 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/default_runtime.py',
+ '../_base_/datasets/semi_coco_detection.py'
+]
+
+detector = _base_.model
+detector.data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32)
+detector.backbone = dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron2/resnet50_caffe'))
+
+model = dict(
+ _delete_=True,
+ type='SoftTeacher',
+ detector=detector,
+ data_preprocessor=dict(
+ type='MultiBranchDataPreprocessor',
+ data_preprocessor=detector.data_preprocessor),
+ semi_train_cfg=dict(
+ freeze_teacher=True,
+ sup_weight=1.0,
+ unsup_weight=4.0,
+ pseudo_label_initial_score_thr=0.5,
+ rpn_pseudo_thr=0.9,
+ cls_pseudo_thr=0.9,
+ reg_pseudo_thr=0.02,
+ jitter_times=10,
+ jitter_scale=0.06,
+ min_pseudo_bbox_wh=(1e-2, 1e-2)),
+ semi_test_cfg=dict(predict_on='teacher'))
+
+# 10% coco train2017 is set as labeled dataset
+labeled_dataset = _base_.labeled_dataset
+unlabeled_dataset = _base_.unlabeled_dataset
+labeled_dataset.ann_file = 'semi_anns/instances_train2017.1@10.json'
+unlabeled_dataset.ann_file = 'semi_anns/' \
+ 'instances_train2017.1@10-unlabeled.json'
+unlabeled_dataset.data_prefix = dict(img='train2017/')
+train_dataloader = dict(
+ dataset=dict(datasets=[labeled_dataset, unlabeled_dataset]))
+
+# training schedule for 180k
+train_cfg = dict(
+ type='IterBasedTrainLoop', max_iters=180000, val_interval=5000)
+val_cfg = dict(type='TeacherStudentValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=180000,
+ by_epoch=False,
+ milestones=[120000, 160000],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
+
+default_hooks = dict(
+ checkpoint=dict(by_epoch=False, interval=10000, max_keep_ckpts=2))
+log_processor = dict(by_epoch=False)
+
+custom_hooks = [dict(type='MeanTeacherHook')]
diff --git a/grounding-dino/mmdetection/configs/solo/README.md b/grounding-dino/mmdetection/configs/solo/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..4a36676b1b5e0fafd3bfb1cbe4a6cef5fd549c57
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/README.md
@@ -0,0 +1,54 @@
+# SOLO
+
+> [SOLO: Segmenting Objects by Locations](https://arxiv.org/abs/1912.04488)
+
+
+
+## Abstract
+
+We present a new, embarrassingly simple approach to instance segmentation in images. Compared to many other dense prediction tasks, e.g., semantic segmentation, it is the arbitrary number of instances that have made instance segmentation much more challenging. In order to predict a mask for each instance, mainstream approaches either follow the 'detect-thensegment' strategy as used by Mask R-CNN, or predict category masks first then use clustering techniques to group pixels into individual instances. We view the task of instance segmentation from a completely new perspective by introducing the notion of "instance categories", which assigns categories to each pixel within an instance according to the instance's location and size, thus nicely converting instance mask segmentation into a classification-solvable problem. Now instance segmentation is decomposed into two classification tasks. We demonstrate a much simpler and flexible instance segmentation framework with strong performance, achieving on par accuracy with Mask R-CNN and outperforming recent singleshot instance segmenters in accuracy. We hope that this very simple and strong framework can serve as a baseline for many instance-level recognition tasks besides instance segmentation.
+
+
+
+ +
+
+
+## Results and Models
+
+### SOLO
+
+| Backbone | Style | MS train | Lr schd | Mem (GB) | Inf time (fps) | mask AP | Download |
+| :------: | :-----: | :------: | :-----: | :------: | :------------: | :-----: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | N | 1x | 8.0 | 14.0 | 33.1 | [model](https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_1x_coco/solo_r50_fpn_1x_coco_20210821_035055-2290a6b8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_1x_coco/solo_r50_fpn_1x_coco_20210821_035055.log.json) |
+| R-50 | pytorch | Y | 3x | 7.4 | 14.0 | 35.9 | [model](https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_3x_coco/solo_r50_fpn_3x_coco_20210901_012353-11d224d7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_3x_coco/solo_r50_fpn_3x_coco_20210901_012353.log.json) |
+
+### Decoupled SOLO
+
+| Backbone | Style | MS train | Lr schd | Mem (GB) | Inf time (fps) | mask AP | Download |
+| :------: | :-----: | :------: | :-----: | :------: | :------------: | :-----: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | N | 1x | 7.8 | 12.5 | 33.9 | [model](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_1x_coco/decoupled_solo_r50_fpn_1x_coco_20210820_233348-6337c589.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_1x_coco/decoupled_solo_r50_fpn_1x_coco_20210820_233348.log.json) |
+| R-50 | pytorch | Y | 3x | 7.9 | 12.5 | 36.7 | [model](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_3x_coco/decoupled_solo_r50_fpn_3x_coco_20210821_042504-7b3301ec.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_3x_coco/decoupled_solo_r50_fpn_3x_coco_20210821_042504.log.json) |
+
+- Decoupled SOLO has a decoupled head which is different from SOLO head.
+ Decoupled SOLO serves as an efficient and equivalent variant in accuracy
+ of SOLO. Please refer to the corresponding config files for details.
+
+### Decoupled Light SOLO
+
+| Backbone | Style | MS train | Lr schd | Mem (GB) | Inf time (fps) | mask AP | Download |
+| :------: | :-----: | :------: | :-----: | :------: | :------------: | :-----: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | Y | 3x | 2.2 | 31.2 | 32.9 | [model](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_light_r50_fpn_3x_coco/decoupled_solo_light_r50_fpn_3x_coco_20210906_142703-e70e226f.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_light_r50_fpn_3x_coco/decoupled_solo_light_r50_fpn_3x_coco_20210906_142703.log.json) |
+
+- Decoupled Light SOLO using decoupled structure similar to Decoupled
+ SOLO head, with light-weight head and smaller input size, Please refer
+ to the corresponding config files for details.
+
+## Citation
+
+```latex
+@inproceedings{wang2020solo,
+ title = {{SOLO}: Segmenting Objects by Locations},
+ author = {Wang, Xinlong and Kong, Tao and Shen, Chunhua and Jiang, Yuning and Li, Lei},
+ booktitle = {Proc. Eur. Conf. Computer Vision (ECCV)},
+ year = {2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/solo/decoupled-solo-light_r50_fpn_3x_coco.py b/grounding-dino/mmdetection/configs/solo/decoupled-solo-light_r50_fpn_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..fc35df3c3cbbd70532e066de27b06418549eb906
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/decoupled-solo-light_r50_fpn_3x_coco.py
@@ -0,0 +1,50 @@
+_base_ = './decoupled-solo_r50_fpn_3x_coco.py'
+
+# model settings
+model = dict(
+ mask_head=dict(
+ type='DecoupledSOLOLightHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=4,
+ feat_channels=256,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 64), (32, 128), (64, 256), (128, 512), (256, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ loss_mask=dict(
+ type='DiceLoss', use_sigmoid=True, activate=False,
+ loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(852, 512), (852, 480), (852, 448), (852, 416), (852, 384),
+ (852, 352)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(852, 512), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..6d7f4b90c19d9fdcc3c895deb4101cf7acd7bd8e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_1x_coco.py
@@ -0,0 +1,24 @@
+_base_ = './solo_r50_fpn_1x_coco.py'
+# model settings
+model = dict(
+ mask_head=dict(
+ type='DecoupledSOLOHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=7,
+ feat_channels=256,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 96), (48, 192), (96, 384), (192, 768), (384, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ loss_mask=dict(
+ type='DiceLoss', use_sigmoid=True, activate=False,
+ loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
diff --git a/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_3x_coco.py b/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..4a8c19decb72a3d904a277faac06670999f6b322
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/decoupled-solo_r50_fpn_3x_coco.py
@@ -0,0 +1,25 @@
+_base_ = './solo_r50_fpn_3x_coco.py'
+
+# model settings
+model = dict(
+ mask_head=dict(
+ type='DecoupledSOLOHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=7,
+ feat_channels=256,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 96), (48, 192), (96, 384), (192, 768), (384, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ loss_mask=dict(
+ type='DiceLoss', use_sigmoid=True, activate=False,
+ loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)))
diff --git a/grounding-dino/mmdetection/configs/solo/metafile.yml b/grounding-dino/mmdetection/configs/solo/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..aa38b8c07b3db7eb018bb769b6eca6e010a1d764
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/metafile.yml
@@ -0,0 +1,115 @@
+Collections:
+ - Name: SOLO
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - Convolution
+ - ResNet
+ Paper: https://arxiv.org/abs/1912.04488
+ README: configs/solo/README.md
+
+Models:
+ - Name: decoupled-solo_r50_fpn_1x_coco
+ In Collection: SOLO
+ Config: configs/solo/decoupled-solo_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 7.8
+ Epochs: 12
+ inference time (ms/im):
+ - value: 116.4
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (1333, 800)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 33.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_1x_coco/decoupled_solo_r50_fpn_1x_coco_20210820_233348-6337c589.pth
+
+ - Name: decoupled-solo_r50_fpn_3x_coco
+ In Collection: SOLO
+ Config: configs/solo/decoupled-solo_r50_fpn_3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.9
+ Epochs: 36
+ inference time (ms/im):
+ - value: 117.2
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (1333, 800)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 36.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_r50_fpn_3x_coco/decoupled_solo_r50_fpn_3x_coco_20210821_042504-7b3301ec.pth
+
+ - Name: decoupled-solo-light_r50_fpn_3x_coco
+ In Collection: SOLO
+ Config: configs/solo/decoupled-solo-light_r50_fpn_3x_coco.py
+ Metadata:
+ Training Memory (GB): 2.2
+ Epochs: 36
+ inference time (ms/im):
+ - value: 35.0
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (852, 512)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 32.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solo/decoupled_solo_light_r50_fpn_3x_coco/decoupled_solo_light_r50_fpn_3x_coco_20210906_142703-e70e226f.pth
+
+ - Name: solo_r50_fpn_3x_coco
+ In Collection: SOLO
+ Config: configs/solo/solo_r50_fpn_3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.4
+ Epochs: 36
+ inference time (ms/im):
+ - value: 94.2
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (1333, 800)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 35.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_3x_coco/solo_r50_fpn_3x_coco_20210901_012353-11d224d7.pth
+
+ - Name: solo_r50_fpn_1x_coco
+ In Collection: SOLO
+ Config: configs/solo/solo_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.0
+ Epochs: 12
+ inference time (ms/im):
+ - value: 95.1
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (1333, 800)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 33.1
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solo/solo_r50_fpn_1x_coco/solo_r50_fpn_1x_coco_20210821_035055-2290a6b8.pth
diff --git a/grounding-dino/mmdetection/configs/solo/solo_r101_fpn_8xb8-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/solo/solo_r101_fpn_8xb8-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0f49c5c1ce67973d15b3fad3ad8c966af8203af7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/solo_r101_fpn_8xb8-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './solo_r50_fpn_8xb8-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/solo/solo_r18_fpn_8xb8-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/solo/solo_r18_fpn_8xb8-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..977ae54dc28e56802289ac552ce20815b7d1d761
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/solo_r18_fpn_8xb8-lsj-200e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './solo_r50_fpn_8xb8-lsj-200e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=18,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..595e9ffe148be84dcc3d5c89e5315e8ef3a24477
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_1x_coco.py
@@ -0,0 +1,62 @@
+_base_ = [
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ type='SOLO',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=0,
+ num_outs=5),
+ mask_head=dict(
+ type='SOLOHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=7,
+ feat_channels=256,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 96), (48, 192), (96, 384), (192, 768), (384, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ loss_mask=dict(type='DiceLoss', use_sigmoid=True, loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)),
+ # model training and testing settings
+ test_cfg=dict(
+ nms_pre=500,
+ score_thr=0.1,
+ mask_thr=0.5,
+ filter_thr=0.05,
+ kernel='gaussian', # gaussian/linear
+ sigma=2.0,
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(optimizer=dict(lr=0.01))
+
+val_evaluator = dict(metric='segm')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_3x_coco.py b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0d5abbd2f4d4e1fdc2e3cb92c8e0157188b0aa9a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_3x_coco.py
@@ -0,0 +1,35 @@
+_base_ = './solo_r50_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 800), (1333, 768), (1333, 736), (1333, 704),
+ (1333, 672), (1333, 640)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# training schedule for 3x
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=36,
+ by_epoch=True,
+ milestones=[27, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_8xb8-lsj-200e_coco.py b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_8xb8-lsj-200e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d46bf391c907707d222756e9450b661b6edd6985
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solo/solo_r50_fpn_8xb8-lsj-200e_coco.py
@@ -0,0 +1,71 @@
+_base_ = '../common/lsj-200e_coco-instance.py'
+
+image_size = (1024, 1024)
+batch_augments = [dict(type='BatchFixedSizePad', size=image_size)]
+
+# model settings
+model = dict(
+ type='SOLO',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32,
+ batch_augments=batch_augments),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=0,
+ num_outs=5),
+ mask_head=dict(
+ type='SOLOHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=7,
+ feat_channels=256,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 96), (48, 192), (96, 384), (192, 768), (384, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ loss_mask=dict(type='DiceLoss', use_sigmoid=True, loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)),
+ # model training and testing settings
+ test_cfg=dict(
+ nms_pre=500,
+ score_thr=0.1,
+ mask_thr=0.5,
+ filter_thr=0.05,
+ kernel='gaussian', # gaussian/linear
+ sigma=2.0,
+ max_per_img=100))
+
+train_dataloader = dict(batch_size=8, num_workers=4)
+
+# Enable automatic-mixed-precision training with AmpOptimWrapper.
+optim_wrapper = dict(
+ type='AmpOptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=0.01 * 4, momentum=0.9, weight_decay=0.00004),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/solov2/README.md b/grounding-dino/mmdetection/configs/solov2/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..b216913126e7ee86fc474c2cb1cc8b6023e251d1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/README.md
@@ -0,0 +1,59 @@
+# SOLOv2
+
+> [SOLOv2: Dynamic and Fast Instance Segmentation](https://arxiv.org/abs/2003.10152)
+
+
+
+## Abstract
+
+In this work, we aim at building a simple, direct, and fast instance segmentation
+framework with strong performance. We follow the principle of the SOLO method of
+Wang et al. "SOLO: segmenting objects by locations". Importantly, we take one
+step further by dynamically learning the mask head of the object segmenter such
+that the mask head is conditioned on the location. Specifically, the mask branch
+is decoupled into a mask kernel branch and mask feature branch, which are
+responsible for learning the convolution kernel and the convolved features
+respectively. Moreover, we propose Matrix NMS (non maximum suppression) to
+significantly reduce the inference time overhead due to NMS of masks. Our
+Matrix NMS performs NMS with parallel matrix operations in one shot, and
+yields better results. We demonstrate a simple direct instance segmentation
+system, outperforming a few state-of-the-art methods in both speed and accuracy.
+A light-weight version of SOLOv2 executes at 31.3 FPS and yields 37.1% AP.
+Moreover, our state-of-the-art results in object detection (from our mask byproduct)
+and panoptic segmentation show the potential to serve as a new strong baseline
+for many instance-level recognition tasks besides instance segmentation.
+
+
+
+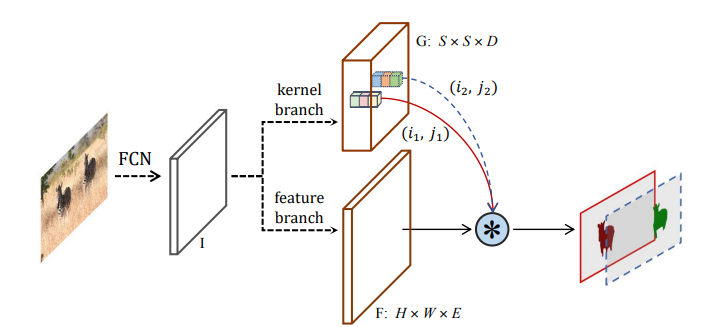 +
+
+
+## Results and Models
+
+### SOLOv2
+
+| Backbone | Style | MS train | Lr schd | Mem (GB) | mask AP | Config | Download |
+| :--------: | :-----: | :------: | :-----: | :------: | :-----: | :-------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | N | 1x | 5.1 | 34.8 | [config](./solov2_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_1x_coco/solov2_r50_fpn_1x_coco_20220512_125858-a357fa23.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_1x_coco/solov2_r50_fpn_1x_coco_20220512_125858.log.json) |
+| R-50 | pytorch | Y | 3x | 5.1 | 37.5 | [config](./solov2_r50_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_3x_coco/solov2_r50_fpn_3x_coco_20220512_125856-fed092d4.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_3x_coco/solov2_r50_fpn_3x_coco_20220512_125856.log.json) |
+| R-101 | pytorch | Y | 3x | 6.9 | 39.1 | [config](./solov2_r101_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r101_fpn_3x_coco/solov2_r101_fpn_3x_coco_20220511_095119-c559a076.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r101_fpn_3x_coco/solov2_r101_fpn_3x_coco_20220511_095119.log.json) |
+| R-101(DCN) | pytorch | Y | 3x | 7.1 | 41.2 | [config](./solov2_r101-dcn_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r101_dcn_fpn_3x_coco/solov2_r101_dcn_fpn_3x_coco_20220513_214734-16c966cb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r101_dcn_fpn_3x_coco/solov2_r101_dcn_fpn_3x_coco_20220513_214734.log.json) |
+| X-101(DCN) | pytorch | Y | 3x | 11.3 | 42.4 | [config](./solov2_x101-dcn_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_x101_dcn_fpn_3x_coco/solov2_x101_dcn_fpn_3x_coco_20220513_214337-aef41095.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_x101_dcn_fpn_3x_coco/solov2_x101_dcn_fpn_3x_coco_20220513_214337.log.json) |
+
+### Light SOLOv2
+
+| Backbone | Style | MS train | Lr schd | Mem (GB) | mask AP | Config | Download |
+| :------: | :-----: | :------: | :-----: | :------: | :-----: | :--------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-18 | pytorch | Y | 3x | 9.1 | 29.7 | [config](./solov2-light_r18_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r18_fpn_3x_coco/solov2_light_r18_fpn_3x_coco_20220511_083717-75fa355b.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r18_fpn_3x_coco/solov2_light_r18_fpn_3x_coco_20220511_083717.log.json) |
+| R-34 | pytorch | Y | 3x | 9.3 | 31.9 | [config](./solov2-light_r34_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r34_fpn_3x_coco/solov2_light_r34_fpn_3x_coco_20220511_091839-e51659d3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r34_fpn_3x_coco/solov2_light_r34_fpn_3x_coco_20220511_091839.log.json) |
+| R-50 | pytorch | Y | 3x | 9.9 | 33.7 | [config](./solov2-light_r50_fpn_ms-3x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r50_fpn_3x_coco/solov2_light_r50_fpn_3x_coco_20220512_165256-c93a6074.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r50_fpn_3x_coco/solov2_light_r50_fpn_3x_coco_20220512_165256.log.json) |
+
+## Citation
+
+```latex
+@article{wang2020solov2,
+ title={SOLOv2: Dynamic and Fast Instance Segmentation},
+ author={Wang, Xinlong and Zhang, Rufeng and Kong, Tao and Li, Lei and Shen, Chunhua},
+ journal={Proc. Advances in Neural Information Processing Systems (NeurIPS)},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/solov2/metafile.yml b/grounding-dino/mmdetection/configs/solov2/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d0156b2b40cf62537cdc62af4fa57d644a7978ad
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/metafile.yml
@@ -0,0 +1,93 @@
+Collections:
+ - Name: SOLOv2
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x A100 GPUs
+ Architecture:
+ - FPN
+ - Convolution
+ - ResNet
+ Paper: https://arxiv.org/abs/2003.10152
+ README: configs/solov2/README.md
+
+Models:
+ - Name: solov2_r50_fpn_1x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2_r50_fpn_1x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ Epochs: 12
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 34.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_1x_coco/solov2_r50_fpn_1x_coco_20220512_125858-a357fa23.pth
+
+ - Name: solov2_r50_fpn_ms-3x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2_r50_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 5.1
+ Epochs: 36
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r50_fpn_3x_coco/solov2_r50_fpn_3x_coco_20220512_125856-fed092d4.pth
+
+ - Name: solov2_r101-dcn_fpn_ms-3x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2_r101-dcn_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 7.1
+ Epochs: 36
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 41.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_r101_dcn_fpn_3x_coco/solov2_r101_dcn_fpn_3x_coco_20220513_214734-16c966cb.pth
+
+ - Name: solov2_x101-dcn_fpn_ms-3x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2_x101-dcn_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 11.3
+ Epochs: 36
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 42.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_x101_dcn_fpn_3x_coco/solov2_x101_dcn_fpn_3x_coco_20220513_214337-aef41095.pth
+
+ - Name: solov2-light_r18_fpn_ms-3x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2-light_r18_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 9.1
+ Epochs: 36
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 29.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r18_fpn_3x_coco/solov2_light_r18_fpn_3x_coco_20220511_083717-75fa355b.pth
+
+ - Name: solov2-light_r50_fpn_ms-3x_coco
+ In Collection: SOLOv2
+ Config: configs/solov2/solov2-light_r50_fpn_ms-3x_coco.py
+ Metadata:
+ Training Memory (GB): 9.9
+ Epochs: 36
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 33.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/solov2/solov2_light_r50_fpn_3x_coco/solov2_light_r50_fpn_3x_coco_20220512_165256-c93a6074.pth
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2-light_r18_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2-light_r18_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..f8fc53e0aed9dd4479f9cd8dcc98ca61db2e50bf
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2-light_r18_fpn_ms-3x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './solov2-light_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=18, init_cfg=dict(checkpoint='torchvision://resnet18')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2-light_r34_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2-light_r34_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..149b336655349c70233e78d03f72d7ee3f1a75f3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2-light_r34_fpn_ms-3x_coco.py
@@ -0,0 +1,7 @@
+_base_ = './solov2-light_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=34, init_cfg=dict(checkpoint='torchvision://resnet34')),
+ neck=dict(in_channels=[64, 128, 256, 512]))
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2-light_r50-dcn_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2-light_r50-dcn_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..05391944b683985ab975dc8f66be0c8a12f7d255
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2-light_r50-dcn_fpn_ms-3x_coco.py
@@ -0,0 +1,14 @@
+_base_ = './solov2-light_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ dcn=dict(type='DCNv2', deformable_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)),
+ mask_head=dict(
+ feat_channels=256,
+ stacked_convs=3,
+ scale_ranges=((1, 64), (32, 128), (64, 256), (128, 512), (256, 2048)),
+ mask_feature_head=dict(out_channels=128),
+ dcn_cfg=dict(type='DCNv2'),
+ dcn_apply_to_all_conv=False)) # light solov2 head
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2-light_r50_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2-light_r50_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..cf0a7f779c0f587d11c86a31aca19b2663f79a57
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2-light_r50_fpn_ms-3x_coco.py
@@ -0,0 +1,56 @@
+_base_ = './solov2_r50_fpn_1x_coco.py'
+
+# model settings
+model = dict(
+ mask_head=dict(
+ stacked_convs=2,
+ feat_channels=256,
+ scale_ranges=((1, 56), (28, 112), (56, 224), (112, 448), (224, 896)),
+ mask_feature_head=dict(out_channels=128)))
+
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(768, 512), (768, 480), (768, 448), (768, 416), (768, 384),
+ (768, 352)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(448, 768), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# training schedule for 3x
+max_epochs = 36
+train_cfg = dict(by_epoch=True, max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=36,
+ by_epoch=True,
+ milestones=[27, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2_r101-dcn_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2_r101-dcn_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..370a4eb7db811b285cc55282e4b66360ca338a31
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2_r101-dcn_fpn_ms-3x_coco.py
@@ -0,0 +1,13 @@
+_base_ = './solov2_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(checkpoint='torchvision://resnet101'),
+ dcn=dict(type='DCNv2', deformable_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)),
+ mask_head=dict(
+ mask_feature_head=dict(conv_cfg=dict(type='DCNv2')),
+ dcn_cfg=dict(type='DCNv2'),
+ dcn_apply_to_all_conv=True))
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2_r101_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2_r101_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..96aaac0a7c2689a125ac0a68edaff2a76dfc773d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2_r101_fpn_ms-3x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './solov2_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ depth=101, init_cfg=dict(checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..138ca010b5f3f96a4f296ffbe66cb1be3add7ec2
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_1x_coco.py
@@ -0,0 +1,70 @@
+_base_ = [
+ '../_base_/datasets/coco_instance.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+
+# model settings
+model = dict(
+ type='SOLOv2',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_mask=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50'),
+ style='pytorch'),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=0,
+ num_outs=5),
+ mask_head=dict(
+ type='SOLOV2Head',
+ num_classes=80,
+ in_channels=256,
+ feat_channels=512,
+ stacked_convs=4,
+ strides=[8, 8, 16, 32, 32],
+ scale_ranges=((1, 96), (48, 192), (96, 384), (192, 768), (384, 2048)),
+ pos_scale=0.2,
+ num_grids=[40, 36, 24, 16, 12],
+ cls_down_index=0,
+ mask_feature_head=dict(
+ feat_channels=128,
+ start_level=0,
+ end_level=3,
+ out_channels=256,
+ mask_stride=4,
+ norm_cfg=dict(type='GN', num_groups=32, requires_grad=True)),
+ loss_mask=dict(type='DiceLoss', use_sigmoid=True, loss_weight=3.0),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0)),
+ # model training and testing settings
+ test_cfg=dict(
+ nms_pre=500,
+ score_thr=0.1,
+ mask_thr=0.5,
+ filter_thr=0.05,
+ kernel='gaussian', # gaussian/linear
+ sigma=2.0,
+ max_per_img=100))
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.01), clip_grad=dict(max_norm=35, norm_type=2))
+
+val_evaluator = dict(metric='segm')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d6f09827efbe4e135a784b0808604dbc855ed47e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2_r50_fpn_ms-3x_coco.py
@@ -0,0 +1,35 @@
+_base_ = './solov2_r50_fpn_1x_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='RandomChoiceResize',
+ scales=[(1333, 800), (1333, 768), (1333, 736), (1333, 704),
+ (1333, 672), (1333, 640)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+
+# training schedule for 3x
+max_epochs = 36
+train_cfg = dict(max_epochs=max_epochs)
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=1.0 / 3,
+ by_epoch=False,
+ begin=0,
+ end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=36,
+ by_epoch=True,
+ milestones=[27, 33],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/solov2/solov2_x101-dcn_fpn_ms-3x_coco.py b/grounding-dino/mmdetection/configs/solov2/solov2_x101-dcn_fpn_ms-3x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..612c45eb437efc481948edb660ef1a3eebbcfebe
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/solov2/solov2_x101-dcn_fpn_ms-3x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './solov2_r50_fpn_ms-3x_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ dcn=dict(type='DCNv2', deformable_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')),
+ mask_head=dict(
+ mask_feature_head=dict(conv_cfg=dict(type='DCNv2')),
+ dcn_cfg=dict(type='DCNv2'),
+ dcn_apply_to_all_conv=True))
diff --git a/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
new file mode 100644
index 0000000000000000000000000000000000000000..f1d5b72ce3fff73504a0c032867d246bc4e30123
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
@@ -0,0 +1,41 @@
+_base_ = [
+ '../_base_/models/faster-rcnn_r50_fpn.py',
+ '../_base_/datasets/mot_challenge_det.py', '../_base_/default_runtime.py'
+]
+
+model = dict(
+ rpn_head=dict(
+ bbox_coder=dict(clip_border=False),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0 / 9.0, loss_weight=1.0)),
+ roi_head=dict(
+ bbox_head=dict(
+ num_classes=1,
+ bbox_coder=dict(clip_border=False),
+ loss_bbox=dict(type='SmoothL1Loss', loss_weight=1.0))),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint= # noqa: E251
+ 'http://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_2x_coco/faster_rcnn_r50_fpn_2x_coco_bbox_mAP-0.384_20200504_210434-a5d8aa15.pth' # noqa: E501
+ ))
+
+# training schedule for 4e
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=4, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.01, by_epoch=False, begin=0, end=100),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=4,
+ by_epoch=True,
+ milestones=[3],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17train.py b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17train.py
new file mode 100644
index 0000000000000000000000000000000000000000..83647061c7f59dc8a6e8d033cdb8dc81de648df4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-4e_mot17train_test-mot17train.py
@@ -0,0 +1,11 @@
+_base_ = ['./faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval']
+# data
+data_root = 'data/MOT17/'
+train_dataloader = dict(
+ dataset=dict(ann_file='annotations/train_cocoformat.json'))
+val_dataloader = dict(
+ dataset=dict(ann_file='annotations/train_cocoformat.json'))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(ann_file=data_root + 'annotations/train_cocoformat.json')
+test_evaluator = val_evaluator
diff --git a/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20halftrain_test-mot20halfval.py b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20halftrain_test-mot20halfval.py
new file mode 100644
index 0000000000000000000000000000000000000000..a6d14ad8be2a939bce168f4f09f08dde50f140c8
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20halftrain_test-mot20halfval.py
@@ -0,0 +1,29 @@
+_base_ = ['./faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval']
+model = dict(
+ rpn_head=dict(bbox_coder=dict(clip_border=True)),
+ roi_head=dict(
+ bbox_head=dict(bbox_coder=dict(clip_border=True), num_classes=1)))
+# data
+data_root = 'data/MOT20/'
+train_dataloader = dict(dataset=dict(data_root=data_root))
+val_dataloader = dict(dataset=dict(data_root=data_root))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(ann_file=data_root +
+ 'annotations/half-val_cocoformat.json')
+test_evaluator = val_evaluator
+
+# training schedule for 8e
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=8, val_interval=1)
+
+# learning rate
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.01, by_epoch=False, begin=0, end=100),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=8,
+ by_epoch=True,
+ milestones=[6],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20train_test-mot20train.py b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20train_test-mot20train.py
new file mode 100644
index 0000000000000000000000000000000000000000..85c859732cb3e4742d3003d555f72f4cc7ac2e05
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sort/faster-rcnn_r50_fpn_8xb2-8e_mot20train_test-mot20train.py
@@ -0,0 +1,32 @@
+_base_ = ['./faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval']
+model = dict(
+ rpn_head=dict(bbox_coder=dict(clip_border=True)),
+ roi_head=dict(
+ bbox_head=dict(bbox_coder=dict(clip_border=True), num_classes=1)))
+# data
+data_root = 'data/MOT20/'
+train_dataloader = dict(
+ dataset=dict(
+ data_root=data_root, ann_file='annotations/train_cocoformat.json'))
+val_dataloader = dict(
+ dataset=dict(
+ data_root=data_root, ann_file='annotations/train_cocoformat.json'))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(ann_file=data_root + 'annotations/train_cocoformat.json')
+test_evaluator = val_evaluator
+
+# training schedule for 8e
+train_cfg = dict(type='EpochBasedTrainLoop', max_epochs=8, val_interval=1)
+
+# learning rate
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.01, by_epoch=False, begin=0, end=100),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=8,
+ by_epoch=True,
+ milestones=[6],
+ gamma=0.1)
+]
diff --git a/grounding-dino/mmdetection/configs/sort/metafile.yml b/grounding-dino/mmdetection/configs/sort/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..c582ce353df6344aaa2fe25e0f410bb458e50803
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/sort/metafile.yml
@@ -0,0 +1,35 @@
+Collections:
+ - Name: SORT
+ Metadata:
+ Training Techniques:
+ - SGD with Momentum
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - ResNet
+ - FPN
+ Paper:
+ URL: https://arxiv.org/abs/1602.00763
+ Title: Simple Online and Realtime Tracking
+ README: configs/sort/README.md
+
+Models:
+ - Name: sort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval
+ In Collection: SORT
+ Config: configs/mot/sort/sort_faster-rcnn_r50_fpn_8xb2-4e_mot17halftrain_test-mot17halfval.py
+ Metadata:
+ Training Data: MOT17-half-train
+ inference time (ms/im):
+ - value: 53.8
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (640, 1088)
+ Results:
+ - Task: Multiple Object Tracking
+ Dataset: MOT17-half-val
+ Metrics:
+ MOTA: 62.0
+ IDF1: 57.8
+ HOTA: 52.0
+ Weights: https://download.openmmlab.com/mmtracking/mot/faster_rcnn/faster-rcnn_r50_fpn_4e_mot17-half-64ee2ed4.pth
diff --git a/grounding-dino/mmdetection/configs/tridentnet/README.md b/grounding-dino/mmdetection/configs/tridentnet/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..b972b3a3c9b2de5409af9f76622e8947fd6eace1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/tridentnet/README.md
@@ -0,0 +1,38 @@
+# TridentNet
+
+> [Scale-Aware Trident Networks for Object Detection](https://arxiv.org/abs/1901.01892)
+
+
+
+## Abstract
+
+Scale variation is one of the key challenges in object detection. In this work, we first present a controlled experiment to investigate the effect of receptive fields for scale variation in object detection. Based on the findings from the exploration experiments, we propose a novel Trident Network (TridentNet) aiming to generate scale-specific feature maps with a uniform representational power. We construct a parallel multi-branch architecture in which each branch shares the same transformation parameters but with different receptive fields. Then, we adopt a scale-aware training scheme to specialize each branch by sampling object instances of proper scales for training. As a bonus, a fast approximation version of TridentNet could achieve significant improvements without any additional parameters and computational cost compared with the vanilla detector. On the COCO dataset, our TridentNet with ResNet-101 backbone achieves state-of-the-art single-model results of 48.4 mAP.
+
+
+
+ +
+
+
+## Results and Models
+
+We reports the test results using only one branch for inference.
+
+| Backbone | Style | mstrain | Lr schd | Mem (GB) | Inf time (fps) | box AP | Download |
+| :------: | :---: | :-----: | :-----: | :------: | :------------: | :----: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | caffe | N | 1x | | | 37.7 | [model](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_1x_coco/tridentnet_r50_caffe_1x_coco_20201230_141838-2ec0b530.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_1x_coco/tridentnet_r50_caffe_1x_coco_20201230_141838.log.json) |
+| R-50 | caffe | Y | 1x | | | 37.6 | [model](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_mstrain_1x_coco/tridentnet_r50_caffe_mstrain_1x_coco_20201230_141839-6ce55ccb.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_mstrain_1x_coco/tridentnet_r50_caffe_mstrain_1x_coco_20201230_141839.log.json) |
+| R-50 | caffe | Y | 3x | | | 40.3 | [model](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_mstrain_3x_coco/tridentnet_r50_caffe_mstrain_3x_coco_20201130_100539-46d227ba.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/tridentnet/tridentnet_r50_caffe_mstrain_3x_coco/tridentnet_r50_caffe_mstrain_3x_coco_20201130_100539.log.json) |
+
+**Note**
+
+Similar to [Detectron2](https://github.com/facebookresearch/detectron2/tree/master/projects/TridentNet), we haven't implemented the Scale-aware Training Scheme in section 4.2 of the paper.
+
+## Citation
+
+```latex
+@InProceedings{li2019scale,
+ title={Scale-Aware Trident Networks for Object Detection},
+ author={Li, Yanghao and Chen, Yuntao and Wang, Naiyan and Zhang, Zhaoxiang},
+ journal={The International Conference on Computer Vision (ICCV)},
+ year={2019}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/v3det/README.md b/grounding-dino/mmdetection/configs/v3det/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..36879316f4fe0066707fecb95af4329852fe55fc
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/v3det/README.md
@@ -0,0 +1,86 @@
+
++
+
+#  V3Det: Vast Vocabulary Visual Detection Dataset
+
+
V3Det: Vast Vocabulary Visual Detection Dataset
+
+
+
+
+
+ Jiaqi Wang*,
+ Pan Zhang*,
+ Tao Chu*,
+ Yuhang Cao*,
+ Yujie Zhou,
+ Tong Wu,
+ Bin Wang,
+ Conghui He,
+ Dahua Lin
+ (* equal contribution)
+ Accepted to ICCV 2023 (Oral)
+
+
++
+
+  +
+
+
+
+
+## Abstract
+
+Recent advances in detecting arbitrary objects in the real world are trained and evaluated on object detection datasets with a relatively restricted vocabulary. To facilitate the development of more general visual object detection, we propose V3Det, a vast vocabulary visual detection dataset with precisely annotated bounding boxes on massive images. V3Det has several appealing properties: 1) Vast Vocabulary: It contains bounding boxes of objects from 13,204 categories on real-world images, which is 10 times larger than the existing large vocabulary object detection dataset, e.g., LVIS. 2) Hierarchical Category Organization: The vast vocabulary of V3Det is organized by a hierarchical category tree which annotates the inclusion relationship among categories, encouraging the exploration of category relationships in vast and open vocabulary object detection. 3) Rich Annotations: V3Det comprises precisely annotated objects in 243k images and professional descriptions of each category written by human experts and a powerful chatbot. By offering a vast exploration space, V3Det enables extensive benchmarks on both vast and open vocabulary object detection, leading to new observations, practices, and insights for future research. It has the potential to serve as a cornerstone dataset for developing more general visual perception systems. V3Det is available at https://v3det.openxlab.org.cn/.
+
+## Prepare Dataset
+
+Please download and prepare V3Det Dataset at [V3Det Homepage](https://v3det.openxlab.org.cn/) and [V3Det Github](https://github.com/V3Det/V3Det).
+
+The data includes a training set, a validation set, comprising 13,204 categories. The training set consists of 183,354 images, while the validation set has 29,821 images. The data organization is:
+
+```
+data/
+ V3Det/
+ images/
+
+ +
+
+
+## Introduction
+
+**VarifocalNet (VFNet)** learns to predict the IoU-aware classification score which mixes the object presence confidence and localization accuracy together as the detection score for a bounding box. The learning is supervised by the proposed Varifocal Loss (VFL), based on a new star-shaped bounding box feature representation (the features at nine yellow sampling points). Given the new representation, the object localization accuracy is further improved by refining the initially regressed bounding box. The full paper is available at: [https://arxiv.org/abs/2008.13367](https://arxiv.org/abs/2008.13367).
+
+## Results and Models
+
+| Backbone | Style | DCN | MS train | Lr schd | Inf time (fps) | box AP (val) | box AP (test-dev) | Config | Download |
+| :---------: | :-----: | :-: | :------: | :-----: | :------------: | :----------: | :---------------: | :---------------------------------------------------------: | :------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50 | pytorch | N | N | 1x | - | 41.6 | 41.6 | [config](./vfnet_r50_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_1x_coco/vfnet_r50_fpn_1x_coco_20201027-38db6f58.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_1x_coco/vfnet_r50_fpn_1x_coco.json) |
+| R-50 | pytorch | N | Y | 2x | - | 44.5 | 44.8 | [config](./vfnet_r50_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mstrain_2x_coco/vfnet_r50_fpn_mstrain_2x_coco_20201027-7cc75bd2.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mstrain_2x_coco/vfnet_r50_fpn_mstrain_2x_coco.json) |
+| R-50 | pytorch | Y | Y | 2x | - | 47.8 | 48.0 | [config](./vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-6879c318.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco.json) |
+| R-101 | pytorch | N | N | 1x | - | 43.0 | 43.6 | [config](./vfnet_r101_fpn_1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_1x_coco/vfnet_r101_fpn_1x_coco_20201027pth-c831ece7.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_1x_coco/vfnet_r101_fpn_1x_coco.json) |
+| R-101 | pytorch | N | Y | 2x | - | 46.2 | 46.7 | [config](./vfnet_r101_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mstrain_2x_coco/vfnet_r101_fpn_mstrain_2x_coco_20201027pth-4a5d53f1.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mstrain_2x_coco/vfnet_r101_fpn_mstrain_2x_coco.json) |
+| R-101 | pytorch | Y | Y | 2x | - | 49.0 | 49.2 | [config](./vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-7729adb5.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco.json) |
+| X-101-32x4d | pytorch | Y | Y | 2x | - | 49.7 | 50.0 | [config](./vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-d300a6fc.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco.json) |
+| X-101-64x4d | pytorch | Y | Y | 2x | - | 50.4 | 50.8 | [config](./vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-b5f6da5e.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco.json) |
+
+**Notes:**
+
+- The MS-train scale range is 1333x\[480:960\] (`range` mode) and the inference scale keeps 1333x800.
+- DCN means using `DCNv2` in both backbone and head.
+- Inference time will be updated soon.
+- More results and pre-trained models can be found in [VarifocalNet-Github](https://github.com/hyz-xmaster/VarifocalNet)
+
+## Citation
+
+```latex
+@article{zhang2020varifocalnet,
+ title={VarifocalNet: An IoU-aware Dense Object Detector},
+ author={Zhang, Haoyang and Wang, Ying and Dayoub, Feras and S{\"u}nderhauf, Niko},
+ journal={arXiv preprint arXiv:2008.13367},
+ year={2020}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/vfnet/metafile.yml b/grounding-dino/mmdetection/configs/vfnet/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..1b791d01d50ad8a28bff225fa1d3f5af8d348207
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/metafile.yml
@@ -0,0 +1,116 @@
+Collections:
+ - Name: VFNet
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ - Varifocal Loss
+ Paper:
+ URL: https://arxiv.org/abs/2008.13367
+ Title: 'VarifocalNet: An IoU-aware Dense Object Detector'
+ README: configs/vfnet/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.6.0/mmdet/models/detectors/vfnet.py#L6
+ Version: v2.6.0
+
+Models:
+ - Name: vfnet_r50_fpn_1x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r50_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 41.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_1x_coco/vfnet_r50_fpn_1x_coco_20201027-38db6f58.pth
+
+ - Name: vfnet_r50_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r50_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 44.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mstrain_2x_coco/vfnet_r50_fpn_mstrain_2x_coco_20201027-7cc75bd2.pth
+
+ - Name: vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 48.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r50_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-6879c318.pth
+
+ - Name: vfnet_r101_fpn_1x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r101_fpn_1x_coco.py
+ Metadata:
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 43.6
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_1x_coco/vfnet_r101_fpn_1x_coco_20201027pth-c831ece7.pth
+
+ - Name: vfnet_r101_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r101_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 46.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mstrain_2x_coco/vfnet_r101_fpn_mstrain_2x_coco_20201027pth-4a5d53f1.pth
+
+ - Name: vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_r101_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-7729adb5.pth
+
+ - Name: vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_32x4d_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-d300a6fc.pth
+
+ - Name: vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco
+ In Collection: VFNet
+ Config: configs/vfnet/vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
+ Metadata:
+ Epochs: 24
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/vfnet/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco/vfnet_x101_64x4d_fpn_mdconv_c3-c5_mstrain_2x_coco_20201027pth-b5f6da5e.pth
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2dd67a3bcce3bbb66531997133880d65af0c856a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101-mdconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNet',
+ depth=101,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b296a07959e43517d792f36f356404a232fb0dc3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_1x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './vfnet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..37a7bacb5e409a75ae2cd71fc022837f09537aa7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_2x_coco.py
@@ -0,0 +1,20 @@
+_base_ = './vfnet_r50_fpn_1x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..62f064b7473f4e6fec3ac50962240ac1f828753f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r101_fpn_ms-2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './vfnet_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..08adf927599b7759dea0e2d14c37ce716482b301
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,6 @@
+_base_ = './vfnet_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True)),
+ bbox_head=dict(dcn_on_last_conv=True))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_1x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..99bc3b5f4c78c7a7cda11e20f209ea40af7dfd80
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_1x_coco.py
@@ -0,0 +1,104 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(
+ type='VFNet',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_output', # use P5
+ num_outs=5,
+ relu_before_extra_convs=True),
+ bbox_head=dict(
+ type='VFNetHead',
+ num_classes=80,
+ in_channels=256,
+ stacked_convs=3,
+ feat_channels=256,
+ strides=[8, 16, 32, 64, 128],
+ center_sampling=False,
+ dcn_on_last_conv=False,
+ use_atss=True,
+ use_vfl=True,
+ loss_cls=dict(
+ type='VarifocalLoss',
+ use_sigmoid=True,
+ alpha=0.75,
+ gamma=2.0,
+ iou_weighted=True,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.5),
+ loss_bbox_refine=dict(type='GIoULoss', loss_weight=2.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(type='ATSSAssigner', topk=9),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+
+# data setting
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.01),
+ paramwise_cfg=dict(bias_lr_mult=2., bias_decay_mult=0.),
+ clip_grad=None)
+# learning rate
+max_epochs = 12
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..0f8eed298e81967582420ac45a241b2726c47f6a
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_r50_fpn_ms-2x_coco.py
@@ -0,0 +1,36 @@
+_base_ = './vfnet_r50_fpn_1x_coco.py'
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='RandomResize', scale=[(1333, 480), (1333, 960)],
+ keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+# learning policy
+max_epochs = 24
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[16, 22],
+ gamma=0.1)
+]
+
+train_cfg = dict(max_epochs=max_epochs)
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net-101_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net-101_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..94288e8e80e5be2c6e8effd38e30e239cd1e3c5f
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net-101_fpn_ms-2x_coco.py
@@ -0,0 +1,16 @@
+_base_ = './vfnet_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net101-mdconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net101-mdconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..269330d3d8c218e51c3e65b550e4afc3296f2ec4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_res2net101-mdconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,18 @@
+_base_ = './vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='Res2Net',
+ depth=101,
+ scales=4,
+ base_width=26,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://res2net101_v1d_26w_4s')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..465da0cbdf4c4ae34d648349f4f9fa2d3fb13fe6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..486bcfe5ebd85f8c4ac3b211694e7dd9d13aa302
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-32x4d_fpn_ms-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './vfnet_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=32,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_32x4d')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..14a070e73ff54d6833aced096e2d94da4171ca42
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d-mdconv-c3-c5_fpn_ms-2x_coco.py
@@ -0,0 +1,17 @@
+_base_ = './vfnet_r50-mdconv-c3-c5_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ dcn=dict(type='DCNv2', deform_groups=1, fallback_on_stride=False),
+ stage_with_dcn=(False, True, True, True),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d_fpn_ms-2x_coco.py b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d_fpn_ms-2x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..92e3f71df6818a5653ec9c0475c277d89a1adb47
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/vfnet/vfnet_x101-64x4d_fpn_ms-2x_coco.py
@@ -0,0 +1,15 @@
+_base_ = './vfnet_r50_fpn_ms-2x_coco.py'
+model = dict(
+ backbone=dict(
+ type='ResNeXt',
+ depth=101,
+ groups=64,
+ base_width=4,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=True,
+ style='pytorch',
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://resnext101_64x4d')))
diff --git a/grounding-dino/mmdetection/configs/wider_face/README.md b/grounding-dino/mmdetection/configs/wider_face/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..1904506c64a893f2bfd3881c7e95bd7100fcc6f4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/wider_face/README.md
@@ -0,0 +1,57 @@
+# WIDER FACE
+
+> [WIDER FACE: A Face Detection Benchmark](https://arxiv.org/abs/1511.06523)
+
+
+
+## Abstract
+
+Face detection is one of the most studied topics in the computer vision community. Much of the progresses have been made by the availability of face detection benchmark datasets. We show that there is a gap between current face detection performance and the real world requirements. To facilitate future face detection research, we introduce the WIDER FACE dataset, which is 10 times larger than existing datasets. The dataset contains rich annotations, including occlusions, poses, event categories, and face bounding boxes. Faces in the proposed dataset are extremely challenging due to large variations in scale, pose and occlusion, as shown in Fig. 1. Furthermore, we show that WIDER FACE dataset is an effective training source for face detection. We benchmark several representative detection systems, providing an overview of state-of-the-art performance and propose a solution to deal with large scale variation. Finally, we discuss common failure cases that worth to be further investigated.
+
+
+
+ +
+
+
+## Introduction
+
+To use the WIDER Face dataset you need to download it
+and extract to the `data/WIDERFace` folder. Annotation in the VOC format
+can be found in this [repo](https://github.com/sovrasov/wider-face-pascal-voc-annotations.git).
+You should move the annotation files from `WIDER_train_annotations` and `WIDER_val_annotations` folders
+to the `Annotation` folders inside the corresponding directories `WIDER_train` and `WIDER_val`.
+Also annotation lists `val.txt` and `train.txt` should be copied to `data/WIDERFace` from `WIDER_train_annotations` and `WIDER_val_annotations`.
+The directory should be like this:
+
+```
+mmdetection
+├── mmdet
+├── tools
+├── configs
+├── data
+│ ├── WIDERFace
+│ │ ├── WIDER_train
+│ | │ ├──0--Parade
+│ | │ ├── ...
+│ | │ ├── Annotations
+│ │ ├── WIDER_val
+│ | │ ├──0--Parade
+│ | │ ├── ...
+│ | │ ├── Annotations
+│ │ ├── val.txt
+│ │ ├── train.txt
+
+```
+
+After that you can train the SSD300 on WIDER by launching training with the `ssd300_wider_face.py` config or
+create your own config based on the presented one.
+
+## Citation
+
+```latex
+@inproceedings{yang2016wider,
+ Author = {Yang, Shuo and Luo, Ping and Loy, Chen Change and Tang, Xiaoou},
+ Booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
+ Title = {WIDER FACE: A Face Detection Benchmark},
+ Year = {2016}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/wider_face/retinanet_r50_fpn_1x_widerface.py b/grounding-dino/mmdetection/configs/wider_face/retinanet_r50_fpn_1x_widerface.py
new file mode 100644
index 0000000000000000000000000000000000000000..78067255f8f69f9d193e8d3ae2fe8a685e4defe1
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/wider_face/retinanet_r50_fpn_1x_widerface.py
@@ -0,0 +1,10 @@
+_base_ = [
+ '../_base_/models/retinanet_r50_fpn.py',
+ '../_base_/datasets/wider_face.py', '../_base_/schedules/schedule_1x.py',
+ '../_base_/default_runtime.py'
+]
+# model settings
+model = dict(bbox_head=dict(num_classes=1))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
diff --git a/grounding-dino/mmdetection/configs/wider_face/ssd300_8xb32-24e_widerface.py b/grounding-dino/mmdetection/configs/wider_face/ssd300_8xb32-24e_widerface.py
new file mode 100644
index 0000000000000000000000000000000000000000..02c3c927f78ff022b03bf180789ce91d6061ec9e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/wider_face/ssd300_8xb32-24e_widerface.py
@@ -0,0 +1,64 @@
+_base_ = [
+ '../_base_/models/ssd300.py', '../_base_/datasets/wider_face.py',
+ '../_base_/default_runtime.py', '../_base_/schedules/schedule_2x.py'
+]
+model = dict(bbox_head=dict(num_classes=1))
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(
+ type='Expand',
+ mean={{_base_.model.data_preprocessor.mean}},
+ to_rgb={{_base_.model.data_preprocessor.bgr_to_rgb}},
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(300, 300), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=_base_.backend_args),
+ dict(type='Resize', scale=(300, 300), keep_ratio=False),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+dataset_type = 'WIDERFaceDataset'
+data_root = 'data/WIDERFace/'
+train_dataloader = dict(
+ batch_size=32, num_workers=8, dataset=dict(pipeline=train_pipeline))
+
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0,
+ end=1000),
+ dict(type='MultiStepLR', by_epoch=True, milestones=[16, 20], gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(lr=0.012, momentum=0.9, weight_decay=5e-4),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (32 samples per GPU)
+auto_scale_lr = dict(base_batch_size=256)
diff --git a/grounding-dino/mmdetection/configs/yolact/README.md b/grounding-dino/mmdetection/configs/yolact/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e884ad65e7181503efd129e7444391e7ea8e2e51
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolact/README.md
@@ -0,0 +1,75 @@
+# YOLACT
+
+> [YOLACT: Real-time Instance Segmentation](https://arxiv.org/abs/1904.02689)
+
+
+
+## Abstract
+
+We present a simple, fully-convolutional model for real-time instance segmentation that achieves 29.8 mAP on MS COCO at 33.5 fps evaluated on a single Titan Xp, which is significantly faster than any previous competitive approach. Moreover, we obtain this result after training on only one GPU. We accomplish this by breaking instance segmentation into two parallel subtasks: (1) generating a set of prototype masks and (2) predicting per-instance mask coefficients. Then we produce instance masks by linearly combining the prototypes with the mask coefficients. We find that because this process doesn't depend on repooling, this approach produces very high-quality masks and exhibits temporal stability for free. Furthermore, we analyze the emergent behavior of our prototypes and show they learn to localize instances on their own in a translation variant manner, despite being fully-convolutional. Finally, we also propose Fast NMS, a drop-in 12 ms faster replacement for standard NMS that only has a marginal performance penalty.
+
+
+
+ +
+
+
+## Introduction
+
+A simple, fully convolutional model for real-time instance segmentation. This is the code for our paper:
+
+- [YOLACT: Real-time Instance Segmentation](https://arxiv.org/abs/1904.02689)
+
+
+
+For a real-time demo, check out our ICCV video:
+[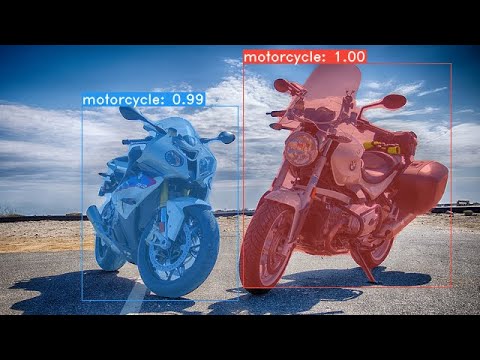](https://www.youtube.com/watch?v=0pMfmo8qfpQ)
+
+## Evaluation
+
+Here are our YOLACT models along with their FPS on a Titan Xp and mAP on COCO's `val`:
+
+| Image Size | GPU x BS | Backbone | \*FPS | mAP | Weights | Configs | Download |
+| :--------: | :------: | :-----------: | :---: | :--: | :-----: | :--------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------: |
+| 550 | 1x8 | Resnet50-FPN | 42.5 | 29.0 | | [config](./yolact_r50_1xb8-55e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r50_1x8_coco/yolact_r50_1x8_coco_20200908-f38d58df.pth) |
+| 550 | 8x8 | Resnet50-FPN | 42.5 | 28.4 | | [config](./yolact_r50_8xb8-55e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r50_8x8_coco/yolact_r50_8x8_coco_20200908-ca34f5db.pth) |
+| 550 | 1x8 | Resnet101-FPN | 33.5 | 30.4 | | [config](./yolact_r101_1xb8-55e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r101_1x8_coco/yolact_r101_1x8_coco_20200908-4cbe9101.pth) |
+
+\*Note: The FPS is evaluated by the [original implementation](https://github.com/dbolya/yolact). When calculating FPS, only the model inference time is taken into account. Data loading and post-processing operations such as converting masks to RLE code, generating COCO JSON results, image rendering are not included.
+
+## Training
+
+All the aforementioned models are trained with a single GPU. It typically takes ~12GB VRAM when using resnet-101 as the backbone. If you want to try multiple GPUs training, you may have to modify the configuration files accordingly, such as adjusting the training schedule and freezing batch norm.
+
+```Shell
+# Trains using the resnet-101 backbone with a batch size of 8 on a single GPU.
+./tools/dist_train.sh configs/yolact/yolact_r101.py 1
+```
+
+## Testing
+
+Please refer to [mmdetection/docs/getting_started.md](https://mmdetection.readthedocs.io/en/latest/1_exist_data_model.html#test-existing-models).
+
+## Citation
+
+If you use YOLACT or this code base in your work, please cite
+
+```latex
+@inproceedings{yolact-iccv2019,
+ author = {Daniel Bolya and Chong Zhou and Fanyi Xiao and Yong Jae Lee},
+ title = {YOLACT: {Real-time} Instance Segmentation},
+ booktitle = {ICCV},
+ year = {2019},
+}
+```
+
+
diff --git a/grounding-dino/mmdetection/configs/yolact/metafile.yml b/grounding-dino/mmdetection/configs/yolact/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..9ca76b3d3910f497e97275d0f25b1b1c3062d12b
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolact/metafile.yml
@@ -0,0 +1,81 @@
+Collections:
+ - Name: YOLACT
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - FPN
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/1904.02689
+ Title: 'YOLACT: Real-time Instance Segmentation'
+ README: configs/yolact/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.5.0/mmdet/models/detectors/yolact.py#L9
+ Version: v2.5.0
+
+Models:
+ - Name: yolact_r50_1x8_coco
+ In Collection: YOLACT
+ Config: configs/yolact/yolact_r50_1xb8-55e_coco.py
+ Metadata:
+ Training Resources: 1x V100 GPU
+ Batch Size: 8
+ Epochs: 55
+ inference time (ms/im):
+ - value: 23.53
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (550, 550)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 29.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r50_1x8_coco/yolact_r50_1x8_coco_20200908-f38d58df.pth
+
+ - Name: yolact_r50_8x8_coco
+ In Collection: YOLACT
+ Config: configs/yolact/yolact_r50_8xb8-55e_coco.py
+ Metadata:
+ Batch Size: 64
+ Epochs: 55
+ inference time (ms/im):
+ - value: 23.53
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (550, 550)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 28.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r50_8x8_coco/yolact_r50_8x8_coco_20200908-ca34f5db.pth
+
+ - Name: yolact_r101_1x8_coco
+ In Collection: YOLACT
+ Config: configs/yolact/yolact_r101_1xb8-55e_coco.py
+ Metadata:
+ Training Resources: 1x V100 GPU
+ Batch Size: 8
+ Epochs: 55
+ inference time (ms/im):
+ - value: 29.85
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (550, 550)
+ Results:
+ - Task: Instance Segmentation
+ Dataset: COCO
+ Metrics:
+ mask AP: 30.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolact/yolact_r101_1x8_coco/yolact_r101_1x8_coco_20200908-4cbe9101.pth
diff --git a/grounding-dino/mmdetection/configs/yolact/yolact_r101_1xb8-55e_coco.py b/grounding-dino/mmdetection/configs/yolact/yolact_r101_1xb8-55e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e6ffe29627ff5bd24b8e53be8d7defaa9eb91df7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolact/yolact_r101_1xb8-55e_coco.py
@@ -0,0 +1,7 @@
+_base_ = './yolact_r50_1xb8-55e_coco.py'
+
+model = dict(
+ backbone=dict(
+ depth=101,
+ init_cfg=dict(type='Pretrained',
+ checkpoint='torchvision://resnet101')))
diff --git a/grounding-dino/mmdetection/configs/yolact/yolact_r50_1xb8-55e_coco.py b/grounding-dino/mmdetection/configs/yolact/yolact_r50_1xb8-55e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..b7dabf1548a733cbf18b8007ae2fa9033a340af6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolact/yolact_r50_1xb8-55e_coco.py
@@ -0,0 +1,170 @@
+_base_ = [
+ '../_base_/datasets/coco_instance.py', '../_base_/default_runtime.py'
+]
+img_norm_cfg = dict(
+ mean=[123.68, 116.78, 103.94], std=[58.40, 57.12, 57.38], to_rgb=True)
+# model settings
+input_size = 550
+model = dict(
+ type='YOLACT',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=img_norm_cfg['mean'],
+ std=img_norm_cfg['std'],
+ bgr_to_rgb=img_norm_cfg['to_rgb'],
+ pad_mask=True),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(0, 1, 2, 3),
+ frozen_stages=-1, # do not freeze stem
+ norm_cfg=dict(type='BN', requires_grad=True),
+ norm_eval=False, # update the statistics of bn
+ zero_init_residual=False,
+ style='pytorch',
+ init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
+ neck=dict(
+ type='FPN',
+ in_channels=[256, 512, 1024, 2048],
+ out_channels=256,
+ start_level=1,
+ add_extra_convs='on_input',
+ num_outs=5,
+ upsample_cfg=dict(mode='bilinear')),
+ bbox_head=dict(
+ type='YOLACTHead',
+ num_classes=80,
+ in_channels=256,
+ feat_channels=256,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ octave_base_scale=3,
+ scales_per_octave=1,
+ base_sizes=[8, 16, 32, 64, 128],
+ ratios=[0.5, 1.0, 2.0],
+ strides=[550.0 / x for x in [69, 35, 18, 9, 5]],
+ centers=[(550 * 0.5 / x, 550 * 0.5 / x)
+ for x in [69, 35, 18, 9, 5]]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[0.1, 0.1, 0.2, 0.2]),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=False,
+ reduction='none',
+ loss_weight=1.0),
+ loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.5),
+ num_head_convs=1,
+ num_protos=32,
+ use_ohem=True),
+ mask_head=dict(
+ type='YOLACTProtonet',
+ in_channels=256,
+ num_protos=32,
+ num_classes=80,
+ max_masks_to_train=100,
+ loss_mask_weight=6.125,
+ with_seg_branch=True,
+ loss_segm=dict(
+ type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='MaxIoUAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.4,
+ min_pos_iou=0.,
+ ignore_iof_thr=-1,
+ gt_max_assign_all=False),
+ sampler=dict(type='PseudoSampler'), # YOLACT should use PseudoSampler
+ # smoothl1_beta=1.,
+ allowed_border=-1,
+ pos_weight=-1,
+ neg_pos_ratio=3,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ mask_thr=0.5,
+ iou_thr=0.5,
+ top_k=200,
+ max_per_img=100,
+ mask_thr_binary=0.5))
+# dataset settings
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(4.0, 4.0)),
+ dict(
+ type='Expand',
+ mean=img_norm_cfg['mean'],
+ to_rgb=img_norm_cfg['to_rgb'],
+ ratio_range=(1, 4)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='RandomFlip', prob=0.5),
+ dict(
+ type='PhotoMetricDistortion',
+ brightness_delta=32,
+ contrast_range=(0.5, 1.5),
+ saturation_range=(0.5, 1.5),
+ hue_delta=18),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(input_size, input_size), keep_ratio=False),
+ dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ batch_sampler=None,
+ dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+max_epochs = 55
+# training schedule for 55e
+train_cfg = dict(
+ type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=1)
+val_cfg = dict(type='ValLoop')
+test_cfg = dict(type='TestLoop')
+
+# learning rate
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 42, 49, 52],
+ gamma=0.1)
+]
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=1e-3, momentum=0.9, weight_decay=5e-4))
+
+custom_hooks = [
+ dict(type='CheckInvalidLossHook', interval=50, priority='VERY_LOW')
+]
+
+env_cfg = dict(cudnn_benchmark=True)
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (1 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=8)
diff --git a/grounding-dino/mmdetection/configs/yolact/yolact_r50_8xb8-55e_coco.py b/grounding-dino/mmdetection/configs/yolact/yolact_r50_8xb8-55e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..e39c285da10ef4821343ebf3c0d0d4c094a97198
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolact/yolact_r50_8xb8-55e_coco.py
@@ -0,0 +1,23 @@
+_base_ = 'yolact_r50_1xb8-55e_coco.py'
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(lr=8e-3),
+ clip_grad=dict(max_norm=35, norm_type=2))
+# learning rate
+max_epochs = 55
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=1000),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=max_epochs,
+ by_epoch=True,
+ milestones=[20, 42, 49, 52],
+ gamma=0.1)
+]
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/yolo/README.md b/grounding-dino/mmdetection/configs/yolo/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..9cb47bcc81a1221dcb4a31b278e7bd62eebf1307
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/README.md
@@ -0,0 +1,55 @@
+# YOLOv3
+
+> [YOLOv3: An Incremental Improvement](https://arxiv.org/abs/1804.02767)
+
+
+
+## Abstract
+
+We present some updates to YOLO! We made a bunch of little design changes to make it better. We also trained this new network that's pretty swell. It's a little bigger than last time but more accurate. It's still fast though, don't worry. At 320x320 YOLOv3 runs in 22 ms at 28.2 mAP, as accurate as SSD but three times faster. When we look at the old .5 IOU mAP detection metric YOLOv3 is quite good. It achieves 57.9 mAP@50 in 51 ms on a Titan X, compared to 57.5 mAP@50 in 198 ms by RetinaNet, similar performance but 3.8x faster.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Scale | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :--------: | :---: | :-----: | :------: | :------------: | :----: | :---------------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| DarkNet-53 | 320 | 273e | 2.7 | 63.9 | 27.9 | [config](./yolov3_d53_8xb8-320-273e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_320_273e_coco/yolov3_d53_320_273e_coco-421362b6.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_320_273e_coco/yolov3_d53_320_273e_coco-20200819_172101.log.json) |
+| DarkNet-53 | 416 | 273e | 3.8 | 61.2 | 30.9 | [config](./yolov3_d53_8xb8-ms-416-273e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-416_273e_coco/yolov3_d53_mstrain-416_273e_coco-2b60fcd9.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-416_273e_coco/yolov3_d53_mstrain-416_273e_coco-20200819_173424.log.json) |
+| DarkNet-53 | 608 | 273e | 7.4 | 48.1 | 33.7 | [config](./yolov3_d53_8xb8-ms-608-273e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-608_273e_coco/yolov3_d53_mstrain-608_273e_coco_20210518_115020-a2c3acb8.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-608_273e_coco/yolov3_d53_mstrain-608_273e_coco_20210518_115020.log.json) |
+
+## Mixed Precision Training
+
+We also train YOLOv3 with mixed precision training.
+
+| Backbone | Scale | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :--------: | :---: | :-----: | :------: | :------------: | :----: | :-------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| DarkNet-53 | 608 | 273e | 4.7 | 48.1 | 33.8 | [config](./yolov3_d53_8xb8-amp-ms-608-273e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_fp16_mstrain-608_273e_coco/yolov3_d53_fp16_mstrain-608_273e_coco_20210517_213542-4bc34944.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_fp16_mstrain-608_273e_coco/yolov3_d53_fp16_mstrain-608_273e_coco_20210517_213542.log.json) |
+
+## Lightweight models
+
+| Backbone | Scale | Lr schd | Mem (GB) | Inf time (fps) | box AP | Config | Download |
+| :---------: | :---: | :-----: | :------: | :------------: | :----: | :------------------------------------------------------: | :----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| MobileNetV2 | 416 | 300e | 5.3 | | 23.9 | [config](./yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_mstrain-416_300e_coco/yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_mstrain-416_300e_coco/yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823.log.json) |
+| MobileNetV2 | 320 | 300e | 3.2 | | 22.2 | [config](./yolov3_mobilenetv2_8xb24-320-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_320_300e_coco/yolov3_mobilenetv2_320_300e_coco_20210719_215349-d18dff72.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_320_300e_coco/yolov3_mobilenetv2_320_300e_coco_20210719_215349.log.json) |
+
+Notice: We reduce the number of channels to 96 in both head and neck. It can reduce the flops and parameters, which makes these models more suitable for edge devices.
+
+## Credit
+
+This implementation originates from the project of Haoyu Wu(@wuhy08) at Western Digital.
+
+## Citation
+
+```latex
+@misc{redmon2018yolov3,
+ title={YOLOv3: An Incremental Improvement},
+ author={Joseph Redmon and Ali Farhadi},
+ year={2018},
+ eprint={1804.02767},
+ archivePrefix={arXiv},
+ primaryClass={cs.CV}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/yolo/metafile.yml b/grounding-dino/mmdetection/configs/yolo/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..627e70c4d368728d3632f4fda6b68475c3a0fa66
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/metafile.yml
@@ -0,0 +1,124 @@
+Collections:
+ - Name: YOLOv3
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - DarkNet
+ Paper:
+ URL: https://arxiv.org/abs/1804.02767
+ Title: 'YOLOv3: An Incremental Improvement'
+ README: configs/yolo/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.4.0/mmdet/models/detectors/yolo.py#L8
+ Version: v2.4.0
+
+Models:
+ - Name: yolov3_d53_320_273e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_d53_8xb8-320-273e_coco.py
+ Metadata:
+ Training Memory (GB): 2.7
+ inference time (ms/im):
+ - value: 15.65
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (320, 320)
+ Epochs: 273
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 27.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_320_273e_coco/yolov3_d53_320_273e_coco-421362b6.pth
+
+ - Name: yolov3_d53_mstrain-416_273e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_d53_8xb8-ms-416-273e_coco.py
+ Metadata:
+ Training Memory (GB): 3.8
+ inference time (ms/im):
+ - value: 16.34
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (416, 416)
+ Epochs: 273
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 30.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-416_273e_coco/yolov3_d53_mstrain-416_273e_coco-2b60fcd9.pth
+
+ - Name: yolov3_d53_mstrain-608_273e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_d53_8xb8-ms-608-273e_coco.py
+ Metadata:
+ Training Memory (GB): 7.4
+ inference time (ms/im):
+ - value: 20.79
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP32
+ resolution: (608, 608)
+ Epochs: 273
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 33.7
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_mstrain-608_273e_coco/yolov3_d53_mstrain-608_273e_coco_20210518_115020-a2c3acb8.pth
+
+ - Name: yolov3_d53_fp16_mstrain-608_273e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_d53_8xb8-amp-ms-608-273e_coco.py
+ Metadata:
+ Training Memory (GB): 4.7
+ inference time (ms/im):
+ - value: 20.79
+ hardware: V100
+ backend: PyTorch
+ batch size: 1
+ mode: FP16
+ resolution: (608, 608)
+ Epochs: 273
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 33.8
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_d53_fp16_mstrain-608_273e_coco/yolov3_d53_fp16_mstrain-608_273e_coco_20210517_213542-4bc34944.pth
+
+ - Name: yolov3_mobilenetv2_8xb24-320-300e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_mobilenetv2_8xb24-320-300e_coco.py
+ Metadata:
+ Training Memory (GB): 3.2
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 22.2
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_320_300e_coco/yolov3_mobilenetv2_320_300e_coco_20210719_215349-d18dff72.pth
+
+ - Name: yolov3_mobilenetv2_8xb24-ms-416-300e_coco
+ In Collection: YOLOv3
+ Config: configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py
+ Metadata:
+ Training Memory (GB): 5.3
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 23.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolo/yolov3_mobilenetv2_mstrain-416_300e_coco/yolov3_mobilenetv2_mstrain-416_300e_coco_20210718_010823-f68a07b3.pth
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-320-273e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-320-273e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..a3d08dd7706e5ba5bec5fc9e8da6fab120ed813d
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-320-273e_coco.py
@@ -0,0 +1,29 @@
+_base_ = './yolov3_d53_8xb8-ms-608-273e_coco.py'
+
+input_size = (320, 320)
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ # `mean` and `to_rgb` should be the same with the `preprocess_cfg`
+ dict(type='Expand', mean=[0, 0, 0], to_rgb=True, ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=input_size, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=input_size, keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-amp-ms-608-273e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-amp-ms-608-273e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..173d8ee22227b3c3f4aa0488cb4e6f131d7dbee4
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-amp-ms-608-273e_coco.py
@@ -0,0 +1,3 @@
+_base_ = './yolov3_d53_8xb8-ms-608-273e_coco.py'
+# fp16 settings
+optim_wrapper = dict(type='AmpOptimWrapper', loss_scale='dynamic')
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-416-273e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-416-273e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..ca0127e83edaeb8d5851ed089f6bd6d7385a1f86
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-416-273e_coco.py
@@ -0,0 +1,28 @@
+_base_ = './yolov3_d53_8xb8-ms-608-273e_coco.py'
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ # `mean` and `to_rgb` should be the same with the `preprocess_cfg`
+ dict(type='Expand', mean=[0, 0, 0], to_rgb=True, ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='RandomResize', scale=[(320, 320), (416, 416)], keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(416, 416), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-608-273e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-608-273e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d4a36dfdaaf9b9e013882a6c28d42cca5942be20
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_d53_8xb8-ms-608-273e_coco.py
@@ -0,0 +1,167 @@
+_base_ = ['../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py']
+# model settings
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[0, 0, 0],
+ std=[255., 255., 255.],
+ bgr_to_rgb=True,
+ pad_size_divisor=32)
+model = dict(
+ type='YOLOV3',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='Darknet',
+ depth=53,
+ out_indices=(3, 4, 5),
+ init_cfg=dict(type='Pretrained', checkpoint='open-mmlab://darknet53')),
+ neck=dict(
+ type='YOLOV3Neck',
+ num_scales=3,
+ in_channels=[1024, 512, 256],
+ out_channels=[512, 256, 128]),
+ bbox_head=dict(
+ type='YOLOV3Head',
+ num_classes=80,
+ in_channels=[512, 256, 128],
+ out_channels=[1024, 512, 256],
+ anchor_generator=dict(
+ type='YOLOAnchorGenerator',
+ base_sizes=[[(116, 90), (156, 198), (373, 326)],
+ [(30, 61), (62, 45), (59, 119)],
+ [(10, 13), (16, 30), (33, 23)]],
+ strides=[32, 16, 8]),
+ bbox_coder=dict(type='YOLOBBoxCoder'),
+ featmap_strides=[32, 16, 8],
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_conf=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_xy=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=2.0,
+ reduction='sum'),
+ loss_wh=dict(type='MSELoss', loss_weight=2.0, reduction='sum')),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='GridAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0)),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ conf_thr=0.005,
+ nms=dict(type='nms', iou_threshold=0.45),
+ max_per_img=100))
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='Expand',
+ mean=data_preprocessor['mean'],
+ to_rgb=data_preprocessor['bgr_to_rgb'],
+ ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='RandomResize', scale=[(320, 320), (608, 608)], keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(608, 608), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args))
+val_dataloader = dict(
+ batch_size=1,
+ num_workers=2,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+train_cfg = dict(max_epochs=273, val_interval=7)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.001, momentum=0.9, weight_decay=0.0005),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning policy
+param_scheduler = [
+ dict(type='LinearLR', start_factor=0.1, by_epoch=False, begin=0, end=2000),
+ dict(type='MultiStepLR', by_epoch=True, milestones=[218, 246], gamma=0.1)
+]
+
+default_hooks = dict(checkpoint=dict(type='CheckpointHook', interval=7))
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-320-300e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-320-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..07b393734329fd3ed5f4bd11fbc15b4abf7846bb
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-320-300e_coco.py
@@ -0,0 +1,42 @@
+_base_ = ['./yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py']
+
+# yapf:disable
+model = dict(
+ bbox_head=dict(
+ anchor_generator=dict(
+ base_sizes=[[(220, 125), (128, 222), (264, 266)],
+ [(35, 87), (102, 96), (60, 170)],
+ [(10, 15), (24, 36), (72, 42)]])))
+# yapf:enable
+
+input_size = (320, 320)
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ # `mean` and `to_rgb` should be the same with the `preprocess_cfg`
+ dict(
+ type='Expand',
+ mean=[123.675, 116.28, 103.53],
+ to_rgb=True,
+ ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='Resize', scale=input_size, keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=input_size, keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(dataset=dict(dataset=dict(pipeline=train_pipeline)))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py b/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..9a161b66fe92666e904a9580ab5a1ff16d630ab7
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolo/yolov3_mobilenetv2_8xb24-ms-416-300e_coco.py
@@ -0,0 +1,176 @@
+_base_ = ['../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py']
+# model settings
+data_preprocessor = dict(
+ type='DetDataPreprocessor',
+ mean=[123.675, 116.28, 103.53],
+ std=[58.395, 57.12, 57.375],
+ bgr_to_rgb=True,
+ pad_size_divisor=32)
+model = dict(
+ type='YOLOV3',
+ data_preprocessor=data_preprocessor,
+ backbone=dict(
+ type='MobileNetV2',
+ out_indices=(2, 4, 6),
+ act_cfg=dict(type='LeakyReLU', negative_slope=0.1),
+ init_cfg=dict(
+ type='Pretrained', checkpoint='open-mmlab://mmdet/mobilenet_v2')),
+ neck=dict(
+ type='YOLOV3Neck',
+ num_scales=3,
+ in_channels=[320, 96, 32],
+ out_channels=[96, 96, 96]),
+ bbox_head=dict(
+ type='YOLOV3Head',
+ num_classes=80,
+ in_channels=[96, 96, 96],
+ out_channels=[96, 96, 96],
+ anchor_generator=dict(
+ type='YOLOAnchorGenerator',
+ base_sizes=[[(116, 90), (156, 198), (373, 326)],
+ [(30, 61), (62, 45), (59, 119)],
+ [(10, 13), (16, 30), (33, 23)]],
+ strides=[32, 16, 8]),
+ bbox_coder=dict(type='YOLOBBoxCoder'),
+ featmap_strides=[32, 16, 8],
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_conf=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=1.0,
+ reduction='sum'),
+ loss_xy=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ loss_weight=2.0,
+ reduction='sum'),
+ loss_wh=dict(type='MSELoss', loss_weight=2.0, reduction='sum')),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='GridAssigner',
+ pos_iou_thr=0.5,
+ neg_iou_thr=0.5,
+ min_pos_iou=0)),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ conf_thr=0.005,
+ nms=dict(type='nms', iou_threshold=0.45),
+ max_per_img=100))
+# dataset settings
+dataset_type = 'CocoDataset'
+data_root = 'data/coco/'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='Expand',
+ mean=data_preprocessor['mean'],
+ to_rgb=data_preprocessor['bgr_to_rgb'],
+ ratio_range=(1, 2)),
+ dict(
+ type='MinIoURandomCrop',
+ min_ious=(0.4, 0.5, 0.6, 0.7, 0.8, 0.9),
+ min_crop_size=0.3),
+ dict(type='RandomResize', scale=[(320, 320), (416, 416)], keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='PhotoMetricDistortion'),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=(416, 416), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=24,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ batch_sampler=dict(type='AspectRatioBatchSampler'),
+ dataset=dict(
+ type='RepeatDataset', # use RepeatDataset to speed up training
+ times=10,
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ filter_cfg=dict(filter_empty_gt=True, min_size=32),
+ pipeline=train_pipeline,
+ backend_args=backend_args)))
+val_dataloader = dict(
+ batch_size=24,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+train_cfg = dict(max_epochs=30)
+
+# optimizer
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(type='SGD', lr=0.003, momentum=0.9, weight_decay=0.0005),
+ clip_grad=dict(max_norm=35, norm_type=2))
+
+# learning policy
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=0.0001,
+ by_epoch=False,
+ begin=0,
+ end=4000),
+ dict(type='MultiStepLR', by_epoch=True, milestones=[24, 28], gamma=0.1)
+]
+
+find_unused_parameters = True
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (24 samples per GPU)
+auto_scale_lr = dict(base_batch_size=192)
diff --git a/grounding-dino/mmdetection/configs/yolof/README.md b/grounding-dino/mmdetection/configs/yolof/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..b9167f6e6e34a64022b82b212e4bc81808dc3395
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolof/README.md
@@ -0,0 +1,35 @@
+# YOLOF
+
+> [You Only Look One-level Feature](https://arxiv.org/abs/2103.09460)
+
+
+
+## Abstract
+
+This paper revisits feature pyramids networks (FPN) for one-stage detectors and points out that the success of FPN is due to its divide-and-conquer solution to the optimization problem in object detection rather than multi-scale feature fusion. From the perspective of optimization, we introduce an alternative way to address the problem instead of adopting the complex feature pyramids - {\\em utilizing only one-level feature for detection}. Based on the simple and efficient solution, we present You Only Look One-level Feature (YOLOF). In our method, two key components, Dilated Encoder and Uniform Matching, are proposed and bring considerable improvements. Extensive experiments on the COCO benchmark prove the effectiveness of the proposed model. Our YOLOF achieves comparable results with its feature pyramids counterpart RetinaNet while being 2.5× faster. Without transformer layers, YOLOF can match the performance of DETR in a single-level feature manner with 7× less training epochs. With an image size of 608×608, YOLOF achieves 44.3 mAP running at 60 fps on 2080Ti, which is 13% faster than YOLOv4.
+
+
+
+ +
+
+
+## Results and Models
+
+| Backbone | Style | Epoch | Lr schd | Mem (GB) | box AP | Config | Download |
+| :------: | :---: | :---: | :-----: | :------: | :----: | :--------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| R-50-C5 | caffe | Y | 1x | 8.3 | 37.5 | [config](./yolof_r50-c5_8xb8-1x_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolof/yolof_r50_c5_8x8_1x_coco/yolof_r50_c5_8x8_1x_coco_20210425_024427-8e864411.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolof/yolof_r50_c5_8x8_1x_coco/yolof_r50_c5_8x8_1x_coco_20210425_024427.log.json) |
+
+**Note**:
+
+1. We find that the performance is unstable and may fluctuate by about 0.3 mAP. mAP 37.4 ~ 37.7 is acceptable in YOLOF_R_50_C5_1x. Such fluctuation can also be found in the [original implementation](https://github.com/chensnathan/YOLOF).
+2. In addition to instability issues, sometimes there are large loss fluctuations and NAN, so there may still be problems with this project, which will be improved subsequently.
+
+## Citation
+
+```latex
+@inproceedings{chen2021you,
+ title={You Only Look One-level Feature},
+ author={Chen, Qiang and Wang, Yingming and Yang, Tong and Zhang, Xiangyu and Cheng, Jian and Sun, Jian},
+ booktitle={IEEE Conference on Computer Vision and Pattern Recognition},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/yolof/metafile.yml b/grounding-dino/mmdetection/configs/yolof/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..b3b7b7f8d5d3d7faec0cd04984ede59a99d06f38
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolof/metafile.yml
@@ -0,0 +1,32 @@
+Collections:
+ - Name: YOLOF
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Momentum
+ - Weight Decay
+ Training Resources: 8x V100 GPUs
+ Architecture:
+ - Dilated Encoder
+ - ResNet
+ Paper:
+ URL: https://arxiv.org/abs/2103.09460
+ Title: 'You Only Look One-level Feature'
+ README: configs/yolof/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.12.0/mmdet/models/detectors/yolof.py#L6
+ Version: v2.12.0
+
+Models:
+ - Name: yolof_r50_c5_8x8_1x_coco
+ In Collection: YOLOF
+ Config: configs/yolof/yolof_r50-c5_8xb8-1x_coco.py
+ Metadata:
+ Training Memory (GB): 8.3
+ Epochs: 12
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 37.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolof/yolof_r50_c5_8x8_1x_coco/yolof_r50_c5_8x8_1x_coco_20210425_024427-8e864411.pth
diff --git a/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-1x_coco.py b/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..5ea228e3e3270e07a4e5b171ab544c704fb172f3
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-1x_coco.py
@@ -0,0 +1,116 @@
+_base_ = [
+ '../_base_/datasets/coco_detection.py',
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
+]
+model = dict(
+ type='YOLOF',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ mean=[103.530, 116.280, 123.675],
+ std=[1.0, 1.0, 1.0],
+ bgr_to_rgb=False,
+ pad_size_divisor=32),
+ backbone=dict(
+ type='ResNet',
+ depth=50,
+ num_stages=4,
+ out_indices=(3, ),
+ frozen_stages=1,
+ norm_cfg=dict(type='BN', requires_grad=False),
+ norm_eval=True,
+ style='caffe',
+ init_cfg=dict(
+ type='Pretrained',
+ checkpoint='open-mmlab://detectron/resnet50_caffe')),
+ neck=dict(
+ type='DilatedEncoder',
+ in_channels=2048,
+ out_channels=512,
+ block_mid_channels=128,
+ num_residual_blocks=4,
+ block_dilations=[2, 4, 6, 8]),
+ bbox_head=dict(
+ type='YOLOFHead',
+ num_classes=80,
+ in_channels=512,
+ reg_decoded_bbox=True,
+ anchor_generator=dict(
+ type='AnchorGenerator',
+ ratios=[1.0],
+ scales=[1, 2, 4, 8, 16],
+ strides=[32]),
+ bbox_coder=dict(
+ type='DeltaXYWHBBoxCoder',
+ target_means=[.0, .0, .0, .0],
+ target_stds=[1., 1., 1., 1.],
+ add_ctr_clamp=True,
+ ctr_clamp=32),
+ loss_cls=dict(
+ type='FocalLoss',
+ use_sigmoid=True,
+ gamma=2.0,
+ alpha=0.25,
+ loss_weight=1.0),
+ loss_bbox=dict(type='GIoULoss', loss_weight=1.0)),
+ # training and testing settings
+ train_cfg=dict(
+ assigner=dict(
+ type='UniformAssigner', pos_ignore_thr=0.15, neg_ignore_thr=0.7),
+ allowed_border=-1,
+ pos_weight=-1,
+ debug=False),
+ test_cfg=dict(
+ nms_pre=1000,
+ min_bbox_size=0,
+ score_thr=0.05,
+ nms=dict(type='nms', iou_threshold=0.6),
+ max_per_img=100))
+# optimizer
+optim_wrapper = dict(
+ optimizer=dict(type='SGD', lr=0.12, momentum=0.9, weight_decay=0.0001),
+ paramwise_cfg=dict(
+ norm_decay_mult=0., custom_keys={'backbone': dict(lr_mult=1. / 3)}))
+
+# learning rate
+param_scheduler = [
+ dict(
+ type='LinearLR',
+ start_factor=0.00066667,
+ by_epoch=False,
+ begin=0,
+ end=1500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=12,
+ by_epoch=True,
+ milestones=[8, 11],
+ gamma=0.1)
+]
+
+train_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='RandomFlip', prob=0.5),
+ dict(type='RandomShift', prob=0.5, max_shift_px=32),
+ dict(type='PackDetInputs')
+]
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(1333, 800), keep_ratio=True),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+train_dataloader = dict(
+ batch_size=8, num_workers=8, dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-iter-1x_coco.py b/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-iter-1x_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..466a820099e3ac1760371e8352a89f93fbeef5ee
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolof/yolof_r50-c5_8xb8-iter-1x_coco.py
@@ -0,0 +1,32 @@
+_base_ = './yolof_r50-c5_8xb8-1x_coco.py'
+
+# We implemented the iter-based config according to the source code.
+# COCO dataset has 117266 images after filtering. We use 8 gpu and
+# 8 batch size training, so 22500 is equivalent to
+# 22500/(117266/(8x8))=12.3 epoch, 15000 is equivalent to 8.2 epoch,
+# 20000 is equivalent to 10.9 epoch. Due to lr(0.12) is large,
+# the iter-based and epoch-based setting have about 0.2 difference on
+# the mAP evaluation value.
+
+train_cfg = dict(
+ _delete_=True,
+ type='IterBasedTrainLoop',
+ max_iters=22500,
+ val_interval=4500)
+
+# learning rate policy
+param_scheduler = [
+ dict(
+ type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
+ dict(
+ type='MultiStepLR',
+ begin=0,
+ end=22500,
+ by_epoch=False,
+ milestones=[15000, 20000],
+ gamma=0.1)
+]
+train_dataloader = dict(sampler=dict(type='InfiniteSampler'))
+default_hooks = dict(checkpoint=dict(by_epoch=False, interval=2500))
+
+log_processor = dict(by_epoch=False)
diff --git a/grounding-dino/mmdetection/configs/yolox/README.md b/grounding-dino/mmdetection/configs/yolox/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..0cde192676db90e8dbd92de80b55d540493e17e5
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/README.md
@@ -0,0 +1,39 @@
+# YOLOX
+
+> [YOLOX: Exceeding YOLO Series in 2021](https://arxiv.org/abs/2107.08430)
+
+
+
+## Abstract
+
+In this report, we present some experienced improvements to YOLO series, forming a new high-performance detector -- YOLOX. We switch the YOLO detector to an anchor-free manner and conduct other advanced detection techniques, i.e., a decoupled head and the leading label assignment strategy SimOTA to achieve state-of-the-art results across a large scale range of models: For YOLO-Nano with only 0.91M parameters and 1.08G FLOPs, we get 25.3% AP on COCO, surpassing NanoDet by 1.8% AP; for YOLOv3, one of the most widely used detectors in industry, we boost it to 47.3% AP on COCO, outperforming the current best practice by 3.0% AP; for YOLOX-L with roughly the same amount of parameters as YOLOv4-CSP, YOLOv5-L, we achieve 50.0% AP on COCO at a speed of 68.9 FPS on Tesla V100, exceeding YOLOv5-L by 1.8% AP. Further, we won the 1st Place on Streaming Perception Challenge (Workshop on Autonomous Driving at CVPR 2021) using a single YOLOX-L model. We hope this report can provide useful experience for developers and researchers in practical scenes, and we also provide deploy versions with ONNX, TensorRT, NCNN, and Openvino supported.
+
+
+
+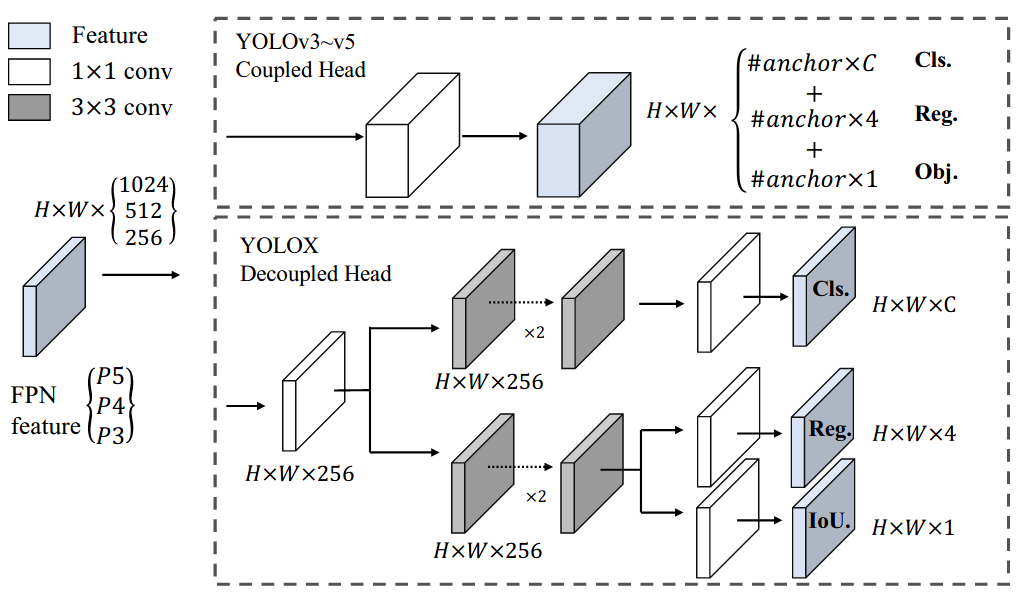 +
+
+
+## Results and Models
+
+| Backbone | size | Mem (GB) | box AP | Config | Download |
+| :--------: | :--: | :------: | :----: | :--------------------------------------: | :--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------: |
+| YOLOX-tiny | 416 | 3.5 | 32.0 | [config](./yolox_tiny_8xb8-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_20211124_171234-b4047906.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_20211124_171234.log.json) |
+| YOLOX-s | 640 | 7.6 | 40.5 | [config](./yolox_s_8xb8-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_20211121_095711.log.json) |
+| YOLOX-l | 640 | 19.9 | 49.4 | [config](./yolox_l_8xb8-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco_20211126_140236-d3bd2b23.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco_20211126_140236.log.json) |
+| YOLOX-x | 640 | 28.1 | 50.9 | [config](./yolox_x_8xb8-300e_coco.py) | [model](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_x_8x8_300e_coco/yolox_x_8x8_300e_coco_20211126_140254-1ef88d67.pth) \| [log](https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_x_8x8_300e_coco/yolox_x_8x8_300e_coco_20211126_140254.log.json) |
+
+**Note**:
+
+1. The test score threshold is 0.001, and the box AP indicates the best AP.
+2. Due to the need for pre-training weights, we cannot reproduce the performance of the `yolox-nano` model. Please refer to https://github.com/Megvii-BaseDetection/YOLOX/issues/674 for more information.
+3. We also trained the model by the official release of YOLOX based on [Megvii-BaseDetection/YOLOX#735](https://github.com/Megvii-BaseDetection/YOLOX/issues/735) with commit ID [38c633](https://github.com/Megvii-BaseDetection/YOLOX/tree/38c633bf176462ee42b110c70e4ffe17b5753208). We found that the best AP of `YOLOX-tiny`, `YOLOX-s`, `YOLOX-l`, and `YOLOX-x` is 31.8, 40.3, 49.2, and 50.9, respectively. The performance is consistent with that of our re-implementation (see Table above) but still has a gap (0.3~0.8 AP) in comparison with the reported performance in their [README](https://github.com/Megvii-BaseDetection/YOLOX/blob/38c633bf176462ee42b110c70e4ffe17b5753208/README.md#benchmark).
+
+## Citation
+
+```latex
+@article{yolox2021,
+ title={{YOLOX}: Exceeding YOLO Series in 2021},
+ author={Ge, Zheng and Liu, Songtao and Wang, Feng and Li, Zeming and Sun, Jian},
+ journal={arXiv preprint arXiv:2107.08430},
+ year={2021}
+}
+```
diff --git a/grounding-dino/mmdetection/configs/yolox/metafile.yml b/grounding-dino/mmdetection/configs/yolox/metafile.yml
new file mode 100644
index 0000000000000000000000000000000000000000..2f64450e94cae436a05f46da67d3a1264235ffbd
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/metafile.yml
@@ -0,0 +1,70 @@
+Collections:
+ - Name: YOLOX
+ Metadata:
+ Training Data: COCO
+ Training Techniques:
+ - SGD with Nesterov
+ - Weight Decay
+ - Cosine Annealing Lr Updater
+ Training Resources: 8x TITANXp GPUs
+ Architecture:
+ - CSPDarkNet
+ - PAFPN
+ Paper:
+ URL: https://arxiv.org/abs/2107.08430
+ Title: 'YOLOX: Exceeding YOLO Series in 2021'
+ README: configs/yolox/README.md
+ Code:
+ URL: https://github.com/open-mmlab/mmdetection/blob/v2.15.1/mmdet/models/detectors/yolox.py#L6
+ Version: v2.15.1
+
+
+Models:
+ - Name: yolox_s_8x8_300e_coco
+ In Collection: YOLOX
+ Config: configs/yolox/yolox_s_8xb8-300e_coco.py
+ Metadata:
+ Training Memory (GB): 7.6
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 40.5
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth
+ - Name: yolox_l_8x8_300e_coco
+ In Collection: YOLOX
+ Config: configs/yolox/yolox_l_8xb8-300e_coco.py
+ Metadata:
+ Training Memory (GB): 19.9
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 49.4
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_l_8x8_300e_coco/yolox_l_8x8_300e_coco_20211126_140236-d3bd2b23.pth
+ - Name: yolox_x_8x8_300e_coco
+ In Collection: YOLOX
+ Config: configs/yolox/yolox_x_8xb8-300e_coco.py
+ Metadata:
+ Training Memory (GB): 28.1
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 50.9
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_x_8x8_300e_coco/yolox_x_8x8_300e_coco_20211126_140254-1ef88d67.pth
+ - Name: yolox_tiny_8x8_300e_coco
+ In Collection: YOLOX
+ Config: configs/yolox/yolox_tiny_8xb8-300e_coco.py
+ Metadata:
+ Training Memory (GB): 3.5
+ Epochs: 300
+ Results:
+ - Task: Object Detection
+ Dataset: COCO
+ Metrics:
+ box AP: 32.0
+ Weights: https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_20211124_171234-b4047906.pth
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_l_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_l_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..2a4b287bad595db65df69b7d6f80163bd4a49e44
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_l_8xb8-300e_coco.py
@@ -0,0 +1,8 @@
+_base_ = './yolox_s_8xb8-300e_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(deepen_factor=1.0, widen_factor=1.0),
+ neck=dict(
+ in_channels=[256, 512, 1024], out_channels=256, num_csp_blocks=3),
+ bbox_head=dict(in_channels=256, feat_channels=256))
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_m_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_m_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..d82f9e98f1fcd4a1c6089807adc3cca2b48d6b5e
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_m_8xb8-300e_coco.py
@@ -0,0 +1,8 @@
+_base_ = './yolox_s_8xb8-300e_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(deepen_factor=0.67, widen_factor=0.75),
+ neck=dict(in_channels=[192, 384, 768], out_channels=192, num_csp_blocks=2),
+ bbox_head=dict(in_channels=192, feat_channels=192),
+)
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_nano_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_nano_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3f7a1c5ab066439c78ffa005a2a60c9057223849
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_nano_8xb8-300e_coco.py
@@ -0,0 +1,11 @@
+_base_ = './yolox_tiny_8xb8-300e_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(deepen_factor=0.33, widen_factor=0.25, use_depthwise=True),
+ neck=dict(
+ in_channels=[64, 128, 256],
+ out_channels=64,
+ num_csp_blocks=1,
+ use_depthwise=True),
+ bbox_head=dict(in_channels=64, feat_channels=64, use_depthwise=True))
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_s_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_s_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..3e324eb5b99202fd42c8d67847a1be1c165b4057
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_s_8xb8-300e_coco.py
@@ -0,0 +1,250 @@
+_base_ = [
+ '../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py',
+ './yolox_tta.py'
+]
+
+img_scale = (640, 640) # width, height
+
+# model settings
+model = dict(
+ type='YOLOX',
+ data_preprocessor=dict(
+ type='DetDataPreprocessor',
+ pad_size_divisor=32,
+ batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(480, 800),
+ size_divisor=32,
+ interval=10)
+ ]),
+ backbone=dict(
+ type='CSPDarknet',
+ deepen_factor=0.33,
+ widen_factor=0.5,
+ out_indices=(2, 3, 4),
+ use_depthwise=False,
+ spp_kernal_sizes=(5, 9, 13),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ ),
+ neck=dict(
+ type='YOLOXPAFPN',
+ in_channels=[128, 256, 512],
+ out_channels=128,
+ num_csp_blocks=1,
+ use_depthwise=False,
+ upsample_cfg=dict(scale_factor=2, mode='nearest'),
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish')),
+ bbox_head=dict(
+ type='YOLOXHead',
+ num_classes=80,
+ in_channels=128,
+ feat_channels=128,
+ stacked_convs=2,
+ strides=(8, 16, 32),
+ use_depthwise=False,
+ norm_cfg=dict(type='BN', momentum=0.03, eps=0.001),
+ act_cfg=dict(type='Swish'),
+ loss_cls=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='sum',
+ loss_weight=1.0),
+ loss_bbox=dict(
+ type='IoULoss',
+ mode='square',
+ eps=1e-16,
+ reduction='sum',
+ loss_weight=5.0),
+ loss_obj=dict(
+ type='CrossEntropyLoss',
+ use_sigmoid=True,
+ reduction='sum',
+ loss_weight=1.0),
+ loss_l1=dict(type='L1Loss', reduction='sum', loss_weight=1.0)),
+ train_cfg=dict(assigner=dict(type='SimOTAAssigner', center_radius=2.5)),
+ # In order to align the source code, the threshold of the val phase is
+ # 0.01, and the threshold of the test phase is 0.001.
+ test_cfg=dict(score_thr=0.01, nms=dict(type='nms', iou_threshold=0.65)))
+
+# dataset settings
+data_root = 'data/coco/'
+dataset_type = 'CocoDataset'
+
+# Example to use different file client
+# Method 1: simply set the data root and let the file I/O module
+# automatically infer from prefix (not support LMDB and Memcache yet)
+
+# data_root = 's3://openmmlab/datasets/detection/coco/'
+
+# Method 2: Use `backend_args`, `file_client_args` in versions before 3.0.0rc6
+# backend_args = dict(
+# backend='petrel',
+# path_mapping=dict({
+# './data/': 's3://openmmlab/datasets/detection/',
+# 'data/': 's3://openmmlab/datasets/detection/'
+# }))
+backend_args = None
+
+train_pipeline = [
+ dict(type='Mosaic', img_scale=img_scale, pad_val=114.0),
+ dict(
+ type='RandomAffine',
+ scaling_ratio_range=(0.1, 2),
+ # img_scale is (width, height)
+ border=(-img_scale[0] // 2, -img_scale[1] // 2)),
+ dict(
+ type='MixUp',
+ img_scale=img_scale,
+ ratio_range=(0.8, 1.6),
+ pad_val=114.0),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ # According to the official implementation, multi-scale
+ # training is not considered here but in the
+ # 'mmdet/models/detectors/yolox.py'.
+ # Resize and Pad are for the last 15 epochs when Mosaic,
+ # RandomAffine, and MixUp are closed by YOLOXModeSwitchHook.
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ # If the image is three-channel, the pad value needs
+ # to be set separately for each channel.
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1, 1), keep_empty=False),
+ dict(type='PackDetInputs')
+]
+
+train_dataset = dict(
+ # use MultiImageMixDataset wrapper to support mosaic and mixup
+ type='MultiImageMixDataset',
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_train2017.json',
+ data_prefix=dict(img='train2017/'),
+ pipeline=[
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='LoadAnnotations', with_bbox=True)
+ ],
+ filter_cfg=dict(filter_empty_gt=False, min_size=32),
+ backend_args=backend_args),
+ pipeline=train_pipeline)
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=backend_args),
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ sampler=dict(type='DefaultSampler', shuffle=True),
+ dataset=train_dataset)
+val_dataloader = dict(
+ batch_size=8,
+ num_workers=4,
+ persistent_workers=True,
+ drop_last=False,
+ sampler=dict(type='DefaultSampler', shuffle=False),
+ dataset=dict(
+ type=dataset_type,
+ data_root=data_root,
+ ann_file='annotations/instances_val2017.json',
+ data_prefix=dict(img='val2017/'),
+ test_mode=True,
+ pipeline=test_pipeline,
+ backend_args=backend_args))
+test_dataloader = val_dataloader
+
+val_evaluator = dict(
+ type='CocoMetric',
+ ann_file=data_root + 'annotations/instances_val2017.json',
+ metric='bbox',
+ backend_args=backend_args)
+test_evaluator = val_evaluator
+
+# training settings
+max_epochs = 300
+num_last_epochs = 15
+interval = 10
+
+train_cfg = dict(max_epochs=max_epochs, val_interval=interval)
+
+# optimizer
+# default 8 gpu
+base_lr = 0.01
+optim_wrapper = dict(
+ type='OptimWrapper',
+ optimizer=dict(
+ type='SGD', lr=base_lr, momentum=0.9, weight_decay=5e-4,
+ nesterov=True),
+ paramwise_cfg=dict(norm_decay_mult=0., bias_decay_mult=0.))
+
+# learning rate
+param_scheduler = [
+ dict(
+ # use quadratic formula to warm up 5 epochs
+ # and lr is updated by iteration
+ # TODO: fix default scope in get function
+ type='mmdet.QuadraticWarmupLR',
+ by_epoch=True,
+ begin=0,
+ end=5,
+ convert_to_iter_based=True),
+ dict(
+ # use cosine lr from 5 to 285 epoch
+ type='CosineAnnealingLR',
+ eta_min=base_lr * 0.05,
+ begin=5,
+ T_max=max_epochs - num_last_epochs,
+ end=max_epochs - num_last_epochs,
+ by_epoch=True,
+ convert_to_iter_based=True),
+ dict(
+ # use fixed lr during last 15 epochs
+ type='ConstantLR',
+ by_epoch=True,
+ factor=1,
+ begin=max_epochs - num_last_epochs,
+ end=max_epochs,
+ )
+]
+
+default_hooks = dict(
+ checkpoint=dict(
+ interval=interval,
+ max_keep_ckpts=3 # only keep latest 3 checkpoints
+ ))
+
+custom_hooks = [
+ dict(
+ type='YOLOXModeSwitchHook',
+ num_last_epochs=num_last_epochs,
+ priority=48),
+ dict(type='SyncNormHook', priority=48),
+ dict(
+ type='EMAHook',
+ ema_type='ExpMomentumEMA',
+ momentum=0.0001,
+ update_buffers=True,
+ priority=49)
+]
+
+# NOTE: `auto_scale_lr` is for automatically scaling LR,
+# USER SHOULD NOT CHANGE ITS VALUES.
+# base_batch_size = (8 GPUs) x (8 samples per GPU)
+auto_scale_lr = dict(base_batch_size=64)
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_tiny_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_tiny_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..86f7e9a6191066ab9b672d548b93a29e64746f29
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_tiny_8xb8-300e_coco.py
@@ -0,0 +1,54 @@
+_base_ = './yolox_s_8xb8-300e_coco.py'
+
+# model settings
+model = dict(
+ data_preprocessor=dict(batch_augments=[
+ dict(
+ type='BatchSyncRandomResize',
+ random_size_range=(320, 640),
+ size_divisor=32,
+ interval=10)
+ ]),
+ backbone=dict(deepen_factor=0.33, widen_factor=0.375),
+ neck=dict(in_channels=[96, 192, 384], out_channels=96),
+ bbox_head=dict(in_channels=96, feat_channels=96))
+
+img_scale = (640, 640) # width, height
+
+train_pipeline = [
+ dict(type='Mosaic', img_scale=img_scale, pad_val=114.0),
+ dict(
+ type='RandomAffine',
+ scaling_ratio_range=(0.5, 1.5),
+ # img_scale is (width, height)
+ border=(-img_scale[0] // 2, -img_scale[1] // 2)),
+ dict(type='YOLOXHSVRandomAug'),
+ dict(type='RandomFlip', prob=0.5),
+ # Resize and Pad are for the last 15 epochs when Mosaic and
+ # RandomAffine are closed by YOLOXModeSwitchHook.
+ dict(type='Resize', scale=img_scale, keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='FilterAnnotations', min_gt_bbox_wh=(1, 1), keep_empty=False),
+ dict(type='PackDetInputs')
+]
+
+test_pipeline = [
+ dict(type='LoadImageFromFile', backend_args={{_base_.backend_args}}),
+ dict(type='Resize', scale=(416, 416), keep_ratio=True),
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ dict(type='LoadAnnotations', with_bbox=True),
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor'))
+]
+
+train_dataloader = dict(dataset=dict(pipeline=train_pipeline))
+val_dataloader = dict(dataset=dict(pipeline=test_pipeline))
+test_dataloader = val_dataloader
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_tta.py b/grounding-dino/mmdetection/configs/yolox/yolox_tta.py
new file mode 100644
index 0000000000000000000000000000000000000000..e65244be6e1bb70393d111ef4d25334d3b2ce8a6
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_tta.py
@@ -0,0 +1,36 @@
+tta_model = dict(
+ type='DetTTAModel',
+ tta_cfg=dict(nms=dict(type='nms', iou_threshold=0.65), max_per_img=100))
+
+img_scales = [(640, 640), (320, 320), (960, 960)]
+tta_pipeline = [
+ dict(type='LoadImageFromFile', backend_args=None),
+ dict(
+ type='TestTimeAug',
+ transforms=[
+ [
+ dict(type='Resize', scale=s, keep_ratio=True)
+ for s in img_scales
+ ],
+ [
+ # ``RandomFlip`` must be placed before ``Pad``, otherwise
+ # bounding box coordinates after flipping cannot be
+ # recovered correctly.
+ dict(type='RandomFlip', prob=1.),
+ dict(type='RandomFlip', prob=0.)
+ ],
+ [
+ dict(
+ type='Pad',
+ pad_to_square=True,
+ pad_val=dict(img=(114.0, 114.0, 114.0))),
+ ],
+ [dict(type='LoadAnnotations', with_bbox=True)],
+ [
+ dict(
+ type='PackDetInputs',
+ meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
+ 'scale_factor', 'flip', 'flip_direction'))
+ ]
+ ])
+]
diff --git a/grounding-dino/mmdetection/configs/yolox/yolox_x_8xb8-300e_coco.py b/grounding-dino/mmdetection/configs/yolox/yolox_x_8xb8-300e_coco.py
new file mode 100644
index 0000000000000000000000000000000000000000..34828e0363a2f282af59da74e805e59772dfeb69
--- /dev/null
+++ b/grounding-dino/mmdetection/configs/yolox/yolox_x_8xb8-300e_coco.py
@@ -0,0 +1,8 @@
+_base_ = './yolox_s_8xb8-300e_coco.py'
+
+# model settings
+model = dict(
+ backbone=dict(deepen_factor=1.33, widen_factor=1.25),
+ neck=dict(
+ in_channels=[320, 640, 1280], out_channels=320, num_csp_blocks=4),
+ bbox_head=dict(in_channels=320, feat_channels=320))
diff --git a/grounding-dino/mmdetection/dataset-index.yml b/grounding-dino/mmdetection/dataset-index.yml
new file mode 100644
index 0000000000000000000000000000000000000000..116412e1ad678cadb5b9734df95e6fe096b33164
--- /dev/null
+++ b/grounding-dino/mmdetection/dataset-index.yml
@@ -0,0 +1,18 @@
+openxlab: true
+voc2007:
+ dataset: OpenDataLab/PASCAL_VOC2007
+ download_root: data
+ data_root: data
+ script: tools/dataset_converters/scripts/preprocess_voc2007.sh
+
+voc2012:
+ dataset: OpenDataLab/PASCAL_VOC2012
+ download_root: data
+ data_root: data
+ script: tools/dataset_converters/scripts/preprocess_voc2012.sh
+
+coco2017:
+ dataset: OpenDataLab/COCO_2017
+ download_root: data
+ data_root: data/coco
+ script: tools/dataset_converters/scripts/preprocess_coco2017.sh
diff --git a/grounding-dino/mmdetection/model-index.yml b/grounding-dino/mmdetection/model-index.yml
new file mode 100644
index 0000000000000000000000000000000000000000..d4b4392b422042070139d009407e40f64c80a4f6
--- /dev/null
+++ b/grounding-dino/mmdetection/model-index.yml
@@ -0,0 +1,102 @@
+Import:
+ - configs/albu_example/metafile.yml
+ - configs/atss/metafile.yml
+ - configs/autoassign/metafile.yml
+ - configs/boxinst/metafile.yml
+ - configs/carafe/metafile.yml
+ - configs/cascade_rcnn/metafile.yml
+ - configs/cascade_rpn/metafile.yml
+ - configs/centernet/metafile.yml
+ - configs/centripetalnet/metafile.yml
+ - configs/condinst/metafile.yml
+ - configs/conditional_detr/metafile.yml
+ - configs/cornernet/metafile.yml
+ - configs/convnext/metafile.yml
+ - configs/crowddet/metafile.yml
+ - configs/dab_detr/metafile.yml
+ - configs/dcn/metafile.yml
+ - configs/dcnv2/metafile.yml
+ - configs/ddod/metafile.yml
+ - configs/deformable_detr/metafile.yml
+ - configs/detectors/metafile.yml
+ - configs/detr/metafile.yml
+ - configs/dino/metafile.yml
+ - configs/double_heads/metafile.yml
+ - configs/dyhead/metafile.yml
+ - configs/dynamic_rcnn/metafile.yml
+ - configs/efficientnet/metafile.yml
+ - configs/empirical_attention/metafile.yml
+ - configs/faster_rcnn/metafile.yml
+ - configs/fcos/metafile.yml
+ - configs/foveabox/metafile.yml
+ - configs/fpg/metafile.yml
+ - configs/free_anchor/metafile.yml
+ - configs/fsaf/metafile.yml
+ - configs/gcnet/metafile.yml
+ - configs/gfl/metafile.yml
+ - configs/ghm/metafile.yml
+ - configs/gn/metafile.yml
+ - configs/gn+ws/metafile.yml
+ - configs/grid_rcnn/metafile.yml
+ - configs/groie/metafile.yml
+ - configs/guided_anchoring/metafile.yml
+ - configs/hrnet/metafile.yml
+ - configs/htc/metafile.yml
+ - configs/instaboost/metafile.yml
+ - configs/lad/metafile.yml
+ - configs/ld/metafile.yml
+ - configs/libra_rcnn/metafile.yml
+ - configs/lvis/metafile.yml
+ - configs/mask2former/metafile.yml
+ - configs/mask_rcnn/metafile.yml
+ - configs/maskformer/metafile.yml
+ - configs/ms_rcnn/metafile.yml
+ - configs/nas_fcos/metafile.yml
+ - configs/nas_fpn/metafile.yml
+ - configs/openimages/metafile.yml
+ - configs/paa/metafile.yml
+ - configs/pafpn/metafile.yml
+ - configs/panoptic_fpn/metafile.yml
+ - configs/pvt/metafile.yml
+ - configs/pisa/metafile.yml
+ - configs/point_rend/metafile.yml
+ - configs/queryinst/metafile.yml
+ - configs/regnet/metafile.yml
+ - configs/reppoints/metafile.yml
+ - configs/res2net/metafile.yml
+ - configs/resnest/metafile.yml
+ - configs/resnet_strikes_back/metafile.yml
+ - configs/retinanet/metafile.yml
+ - configs/rpn/metafile.yml
+ - configs/rtmdet/metafile.yml
+ - configs/sabl/metafile.yml
+ - configs/scnet/metafile.yml
+ - configs/scratch/metafile.yml
+ - configs/seesaw_loss/metafile.yml
+ - configs/simple_copy_paste/metafile.yml
+ - configs/soft_teacher/metafile.yml
+ - configs/sparse_rcnn/metafile.yml
+ - configs/solo/metafile.yml
+ - configs/solov2/metafile.yml
+ - configs/ssd/metafile.yml
+ - configs/strong_baselines/metafile.yml
+ - configs/swin/metafile.yml
+ - configs/tridentnet/metafile.yml
+ - configs/tood/metafile.yml
+ - configs/vfnet/metafile.yml
+ - configs/yolact/metafile.yml
+ - configs/yolo/metafile.yml
+ - configs/yolof/metafile.yml
+ - configs/yolox/metafile.yml
+ - configs/bytetrack/metafile.yml
+ - configs/strongsort/metafile.yml
+ - configs/ocsort/metafile.yml
+ - configs/sort/metafile.yml
+ - configs/deepsort/metafile.yml
+ - configs/qdtrack/metafile.yml
+ - configs/mask2former_vis/metafile.yml
+ - configs/masktrack_rcnn/metafile.yml
+ - configs/glip/metafile.yml
+ - configs/ddq/metafile.yml
+ - configs/grounding_dino/metafile.yml
+ - configs/mm_grounding_dino/metafile.yml
diff --git a/grounding-dino/mmdetection/pytest.ini b/grounding-dino/mmdetection/pytest.ini
new file mode 100644
index 0000000000000000000000000000000000000000..9796e871e70c7c67345b1d6bcf708c0c82377a98
--- /dev/null
+++ b/grounding-dino/mmdetection/pytest.ini
@@ -0,0 +1,7 @@
+[pytest]
+addopts = --xdoctest --xdoctest-style=auto
+norecursedirs = .git ignore build __pycache__ data docker docs .eggs
+
+filterwarnings= default
+ ignore:.*No cfgstr given in Cacher constructor or call.*:Warning
+ ignore:.*Define the __nice__ method for.*:Warning
diff --git a/grounding-dino/mmdetection/requirements.txt b/grounding-dino/mmdetection/requirements.txt
new file mode 100644
index 0000000000000000000000000000000000000000..796789a783403f5d1e6089b2efd33bf9863743fd
--- /dev/null
+++ b/grounding-dino/mmdetection/requirements.txt
@@ -0,0 +1,3 @@
+-r requirements/build.txt
+-r requirements/optional.txt
+-r requirements/runtime.txt
diff --git a/grounding-dino/mmdetection/setup.cfg b/grounding-dino/mmdetection/setup.cfg
new file mode 100644
index 0000000000000000000000000000000000000000..7ecd4b98a705b37be99a2726f1b3d894e41be834
--- /dev/null
+++ b/grounding-dino/mmdetection/setup.cfg
@@ -0,0 +1,24 @@
+[isort]
+line_length = 79
+multi_line_output = 0
+extra_standard_library = setuptools
+known_first_party = mmdet
+known_third_party = PIL,asynctest,cityscapesscripts,cv2,gather_models,matplotlib,mmcv,mmengine,numpy,onnx,onnxruntime,pycocotools,parameterized,pytest,pytorch_sphinx_theme,requests,scipy,seaborn,six,terminaltables,torch,ts,yaml
+no_lines_before = STDLIB,LOCALFOLDER
+default_section = THIRDPARTY
+
+[yapf]
+BASED_ON_STYLE = pep8
+BLANK_LINE_BEFORE_NESTED_CLASS_OR_DEF = true
+SPLIT_BEFORE_EXPRESSION_AFTER_OPENING_PAREN = true
+
+# ignore-words-list needs to be lowercase format. For example, if we want to
+# ignore word "BA", then we need to append "ba" to ignore-words-list rather
+# than "BA"
+[codespell]
+skip = *.ipynb,configs/v3det/category_name_13204_v3det_2023_v1.txt
+quiet-level = 3
+ignore-words-list = patten,nd,ty,mot,hist,formating,winn,gool,datas,wan,confids,TOOD,tood,ba,warmup,nam,DOTA,dota,conveyer,singed,comittee,extention,moniter,pres,
+
+[flake8]
+per-file-ignores = mmdet/configs/*: F401,F403,F405
diff --git a/grounding-dino/mmdetection/setup.py b/grounding-dino/mmdetection/setup.py
new file mode 100644
index 0000000000000000000000000000000000000000..25f1cf7fb0f8b3743081d2aa787003a0b95a9d33
--- /dev/null
+++ b/grounding-dino/mmdetection/setup.py
@@ -0,0 +1,224 @@
+#!/usr/bin/env python
+# Copyright (c) OpenMMLab. All rights reserved.
+import os
+import os.path as osp
+import platform
+import shutil
+import sys
+import warnings
+from setuptools import find_packages, setup
+
+import torch
+from torch.utils.cpp_extension import (BuildExtension, CppExtension,
+ CUDAExtension)
+
+
+def readme():
+ with open('README.md', encoding='utf-8') as f:
+ content = f.read()
+ return content
+
+
+version_file = 'mmdet/version.py'
+
+
+def get_version():
+ with open(version_file, 'r') as f:
+ exec(compile(f.read(), version_file, 'exec'))
+ return locals()['__version__']
+
+
+def make_cuda_ext(name, module, sources, sources_cuda=[]):
+
+ define_macros = []
+ extra_compile_args = {'cxx': []}
+
+ if torch.cuda.is_available() or os.getenv('FORCE_CUDA', '0') == '1':
+ define_macros += [('WITH_CUDA', None)]
+ extension = CUDAExtension
+ extra_compile_args['nvcc'] = [
+ '-D__CUDA_NO_HALF_OPERATORS__',
+ '-D__CUDA_NO_HALF_CONVERSIONS__',
+ '-D__CUDA_NO_HALF2_OPERATORS__',
+ ]
+ sources += sources_cuda
+ else:
+ print(f'Compiling {name} without CUDA')
+ extension = CppExtension
+
+ return extension(
+ name=f'{module}.{name}',
+ sources=[os.path.join(*module.split('.'), p) for p in sources],
+ define_macros=define_macros,
+ extra_compile_args=extra_compile_args)
+
+
+def parse_requirements(fname='requirements.txt', with_version=True):
+ """Parse the package dependencies listed in a requirements file but strips
+ specific versioning information.
+
+ Args:
+ fname (str): path to requirements file
+ with_version (bool, default=False): if True include version specs
+
+ Returns:
+ List[str]: list of requirements items
+
+ CommandLine:
+ python -c "import setup; print(setup.parse_requirements())"
+ """
+ import re
+ import sys
+ from os.path import exists
+ require_fpath = fname
+
+ def parse_line(line):
+ """Parse information from a line in a requirements text file."""
+ if line.startswith('-r '):
+ # Allow specifying requirements in other files
+ target = line.split(' ')[1]
+ for info in parse_require_file(target):
+ yield info
+ else:
+ info = {'line': line}
+ if line.startswith('-e '):
+ info['package'] = line.split('#egg=')[1]
+ elif '@git+' in line:
+ info['package'] = line
+ else:
+ # Remove versioning from the package
+ pat = '(' + '|'.join(['>=', '==', '>']) + ')'
+ parts = re.split(pat, line, maxsplit=1)
+ parts = [p.strip() for p in parts]
+
+ info['package'] = parts[0]
+ if len(parts) > 1:
+ op, rest = parts[1:]
+ if ';' in rest:
+ # Handle platform specific dependencies
+ # http://setuptools.readthedocs.io/en/latest/setuptools.html#declaring-platform-specific-dependencies
+ version, platform_deps = map(str.strip,
+ rest.split(';'))
+ info['platform_deps'] = platform_deps
+ else:
+ version = rest # NOQA
+ info['version'] = (op, version)
+ yield info
+
+ def parse_require_file(fpath):
+ with open(fpath, 'r') as f:
+ for line in f.readlines():
+ line = line.strip()
+ if line and not line.startswith('#'):
+ for info in parse_line(line):
+ yield info
+
+ def gen_packages_items():
+ if exists(require_fpath):
+ for info in parse_require_file(require_fpath):
+ parts = [info['package']]
+ if with_version and 'version' in info:
+ parts.extend(info['version'])
+ if not sys.version.startswith('3.4'):
+ # apparently package_deps are broken in 3.4
+ platform_deps = info.get('platform_deps')
+ if platform_deps is not None:
+ parts.append(';' + platform_deps)
+ item = ''.join(parts)
+ yield item
+
+ packages = list(gen_packages_items())
+ return packages
+
+
+def add_mim_extension():
+ """Add extra files that are required to support MIM into the package.
+
+ These files will be added by creating a symlink to the originals if the
+ package is installed in `editable` mode (e.g. pip install -e .), or by
+ copying from the originals otherwise.
+ """
+
+ # parse installment mode
+ if 'develop' in sys.argv:
+ # installed by `pip install -e .`
+ if platform.system() == 'Windows':
+ # set `copy` mode here since symlink fails on Windows.
+ mode = 'copy'
+ else:
+ mode = 'symlink'
+ elif 'sdist' in sys.argv or 'bdist_wheel' in sys.argv:
+ # installed by `pip install .`
+ # or create source distribution by `python setup.py sdist`
+ mode = 'copy'
+ else:
+ return
+
+ filenames = [
+ 'tools', 'configs', 'demo', 'model-index.yml', 'dataset-index.yml'
+ ]
+ repo_path = osp.dirname(__file__)
+ mim_path = osp.join(repo_path, 'mmdet', '.mim')
+ os.makedirs(mim_path, exist_ok=True)
+
+ for filename in filenames:
+ if osp.exists(filename):
+ src_path = osp.join(repo_path, filename)
+ tar_path = osp.join(mim_path, filename)
+
+ if osp.isfile(tar_path) or osp.islink(tar_path):
+ os.remove(tar_path)
+ elif osp.isdir(tar_path):
+ shutil.rmtree(tar_path)
+
+ if mode == 'symlink':
+ src_relpath = osp.relpath(src_path, osp.dirname(tar_path))
+ os.symlink(src_relpath, tar_path)
+ elif mode == 'copy':
+ if osp.isfile(src_path):
+ shutil.copyfile(src_path, tar_path)
+ elif osp.isdir(src_path):
+ shutil.copytree(src_path, tar_path)
+ else:
+ warnings.warn(f'Cannot copy file {src_path}.')
+ else:
+ raise ValueError(f'Invalid mode {mode}')
+
+
+if __name__ == '__main__':
+ add_mim_extension()
+ setup(
+ name='mmdet',
+ version=get_version(),
+ description='OpenMMLab Detection Toolbox and Benchmark',
+ long_description=readme(),
+ long_description_content_type='text/markdown',
+ author='MMDetection Contributors',
+ author_email='openmmlab@gmail.com',
+ keywords='computer vision, object detection',
+ url='https://github.com/open-mmlab/mmdetection',
+ packages=find_packages(exclude=('configs', 'tools', 'demo')),
+ include_package_data=True,
+ classifiers=[
+ 'Development Status :: 5 - Production/Stable',
+ 'License :: OSI Approved :: Apache Software License',
+ 'Operating System :: OS Independent',
+ 'Programming Language :: Python :: 3',
+ 'Programming Language :: Python :: 3.7',
+ 'Programming Language :: Python :: 3.8',
+ 'Programming Language :: Python :: 3.9',
+ ],
+ license='Apache License 2.0',
+ install_requires=parse_requirements('requirements/runtime.txt'),
+ extras_require={
+ 'all': parse_requirements('requirements.txt'),
+ 'tests': parse_requirements('requirements/tests.txt'),
+ 'build': parse_requirements('requirements/build.txt'),
+ 'optional': parse_requirements('requirements/optional.txt'),
+ 'mim': parse_requirements('requirements/mminstall.txt'),
+ 'tracking': parse_requirements('requirements/tracking.txt'),
+ 'multimodal': parse_requirements('requirements/multimodal.txt'),
+ },
+ ext_modules=[],
+ cmdclass={'build_ext': BuildExtension},
+ zip_safe=False)
+