 +
+
+
+ +
+ +
+ +
+ +
+ +
+ \n",
+ "\n",
+ "Mask R-CNN adds a mask branch based on the original Faster R-CNN. It also uses RoIAlign, a more precise version of RoIPooling for RoI feature extraction to improve the performance.\n",
+ "\n",
+ "\n",
+ "\n"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 3,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "sWI-nX5yRYYQ",
+ "outputId": "fd91e337-27cb-492c-a948-98adcbcfca27"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ "processing mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco...\n",
+ "\u001b[2Kdownloading \u001b[90m━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\u001b[0m \u001b[32m169.6/169.6 MiB\u001b[0m \u001b[31m9.4 MB/s\u001b[0m eta \u001b[36m0:00:00\u001b[0m\n",
+ "\u001b[?25h\u001b[32mSuccessfully downloaded mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth to /content/mmdetection/checkpoints\u001b[0m\n",
+ "\u001b[32mSuccessfully dumped mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py to /content/mmdetection/checkpoints\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "!mim download mmdet --config mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco --dest ./checkpoints"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 4,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "8M5KUnX7Np3h",
+ "outputId": "71de79c0-9f7e-4cae-f810-5c0a20fe9be8"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ "Loads checkpoint by local backend from path: checkpoints/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth\n"
+ ]
+ }
+ ],
+ "source": [
+ "import mmcv\n",
+ "import mmengine\n",
+ "from mmdet.apis import init_detector, inference_detector\n",
+ "from mmdet.utils import register_all_modules\n",
+ "# Choose to use a config and initialize the detector\n",
+ "config_file = 'configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py'\n",
+ "# Setup a checkpoint file to load\n",
+ "checkpoint_file = 'checkpoints/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth'\n",
+ "\n",
+ "# register all modules in mmdet into the registries\n",
+ "register_all_modules()\n",
+ "\n",
+ "# build the model from a config file and a checkpoint file\n",
+ "model = init_detector(config_file, checkpoint_file, device='cuda:0') # or device='cuda:0'\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "pVqDQAOiKkJK"
+ },
+ "source": [
+ "From the printed model, we will find that the model does consist of the components that we described earlier. It uses ResNet as its CNN backbone, and has a RPN head and RoI Head.\n",
+ "The RoI Head includes box head and mask head. In addition, the model has a neural network module, named neck, directly after the CNN backbone. It is a [feature pyramid network (FPN)](https://arxiv.org/abs/1612.03144) for enhancing the multi-scale features.\n",
+ "\n",
+ "\n",
+ "### Inference with the detector\n",
+ "\n",
+ "The model is successfully created and loaded, let's see how good it is. We use the high-level API `inference_detector` implemented in the MMDetection. This API is created to ease the inference process. The details of the codes can be found [here](https://github.com/open-mmlab/mmdetection/blob/master/mmdet/apis/inference.py#L15)."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 5,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "Wi6DRpsQPEmV",
+ "outputId": "42a9dd39-edcb-49f1-e318-a3cd77f89eee"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ "
\n",
+ "\n",
+ "Mask R-CNN adds a mask branch based on the original Faster R-CNN. It also uses RoIAlign, a more precise version of RoIPooling for RoI feature extraction to improve the performance.\n",
+ "\n",
+ "\n",
+ "\n"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 3,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "sWI-nX5yRYYQ",
+ "outputId": "fd91e337-27cb-492c-a948-98adcbcfca27"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ "processing mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco...\n",
+ "\u001b[2Kdownloading \u001b[90m━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━\u001b[0m \u001b[32m169.6/169.6 MiB\u001b[0m \u001b[31m9.4 MB/s\u001b[0m eta \u001b[36m0:00:00\u001b[0m\n",
+ "\u001b[?25h\u001b[32mSuccessfully downloaded mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth to /content/mmdetection/checkpoints\u001b[0m\n",
+ "\u001b[32mSuccessfully dumped mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py to /content/mmdetection/checkpoints\u001b[0m\n"
+ ]
+ }
+ ],
+ "source": [
+ "!mim download mmdet --config mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco --dest ./checkpoints"
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 4,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "8M5KUnX7Np3h",
+ "outputId": "71de79c0-9f7e-4cae-f810-5c0a20fe9be8"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ "Loads checkpoint by local backend from path: checkpoints/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth\n"
+ ]
+ }
+ ],
+ "source": [
+ "import mmcv\n",
+ "import mmengine\n",
+ "from mmdet.apis import init_detector, inference_detector\n",
+ "from mmdet.utils import register_all_modules\n",
+ "# Choose to use a config and initialize the detector\n",
+ "config_file = 'configs/mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-3x_coco.py'\n",
+ "# Setup a checkpoint file to load\n",
+ "checkpoint_file = 'checkpoints/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth'\n",
+ "\n",
+ "# register all modules in mmdet into the registries\n",
+ "register_all_modules()\n",
+ "\n",
+ "# build the model from a config file and a checkpoint file\n",
+ "model = init_detector(config_file, checkpoint_file, device='cuda:0') # or device='cuda:0'\n"
+ ]
+ },
+ {
+ "cell_type": "markdown",
+ "metadata": {
+ "id": "pVqDQAOiKkJK"
+ },
+ "source": [
+ "From the printed model, we will find that the model does consist of the components that we described earlier. It uses ResNet as its CNN backbone, and has a RPN head and RoI Head.\n",
+ "The RoI Head includes box head and mask head. In addition, the model has a neural network module, named neck, directly after the CNN backbone. It is a [feature pyramid network (FPN)](https://arxiv.org/abs/1612.03144) for enhancing the multi-scale features.\n",
+ "\n",
+ "\n",
+ "### Inference with the detector\n",
+ "\n",
+ "The model is successfully created and loaded, let's see how good it is. We use the high-level API `inference_detector` implemented in the MMDetection. This API is created to ease the inference process. The details of the codes can be found [here](https://github.com/open-mmlab/mmdetection/blob/master/mmdet/apis/inference.py#L15)."
+ ]
+ },
+ {
+ "cell_type": "code",
+ "execution_count": 5,
+ "metadata": {
+ "colab": {
+ "base_uri": "https://localhost:8080/"
+ },
+ "id": "Wi6DRpsQPEmV",
+ "outputId": "42a9dd39-edcb-49f1-e318-a3cd77f89eee"
+ },
+ "outputs": [
+ {
+ "name": "stdout",
+ "output_type": "stream",
+ "text": [
+ " \n",
+ "
\n",
+ "  \n",
+ " \n",
+ "
\n",
+ " \n",
+ "  \n",
+ " \n",
+ " \n",
+ "
\n",
+ " \n",
+ " \n",
+ "  \n",
+ " \n",
+ " \n",
+ "
\n",
+ " \n",
+ " \n",
+ "  \n",
+ " \n",
+ " \n",
+ "
\n",
+ " \n",
+ " \n",
+ "  \n",
+ " \n",
+ " \n",
+ "
\n",
+ " \n",
+ " \n",
+ "  \n",
+ "
\n",
+ "Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "07ed8efcd87a40059af36f0c43ef5147": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_69ce7e58e27f4e1186ab0afcb99d37c3", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 13.5 it/s \n\n", + "text/plain": "Inference \u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m \u001b[35m13.5 it/s\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "1bb724cb12c240a18f651dd99842e5b0": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "2abd7eef6f1f4b9c865a466b3dd5ef24": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_8951ec1ee7164f7ca7239a37e80e98ea", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "38083c2f29604d1d9a7dcf9845dfbf33": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_54cdfe55e0f04df9ab844961a089fe2f", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "54cdfe55e0f04df9ab844961a089fe2f": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "59bfd22c751f4ed4baefa466e7653315": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_0164804ae2f842fe8d2a4c5414c4a0c2", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "69ce7e58e27f4e1186ab0afcb99d37c3": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "6fa2cda48fda43f9bf53a0f533392eba": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_0226fedc26044ab2abdccc4fcbe226f8", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "7e62816d1f6c441fb98c1f8e942fff1d": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "8951ec1ee7164f7ca7239a37e80e98ea": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "95674a6baa1842d2981fe60b31ab6cad": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_7e62816d1f6c441fb98c1f8e942fff1d", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ \n\n", + "text/plain": "Inference \u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "a64a6eb038c44236b80579b2bfc4b8e3": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_eef25a0509854f98883395a2c0fc2134", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 9.7 it/s \n\n", + "text/plain": "Inference \u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m \u001b[35m9.7 it/s\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + }, + "eef25a0509854f98883395a2c0fc2134": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "f6634888109048069b6844e9f9b4ec13": { + "model_module": "@jupyter-widgets/base", + "model_module_version": "1.2.0", + "model_name": "LayoutModel", + "state": { + "_model_module": "@jupyter-widgets/base", + "_model_module_version": "1.2.0", + "_model_name": "LayoutModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/base", + "_view_module_version": "1.2.0", + "_view_name": "LayoutView", + "align_content": null, + "align_items": null, + "align_self": null, + "border": null, + "bottom": null, + "display": null, + "flex": null, + "flex_flow": null, + "grid_area": null, + "grid_auto_columns": null, + "grid_auto_flow": null, + "grid_auto_rows": null, + "grid_column": null, + "grid_gap": null, + "grid_row": null, + "grid_template_areas": null, + "grid_template_columns": null, + "grid_template_rows": null, + "height": null, + "justify_content": null, + "justify_items": null, + "left": null, + "margin": null, + "max_height": null, + "max_width": null, + "min_height": null, + "min_width": null, + "object_fit": null, + "object_position": null, + "order": null, + "overflow": null, + "overflow_x": null, + "overflow_y": null, + "padding": null, + "right": null, + "top": null, + "visibility": null, + "width": null + } + }, + "f87f0b153b0342ad99dcd320a1302c92": { + "model_module": "@jupyter-widgets/output", + "model_module_version": "1.0.0", + "model_name": "OutputModel", + "state": { + "_dom_classes": [], + "_model_module": "@jupyter-widgets/output", + "_model_module_version": "1.0.0", + "_model_name": "OutputModel", + "_view_count": null, + "_view_module": "@jupyter-widgets/output", + "_view_module_version": "1.0.0", + "_view_name": "OutputView", + "layout": "IPY_MODEL_f6634888109048069b6844e9f9b4ec13", + "msg_id": "", + "outputs": [ + { + "data": { + "text/html": "
Inference ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 9.0 it/s \n\n", + "text/plain": "Inference \u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;249;38;114m━\u001b[0m\u001b[38;2;244;38;112m━\u001b[0m\u001b[38;2;230;39;108m━\u001b[0m\u001b[38;2;209;42;102m━\u001b[0m\u001b[38;2;183;44;94m━\u001b[0m\u001b[38;2;153;48;86m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;58;58;58m━\u001b[0m\u001b[38;2;62;57;59m━\u001b[0m\u001b[38;2;76;56;63m━\u001b[0m\u001b[38;2;97;53;69m━\u001b[0m\u001b[38;2;123;51;77m━\u001b[0m \u001b[35m9.0 it/s\u001b[0m \u001b[36m \u001b[0m\n" + }, + "metadata": {}, + "output_type": "display_data" + } + ] + } + } + } + } + }, + "nbformat": 4, + "nbformat_minor": 0 +} diff --git a/grounding-dino/mmdetection/demo/large_image_demo.py b/grounding-dino/mmdetection/demo/large_image_demo.py new file mode 100644 index 0000000000000000000000000000000000000000..f3d8d22fb654c6daf01f3190ec6c3e8fd4d7eac2 --- /dev/null +++ b/grounding-dino/mmdetection/demo/large_image_demo.py @@ -0,0 +1,282 @@ +# Copyright (c) OpenMMLab. All rights reserved. +"""Perform MMDET inference on large images (as satellite imagery) as: + +```shell +wget -P checkpoint https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r101_fpn_2x_coco/faster_rcnn_r101_fpn_2x_coco_bbox_mAP-0.398_20200504_210455-1d2dac9c.pth # noqa: E501, E261. + +python demo/large_image_demo.py \ + demo/large_image.jpg \ + configs/faster_rcnn/faster-rcnn_r101_fpn_2x_coco.py \ + checkpoint/faster_rcnn_r101_fpn_2x_coco_bbox_mAP-0.398_20200504_210455-1d2dac9c.pth +``` +""" + +import os +import random +from argparse import ArgumentParser +from pathlib import Path + +import mmcv +import numpy as np +from mmengine.config import Config, ConfigDict +from mmengine.logging import print_log +from mmengine.utils import ProgressBar + +from mmdet.apis import inference_detector, init_detector + +try: + from sahi.slicing import slice_image +except ImportError: + raise ImportError('Please run "pip install -U sahi" ' + 'to install sahi first for large image inference.') + +from mmdet.registry import VISUALIZERS +from mmdet.utils.large_image import merge_results_by_nms, shift_predictions +from mmdet.utils.misc import get_file_list + + +def parse_args(): + parser = ArgumentParser( + description='Perform MMDET inference on large images.') + parser.add_argument( + 'img', help='Image path, include image file, dir and URL.') + parser.add_argument('config', help='Config file') + parser.add_argument('checkpoint', help='Checkpoint file') + parser.add_argument( + '--out-dir', default='./output', help='Path to output file') + parser.add_argument( + '--device', default='cuda:0', help='Device used for inference') + parser.add_argument( + '--show', action='store_true', help='Show the detection results') + parser.add_argument( + '--tta', + action='store_true', + help='Whether to use test time augmentation') + parser.add_argument( + '--score-thr', type=float, default=0.3, help='Bbox score threshold') + parser.add_argument( + '--patch-size', type=int, default=640, help='The size of patches') + parser.add_argument( + '--patch-overlap-ratio', + type=float, + default=0.25, + help='Ratio of overlap between two patches') + parser.add_argument( + '--merge-iou-thr', + type=float, + default=0.25, + help='IoU threshould for merging results') + parser.add_argument( + '--merge-nms-type', + type=str, + default='nms', + help='NMS type for merging results') + parser.add_argument( + '--batch-size', + type=int, + default=1, + help='Batch size, must greater than or equal to 1') + parser.add_argument( + '--debug', + action='store_true', + help='Export debug results before merging') + parser.add_argument( + '--save-patch', + action='store_true', + help='Save the results of each patch. ' + 'The `--debug` must be enabled.') + args = parser.parse_args() + return args + + +def main(): + args = parse_args() + + config = args.config + + if isinstance(config, (str, Path)): + config = Config.fromfile(config) + elif not isinstance(config, Config): + raise TypeError('config must be a filename or Config object, ' + f'but got {type(config)}') + if 'init_cfg' in config.model.backbone: + config.model.backbone.init_cfg = None + + if args.tta: + assert 'tta_model' in config, 'Cannot find ``tta_model`` in config.' \ + " Can't use tta !" + assert 'tta_pipeline' in config, 'Cannot find ``tta_pipeline`` ' \ + "in config. Can't use tta !" + config.model = ConfigDict(**config.tta_model, module=config.model) + test_data_cfg = config.test_dataloader.dataset + while 'dataset' in test_data_cfg: + test_data_cfg = test_data_cfg['dataset'] + + test_data_cfg.pipeline = config.tta_pipeline + + # TODO: TTA mode will error if cfg_options is not set. + # This is an mmdet issue and needs to be fixed later. + # build the model from a config file and a checkpoint file + model = init_detector( + config, args.checkpoint, device=args.device, cfg_options={}) + + if not os.path.exists(args.out_dir) and not args.show: + os.mkdir(args.out_dir) + + # init visualizer + visualizer = VISUALIZERS.build(model.cfg.visualizer) + visualizer.dataset_meta = model.dataset_meta + + # get file list + files, source_type = get_file_list(args.img) + + # start detector inference + print(f'Performing inference on {len(files)} images.... ' + 'This may take a while.') + progress_bar = ProgressBar(len(files)) + for file in files: + # read image + img = mmcv.imread(file) + + # arrange slices + height, width = img.shape[:2] + sliced_image_object = slice_image( + img, + slice_height=args.patch_size, + slice_width=args.patch_size, + auto_slice_resolution=False, + overlap_height_ratio=args.patch_overlap_ratio, + overlap_width_ratio=args.patch_overlap_ratio, + ) + # perform sliced inference + slice_results = [] + start = 0 + while True: + # prepare batch slices + end = min(start + args.batch_size, len(sliced_image_object)) + images = [] + for sliced_image in sliced_image_object.images[start:end]: + images.append(sliced_image) + + # forward the model + slice_results.extend(inference_detector(model, images)) + + if end >= len(sliced_image_object): + break + start += args.batch_size + + if source_type['is_dir']: + filename = os.path.relpath(file, args.img).replace('/', '_') + else: + filename = os.path.basename(file) + + img = mmcv.imconvert(img, 'bgr', 'rgb') + out_file = None if args.show else os.path.join(args.out_dir, filename) + + # export debug images + if args.debug: + # export sliced image results + name, suffix = os.path.splitext(filename) + + shifted_instances = shift_predictions( + slice_results, + sliced_image_object.starting_pixels, + src_image_shape=(height, width)) + merged_result = slice_results[0].clone() + merged_result.pred_instances = shifted_instances + + debug_file_name = name + '_debug' + suffix + debug_out_file = None if args.show else os.path.join( + args.out_dir, debug_file_name) + visualizer.set_image(img.copy()) + + debug_grids = [] + for starting_point in sliced_image_object.starting_pixels: + start_point_x = starting_point[0] + start_point_y = starting_point[1] + end_point_x = start_point_x + args.patch_size + end_point_y = start_point_y + args.patch_size + debug_grids.append( + [start_point_x, start_point_y, end_point_x, end_point_y]) + debug_grids = np.array(debug_grids) + debug_grids[:, 0::2] = np.clip(debug_grids[:, 0::2], 1, + img.shape[1] - 1) + debug_grids[:, 1::2] = np.clip(debug_grids[:, 1::2], 1, + img.shape[0] - 1) + + palette = np.random.randint(0, 256, size=(len(debug_grids), 3)) + palette = [tuple(c) for c in palette] + line_styles = random.choices(['-', '-.', ':'], k=len(debug_grids)) + visualizer.draw_bboxes( + debug_grids, + edge_colors=palette, + alpha=1, + line_styles=line_styles) + visualizer.draw_bboxes( + debug_grids, face_colors=palette, alpha=0.15) + + visualizer.draw_texts( + list(range(len(debug_grids))), + debug_grids[:, :2] + 5, + colors='w') + + visualizer.add_datasample( + debug_file_name, + visualizer.get_image(), + data_sample=merged_result, + draw_gt=False, + show=args.show, + wait_time=0, + out_file=debug_out_file, + pred_score_thr=args.score_thr, + ) + + if args.save_patch: + debug_patch_out_dir = os.path.join(args.out_dir, + f'{name}_patch') + for i, slice_result in enumerate(slice_results): + patch_out_file = os.path.join( + debug_patch_out_dir, + f'{filename}_slice_{i}_result.jpg') + image = mmcv.imconvert(sliced_image_object.images[i], + 'bgr', 'rgb') + + visualizer.add_datasample( + 'patch_result', + image, + data_sample=slice_result, + draw_gt=False, + show=False, + wait_time=0, + out_file=patch_out_file, + pred_score_thr=args.score_thr, + ) + + image_result = merge_results_by_nms( + slice_results, + sliced_image_object.starting_pixels, + src_image_shape=(height, width), + nms_cfg={ + 'type': args.merge_nms_type, + 'iou_threshold': args.merge_iou_thr + }) + + visualizer.add_datasample( + filename, + img, + data_sample=image_result, + draw_gt=False, + show=args.show, + wait_time=0, + out_file=out_file, + pred_score_thr=args.score_thr, + ) + progress_bar.update() + + if not args.show or (args.debug and args.save_patch): + print_log( + f'\nResults have been saved at {os.path.abspath(args.out_dir)}') + + +if __name__ == '__main__': + main() diff --git a/grounding-dino/mmdetection/demo/mot_demo.py b/grounding-dino/mmdetection/demo/mot_demo.py new file mode 100644 index 0000000000000000000000000000000000000000..4595cdc52d9863f23b5421fd2b4d6824c0c3fae7 --- /dev/null +++ b/grounding-dino/mmdetection/demo/mot_demo.py @@ -0,0 +1,130 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import os +import os.path as osp +import tempfile +from argparse import ArgumentParser + +import mmcv +import mmengine +from mmengine.registry import init_default_scope + +from mmdet.apis import inference_mot, init_track_model +from mmdet.registry import VISUALIZERS + +IMG_EXTENSIONS = ('.jpg', '.jpeg', '.png') + + +def parse_args(): + parser = ArgumentParser() + parser.add_argument( + 'inputs', type=str, help='Input image file or folder path.') + parser.add_argument('config', help='config file') + parser.add_argument('--checkpoint', help='checkpoint file') + parser.add_argument('--detector', help='det checkpoint file') + parser.add_argument('--reid', help='reid checkpoint file') + parser.add_argument( + '--device', default='cuda:0', help='device used for inference') + parser.add_argument( + '--score-thr', + type=float, + default=0.0, + help='The threshold of score to filter bboxes.') + parser.add_argument( + '--out', help='output video file (mp4 format) or folder') + parser.add_argument( + '--show', + action='store_true', + help='whether show the results on the fly') + parser.add_argument('--fps', help='FPS of the output video') + args = parser.parse_args() + return args + + +def main(args): + assert args.out or args.show + # load images + if osp.isdir(args.inputs): + imgs = sorted( + filter(lambda x: x.endswith(IMG_EXTENSIONS), + os.listdir(args.inputs)), + key=lambda x: int(x.split('.')[0])) + in_video = False + else: + imgs = mmcv.VideoReader(args.inputs) + in_video = True + + # define output + out_video = False + if args.out is not None: + if args.out.endswith('.mp4'): + out_video = True + out_dir = tempfile.TemporaryDirectory() + out_path = out_dir.name + _out = args.out.rsplit(os.sep, 1) + if len(_out) > 1: + os.makedirs(_out[0], exist_ok=True) + else: + out_path = args.out + os.makedirs(out_path, exist_ok=True) + + fps = args.fps + if args.show or out_video: + if fps is None and in_video: + fps = imgs.fps + if not fps: + raise ValueError('Please set the FPS for the output video.') + fps = int(fps) + + init_default_scope('mmdet') + + # build the model from a config file and a checkpoint file + model = init_track_model( + args.config, + args.checkpoint, + args.detector, + args.reid, + device=args.device) + + # build the visualizer + visualizer = VISUALIZERS.build(model.cfg.visualizer) + visualizer.dataset_meta = model.dataset_meta + + prog_bar = mmengine.ProgressBar(len(imgs)) + # test and show/save the images + for i, img in enumerate(imgs): + if isinstance(img, str): + img_path = osp.join(args.inputs, img) + img = mmcv.imread(img_path) + # result [TrackDataSample] + result = inference_mot(model, img, frame_id=i, video_len=len(imgs)) + if args.out is not None: + if in_video or out_video: + out_file = osp.join(out_path, f'{i:06d}.jpg') + else: + out_file = osp.join(out_path, img.rsplit(os.sep, 1)[-1]) + else: + out_file = None + + # show the results + visualizer.add_datasample( + 'mot', + img[..., ::-1], + data_sample=result[0], + show=args.show, + draw_gt=False, + out_file=out_file, + wait_time=float(1 / int(fps)) if fps else 0, + pred_score_thr=args.score_thr, + step=i) + + prog_bar.update() + + if args.out and out_video: + print(f'making the output video at {args.out} with a FPS of {fps}') + mmcv.frames2video(out_path, args.out, fps=fps, fourcc='mp4v') + out_dir.cleanup() + + +if __name__ == '__main__': + args = parse_args() + main(args) diff --git a/grounding-dino/mmdetection/demo/video_demo.py b/grounding-dino/mmdetection/demo/video_demo.py new file mode 100644 index 0000000000000000000000000000000000000000..f72d617695c849b9299bedab1c73a92c6c49845f --- /dev/null +++ b/grounding-dino/mmdetection/demo/video_demo.py @@ -0,0 +1,84 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import argparse + +import cv2 +import mmcv +from mmcv.transforms import Compose +from mmengine.utils import track_iter_progress + +from mmdet.apis import inference_detector, init_detector +from mmdet.registry import VISUALIZERS + + +def parse_args(): + parser = argparse.ArgumentParser(description='MMDetection video demo') + parser.add_argument('video', help='Video file') + parser.add_argument('config', help='Config file') + parser.add_argument('checkpoint', help='Checkpoint file') + parser.add_argument( + '--device', default='cuda:0', help='Device used for inference') + parser.add_argument( + '--score-thr', type=float, default=0.3, help='Bbox score threshold') + parser.add_argument('--out', type=str, help='Output video file') + parser.add_argument('--show', action='store_true', help='Show video') + parser.add_argument( + '--wait-time', + type=float, + default=1, + help='The interval of show (s), 0 is block') + args = parser.parse_args() + return args + + +def main(): + args = parse_args() + assert args.out or args.show, \ + ('Please specify at least one operation (save/show the ' + 'video) with the argument "--out" or "--show"') + + # build the model from a config file and a checkpoint file + model = init_detector(args.config, args.checkpoint, device=args.device) + + # build test pipeline + model.cfg.test_dataloader.dataset.pipeline[ + 0].type = 'mmdet.LoadImageFromNDArray' + test_pipeline = Compose(model.cfg.test_dataloader.dataset.pipeline) + + # init visualizer + visualizer = VISUALIZERS.build(model.cfg.visualizer) + # the dataset_meta is loaded from the checkpoint and + # then pass to the model in init_detector + visualizer.dataset_meta = model.dataset_meta + + video_reader = mmcv.VideoReader(args.video) + video_writer = None + if args.out: + fourcc = cv2.VideoWriter_fourcc(*'mp4v') + video_writer = cv2.VideoWriter( + args.out, fourcc, video_reader.fps, + (video_reader.width, video_reader.height)) + + for frame in track_iter_progress((video_reader, len(video_reader))): + result = inference_detector(model, frame, test_pipeline=test_pipeline) + visualizer.add_datasample( + name='video', + image=frame, + data_sample=result, + draw_gt=False, + show=False, + pred_score_thr=args.score_thr) + frame = visualizer.get_image() + + if args.show: + cv2.namedWindow('video', 0) + mmcv.imshow(frame, 'video', args.wait_time) + if args.out: + video_writer.write(frame) + + if video_writer: + video_writer.release() + cv2.destroyAllWindows() + + +if __name__ == '__main__': + main() diff --git a/grounding-dino/mmdetection/demo/video_gpuaccel_demo.py b/grounding-dino/mmdetection/demo/video_gpuaccel_demo.py new file mode 100644 index 0000000000000000000000000000000000000000..3b091647b5ef0fc06207bb99e48a9c96f74d2823 --- /dev/null +++ b/grounding-dino/mmdetection/demo/video_gpuaccel_demo.py @@ -0,0 +1,144 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import argparse +from typing import Tuple + +import cv2 +import mmcv +import numpy as np +import torch +import torch.nn as nn +from mmcv.transforms import Compose +from mmengine.utils import track_iter_progress + +from mmdet.apis import init_detector +from mmdet.registry import VISUALIZERS +from mmdet.structures import DetDataSample + +try: + import ffmpegcv +except ImportError: + raise ImportError( + 'Please install ffmpegcv with:\n\n pip install ffmpegcv') + + +def parse_args(): + parser = argparse.ArgumentParser( + description='MMDetection video demo with GPU acceleration') + parser.add_argument('video', help='Video file') + parser.add_argument('config', help='Config file') + parser.add_argument('checkpoint', help='Checkpoint file') + parser.add_argument( + '--device', default='cuda:0', help='Device used for inference') + parser.add_argument( + '--score-thr', type=float, default=0.3, help='Bbox score threshold') + parser.add_argument('--out', type=str, help='Output video file') + parser.add_argument('--show', action='store_true', help='Show video') + parser.add_argument( + '--nvdecode', action='store_true', help='Use NVIDIA decoder') + parser.add_argument( + '--wait-time', + type=float, + default=1, + help='The interval of show (s), 0 is block') + args = parser.parse_args() + return args + + +def prefetch_batch_input_shape(model: nn.Module, ori_wh: Tuple[int, + int]) -> dict: + cfg = model.cfg + w, h = ori_wh + cfg.test_dataloader.dataset.pipeline[0].type = 'LoadImageFromNDArray' + test_pipeline = Compose(cfg.test_dataloader.dataset.pipeline) + data = {'img': np.zeros((h, w, 3), dtype=np.uint8), 'img_id': 0} + data = test_pipeline(data) + data['inputs'] = [data['inputs']] + data['data_samples'] = [data['data_samples']] + data_sample = model.data_preprocessor(data, False)['data_samples'] + batch_input_shape = data_sample[0].batch_input_shape + return batch_input_shape + + +def pack_data(frame_resize: np.ndarray, batch_input_shape: Tuple[int, int], + ori_shape: Tuple[int, int]) -> dict: + assert frame_resize.shape[:2] == batch_input_shape + data_sample = DetDataSample() + data_sample.set_metainfo({ + 'img_shape': + batch_input_shape, + 'ori_shape': + ori_shape, + 'scale_factor': (batch_input_shape[0] / ori_shape[0], + batch_input_shape[1] / ori_shape[1]) + }) + frame_resize = torch.from_numpy(frame_resize).permute((2, 0, 1)).cuda() + data = {'inputs': [frame_resize], 'data_samples': [data_sample]} + return data + + +def main(): + args = parse_args() + assert args.out or args.show, \ + ('Please specify at least one operation (save/show the ' + 'video) with the argument "--out" or "--show"') + + model = init_detector(args.config, args.checkpoint, device=args.device) + + # init visualizer + visualizer = VISUALIZERS.build(model.cfg.visualizer) + # the dataset_meta is loaded from the checkpoint and + # then pass to the model in init_detector + visualizer.dataset_meta = model.dataset_meta + + if args.nvdecode: + VideoCapture = ffmpegcv.VideoCaptureNV + else: + VideoCapture = ffmpegcv.VideoCapture + video_origin = VideoCapture(args.video) + + batch_input_shape = prefetch_batch_input_shape( + model, (video_origin.width, video_origin.height)) + ori_shape = (video_origin.height, video_origin.width) + resize_wh = batch_input_shape[::-1] + video_resize = VideoCapture( + args.video, + resize=resize_wh, + resize_keepratio=True, + resize_keepratioalign='topleft') + + video_writer = None + if args.out: + video_writer = ffmpegcv.VideoWriter(args.out, fps=video_origin.fps) + + with torch.no_grad(): + for i, (frame_resize, frame_origin) in enumerate( + zip(track_iter_progress(video_resize), video_origin)): + data = pack_data(frame_resize, batch_input_shape, ori_shape) + result = model.test_step(data)[0] + + visualizer.add_datasample( + name='video', + image=frame_origin, + data_sample=result, + draw_gt=False, + show=False, + pred_score_thr=args.score_thr) + + frame_mask = visualizer.get_image() + + if args.show: + cv2.namedWindow('video', 0) + mmcv.imshow(frame_mask, 'video', args.wait_time) + if args.out: + video_writer.write(frame_mask) + + if video_writer: + video_writer.release() + video_origin.release() + video_resize.release() + + cv2.destroyAllWindows() + + +if __name__ == '__main__': + main() diff --git a/grounding-dino/mmdetection/demo/webcam_demo.py b/grounding-dino/mmdetection/demo/webcam_demo.py new file mode 100644 index 0000000000000000000000000000000000000000..d090030377960274b60a09aa347a66e18c88251f --- /dev/null +++ b/grounding-dino/mmdetection/demo/webcam_demo.py @@ -0,0 +1,65 @@ +# Copyright (c) OpenMMLab. All rights reserved. +import argparse + +import cv2 +import mmcv +import torch + +from mmdet.apis import inference_detector, init_detector +from mmdet.registry import VISUALIZERS + + +def parse_args(): + parser = argparse.ArgumentParser(description='MMDetection webcam demo') + parser.add_argument('config', help='test config file path') + parser.add_argument('checkpoint', help='checkpoint file') + parser.add_argument( + '--device', type=str, default='cuda:0', help='CPU/CUDA device option') + parser.add_argument( + '--camera-id', type=int, default=0, help='camera device id') + parser.add_argument( + '--score-thr', type=float, default=0.5, help='bbox score threshold') + args = parser.parse_args() + return args + + +def main(): + args = parse_args() + + # build the model from a config file and a checkpoint file + device = torch.device(args.device) + model = init_detector(args.config, args.checkpoint, device=device) + + # init visualizer + visualizer = VISUALIZERS.build(model.cfg.visualizer) + # the dataset_meta is loaded from the checkpoint and + # then pass to the model in init_detector + visualizer.dataset_meta = model.dataset_meta + + camera = cv2.VideoCapture(args.camera_id) + + print('Press "Esc", "q" or "Q" to exit.') + while True: + ret_val, img = camera.read() + result = inference_detector(model, img) + + img = mmcv.imconvert(img, 'bgr', 'rgb') + visualizer.add_datasample( + name='result', + image=img, + data_sample=result, + draw_gt=False, + pred_score_thr=args.score_thr, + show=False) + + img = visualizer.get_image() + img = mmcv.imconvert(img, 'bgr', 'rgb') + cv2.imshow('result', img) + + ch = cv2.waitKey(1) + if ch == 27 or ch == ord('q') or ch == ord('Q'): + break + + +if __name__ == '__main__': + main() diff --git a/grounding-dino/mmdetection/docker/Dockerfile b/grounding-dino/mmdetection/docker/Dockerfile new file mode 100644 index 0000000000000000000000000000000000000000..2737ec0efce53fc0ed1542451262d153845aaff5 --- /dev/null +++ b/grounding-dino/mmdetection/docker/Dockerfile @@ -0,0 +1,40 @@ +ARG PYTORCH="1.9.0" +ARG CUDA="11.1" +ARG CUDNN="8" + +FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel + +ENV TORCH_CUDA_ARCH_LIST="6.0 6.1 7.0 7.5 8.0 8.6+PTX" \ + TORCH_NVCC_FLAGS="-Xfatbin -compress-all" \ + CMAKE_PREFIX_PATH="$(dirname $(which conda))/../" \ + FORCE_CUDA="1" + +# Avoid Public GPG key error +# https://github.com/NVIDIA/nvidia-docker/issues/1631 +RUN rm /etc/apt/sources.list.d/cuda.list \ + && rm /etc/apt/sources.list.d/nvidia-ml.list \ + && apt-key del 7fa2af80 \ + && apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/3bf863cc.pub \ + && apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64/7fa2af80.pub + +# (Optional, use Mirror to speed up downloads) +# RUN sed -i 's/http:\/\/archive.ubuntu.com\/ubuntu\//http:\/\/mirrors.aliyun.com\/ubuntu\//g' /etc/apt/sources.list && \ +# pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple + +# Install the required packages +RUN apt-get update \ + && apt-get install -y ffmpeg libsm6 libxext6 git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 \ + && apt-get clean \ + && rm -rf /var/lib/apt/lists/* + +# Install MMEngine and MMCV +RUN pip install openmim && \ + mim install "mmengine>=0.7.1" "mmcv>=2.0.0rc4" + +# Install MMDetection +RUN conda clean --all \ + && git clone https://github.com/open-mmlab/mmdetection.git /mmdetection \ + && cd /mmdetection \ + && pip install --no-cache-dir -e . + +WORKDIR /mmdetection diff --git a/grounding-dino/mmdetection/docker/serve/Dockerfile b/grounding-dino/mmdetection/docker/serve/Dockerfile new file mode 100644 index 0000000000000000000000000000000000000000..aa307cf6963d5474af6d28943b086668b95cf397 --- /dev/null +++ b/grounding-dino/mmdetection/docker/serve/Dockerfile @@ -0,0 +1,62 @@ +ARG PYTORCH="1.9.0" +ARG CUDA="11.1" +ARG CUDNN="8" +FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel + +ARG MMCV="2.0.0rc4" +ARG MMDET="3.3.0" + +ENV PYTHONUNBUFFERED TRUE + +# Avoid Public GPG key error +# https://github.com/NVIDIA/nvidia-docker/issues/1631 +RUN rm /etc/apt/sources.list.d/cuda.list \ + && rm /etc/apt/sources.list.d/nvidia-ml.list \ + && apt-key del 7fa2af80 \ + && apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/3bf863cc.pub \ + && apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64/7fa2af80.pub + +# (Optional, use Mirror to speed up downloads) +# RUN sed -i 's/http:\/\/archive.ubuntu.com\/ubuntu\//http:\/\/mirrors.aliyun.com\/ubuntu\//g' /etc/apt/sources.list + +# Install the required packages +RUN apt-get update && \ + DEBIAN_FRONTEND=noninteractive apt-get install --no-install-recommends -y \ + ca-certificates \ + g++ \ + openjdk-11-jre-headless \ + # MMDet Requirements + ffmpeg libsm6 libxext6 git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 \ + && rm -rf /var/lib/apt/lists/* + +ENV PATH="/opt/conda/bin:$PATH" \ + FORCE_CUDA="1" + +# TORCHSEVER +RUN pip install torchserve torch-model-archiver + +# MMLAB +ARG PYTORCH +ARG CUDA +RUN pip install mmengine +RUN ["/bin/bash", "-c", "pip install mmcv==${MMCV} -f https://download.openmmlab.com/mmcv/dist/cu${CUDA//./}/torch${PYTORCH}/index.html"] +RUN pip install mmdet==${MMDET} + +RUN useradd -m model-server \ + && mkdir -p /home/model-server/tmp + +COPY entrypoint.sh /usr/local/bin/entrypoint.sh + +RUN chmod +x /usr/local/bin/entrypoint.sh \ + && chown -R model-server /home/model-server + +COPY config.properties /home/model-server/config.properties +RUN mkdir /home/model-server/model-store && chown -R model-server /home/model-server/model-store + +EXPOSE 8080 8081 8082 + +USER model-server +WORKDIR /home/model-server +ENV TEMP=/home/model-server/tmp +ENTRYPOINT ["/usr/local/bin/entrypoint.sh"] +CMD ["serve"] diff --git a/grounding-dino/mmdetection/docker/serve/config.properties b/grounding-dino/mmdetection/docker/serve/config.properties new file mode 100644 index 0000000000000000000000000000000000000000..efb9c47e40ab550bac765611e6c6c6f2a7152f11 --- /dev/null +++ b/grounding-dino/mmdetection/docker/serve/config.properties @@ -0,0 +1,5 @@ +inference_address=http://0.0.0.0:8080 +management_address=http://0.0.0.0:8081 +metrics_address=http://0.0.0.0:8082 +model_store=/home/model-server/model-store +load_models=all diff --git a/grounding-dino/mmdetection/docker/serve/entrypoint.sh b/grounding-dino/mmdetection/docker/serve/entrypoint.sh new file mode 100644 index 0000000000000000000000000000000000000000..41ba00b048aed84b45c5a8015a016ff148e97d86 --- /dev/null +++ b/grounding-dino/mmdetection/docker/serve/entrypoint.sh @@ -0,0 +1,12 @@ +#!/bin/bash +set -e + +if [[ "$1" = "serve" ]]; then + shift 1 + torchserve --start --ts-config /home/model-server/config.properties +else + eval "$@" +fi + +# prevent docker exit +tail -f /dev/null diff --git a/grounding-dino/mmdetection/docker/serve_cn/Dockerfile b/grounding-dino/mmdetection/docker/serve_cn/Dockerfile new file mode 100644 index 0000000000000000000000000000000000000000..894e15dd714a406d8e5910eddf3e3fd08d0b0b46 --- /dev/null +++ b/grounding-dino/mmdetection/docker/serve_cn/Dockerfile @@ -0,0 +1,65 @@ +ARG PYTORCH="1.9.0" +ARG CUDA="11.1" +ARG CUDNN="8" +FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel + +ARG MMCV="2.0.0rc4" +ARG MMDET="3.3.0" + +ENV PYTHONUNBUFFERED TRUE + +# Avoid Public GPG key error +# - https://github.com/NVIDIA/nvidia-docker/issues/1631 +RUN rm /etc/apt/sources.list.d/cuda.list \ + && rm /etc/apt/sources.list.d/nvidia-ml.list \ + && apt-get update \ + && apt-get install -y wget \ + && rm -rf /var/lib/apt/lists/* \ + && apt-key del 7fa2af80 \ + && apt-get update && apt-get install -y --no-install-recommends wget \ + && wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu1804/x86_64/cuda-keyring_1.0-1_all.deb \ + && dpkg -i cuda-keyring_1.0-1_all.deb +# (Optional, use Mirror to speed up downloads) +# RUN sed -i 's/http:\/\/archive.ubuntu.com\/ubuntu\//http:\/\/mirrors.aliyun.com\/ubuntu\//g' /etc/apt/sources.list + +# Install the required packages +RUN apt-get update && \ + DEBIAN_FRONTEND=noninteractive apt-get install --no-install-recommends -y \ + ca-certificates \ + g++ \ + openjdk-11-jre-headless \ + # MMDet Requirements + ffmpeg libsm6 libxext6 git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 \ + && rm -rf /var/lib/apt/lists/* + +ENV PATH="/opt/conda/bin:$PATH" \ + FORCE_CUDA="1" + +# TORCHSEVER +RUN pip install torchserve torch-model-archiver nvgpu -i https://pypi.mirrors.ustc.edu.cn/simple/ + +# MMLAB +ARG PYTORCH +ARG CUDA +RUN pip install mmengine -i https://pypi.mirrors.ustc.edu.cn/simple/ +RUN ["/bin/bash", "-c", "pip install mmcv==${MMCV} -f https://download.openmmlab.com/mmcv/dist/cu${CUDA//./}/torch${PYTORCH}/index.html"] +RUN pip install mmdet==${MMDET} -i https://pypi.mirrors.ustc.edu.cn/simple/ + +RUN useradd -m model-server \ + && mkdir -p /home/model-server/tmp + +COPY entrypoint.sh /usr/local/bin/entrypoint.sh + +RUN chmod +x /usr/local/bin/entrypoint.sh \ + && chown -R model-server /home/model-server + +COPY config.properties /home/model-server/config.properties +RUN mkdir /home/model-server/model-store && chown -R model-server /home/model-server/model-store + +EXPOSE 8080 8081 8082 + +USER model-server +WORKDIR /home/model-server +ENV TEMP=/home/model-server/tmp +ENTRYPOINT ["/usr/local/bin/entrypoint.sh"] +CMD ["serve"] diff --git a/grounding-dino/mmdetection/docs/en/Makefile b/grounding-dino/mmdetection/docs/en/Makefile new file mode 100644 index 0000000000000000000000000000000000000000..d4bb2cbb9eddb1bb1b4f366623044af8e4830919 --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/Makefile @@ -0,0 +1,20 @@ +# Minimal makefile for Sphinx documentation +# + +# You can set these variables from the command line, and also +# from the environment for the first two. +SPHINXOPTS ?= +SPHINXBUILD ?= sphinx-build +SOURCEDIR = . +BUILDDIR = _build + +# Put it first so that "make" without argument is like "make help". +help: + @$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O) + +.PHONY: help Makefile + +# Catch-all target: route all unknown targets to Sphinx using the new +# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS). +%: Makefile + @$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O) diff --git a/grounding-dino/mmdetection/docs/en/_static/css/readthedocs.css b/grounding-dino/mmdetection/docs/en/_static/css/readthedocs.css new file mode 100644 index 0000000000000000000000000000000000000000..57ed0ad084827ae75f5c58d3799ff5cfa6e40600 --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/_static/css/readthedocs.css @@ -0,0 +1,6 @@ +.header-logo { + background-image: url("../image/mmdet-logo.png"); + background-size: 156px 40px; + height: 40px; + width: 156px; +} diff --git a/grounding-dino/mmdetection/docs/en/advanced_guides/conventions.md b/grounding-dino/mmdetection/docs/en/advanced_guides/conventions.md new file mode 100644 index 0000000000000000000000000000000000000000..da159ac699f741d07bf89c15bee5a79740a2315c --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/advanced_guides/conventions.md @@ -0,0 +1,111 @@ +# Conventions + +Please check the following conventions if you would like to modify MMDetection as your own project. + +## About the order of image shape + +In OpenMMLab 2.0, to be consistent with the input argument of OpenCV, the argument about image shape in the data transformation pipeline is always in the `(width, height)` order. On the contrary, for computation convenience, the order of the field going through the data pipeline and the model is `(height, width)`. Specifically, in the results processed by each data transform pipeline, the fields and their value meaning is as below: + +- img_shape: (height, width) +- ori_shape: (height, width) +- pad_shape: (height, width) +- batch_input_shape: (height, width) + +As an example, the initialization arguments of `Mosaic` are as below: + +```python +@TRANSFORMS.register_module() +class Mosaic(BaseTransform): + def __init__(self, + img_scale: Tuple[int, int] = (640, 640), + center_ratio_range: Tuple[float, float] = (0.5, 1.5), + bbox_clip_border: bool = True, + pad_val: float = 114.0, + prob: float = 1.0) -> None: + ... + + # img_scale order should be (width, height) + self.img_scale = img_scale + + def transform(self, results: dict) -> dict: + ... + + results['img'] = mosaic_img + # (height, width) + results['img_shape'] = mosaic_img.shape[:2] +``` + +## Loss + +In MMDetection, a `dict` containing losses and metrics will be returned by `model(**data)`. + +For example, in bbox head, + +```python +class BBoxHead(nn.Module): + ... + def loss(self, ...): + losses = dict() + # classification loss + losses['loss_cls'] = self.loss_cls(...) + # classification accuracy + losses['acc'] = accuracy(...) + # bbox regression loss + losses['loss_bbox'] = self.loss_bbox(...) + return losses +``` + +`bbox_head.loss()` will be called during model forward. +The returned dict contains `'loss_bbox'`, `'loss_cls'`, `'acc'` . +Only `'loss_bbox'`, `'loss_cls'` will be used during back propagation, +`'acc'` will only be used as a metric to monitor training process. + +By default, only values whose keys contain `'loss'` will be back propagated. +This behavior could be changed by modifying `BaseDetector.train_step()`. + +## Empty Proposals + +In MMDetection, We have added special handling and unit test for empty proposals of two-stage. We need to deal with the empty proposals of the entire batch and single image at the same time. For example, in CascadeRoIHead, + +```python +# simple_test method +... +# There is no proposal in the whole batch +if rois.shape[0] == 0: + bbox_results = [[ + np.zeros((0, 5), dtype=np.float32) + for _ in range(self.bbox_head[-1].num_classes) + ]] * num_imgs + if self.with_mask: + mask_classes = self.mask_head[-1].num_classes + segm_results = [[[] for _ in range(mask_classes)] + for _ in range(num_imgs)] + results = list(zip(bbox_results, segm_results)) + else: + results = bbox_results + return results +... + +# There is no proposal in the single image +for i in range(self.num_stages): + ... + if i < self.num_stages - 1: + for j in range(num_imgs): + # Handle empty proposal + if rois[j].shape[0] > 0: + bbox_label = cls_score[j][:, :-1].argmax(dim=1) + refine_roi = self.bbox_head[i].regress_by_class( + rois[j], bbox_label, bbox_pred[j], img_metas[j]) + refine_roi_list.append(refine_roi) +``` + +If you have customized `RoIHead`, you can refer to the above method to deal with empty proposals. + +## Coco Panoptic Dataset + +In MMDetection, we have supported COCO Panoptic dataset. We clarify a few conventions about the implementation of `CocoPanopticDataset` here. + +1. For mmdet\<=2.16.0, the range of foreground and background labels in semantic segmentation are different from the default setting of MMDetection. The label `0` stands for `VOID` label and the category labels start from `1`. + Since mmdet=2.17.0, the category labels of semantic segmentation start from `0` and label `255` stands for `VOID` for consistency with labels of bounding boxes. + To achieve that, the `Pad` pipeline supports setting the padding value for `seg`. +2. In the evaluation, the panoptic result is a map with the same shape as the original image. Each value in the result map has the format of `instance_id * INSTANCE_OFFSET + category_id`. diff --git a/grounding-dino/mmdetection/docs/en/advanced_guides/customize_dataset.md b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_dataset.md new file mode 100644 index 0000000000000000000000000000000000000000..3d63d12c61a436563f7318e766089b6ce48dda79 --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_dataset.md @@ -0,0 +1,433 @@ +# Customize Datasets + +## Support new data format + +To support a new data format, you can either convert them to existing formats (COCO format or PASCAL format) or directly convert them to the middle format. You could also choose to convert them offline (before training by a script) or online (implement a new dataset and do the conversion at training). In MMDetection, we recommend to convert the data into COCO formats and do the conversion offline, thus you only need to modify the config's data annotation paths and classes after the conversion of your data. + +### Reorganize new data formats to existing format + +The simplest way is to convert your dataset to existing dataset formats (COCO or PASCAL VOC). + +The annotation JSON files in COCO format has the following necessary keys: + +```python +'images': [ + { + 'file_name': 'COCO_val2014_000000001268.jpg', + 'height': 427, + 'width': 640, + 'id': 1268 + }, + ... +], + +'annotations': [ + { + 'segmentation': [[192.81, + 247.09, + ... + 219.03, + 249.06]], # If you have mask labels, and it is in polygon XY point coordinate format, you need to ensure that at least 3 point coordinates are included. Otherwise, it is an invalid polygon. + 'area': 1035.749, + 'iscrowd': 0, + 'image_id': 1268, + 'bbox': [192.81, 224.8, 74.73, 33.43], + 'category_id': 16, + 'id': 42986 + }, + ... +], + +'categories': [ + {'id': 0, 'name': 'car'}, + ] +``` + +There are three necessary keys in the JSON file: + +- `images`: contains a list of images with their information like `file_name`, `height`, `width`, and `id`. +- `annotations`: contains the list of instance annotations. +- `categories`: contains the list of categories names and their ID. + +After the data pre-processing, there are two steps for users to train the customized new dataset with existing format (e.g. COCO format): + +1. Modify the config file for using the customized dataset. +2. Check the annotations of the customized dataset. + +Here we give an example to show the above two steps, which uses a customized dataset of 5 classes with COCO format to train an existing Cascade Mask R-CNN R50-FPN detector. + +#### 1. Modify the config file for using the customized dataset + +There are two aspects involved in the modification of config file: + +1. The `data` field. Specifically, you need to explicitly add the `metainfo=dict(classes=classes)` fields in `train_dataloader.dataset`, `val_dataloader.dataset` and `test_dataloader.dataset` and `classes` must be a tuple type. +2. The `num_classes` field in the `model` part. Explicitly over-write all the `num_classes` from default value (e.g. 80 in COCO) to your classes number. + +In `configs/my_custom_config.py`: + +```python + +# the new config inherits the base configs to highlight the necessary modification +_base_ = './cascade_mask_rcnn_r50_fpn_1x_coco.py' + +# 1. dataset settings +dataset_type = 'CocoDataset' +classes = ('a', 'b', 'c', 'd', 'e') +data_root='path/to/your/' + +train_dataloader = dict( + batch_size=2, + num_workers=2, + dataset=dict( + type=dataset_type, + # explicitly add your class names to the field `metainfo` + metainfo=dict(classes=classes), + data_root=data_root, + ann_file='train/annotation_data', + data_prefix=dict(img='train/image_data') + ) + ) + +val_dataloader = dict( + batch_size=1, + num_workers=2, + dataset=dict( + type=dataset_type, + test_mode=True, + # explicitly add your class names to the field `metainfo` + metainfo=dict(classes=classes), + data_root=data_root, + ann_file='val/annotation_data', + data_prefix=dict(img='val/image_data') + ) + ) + +test_dataloader = dict( + batch_size=1, + num_workers=2, + dataset=dict( + type=dataset_type, + test_mode=True, + # explicitly add your class names to the field `metainfo` + metainfo=dict(classes=classes), + data_root=data_root, + ann_file='test/annotation_data', + data_prefix=dict(img='test/image_data') + ) + ) + +# 2. model settings + +# explicitly over-write all the `num_classes` field from default 80 to 5. +model = dict( + roi_head=dict( + bbox_head=[ + dict( + type='Shared2FCBBoxHead', + # explicitly over-write all the `num_classes` field from default 80 to 5. + num_classes=5), + dict( + type='Shared2FCBBoxHead', + # explicitly over-write all the `num_classes` field from default 80 to 5. + num_classes=5), + dict( + type='Shared2FCBBoxHead', + # explicitly over-write all the `num_classes` field from default 80 to 5. + num_classes=5)], + # explicitly over-write all the `num_classes` field from default 80 to 5. + mask_head=dict(num_classes=5))) +``` + +#### 2. Check the annotations of the customized dataset + +Assuming your customized dataset is COCO format, make sure you have the correct annotations in the customized dataset: + +1. The length for `categories` field in annotations should exactly equal the tuple length of `classes` fields in your config, meaning the number of classes (e.g. 5 in this example). +2. The `classes` fields in your config file should have exactly the same elements and the same order with the `name` in `categories` of annotations. MMDetection automatically maps the uncontinuous `id` in `categories` to the continuous label indices, so the string order of `name` in `categories` field affects the order of label indices. Meanwhile, the string order of `classes` in config affects the label text during visualization of predicted bounding boxes. +3. The `category_id` in `annotations` field should be valid, i.e., all values in `category_id` should belong to `id` in `categories`. + +Here is a valid example of annotations: + +```python + +'annotations': [ + { + 'segmentation': [[192.81, + 247.09, + ... + 219.03, + 249.06]], # if you have mask labels + 'area': 1035.749, + 'iscrowd': 0, + 'image_id': 1268, + 'bbox': [192.81, 224.8, 74.73, 33.43], + 'category_id': 16, + 'id': 42986 + }, + ... +], + +# MMDetection automatically maps the uncontinuous `id` to the continuous label indices. +'categories': [ + {'id': 1, 'name': 'a'}, {'id': 3, 'name': 'b'}, {'id': 4, 'name': 'c'}, {'id': 16, 'name': 'd'}, {'id': 17, 'name': 'e'}, + ] +``` + +We use this way to support CityScapes dataset. The script is in [cityscapes.py](../../../tools/dataset_converters/cityscapes.py) and we also provide the finetuning [configs](../../../configs/cityscapes). + +**Note** + +1. For instance segmentation datasets, **MMDetection only supports evaluating mask AP of dataset in COCO format for now**. +2. It is recommended to convert the data offline before training, thus you can still use `CocoDataset` and only need to modify the path of annotations and the training classes. + +### Reorganize new data format to middle format + +It is also fine if you do not want to convert the annotation format to COCO or PASCAL format. +Actually, we define a simple annotation format in MMEninge's [BaseDataset](https://github.com/open-mmlab/mmengine/blob/main/mmengine/dataset/base_dataset.py#L116) and all existing datasets are +processed to be compatible with it, either online or offline. + +The annotation of the dataset must be in `json` or `yaml`, `yml` or `pickle`, `pkl` format; the dictionary stored in the annotation file must contain two fields `metainfo` and `data_list`. The `metainfo` is a dictionary, which contains the metadata of the dataset, such as class information; `data_list` is a list, each element in the list is a dictionary, the dictionary defines the raw data of one image, and each raw data contains a or several training/testing samples. + +Here is an example. + +```python +{ + 'metainfo': + { + 'classes': ('person', 'bicycle', 'car', 'motorcycle'), + ... + }, + 'data_list': + [ + { + "img_path": "xxx/xxx_1.jpg", + "height": 604, + "width": 640, + "instances": + [ + { + "bbox": [0, 0, 10, 20], + "bbox_label": 1, + "ignore_flag": 0 + }, + { + "bbox": [10, 10, 110, 120], + "bbox_label": 2, + "ignore_flag": 0 + } + ] + }, + { + "img_path": "xxx/xxx_2.jpg", + "height": 320, + "width": 460, + "instances": + [ + { + "bbox": [10, 0, 20, 20], + "bbox_label": 3, + "ignore_flag": 1, + } + ] + }, + ... + ] +} +``` + +Some datasets may provide annotations like crowd/difficult/ignored bboxes, we use `ignore_flag`to cover them. + +After obtaining the above standard data annotation format, you can directly use [BaseDetDataset](../../../mmdet/datasets/base_det_dataset.py#L13) of MMDetection in the configuration , without conversion. + +### An example of customized dataset + +Assume the annotation is in a new format in text files. +The bounding boxes annotations are stored in text file `annotation.txt` as the following + +``` +# +000001.jpg +1280 720 +2 +10 20 40 60 1 +20 40 50 60 2 +# +000002.jpg +1280 720 +3 +50 20 40 60 2 +20 40 30 45 2 +30 40 50 60 3 +``` + +We can create a new dataset in `mmdet/datasets/my_dataset.py` to load the data. + +```python +import mmengine + +from mmdet.base_det_dataset import BaseDetDataset +from mmdet.registry import DATASETS + + +@DATASETS.register_module() +class MyDataset(BaseDetDataset): + + METAINFO = { + 'classes': ('person', 'bicycle', 'car', 'motorcycle'), + 'palette': [(220, 20, 60), (119, 11, 32), (0, 0, 142), (0, 0, 230)] + } + + def load_data_list(self, ann_file): + ann_list = mmengine.list_from_file(ann_file) + + data_infos = [] + for i, ann_line in enumerate(ann_list): + if ann_line != '#': + continue + + img_shape = ann_list[i + 2].split(' ') + width = int(img_shape[0]) + height = int(img_shape[1]) + bbox_number = int(ann_list[i + 3]) + + instances = [] + for anns in ann_list[i + 4:i + 4 + bbox_number]: + instance = {} + instance['bbox'] = [float(ann) for ann in anns.split(' ')[:4]] + instance['bbox_label']=int(anns[4]) + instances.append(instance) + + data_infos.append( + dict( + img_path=ann_list[i + 1], + img_id=i, + width=width, + height=height, + instances=instances + )) + + return data_infos +``` + +Then in the config, to use `MyDataset` you can modify the config as the following + +```python +dataset_A_train = dict( + type='MyDataset', + ann_file = 'image_list.txt', + pipeline=train_pipeline +) +``` + +## Customize datasets by dataset wrappers + +MMEngine also supports many dataset wrappers to mix the dataset or modify the dataset distribution for training. +Currently it supports to three dataset wrappers as below: + +- `RepeatDataset`: simply repeat the whole dataset. +- `ClassBalancedDataset`: repeat dataset in a class balanced manner. +- `ConcatDataset`: concat datasets. + +For detailed usage, see [MMEngine Dataset Wrapper](#TODO). + +## Modify Dataset Classes + +With existing dataset types, we can modify the metainfo of them to train subset of the annotations. +For example, if you want to train only three classes of the current dataset, +you can modify the classes of dataset. +The dataset will filter out the ground truth boxes of other classes automatically. + +```python +classes = ('person', 'bicycle', 'car') +train_dataloader = dict( + dataset=dict( + metainfo=dict(classes=classes)) + ) +val_dataloader = dict( + dataset=dict( + metainfo=dict(classes=classes)) + ) +test_dataloader = dict( + dataset=dict( + metainfo=dict(classes=classes)) + ) +``` + +**Note**: + +- Before MMDetection v2.5.0, the dataset will filter out the empty GT images automatically if the classes are set and there is no way to disable that through config. This is an undesirable behavior and introduces confusion because if the classes are not set, the dataset only filter the empty GT images when `filter_empty_gt=True` and `test_mode=False`. After MMDetection v2.5.0, we decouple the image filtering process and the classes modification, i.e., the dataset will only filter empty GT images when `filter_cfg=dict(filter_empty_gt=True)` and `test_mode=False`, no matter whether the classes are set. Thus, setting the classes only influences the annotations of classes used for training and users could decide whether to filter empty GT images by themselves. +- When directly using `BaseDataset` in MMEngine or `BaseDetDataset` in MMDetection, users cannot filter images without GT by modifying the configuration, but it can be solved in an offline way. +- Please remember to modify the `num_classes` in the head when specifying `classes` in dataset. We implemented [NumClassCheckHook](../../../mmdet/engine/hooks/num_class_check_hook.py) to check whether the numbers are consistent since v2.9.0(after PR#4508). + +## COCO Panoptic Dataset + +Now we support COCO Panoptic Dataset, the format of panoptic annotations is different from COCO format. +Both the foreground and the background will exist in the annotation file. +The annotation json files in COCO Panoptic format has the following necessary keys: + +```python +'images': [ + { + 'file_name': '000000001268.jpg', + 'height': 427, + 'width': 640, + 'id': 1268 + }, + ... +] + +'annotations': [ + { + 'filename': '000000001268.jpg', + 'image_id': 1268, + 'segments_info': [ + { + 'id':8345037, # One-to-one correspondence with the id in the annotation map. + 'category_id': 51, + 'iscrowd': 0, + 'bbox': (x1, y1, w, h), # The bbox of the background is the outer rectangle of its mask. + 'area': 24315 + }, + ... + ] + }, + ... +] + +'categories': [ # including both foreground categories and background categories + {'id': 0, 'name': 'person'}, + ... + ] +``` + +Moreover, the `seg` must be set to the path of the panoptic annotation images. + +```python +dataset_type = 'CocoPanopticDataset' +data_root='path/to/your/' + +train_dataloader = dict( + dataset=dict( + type=dataset_type, + data_root=data_root, + data_prefix=dict( + img='train/image_data/', seg='train/panoptic/image_annotation_data/') + ) +) +val_dataloader = dict( + dataset=dict( + type=dataset_type, + data_root=data_root, + data_prefix=dict( + img='val/image_data/', seg='val/panoptic/image_annotation_data/') + ) +) +test_dataloader = dict( + dataset=dict( + type=dataset_type, + data_root=data_root, + data_prefix=dict( + img='test/image_data/', seg='test/panoptic/image_annotation_data/') + ) +) +``` diff --git a/grounding-dino/mmdetection/docs/en/advanced_guides/customize_losses.md b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_losses.md new file mode 100644 index 0000000000000000000000000000000000000000..3120dc01ffe4b11e75eb1e43632cbbfe6f1b05c8 --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_losses.md @@ -0,0 +1,126 @@ +# Customize Losses + +MMDetection provides users with different loss functions. But the default configuration may be not applicable for different datasets or models, so users may want to modify a specific loss to adapt the new situation. + +This tutorial first elaborate the computation pipeline of losses, then give some instructions about how to modify each step. The modification can be categorized as tweaking and weighting. + +## Computation pipeline of a loss + +Given the input prediction and target, as well as the weights, a loss function maps the input tensor to the final loss scalar. The mapping can be divided into five steps: + +1. Set the sampling method to sample positive and negative samples. + +2. Get **element-wise** or **sample-wise** loss by the loss kernel function. + +3. Weighting the loss with a weight tensor **element-wisely**. + +4. Reduce the loss tensor to a **scalar**. + +5. Weighting the loss with a **scalar**. + +## Set sampling method (step 1) + +For some loss functions, sampling strategies are needed to avoid imbalance between positive and negative samples. + +For example, when using `CrossEntropyLoss` in RPN head, we need to set `RandomSampler` in `train_cfg` + +```python +train_cfg=dict( + rpn=dict( + sampler=dict( + type='RandomSampler', + num=256, + pos_fraction=0.5, + neg_pos_ub=-1, + add_gt_as_proposals=False)) +``` + +For some other losses which have positive and negative sample balance mechanism such as Focal Loss, GHMC, and QualityFocalLoss, the sampler is no more necessary. + +## Tweaking loss + +Tweaking a loss is more related with step 2, 4, 5, and most modifications can be specified in the config. +Here we take [Focal Loss (FL)](../../../mmdet/models/losses/focal_loss.py) as an example. +The following code sniper are the construction method and config of FL respectively, they are actually one to one correspondence. + +```python +@LOSSES.register_module() +class FocalLoss(nn.Module): + + def __init__(self, + use_sigmoid=True, + gamma=2.0, + alpha=0.25, + reduction='mean', + loss_weight=1.0): +``` + +```python +loss_cls=dict( + type='FocalLoss', + use_sigmoid=True, + gamma=2.0, + alpha=0.25, + loss_weight=1.0) +``` + +### Tweaking hyper-parameters (step 2) + +`gamma` and `beta` are two hyper-parameters in the Focal Loss. Say if we want to change the value of `gamma` to be 1.5 and `alpha` to be 0.5, then we can specify them in the config as follows: + +```python +loss_cls=dict( + type='FocalLoss', + use_sigmoid=True, + gamma=1.5, + alpha=0.5, + loss_weight=1.0) +``` + +### Tweaking the way of reduction (step 3) + +The default way of reduction is `mean` for FL. Say if we want to change the reduction from `mean` to `sum`, we can specify it in the config as follows: + +```python +loss_cls=dict( + type='FocalLoss', + use_sigmoid=True, + gamma=2.0, + alpha=0.25, + loss_weight=1.0, + reduction='sum') +``` + +### Tweaking loss weight (step 5) + +The loss weight here is a scalar which controls the weight of different losses in multi-task learning, e.g. classification loss and regression loss. Say if we want to change to loss weight of classification loss to be 0.5, we can specify it in the config as follows: + +```python +loss_cls=dict( + type='FocalLoss', + use_sigmoid=True, + gamma=2.0, + alpha=0.25, + loss_weight=0.5) +``` + +## Weighting loss (step 3) + +Weighting loss means we re-weight the loss element-wisely. To be more specific, we multiply the loss tensor with a weight tensor which has the same shape. As a result, different entries of the loss can be scaled differently, and so called element-wisely. +The loss weight varies across different models and highly context related, but overall there are two kinds of loss weights, `label_weights` for classification loss and `bbox_weights` for bbox regression loss. You can find them in the `get_target` method of the corresponding head. Here we take [ATSSHead](../../../mmdet/models/dense_heads/atss_head.py#L322) as an example, which inherit [AnchorHead](../../../mmdet/models/dense_heads/anchor_head.py) but overwrite its `get_targets` method which yields different `label_weights` and `bbox_weights`. + +``` +class ATSSHead(AnchorHead): + + ... + + def get_targets(self, + anchor_list, + valid_flag_list, + gt_bboxes_list, + img_metas, + gt_bboxes_ignore_list=None, + gt_labels_list=None, + label_channels=1, + unmap_outputs=True): +``` diff --git a/grounding-dino/mmdetection/docs/en/advanced_guides/customize_models.md b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_models.md new file mode 100644 index 0000000000000000000000000000000000000000..1779aeb1aa1f347fa27cd71bf214dc0b298f6b43 --- /dev/null +++ b/grounding-dino/mmdetection/docs/en/advanced_guides/customize_models.md @@ -0,0 +1,412 @@ +# Customize Models + +We basically categorize model components into 5 types. + +- backbone: usually an FCN network to extract feature maps, e.g., ResNet, MobileNet. +- neck: the component between backbones and heads, e.g., FPN, PAFPN. +- head: the component for specific tasks, e.g., bbox prediction and mask prediction. +- roi extractor: the part for extracting RoI features from feature maps, e.g., RoI Align. +- loss: the component in head for calculating losses, e.g., FocalLoss, L1Loss, and GHMLoss. + +## Develop new components + +### Add a new backbone + +Here we show how to develop new components with an example of MobileNet. + +#### 1. Define a new backbone (e.g. MobileNet) + +Create a new file `mmdet/models/backbones/mobilenet.py`. + +```python +import torch.nn as nn + +from mmdet.registry import MODELS + + +@MODELS.register_module() +class MobileNet(nn.Module): + + def __init__(self, arg1, arg2): + pass + + def forward(self, x): # should return a tuple + pass +``` + +#### 2. Import the module + +You can either add the following line to `mmdet/models/backbones/__init__.py` + +```python +from .mobilenet import MobileNet +``` + +or alternatively add + +```python +custom_imports = dict( + imports=['mmdet.models.backbones.mobilenet'], + allow_failed_imports=False) +``` + +to the config file to avoid modifying the original code. + +#### 3. Use the backbone in your config file + +```python +model = dict( + ... + backbone=dict( + type='MobileNet', + arg1=xxx, + arg2=xxx), + ... +``` + +### Add new necks + +#### 1. Define a neck (e.g. PAFPN) + +Create a new file `mmdet/models/necks/pafpn.py`. + +```python +import torch.nn as nn + +from mmdet.registry import MODELS + +@MODELS.register_module() +class PAFPN(nn.Module): + + def __init__(self, + in_channels, + out_channels, + num_outs, + start_level=0, + end_level=-1, + add_extra_convs=False): + pass + + def forward(self, inputs): + # implementation is ignored + pass +``` + +#### 2. Import the module + +You can either add the following line to `mmdet/models/necks/__init__.py`, + +```python +from .pafpn import PAFPN +``` + +or alternatively add + +```python +custom_imports = dict( + imports=['mmdet.models.necks.pafpn'], + allow_failed_imports=False) +``` + +to the config file and avoid modifying the original code. + +#### 3. Modify the config file + +```python +neck=dict( + type='PAFPN', + in_channels=[256, 512, 1024, 2048], + out_channels=256, + num_outs=5) +``` + +### Add new heads + +Here we show how to develop a new head with the example of [Double Head R-CNN](https://arxiv.org/abs/1904.06493) as the following. + +First, add a new bbox head in `mmdet/models/roi_heads/bbox_heads/double_bbox_head.py`. +Double Head R-CNN implements a new bbox head for object detection. +To implement a bbox head, basically we need to implement three functions of the new module as the following. + +```python +from typing import Tuple + +import torch.nn as nn +from mmcv.cnn import ConvModule +from mmengine.model import BaseModule, ModuleList +from torch import Tensor + +from mmdet.models.backbones.resnet import Bottleneck +from mmdet.registry import MODELS +from mmdet.utils import ConfigType, MultiConfig, OptConfigType, OptMultiConfig +from .bbox_head import BBoxHead + +@MODELS.register_module() +class DoubleConvFCBBoxHead(BBoxHead): + r"""Bbox head used in Double-Head R-CNN + + .. code-block:: none + + /-> cls + /-> shared convs -> + \-> reg + roi features + /-> cls + \-> shared fc -> + \-> reg + """ # noqa: W605 + + def __init__(self, + num_convs: int = 0, + num_fcs: int = 0, + conv_out_channels: int = 1024, + fc_out_channels: int = 1024, + conv_cfg: OptConfigType = None, + norm_cfg: ConfigType = dict(type='BN'), + init_cfg: MultiConfig = dict( + type='Normal', + override=[ + dict(type='Normal', name='fc_cls', std=0.01), + dict(type='Normal', name='fc_reg', std=0.001), + dict( + type='Xavier', + name='fc_branch', + distribution='uniform') + ]), + **kwargs) -> None: + kwargs.setdefault('with_avg_pool', True) + super().__init__(init_cfg=init_cfg, **kwargs) + + def forward(self, x_cls: Tensor, x_reg: Tensor) -> Tuple[Tensor]: + +``` + +Second, implement a new RoI Head if it is necessary. We plan to inherit the new `DoubleHeadRoIHead` from `StandardRoIHead`. We can find that a `StandardRoIHead` already implements the following functions. + +```python +from typing import List, Optional, Tuple + +import torch +from torch import Tensor + +from mmdet.registry import MODELS, TASK_UTILS +from mmdet.structures import DetDataSample +from mmdet.structures.bbox import bbox2roi +from mmdet.utils import ConfigType, InstanceList +from ..task_modules.samplers import SamplingResult +from ..utils import empty_instances, unpack_gt_instances +from .base_roi_head import BaseRoIHead + + +@MODELS.register_module() +class StandardRoIHead(BaseRoIHead): + """Simplest base roi head including one bbox head and one mask head.""" + + def init_assigner_sampler(self) -> None: + + def init_bbox_head(self, bbox_roi_extractor: ConfigType, + bbox_head: ConfigType) -> None: + + def init_mask_head(self, mask_roi_extractor: ConfigType, + mask_head: ConfigType) -> None: + + def forward(self, x: Tuple[Tensor], + rpn_results_list: InstanceList) -> tuple: + + def loss(self, x: Tuple[Tensor], rpn_results_list: InstanceList, + batch_data_samples: List[DetDataSample]) -> dict: + + def _bbox_forward(self, x: Tuple[Tensor], rois: Tensor) -> dict: + + def bbox_loss(self, x: Tuple[Tensor], + sampling_results: List[SamplingResult]) -> dict: + + def mask_loss(self, x: Tuple[Tensor], + sampling_results: List[SamplingResult], bbox_feats: Tensor, + batch_gt_instances: InstanceList) -> dict: + + def _mask_forward(self, + x: Tuple[Tensor], + rois: Tensor = None, + pos_inds: Optional[Tensor] = None, + bbox_feats: Optional[Tensor] = None) -> dict: + + def predict_bbox(self, + x: Tuple[Tensor], + batch_img_metas: List[dict], + rpn_results_list: InstanceList, + rcnn_test_cfg: ConfigType, + rescale: bool = False) -> InstanceList: + + def predict_mask(self, + x: Tuple[Tensor], + batch_img_metas: List[dict], + results_list: InstanceList, + rescale: bool = False) -> InstanceList: + +``` + +Double Head's modification is mainly in the `bbox_forward` logic, and it inherits other logics from the `StandardRoIHead`. In the `mmdet/models/roi_heads/double_roi_head.py`, we implement the new RoI Head as the following: + +```python +from typing import Tuple + +from torch import Tensor + +from mmdet.registry import MODELS +from .standard_roi_head import StandardRoIHead + + +@MODELS.register_module() +class DoubleHeadRoIHead(StandardRoIHead): + """RoI head for `Double Head RCNN
| 2.x Config | ++ +```python +# Image normalization parameters +img_norm_cfg = dict( + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + to_rgb=True) +pipeline=[ + ..., + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), # Padding the image to multiples of 32 + ... +] +``` + + | +
| 3.x Config | ++ +```python +model = dict( + data_preprocessor=dict( + type='DetDataPreprocessor', + # Image normalization parameters + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True, + # Image padding parameters + pad_mask=True, # In instance segmentation, the mask needs to be padded + pad_size_divisor=32) # Padding the image to multiples of 32 +) + +``` + + | +
| 2.x Config | ++ +```python +data = dict( + samples_per_gpu=2, + workers_per_gpu=2, + train=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_train2017.json', + img_prefix=data_root + 'train2017/', + pipeline=train_pipeline), + val=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_val2017.json', + img_prefix=data_root + 'val2017/', + pipeline=test_pipeline), + test=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_val2017.json', + img_prefix=data_root + 'val2017/', + pipeline=test_pipeline)) +``` + + | +
| 3.x Config | ++ +```python +train_dataloader = dict( + batch_size=2, + num_workers=2, + persistent_workers=True, # Avoid recreating subprocesses after each iteration + sampler=dict(type='DefaultSampler', shuffle=True), # Default sampler, supports both distributed and non-distributed training + batch_sampler=dict(type='AspectRatioBatchSampler'), # Default batch_sampler, used to ensure that images in the batch have similar aspect ratios, so as to better utilize graphics memory + dataset=dict( + type=dataset_type, + data_root=data_root, + ann_file='annotations/instances_train2017.json', + data_prefix=dict(img='train2017/'), + filter_cfg=dict(filter_empty_gt=True, min_size=32), + pipeline=train_pipeline)) +# In version 3.x, validation and test dataloaders can be configured independently +val_dataloader = dict( + batch_size=1, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + ann_file='annotations/instances_val2017.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=test_pipeline)) +test_dataloader = val_dataloader # The configuration of the testing dataloader is the same as that of the validation dataloader, which is omitted here + +``` + + | +
| 2.x Config | ++ +```python +img_norm_cfg = dict( + mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True) +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='Resize', img_scale=(1333, 800), keep_ratio=True), + dict(type='RandomFlip', flip_ratio=0.5), + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), + dict(type='DefaultFormatBundle'), + dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']), +] +``` + + | +
| 3.x Config | ++ +```python +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='Resize', scale=(1333, 800), keep_ratio=True), + dict(type='RandomFlip', prob=0.5), + dict(type='PackDetInputs') +] +``` + + | +
| 2.x Config | ++ +```python +test_pipeline = [ + dict(type='LoadImageFromFile'), + dict( + type='MultiScaleFlipAug', + img_scale=(1333, 800), + flip=False, + transforms=[ + dict(type='Resize', keep_ratio=True), + dict(type='RandomFlip'), + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), + dict(type='ImageToTensor', keys=['img']), + dict(type='Collect', keys=['img']), + ]) +] +``` + + | +
| 3.x Config | ++ +```python +test_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='Resize', scale=(1333, 800), keep_ratio=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor')) +] +``` + + | +
| Name | +2.x Config | +3.x Config | +
|---|---|---|
| Resize | ++ +```python +dict(type='Resize', + img_scale=(1333, 800), + keep_ratio=True) +``` + + | + ++ +```python +dict(type='Resize', + scale=(1333, 800), + keep_ratio=True) +``` + + | +
| RandomResize | ++ +```python +dict( + type='Resize', + img_scale=[ + (1333, 640), (1333, 800)], + multiscale_mode='range', + keep_ratio=True) +``` + + | ++ +```python +dict( + type='RandomResize', + scale=[ + (1333, 640), (1333, 800)], + keep_ratio=True) +``` + + | +
| RandomChoiceResize | ++ +```python +dict( + type='Resize', + img_scale=[ + (1333, 640), (1333, 672), + (1333, 704), (1333, 736), + (1333, 768), (1333, 800)], + multiscale_mode='value', + keep_ratio=True) +``` + + | ++ +```python +dict( + type='RandomChoiceResize', + scales=[ + (1333, 640), (1333, 672), + (1333, 704), (1333, 736), + (1333, 768), (1333, 800)], + keep_ratio=True) +``` + + | +
| RandomFlip | ++ +```python +dict(type='RandomFlip', flip_ratio=0.5) +``` + + | ++ +```python +dict(type='RandomFlip', prob=0.5) +``` + + | +
| Metric Name | +2.x Config | +3.x Config | +
|---|---|---|
| COCO | ++ +```python +data = dict( + val=dict( + type='CocoDataset', + ann_file=data_root + 'annotations/instances_val2017.json')) +evaluation = dict(metric=['bbox', 'segm']) +``` + + | + ++ +```python +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/instances_val2017.json', + metric=['bbox', 'segm'], + format_only=False) +``` + + | +
| Pascal VOC | ++ +```python +data = dict( + val=dict( + type=dataset_type, + ann_file=data_root + 'VOC2007/ImageSets/Main/test.txt')) +evaluation = dict(metric='mAP') +``` + + | ++ +```python +val_evaluator = dict( + type='VOCMetric', + metric='mAP', + eval_mode='11points') +``` + + | +
| OpenImages | ++ +```python +data = dict( + val=dict( + type='OpenImagesDataset', + ann_file=data_root + 'annotations/validation-annotations-bbox.csv', + img_prefix=data_root + 'OpenImages/validation/', + label_file=data_root + 'annotations/class-descriptions-boxable.csv', + hierarchy_file=data_root + + 'annotations/bbox_labels_600_hierarchy.json', + meta_file=data_root + 'annotations/validation-image-metas.pkl', + image_level_ann_file=data_root + + 'annotations/validation-annotations-human-imagelabels-boxable.csv')) +evaluation = dict(interval=1, metric='mAP') +``` + + | ++ +```python +val_evaluator = dict( + type='OpenImagesMetric', + iou_thrs=0.5, + ioa_thrs=0.5, + use_group_of=True, + get_supercategory=True) +``` + + | +
| CityScapes | ++ +```python +data = dict( + val=dict( + type='CityScapesDataset', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + img_prefix=data_root + 'leftImg8bit/val/', + pipeline=test_pipeline)) +evaluation = dict(metric=['bbox', 'segm']) +``` + + | ++ +```python +val_evaluator = [ + dict( + type='CocoMetric', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + metric=['bbox', 'segm']), + dict( + type='CityScapesMetric', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + seg_prefix=data_root + '/gtFine/val', + outfile_prefix='./work_dirs/cityscapes_metric/instance') +] +``` + + | +
| 2.x Config | ++ +```python +runner = dict( + type='EpochBasedRunner', # Type of training loop + max_epochs=12) # Maximum number of training epochs +evaluation = dict(interval=2) # Interval for evaluation, check the performance every 2 epochs +``` + + | +
| 3.x Config | ++ +```python +train_cfg = dict( + type='EpochBasedTrainLoop', # Type of training loop, please refer to https://github.com/open-mmlab/mmengine/blob/main/mmengine/runner/loops.py + max_epochs=12, # Maximum number of training epochs + val_interval=2) # Interval for validation, check the performance every 2 epochs +val_cfg = dict(type='ValLoop') # Type of validation loop +test_cfg = dict(type='TestLoop') # Type of testing loop +``` + + | +
| 2.x Config | ++ +```python +optimizer = dict( + type='SGD', # Optimizer: Stochastic Gradient Descent + lr=0.02, # Base learning rate + momentum=0.9, # SGD with momentum + weight_decay=0.0001) # Weight decay +optimizer_config = dict(grad_clip=None) # Configuration for gradient clipping, set to None to disable +``` + + | +
| 3.x Config | ++ +```python +optim_wrapper = dict( # Configuration for the optimizer wrapper + type='OptimWrapper', # Type of optimizer wrapper, you can switch to AmpOptimWrapper to enable mixed precision training + optimizer=dict( # Optimizer configuration, supports various PyTorch optimizers, please refer to https://pytorch.org/docs/stable/optim.html#algorithms + type='SGD', # SGD + lr=0.02, # Base learning rate + momentum=0.9, # SGD with momentum + weight_decay=0.0001), # Weight decay + clip_grad=None, # Configuration for gradient clipping, set to None to disable. For usage, please see https://mmengine.readthedocs.io/en/latest/tutorials/optimizer.html + ) +``` + + | +
| 2.x Config | ++ +```python +lr_config = dict( + policy='step', # Use multi-step learning rate strategy during training + warmup='linear', # Use linear learning rate warmup + warmup_iters=500, # End warmup at iteration 500 + warmup_ratio=0.001, # Coefficient for learning rate warmup + step=[8, 11], # Learning rate decay at which epochs + gamma=0.1) # Learning rate decay coefficient + +``` + + | +
| 3.x Config | ++ +```python +param_scheduler = [ + dict( + type='LinearLR', # Use linear learning rate warmup + start_factor=0.001, # Coefficient for learning rate warmup + by_epoch=False, # Update the learning rate during warmup at each iteration + begin=0, # Starting from the first iteration + end=500), # End at the 500th iteration + dict( + type='MultiStepLR', # Use multi-step learning rate strategy during training + by_epoch=True, # Update the learning rate at each epoch + begin=0, # Starting from the first epoch + end=12, # Ending at the 12th epoch + milestones=[8, 11], # Learning rate decay at which epochs + gamma=0.1) # Learning rate decay coefficient +] + +``` + + | +
| Function | +2.x Config | +3.x Config | +
|---|---|---|
| Set Save Interval | ++ +```python +checkpoint_config = dict( + interval=1) +``` + + | + ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + interval=1)) +``` + + | +
| Save Best Model | ++ +```python +evaluation = dict( + save_best='auto') +``` + + | ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + save_best='auto')) +``` + + | +
| Keep Latest Model | ++ +```python +checkpoint_config = dict( + max_keep_ckpts=3) +``` + + | ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + max_keep_ckpts=3)) +``` + + | +
| Function | +2.x Config | +3.x Config | +
|---|---|---|
| Set Log Printing Interval | ++ +```python +log_config = dict(interval=50) +``` + + | + ++ +```python +default_hooks = dict( + logger=dict(type='LoggerHook', interval=50)) +# Optional: set moving average window size +log_processor = dict( + type='LogProcessor', window_size=50) +``` + + | +
| Use TensorBoard or WandB to visualize logs | ++ +```python +log_config = dict( + interval=50, + hooks=[ + dict(type='TextLoggerHook'), + dict(type='TensorboardLoggerHook'), + dict(type='MMDetWandbHook', + init_kwargs={ + 'project': 'mmdetection', + 'group': 'maskrcnn-r50-fpn-1x-coco' + }, + interval=50, + log_checkpoint=True, + log_checkpoint_metadata=True, + num_eval_images=100) + ]) +``` + + | ++ +```python +vis_backends = [ + dict(type='LocalVisBackend'), + dict(type='TensorboardVisBackend'), + dict(type='WandbVisBackend', + init_kwargs={ + 'project': 'mmdetection', + 'group': 'maskrcnn-r50-fpn-1x-coco' + }) +] +visualizer = dict( + type='DetLocalVisualizer', + vis_backends=vis_backends, + name='visualizer') +``` + + | +
| 2.x Config | +3.x Config | +
|---|---|
| + +```python +cudnn_benchmark = False +opencv_num_threads = 0 +mp_start_method = 'fork' +dist_params = dict(backend='nccl') +log_level = 'INFO' +load_from = None +resume_from = None + + +``` + + | ++ +```python +env_cfg = dict( + cudnn_benchmark=False, + mp_cfg=dict(mp_start_method='fork', + opencv_num_threads=0), + dist_cfg=dict(backend='nccl')) +log_level = 'INFO' +load_from = None +resume = False +``` + + | +
| before v2.25.0 | +after v2.25.0 | +
| + + - `mask2former_xxx_coco.py` represents config files for **panoptic segmentation**. + + | ++ + - `mask2former_xxx_coco.py` represents config files for **instance segmentation**. + - `mask2former_xxx_coco-panoptic.py` represents config files for **panoptic segmentation**. + + |
|---|
| v2.23.0 | +v2.24.0 | +
| + + ```python + data = dict( + samples_per_gpu=64, workers_per_gpu=4, + train=dict(type='xxx', ...), + val=dict(type='xxx', samples_per_gpu=4, ...), + test=dict(type='xxx', ...), + ) + ``` + + | ++ + ```python + # A recommended config that is clear + data = dict( + train=dict(type='xxx', ...), + val=dict(type='xxx', ...), + test=dict(type='xxx', ...), + # Use different batch size during inference. + train_dataloader=dict(samples_per_gpu=64, workers_per_gpu=4), + val_dataloader=dict(samples_per_gpu=8, workers_per_gpu=2), + test_dataloader=dict(samples_per_gpu=8, workers_per_gpu=2), + ) + + # Old style still works but allows to set more arguments about data loaders + data = dict( + samples_per_gpu=64, # only works for train_dataloader + workers_per_gpu=4, # only works for train_dataloader + train=dict(type='xxx', ...), + val=dict(type='xxx', ...), + test=dict(type='xxx', ...), + # Use different batch size during inference. + val_dataloader=dict(samples_per_gpu=8, workers_per_gpu=2), + test_dataloader=dict(samples_per_gpu=8, workers_per_gpu=2), + ) + ``` + + |
|---|
| before v2.25.0 | +after v2.25.0 | +
| + +``` +'mask2former_xxx_coco.py' represents config files for **panoptic segmentation**. +``` + + | ++ +``` +'mask2former_xxx_coco.py' represents config files for **instance segmentation**. +'mask2former_xxx_coco-panoptic.py' represents config files for **panoptic segmentation**. +``` + + |
|---|
 +
+ +
+ +
+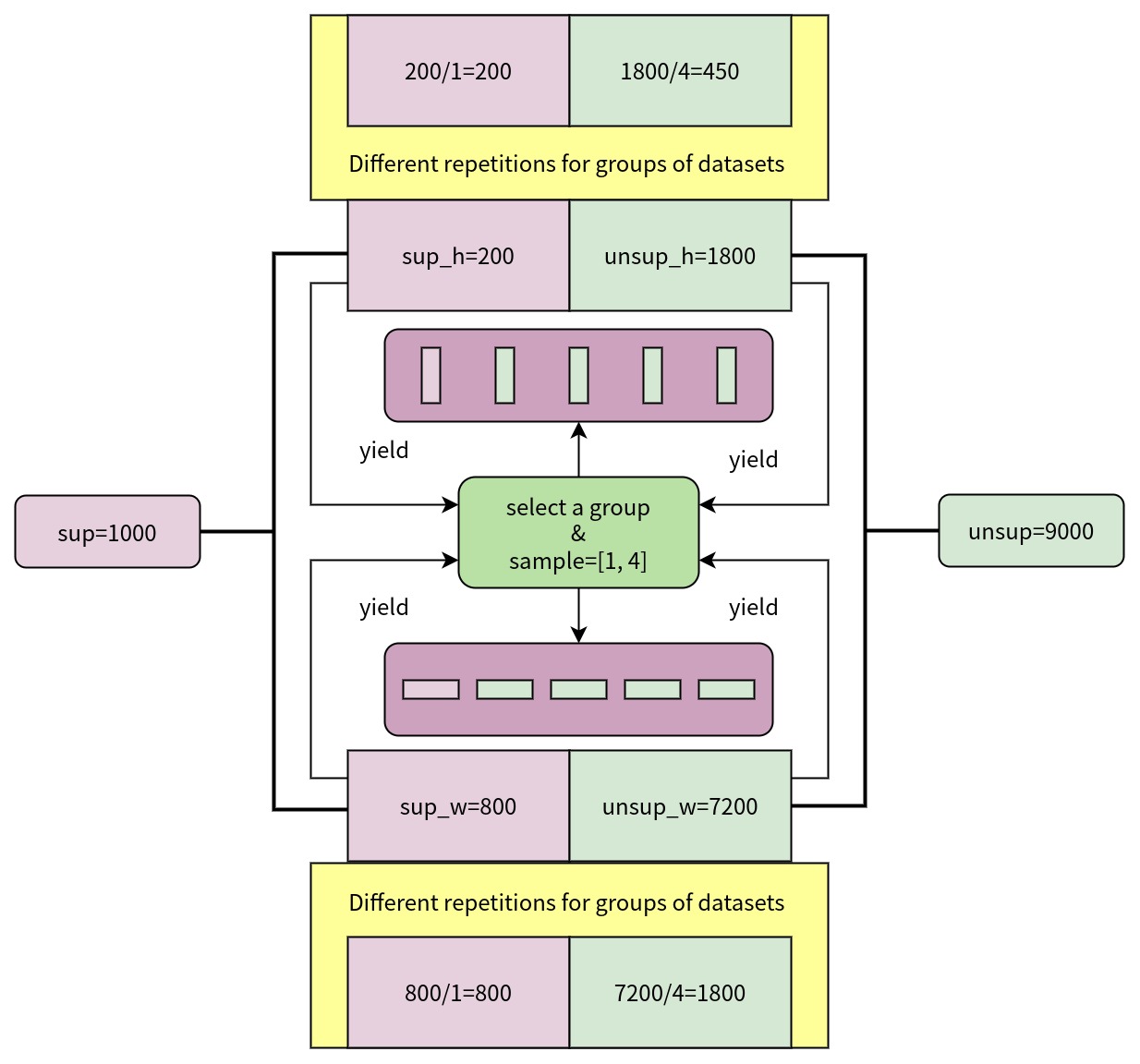 +
+ +
+
+
+| 原配置 | ++ +```python +# 图像归一化参数 +img_norm_cfg = dict( + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + to_rgb=True) +pipeline=[ + ..., + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), # 图像 padding 到 32 的倍数 + ... +] +``` + + | +
| 新配置 | ++ +```python +model = dict( + data_preprocessor=dict( + type='DetDataPreprocessor', + # 图像归一化参数 + mean=[123.675, 116.28, 103.53], + std=[58.395, 57.12, 57.375], + bgr_to_rgb=True, + # 图像 padding 参数 + pad_mask=True, # 在实例分割中,需要将 mask 也进行 padding + pad_size_divisor=32) # 图像 padding 到 32 的倍数 +) +``` + + | +
| 原配置 | ++ +```python +data = dict( + samples_per_gpu=2, + workers_per_gpu=2, + train=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_train2017.json', + img_prefix=data_root + 'train2017/', + pipeline=train_pipeline), + val=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_val2017.json', + img_prefix=data_root + 'val2017/', + pipeline=test_pipeline), + test=dict( + type=dataset_type, + ann_file=data_root + 'annotations/instances_val2017.json', + img_prefix=data_root + 'val2017/', + pipeline=test_pipeline)) +``` + + | +
| 新配置 | ++ +```python +train_dataloader = dict( + batch_size=2, + num_workers=2, + persistent_workers=True, # 避免每次迭代后 dataloader 重新创建子进程 + sampler=dict(type='DefaultSampler', shuffle=True), # 默认的 sampler,同时支持分布式训练和非分布式训练 + batch_sampler=dict(type='AspectRatioBatchSampler'), # 默认的 batch_sampler,用于保证 batch 中的图片具有相似的长宽比,从而可以更好地利用显存 + dataset=dict( + type=dataset_type, + data_root=data_root, + ann_file='annotations/instances_train2017.json', + data_prefix=dict(img='train2017/'), + filter_cfg=dict(filter_empty_gt=True, min_size=32), + pipeline=train_pipeline)) +# 在 3.x 版本中可以独立配置验证和测试的 dataloader +val_dataloader = dict( + batch_size=1, + num_workers=2, + persistent_workers=True, + drop_last=False, + sampler=dict(type='DefaultSampler', shuffle=False), + dataset=dict( + type=dataset_type, + data_root=data_root, + ann_file='annotations/instances_val2017.json', + data_prefix=dict(img='val2017/'), + test_mode=True, + pipeline=test_pipeline)) +test_dataloader = val_dataloader # 测试 dataloader 的配置与验证 dataloader 的配置相同,这里省略 +``` + + | +
| 原配置 | ++ +```python +img_norm_cfg = dict( + mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True) +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='Resize', img_scale=(1333, 800), keep_ratio=True), + dict(type='RandomFlip', flip_ratio=0.5), + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), + dict(type='DefaultFormatBundle'), + dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']), +] +``` + + | +
| 新配置 | ++ +```python +train_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='LoadAnnotations', with_bbox=True), + dict(type='Resize', scale=(1333, 800), keep_ratio=True), + dict(type='RandomFlip', prob=0.5), + dict(type='PackDetInputs') +] +``` + + | +
| 原配置 | ++ +```python +test_pipeline = [ + dict(type='LoadImageFromFile'), + dict( + type='MultiScaleFlipAug', + img_scale=(1333, 800), + flip=False, + transforms=[ + dict(type='Resize', keep_ratio=True), + dict(type='RandomFlip'), + dict(type='Normalize', **img_norm_cfg), + dict(type='Pad', size_divisor=32), + dict(type='ImageToTensor', keys=['img']), + dict(type='Collect', keys=['img']), + ]) +] +``` + + | +
| 新配置 | ++ +```python +test_pipeline = [ + dict(type='LoadImageFromFile'), + dict(type='Resize', scale=(1333, 800), keep_ratio=True), + dict( + type='PackDetInputs', + meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', + 'scale_factor')) +] +``` + + | +
| 名称 | +原配置 | +新配置 | +
|---|---|---|
| Resize | ++ +```python +dict(type='Resize', + img_scale=(1333, 800), + keep_ratio=True) +``` + + | + ++ +```python +dict(type='Resize', + scale=(1333, 800), + keep_ratio=True) +``` + + | +
| RandomResize | ++ +```python +dict( + type='Resize', + img_scale=[ + (1333, 640), (1333, 800)], + multiscale_mode='range', + keep_ratio=True) +``` + + | ++ +```python +dict( + type='RandomResize', + scale=[ + (1333, 640), (1333, 800)], + keep_ratio=True) +``` + + | +
| RandomChoiceResize | ++ +```python +dict( + type='Resize', + img_scale=[ + (1333, 640), (1333, 672), + (1333, 704), (1333, 736), + (1333, 768), (1333, 800)], + multiscale_mode='value', + keep_ratio=True) +``` + + | ++ +```python +dict( + type='RandomChoiceResize', + scales=[ + (1333, 640), (1333, 672), + (1333, 704), (1333, 736), + (1333, 768), (1333, 800)], + keep_ratio=True) +``` + + | +
| RandomFlip | ++ +```python +dict(type='RandomFlip', + flip_ratio=0.5) +``` + + | ++ +```python +dict(type='RandomFlip', + prob=0.5) +``` + + | +
| 评测指标名称 | +原配置 | +新配置 | +
|---|---|---|
| COCO | ++ +```python +data = dict( + val=dict( + type='CocoDataset', + ann_file=data_root + 'annotations/instances_val2017.json')) +evaluation = dict(metric=['bbox', 'segm']) +``` + + | + ++ +```python +val_evaluator = dict( + type='CocoMetric', + ann_file=data_root + 'annotations/instances_val2017.json', + metric=['bbox', 'segm'], + format_only=False) +``` + + | +
| Pascal VOC | ++ +```python +data = dict( + val=dict( + type=dataset_type, + ann_file=data_root + 'VOC2007/ImageSets/Main/test.txt')) +evaluation = dict(metric='mAP') +``` + + | ++ +```python +val_evaluator = dict( + type='VOCMetric', + metric='mAP', + eval_mode='11points') +``` + + | +
| OpenImages | ++ +```python +data = dict( + val=dict( + type='OpenImagesDataset', + ann_file=data_root + 'annotations/validation-annotations-bbox.csv', + img_prefix=data_root + 'OpenImages/validation/', + label_file=data_root + 'annotations/class-descriptions-boxable.csv', + hierarchy_file=data_root + + 'annotations/bbox_labels_600_hierarchy.json', + meta_file=data_root + 'annotations/validation-image-metas.pkl', + image_level_ann_file=data_root + + 'annotations/validation-annotations-human-imagelabels-boxable.csv')) +evaluation = dict(interval=1, metric='mAP') +``` + + | ++ +```python +val_evaluator = dict( + type='OpenImagesMetric', + iou_thrs=0.5, + ioa_thrs=0.5, + use_group_of=True, + get_supercategory=True) +``` + + | +
| CityScapes | ++ +```python +data = dict( + val=dict( + type='CityScapesDataset', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + img_prefix=data_root + 'leftImg8bit/val/', + pipeline=test_pipeline)) +evaluation = dict(metric=['bbox', 'segm']) +``` + + | ++ +```python +val_evaluator = [ + dict( + type='CocoMetric', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + metric=['bbox', 'segm']), + dict( + type='CityScapesMetric', + ann_file=data_root + + 'annotations/instancesonly_filtered_gtFine_val.json', + seg_prefix=data_root + '/gtFine/val', + outfile_prefix='./work_dirs/cityscapes_metric/instance') +] +``` + + | +
| 原配置 | ++ +```python +runner = dict( + type='EpochBasedRunner', # 训练循环的类型 + max_epochs=12) # 最大训练轮次 +evaluation = dict(interval=2) # 验证间隔。每 2 个 epoch 验证一次 +``` + + | +
| 新配置 | ++ +```python +train_cfg = dict( + type='EpochBasedTrainLoop', # 训练循环的类型,请参考 https://github.com/open-mmlab/mmengine/blob/main/mmengine/runner/loops.py + max_epochs=12, # 最大训练轮次 + val_interval=2) # 验证间隔。每 2 个 epoch 验证一次 +val_cfg = dict(type='ValLoop') # 验证循环的类型 +test_cfg = dict(type='TestLoop') # 测试循环的类型 +``` + + | +
| 原配置 | ++ +```python +optimizer = dict( + type='SGD', # 随机梯度下降优化器 + lr=0.02, # 基础学习率 + momentum=0.9, # 带动量的随机梯度下降 + weight_decay=0.0001) # 权重衰减 +optimizer_config = dict(grad_clip=None) # 梯度裁剪的配置,设置为 None 关闭梯度裁剪 +``` + + | +
| 新配置 | ++ +```python +optim_wrapper = dict( # 优化器封装的配置 + type='OptimWrapper', # 优化器封装的类型。可以切换至 AmpOptimWrapper 来启用混合精度训练 + optimizer=dict( # 优化器配置。支持 PyTorch 的各种优化器。请参考 https://pytorch.org/docs/stable/optim.html#algorithms + type='SGD', # 随机梯度下降优化器 + lr=0.02, # 基础学习率 + momentum=0.9, # 带动量的随机梯度下降 + weight_decay=0.0001), # 权重衰减 + clip_grad=None, # 梯度裁剪的配置,设置为 None 关闭梯度裁剪。使用方法请见 https://mmengine.readthedocs.io/en/latest/tutorials/optimizer.html + ) +``` + + | +
| 原配置 | ++ +```python +lr_config = dict( + policy='step', # 在训练过程中使用 multi step 学习率策略 + warmup='linear', # 使用线性学习率预热 + warmup_iters=500, # 到第 500 个 iteration 结束预热 + warmup_ratio=0.001, # 学习率预热的系数 + step=[8, 11], # 在哪几个 epoch 进行学习率衰减 + gamma=0.1) # 学习率衰减系数 +``` + + | +
| 新配置 | ++ +```python +param_scheduler = [ + dict( + type='LinearLR', # 使用线性学习率预热 + start_factor=0.001, # 学习率预热的系数 + by_epoch=False, # 按 iteration 更新预热学习率 + begin=0, # 从第一个 iteration 开始 + end=500), # 到第 500 个 iteration 结束 + dict( + type='MultiStepLR', # 在训练过程中使用 multi step 学习率策略 + by_epoch=True, # 按 epoch 更新学习率 + begin=0, # 从第一个 epoch 开始 + end=12, # 到第 12 个 epoch 结束 + milestones=[8, 11], # 在哪几个 epoch 进行学习率衰减 + gamma=0.1) # 学习率衰减系数 +] +``` + + | +
| 功能 | +原配置 | +新配置 | +
|---|---|---|
| 设置保存间隔 | ++ +```python +checkpoint_config = dict( + interval=1) +``` + + | + ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + interval=1)) +``` + + | +
| 保存最佳模型 | ++ +```python +evaluation = dict( + save_best='auto') +``` + + | ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + save_best='auto')) +``` + + | +
| 只保留最新的几个模型 | ++ +```python +checkpoint_config = dict( + max_keep_ckpts=3) +``` + + | ++ +```python +default_hooks = dict( + checkpoint=dict( + type='CheckpointHook', + max_keep_ckpts=3)) +``` + + | +
| 功能 | +原配置 | +新配置 | +
|---|---|---|
| 设置日志打印间隔 | ++ +```python +log_config = dict( + interval=50) +``` + + | + ++ +```python +default_hooks = dict( + logger=dict( + type='LoggerHook', + interval=50)) +# 可选: 配置日志打印数值的平滑窗口大小 +log_processor = dict( + type='LogProcessor', + window_size=50) +``` + + | +
| 使用 TensorBoard 或 WandB 可视化日志 | ++ +```python +log_config = dict( + interval=50, + hooks=[ + dict(type='TextLoggerHook'), + dict(type='TensorboardLoggerHook'), + dict(type='MMDetWandbHook', + init_kwargs={ + 'project': 'mmdetection', + 'group': 'maskrcnn-r50-fpn-1x-coco' + }, + interval=50, + log_checkpoint=True, + log_checkpoint_metadata=True, + num_eval_images=100) + ]) +``` + + | ++ +```python +vis_backends = [ + dict(type='LocalVisBackend'), + dict(type='TensorboardVisBackend'), + dict(type='WandbVisBackend', + init_kwargs={ + 'project': 'mmdetection', + 'group': 'maskrcnn-r50-fpn-1x-coco' + }) +] +visualizer = dict( + type='DetLocalVisualizer', vis_backends=vis_backends, name='visualizer') +``` + + | +
| 原配置 | +新配置 | +
|---|---|
| + +```python +cudnn_benchmark = False +opencv_num_threads = 0 +mp_start_method = 'fork' +dist_params = dict(backend='nccl') +log_level = 'INFO' +load_from = None +resume_from = None + + +``` + + | ++ +```python +env_cfg = dict( + cudnn_benchmark=False, + mp_cfg=dict(mp_start_method='fork', + opencv_num_threads=0), + dist_cfg=dict(backend='nccl')) +log_level = 'INFO' +load_from = None +resume = False +``` + + | +
| 在 v2.25.0 之前 | +v2.25.0 及之后 | +
| + +``` +'mask2former_xxx_coco.py' 代表全景分割的配置文件 +``` + + | ++ +``` +'mask2former_xxx_coco.py' 代表实例分割的配置文件 +'mask2former_xxx_coco-panoptic.py' 代表全景分割的配置文件 +``` + + |
|---|
+
+
+
+
+
+ +
+ +
+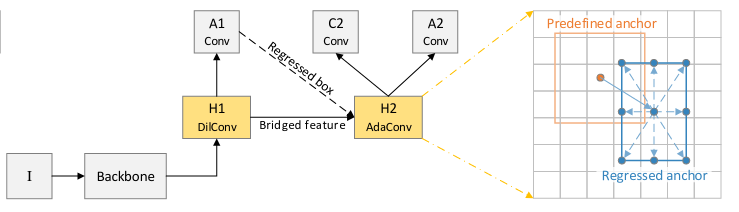 +
+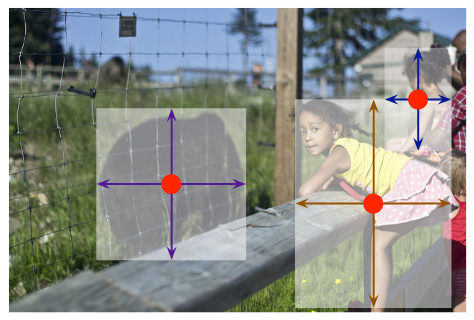 +
+ +
+ +
+ +
+ +
+ +
+ +
+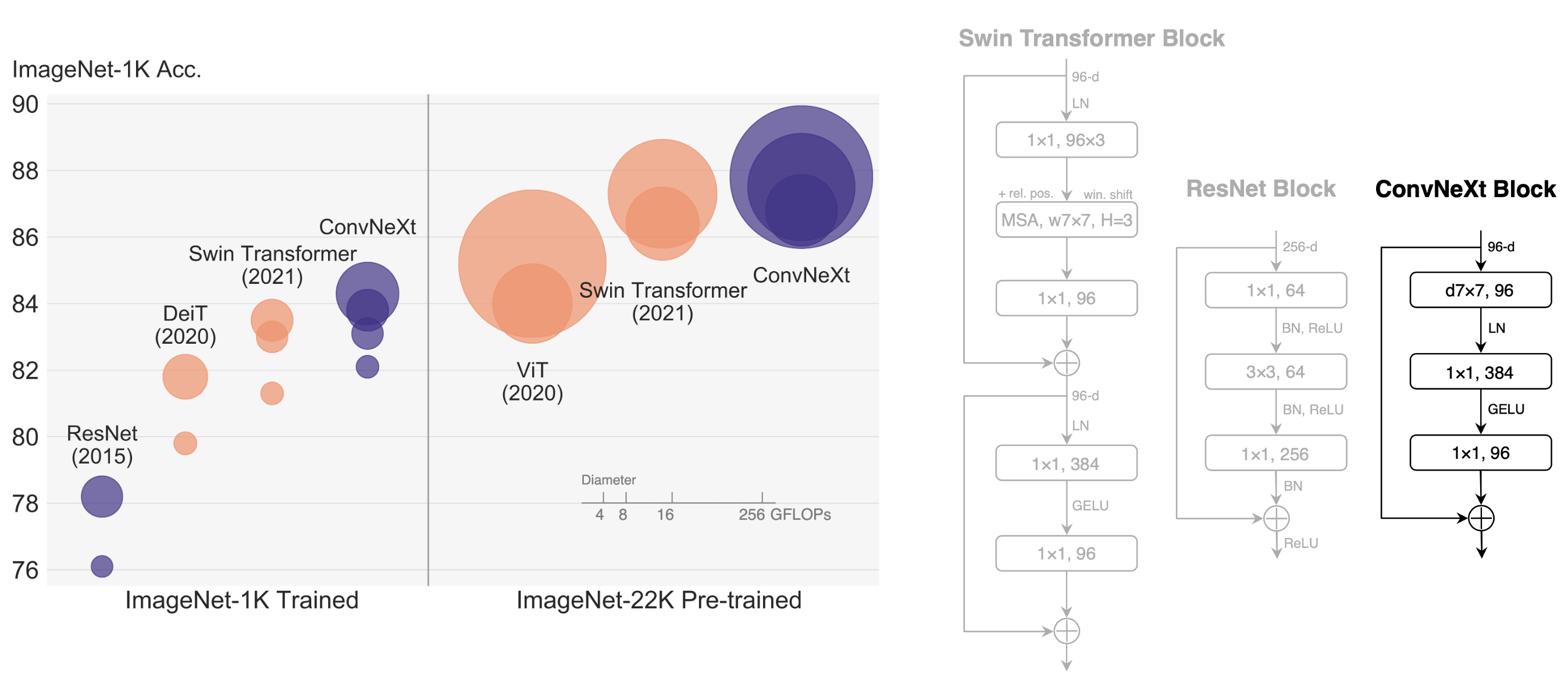 +
+ +
+ +
+ +
+ +
+ +
+ +
+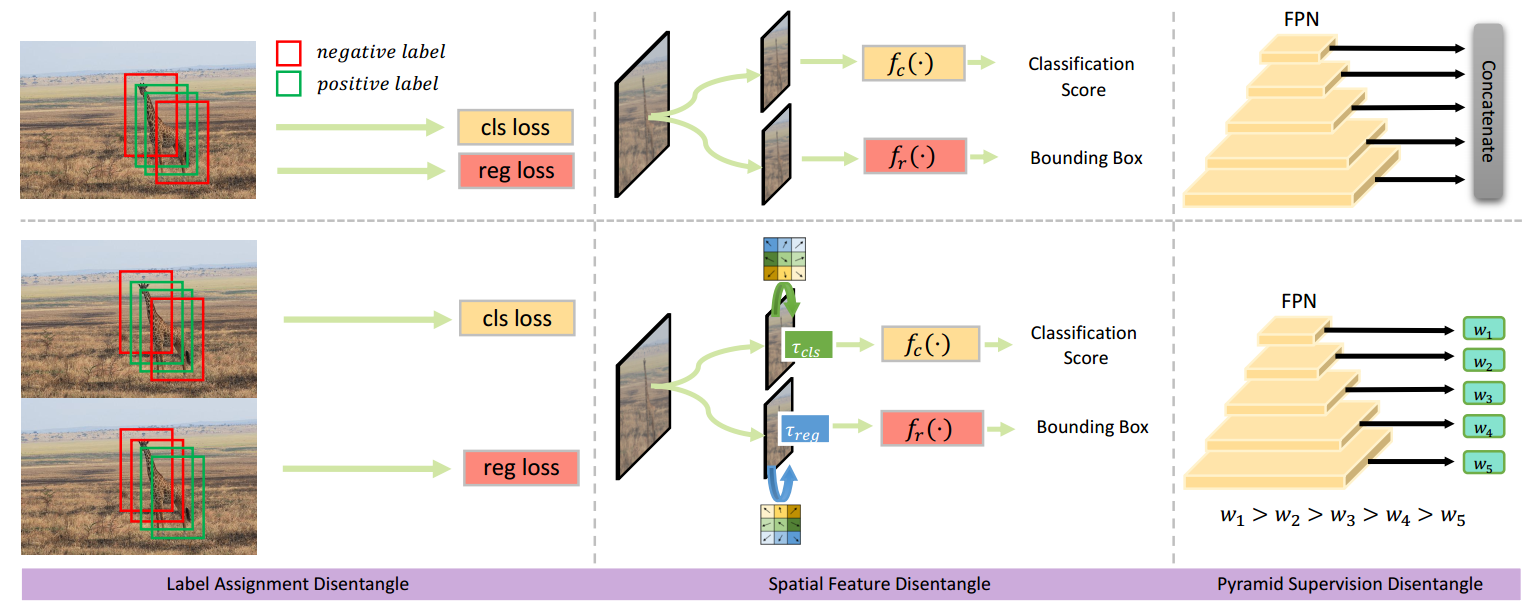 +
+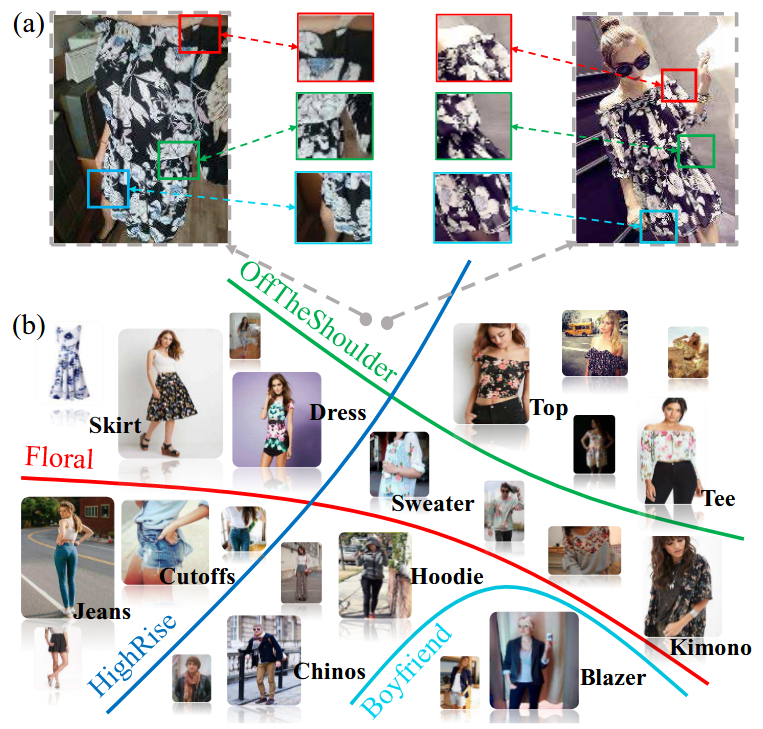 +
+ +
+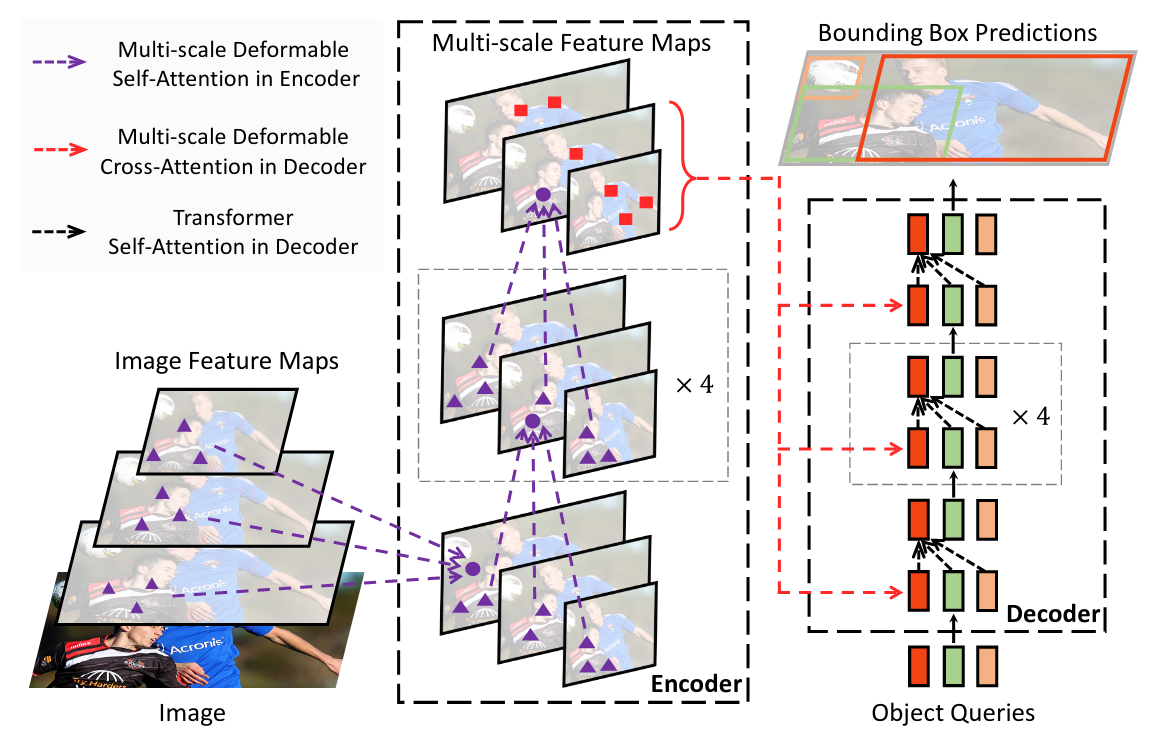 +
+ +
+ +
+ +
+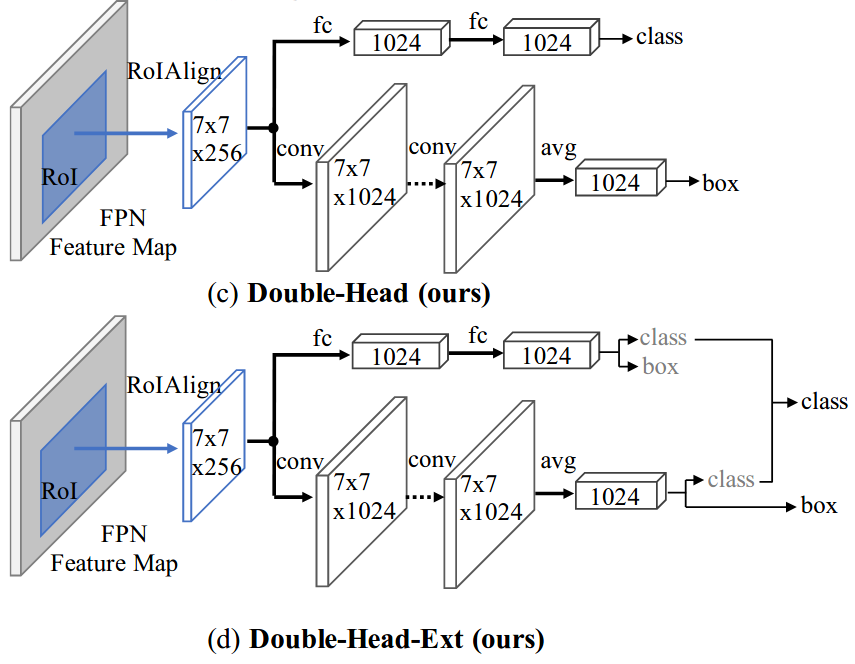 +
+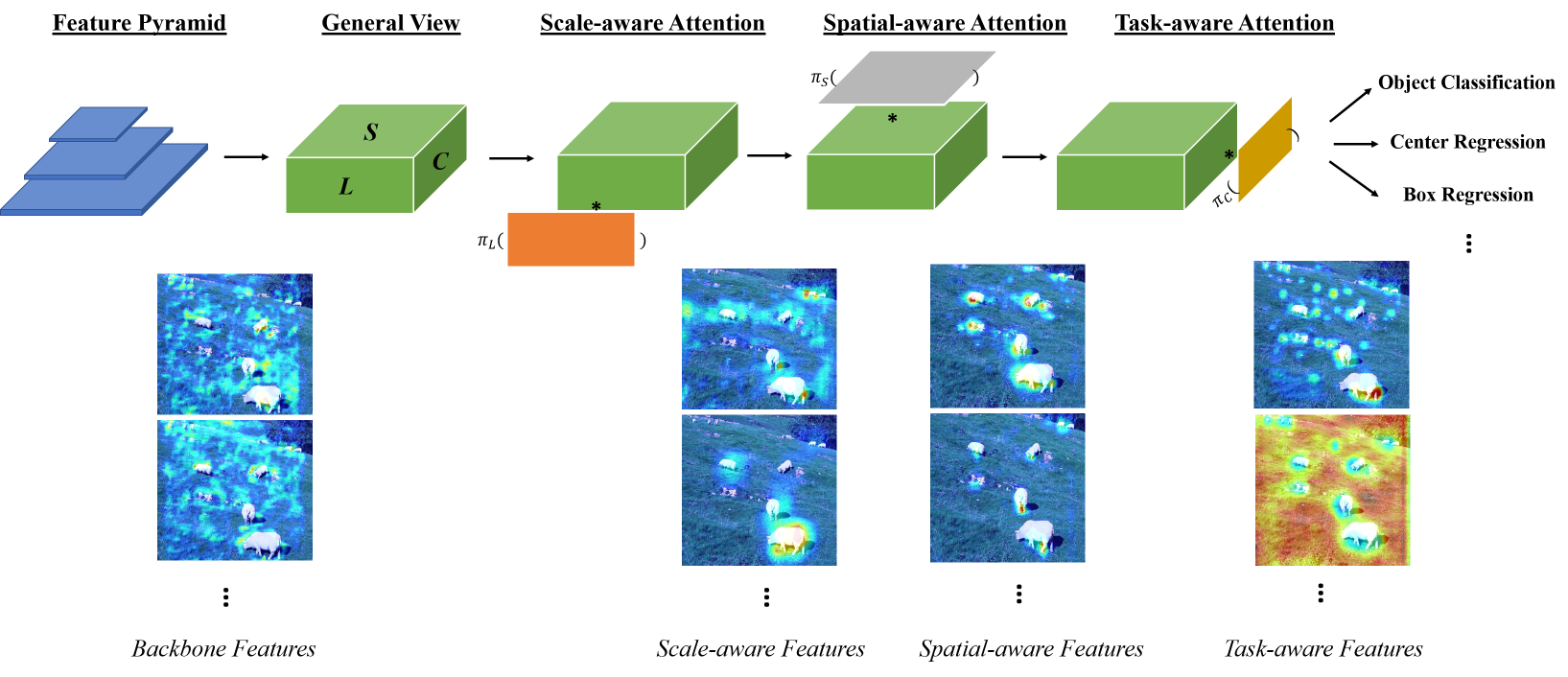 +
+ +
+ +
+ +
+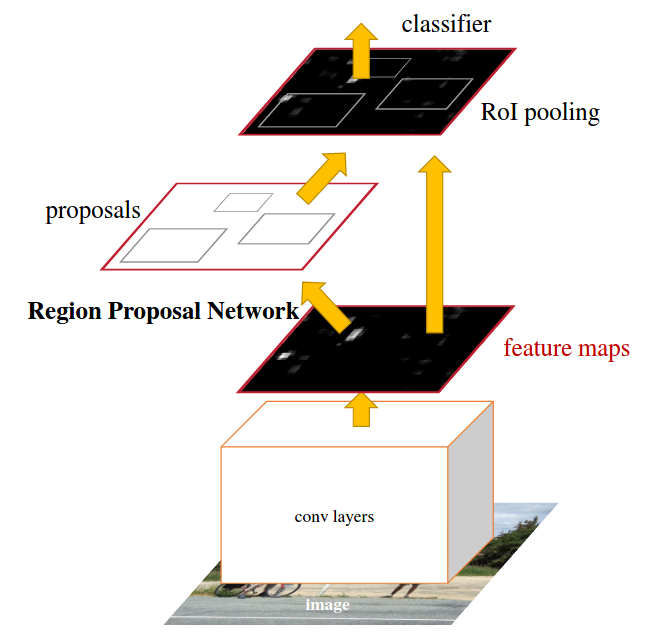 +
+ +
+ +
+ +
+ +
+ +
+ +
+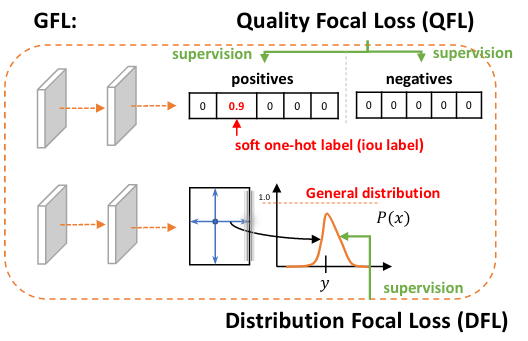 +
+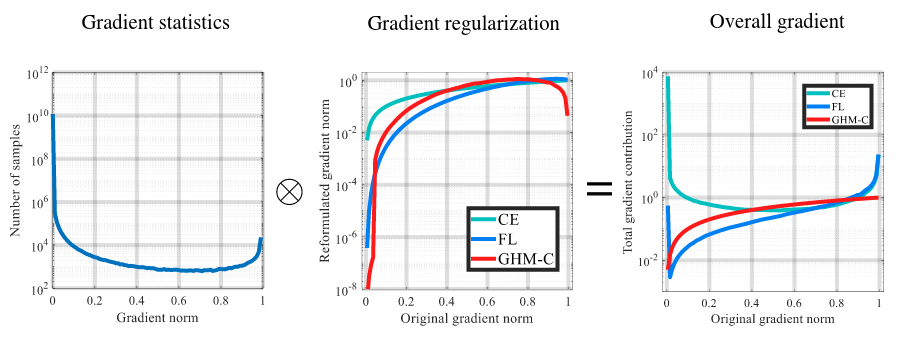 +
+ +
+ +
+ +
+ +
+ +
+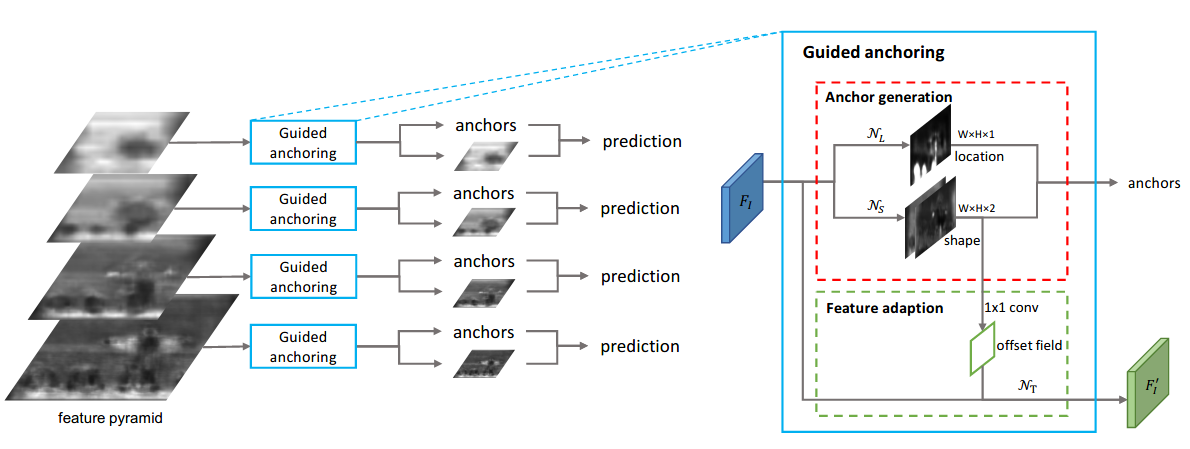 +
+ +
+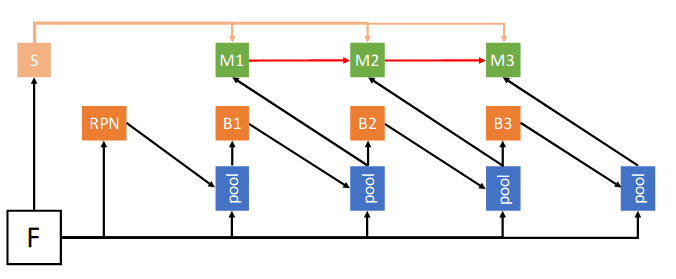 +
+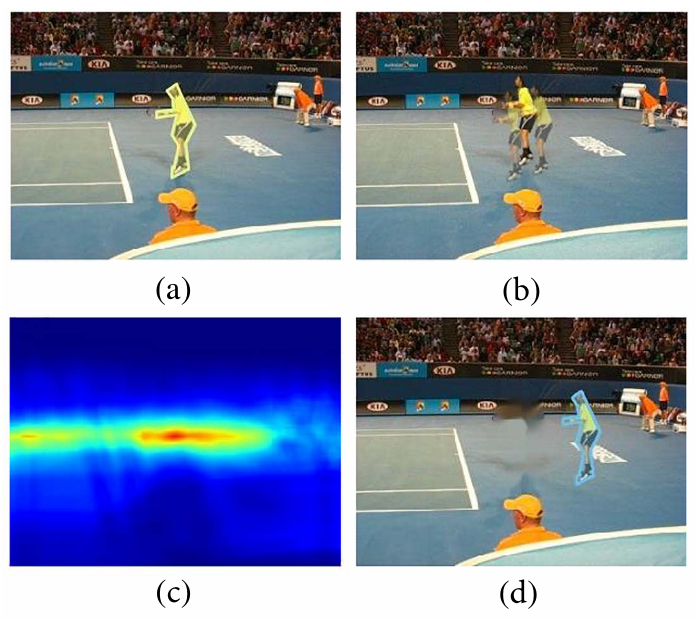 +
+ +
+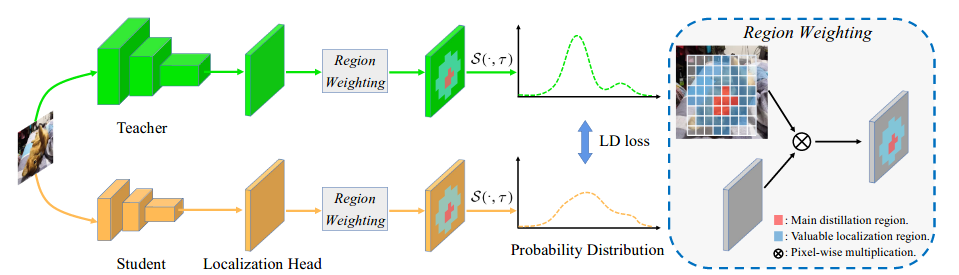 +
+ +
+ +
+ +
+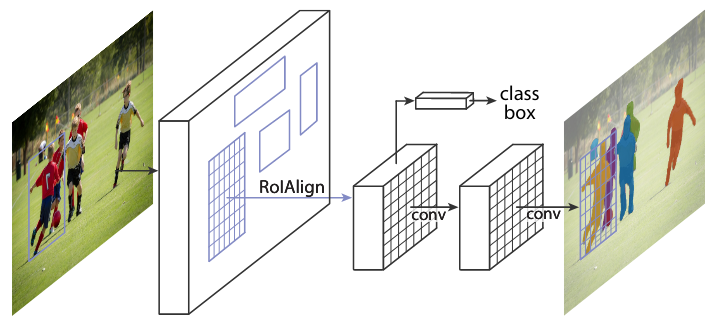 +
+ +
+
+
+
+
+ +
+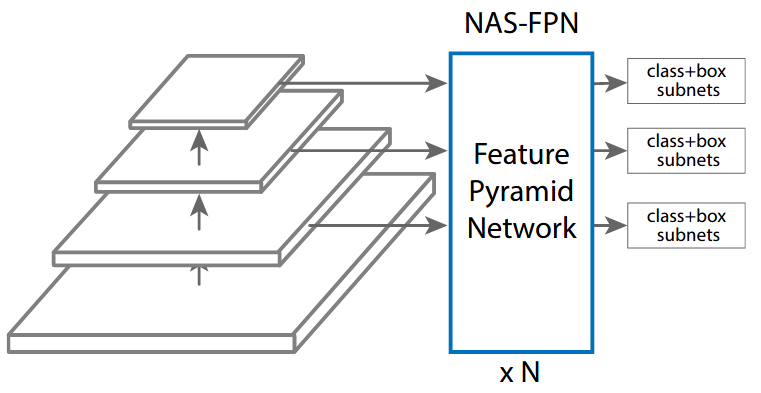 +
+ +
+ +
+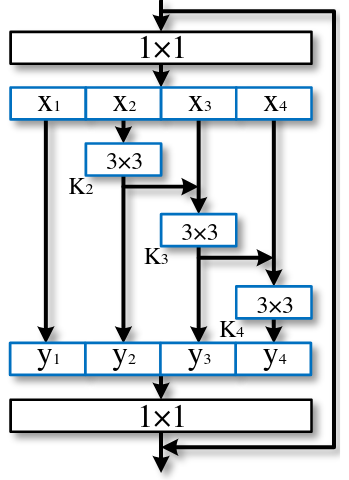 +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+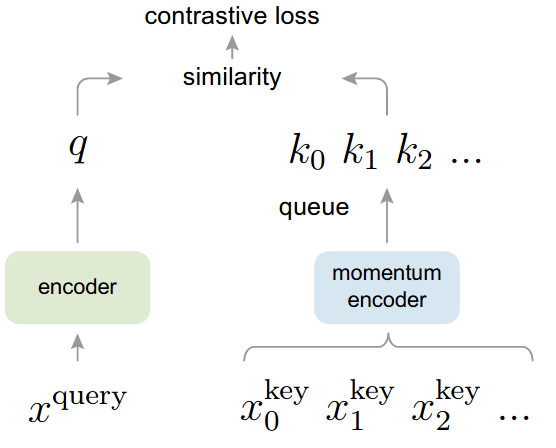 +
+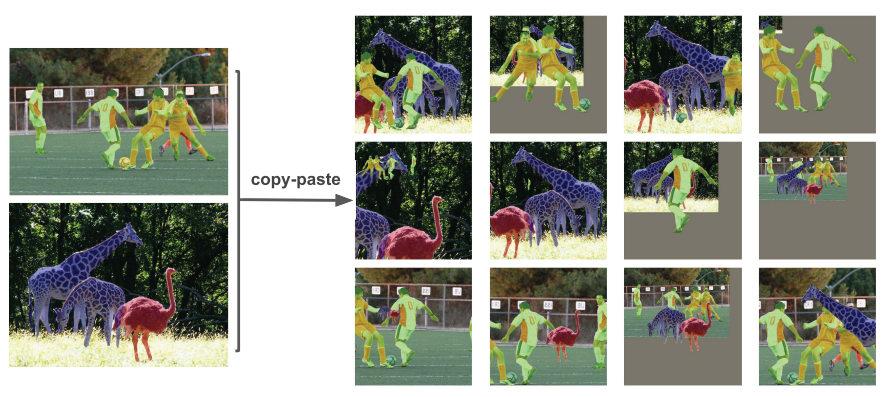 +
+ +
+ +
+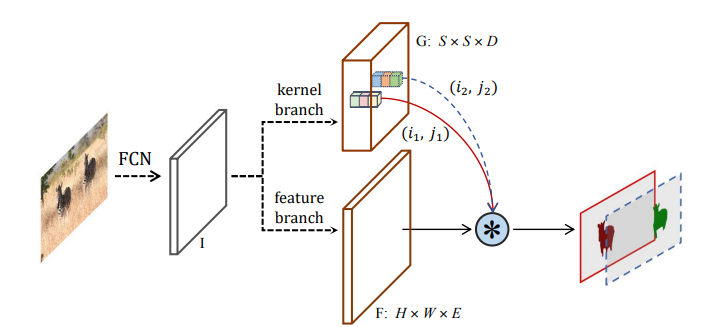 +
+
+
+
+
+