Spaces:
Running

Running

| """ | |
| Title: Low-light image enhancement using MIRNet | |
| Author: [Soumik Rakshit](http://github.com/soumik12345) | |
| Date created: 2021/09/11 | |
| Last modified: 2023/07/15 | |
| Description: Implementing the MIRNet architecture for low-light image enhancement. | |
| Accelerator: GPU | |
| Converted to Keras 3 by: [Soumik Rakshit](http://github.com/soumik12345) | |
| """ | |
| """ | |
| ## Introduction | |
| With the goal of recovering high-quality image content from its degraded version, image | |
| restoration enjoys numerous applications, such as in | |
| photography, security, medical imaging, and remote sensing. In this example, we implement the | |
| **MIRNet** model for low-light image enhancement, a fully-convolutional architecture that | |
| learns an enriched set of | |
| features that combines contextual information from multiple scales, while | |
| simultaneously preserving the high-resolution spatial details. | |
| ### References: | |
| - [Learning Enriched Features for Real Image Restoration and Enhancement](https://arxiv.org/abs/2003.06792) | |
| - [The Retinex Theory of Color Vision](http://www.cnbc.cmu.edu/~tai/cp_papers/E.Land_Retinex_Theory_ScientifcAmerican.pdf) | |
| - [Two deterministic half-quadratic regularization algorithms for computed imaging](https://ieeexplore.ieee.org/document/413553) | |
| """ | |
| """ | |
| ## Downloading LOLDataset | |
| The **LoL Dataset** has been created for low-light image enhancement. | |
| It provides 485 images for training and 15 for testing. Each image pair in the dataset | |
| consists of a low-light input image and its corresponding well-exposed reference image. | |
| """ | |
| import os | |
| os.environ["KERAS_BACKEND"] = "tensorflow" | |
| import random | |
| import numpy as np | |
| from glob import glob | |
| from PIL import Image, ImageOps | |
| import matplotlib.pyplot as plt | |
| import keras | |
| from keras import layers | |
| import tensorflow as tf | |
| """shell | |
| wget https://huggingface.co/datasets/geekyrakshit/LoL-Dataset/resolve/main/lol_dataset.zip | |
| unzip -q lol_dataset.zip && rm lol_dataset.zip | |
| """ | |
| """ | |
| ## Creating a TensorFlow Dataset | |
| We use 300 image pairs from the LoL Dataset's training set for training, | |
| and we use the remaining 185 image pairs for validation. | |
| We generate random crops of size `128 x 128` from the image pairs to be | |
| used for both training and validation. | |
| """ | |
| random.seed(10) | |
| IMAGE_SIZE = 128 | |
| BATCH_SIZE = 4 | |
| MAX_TRAIN_IMAGES = 300 | |
| def read_image(image_path): | |
| image = tf.io.read_file(image_path) | |
| image = tf.image.decode_png(image, channels=3) | |
| image.set_shape([None, None, 3]) | |
| image = tf.cast(image, dtype=tf.float32) / 255.0 | |
| return image | |
| def random_crop(low_image, enhanced_image): | |
| low_image_shape = tf.shape(low_image)[:2] | |
| low_w = tf.random.uniform( | |
| shape=(), maxval=low_image_shape[1] - IMAGE_SIZE + 1, dtype=tf.int32 | |
| ) | |
| low_h = tf.random.uniform( | |
| shape=(), maxval=low_image_shape[0] - IMAGE_SIZE + 1, dtype=tf.int32 | |
| ) | |
| low_image_cropped = low_image[ | |
| low_h : low_h + IMAGE_SIZE, low_w : low_w + IMAGE_SIZE | |
| ] | |
| enhanced_image_cropped = enhanced_image[ | |
| low_h : low_h + IMAGE_SIZE, low_w : low_w + IMAGE_SIZE | |
| ] | |
| # in order to avoid `NONE` during shape inference | |
| low_image_cropped.set_shape([IMAGE_SIZE, IMAGE_SIZE, 3]) | |
| enhanced_image_cropped.set_shape([IMAGE_SIZE, IMAGE_SIZE, 3]) | |
| return low_image_cropped, enhanced_image_cropped | |
| def load_data(low_light_image_path, enhanced_image_path): | |
| low_light_image = read_image(low_light_image_path) | |
| enhanced_image = read_image(enhanced_image_path) | |
| low_light_image, enhanced_image = random_crop(low_light_image, enhanced_image) | |
| return low_light_image, enhanced_image | |
| def get_dataset(low_light_images, enhanced_images): | |
| dataset = tf.data.Dataset.from_tensor_slices((low_light_images, enhanced_images)) | |
| dataset = dataset.map(load_data, num_parallel_calls=tf.data.AUTOTUNE) | |
| dataset = dataset.batch(BATCH_SIZE, drop_remainder=True) | |
| return dataset | |
| train_low_light_images = sorted(glob("./lol_dataset/our485/low/*"))[:MAX_TRAIN_IMAGES] | |
| train_enhanced_images = sorted(glob("./lol_dataset/our485/high/*"))[:MAX_TRAIN_IMAGES] | |
| val_low_light_images = sorted(glob("./lol_dataset/our485/low/*"))[MAX_TRAIN_IMAGES:] | |
| val_enhanced_images = sorted(glob("./lol_dataset/our485/high/*"))[MAX_TRAIN_IMAGES:] | |
| test_low_light_images = sorted(glob("./lol_dataset/eval15/low/*")) | |
| test_enhanced_images = sorted(glob("./lol_dataset/eval15/high/*")) | |
| train_dataset = get_dataset(train_low_light_images, train_enhanced_images) | |
| val_dataset = get_dataset(val_low_light_images, val_enhanced_images) | |
| print("Train Dataset:", train_dataset.element_spec) | |
| print("Val Dataset:", val_dataset.element_spec) | |
| """ | |
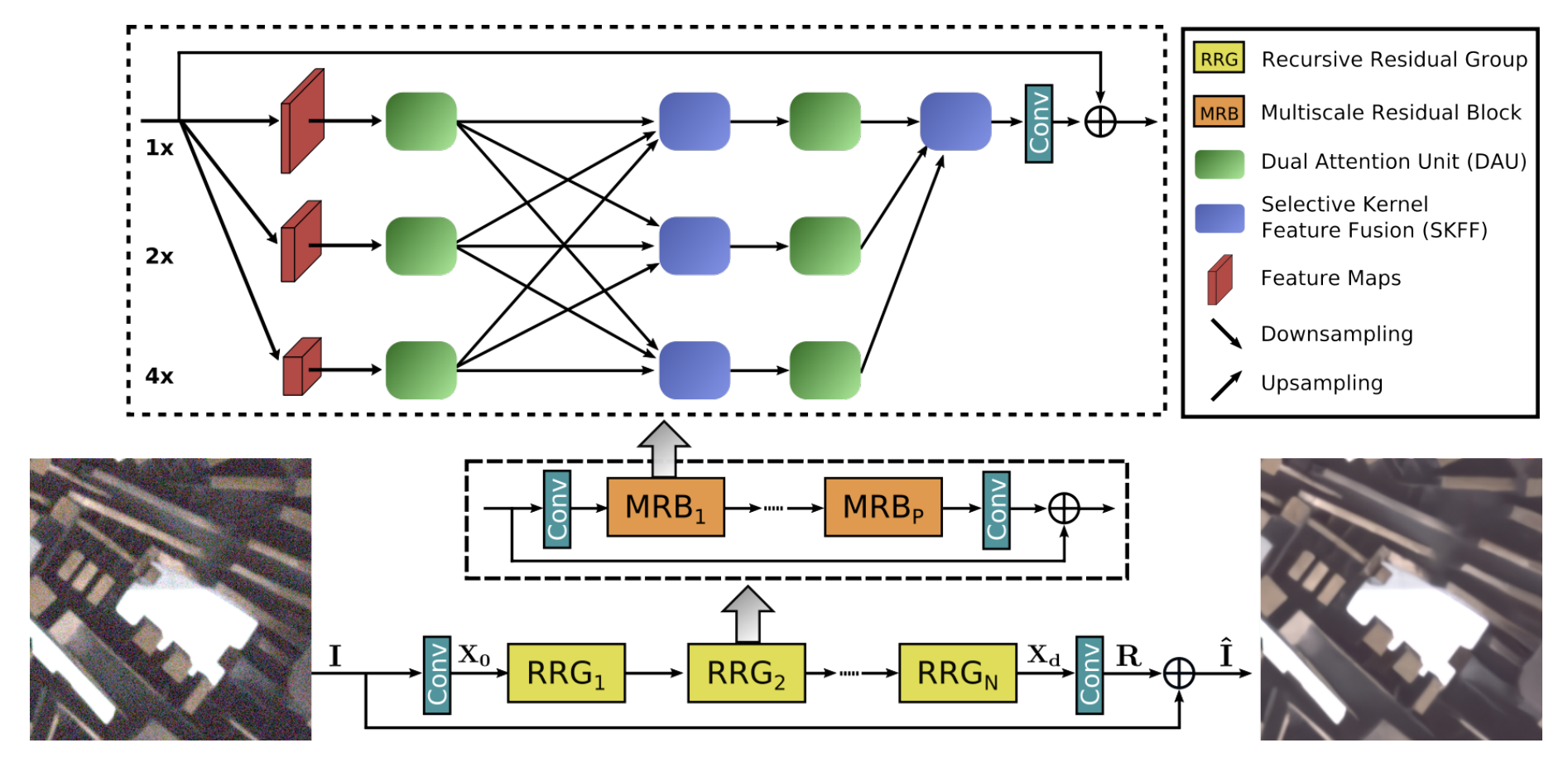
| ## MIRNet Model | |
| Here are the main features of the MIRNet model: | |
| - A feature extraction model that computes a complementary set of features across multiple | |
| spatial scales, while maintaining the original high-resolution features to preserve | |
| precise spatial details. | |
| - A regularly repeated mechanism for information exchange, where the features across | |
| multi-resolution branches are progressively fused together for improved representation | |
| learning. | |
| - A new approach to fuse multi-scale features using a selective kernel network | |
| that dynamically combines variable receptive fields and faithfully preserves | |
| the original feature information at each spatial resolution. | |
| - A recursive residual design that progressively breaks down the input signal | |
| in order to simplify the overall learning process, and allows the construction | |
| of very deep networks. | |
|  | |
| """ | |
| """ | |
| ### Selective Kernel Feature Fusion | |
| The Selective Kernel Feature Fusion or SKFF module performs dynamic adjustment of | |
| receptive fields via two operations: **Fuse** and **Select**. The Fuse operator generates | |
| global feature descriptors by combining the information from multi-resolution streams. | |
| The Select operator uses these descriptors to recalibrate the feature maps (of different | |
| streams) followed by their aggregation. | |
| **Fuse**: The SKFF receives inputs from three parallel convolution streams carrying | |
| different scales of information. We first combine these multi-scale features using an | |
| element-wise sum, on which we apply Global Average Pooling (GAP) across the spatial | |
| dimension. Next, we apply a channel- downscaling convolution layer to generate a compact | |
| feature representation which passes through three parallel channel-upscaling convolution | |
| layers (one for each resolution stream) and provides us with three feature descriptors. | |
| **Select**: This operator applies the softmax function to the feature descriptors to | |
| obtain the corresponding activations that are used to adaptively recalibrate multi-scale | |
| feature maps. The aggregated features are defined as the sum of product of the corresponding | |
| multi-scale feature and the feature descriptor. | |
|  | |
| """ | |
| def selective_kernel_feature_fusion( | |
| multi_scale_feature_1, multi_scale_feature_2, multi_scale_feature_3 | |
| ): | |
| channels = list(multi_scale_feature_1.shape)[-1] | |
| combined_feature = layers.Add()( | |
| [multi_scale_feature_1, multi_scale_feature_2, multi_scale_feature_3] | |
| ) | |
| gap = layers.GlobalAveragePooling2D()(combined_feature) | |
| channel_wise_statistics = layers.Reshape((1, 1, channels))(gap) | |
| compact_feature_representation = layers.Conv2D( | |
| filters=channels // 8, kernel_size=(1, 1), activation="relu" | |
| )(channel_wise_statistics) | |
| feature_descriptor_1 = layers.Conv2D( | |
| channels, kernel_size=(1, 1), activation="softmax" | |
| )(compact_feature_representation) | |
| feature_descriptor_2 = layers.Conv2D( | |
| channels, kernel_size=(1, 1), activation="softmax" | |
| )(compact_feature_representation) | |
| feature_descriptor_3 = layers.Conv2D( | |
| channels, kernel_size=(1, 1), activation="softmax" | |
| )(compact_feature_representation) | |
| feature_1 = multi_scale_feature_1 * feature_descriptor_1 | |
| feature_2 = multi_scale_feature_2 * feature_descriptor_2 | |
| feature_3 = multi_scale_feature_3 * feature_descriptor_3 | |
| aggregated_feature = layers.Add()([feature_1, feature_2, feature_3]) | |
| return aggregated_feature | |
| """ | |
| ### Dual Attention Unit | |
| The Dual Attention Unit or DAU is used to extract features in the convolutional streams. | |
| While the SKFF block fuses information across multi-resolution branches, we also need a | |
| mechanism to share information within a feature tensor, both along the spatial and the | |
| channel dimensions which is done by the DAU block. The DAU suppresses less useful | |
| features and only allows more informative ones to pass further. This feature | |
| recalibration is achieved by using **Channel Attention** and **Spatial Attention** | |
| mechanisms. | |
| The **Channel Attention** branch exploits the inter-channel relationships of the | |
| convolutional feature maps by applying squeeze and excitation operations. Given a feature | |
| map, the squeeze operation applies Global Average Pooling across spatial dimensions to | |
| encode global context, thus yielding a feature descriptor. The excitation operator passes | |
| this feature descriptor through two convolutional layers followed by the sigmoid gating | |
| and generates activations. Finally, the output of Channel Attention branch is obtained by | |
| rescaling the input feature map with the output activations. | |
| The **Spatial Attention** branch is designed to exploit the inter-spatial dependencies of | |
| convolutional features. The goal of Spatial Attention is to generate a spatial attention | |
| map and use it to recalibrate the incoming features. To generate the spatial attention | |
| map, the Spatial Attention branch first independently applies Global Average Pooling and | |
| Max Pooling operations on input features along the channel dimensions and concatenates | |
| the outputs to form a resultant feature map which is then passed through a convolution | |
| and sigmoid activation to obtain the spatial attention map. This spatial attention map is | |
| then used to rescale the input feature map. | |
|  | |
| """ | |
| class ChannelPooling(layers.Layer): | |
| def __init__(self, axis=-1, *args, **kwargs): | |
| super().__init__(*args, **kwargs) | |
| self.axis = axis | |
| self.concat = layers.Concatenate(axis=self.axis) | |
| def call(self, inputs): | |
| average_pooling = tf.expand_dims(tf.reduce_mean(inputs, axis=-1), axis=-1) | |
| max_pooling = tf.expand_dims(tf.reduce_max(inputs, axis=-1), axis=-1) | |
| return self.concat([average_pooling, max_pooling]) | |
| def get_config(self): | |
| config = super().get_config() | |
| config.update({"axis": self.axis}) | |
| def spatial_attention_block(input_tensor): | |
| compressed_feature_map = ChannelPooling(axis=-1)(input_tensor) | |
| feature_map = layers.Conv2D(1, kernel_size=(1, 1))(compressed_feature_map) | |
| feature_map = keras.activations.sigmoid(feature_map) | |
| return input_tensor * feature_map | |
| def channel_attention_block(input_tensor): | |
| channels = list(input_tensor.shape)[-1] | |
| average_pooling = layers.GlobalAveragePooling2D()(input_tensor) | |
| feature_descriptor = layers.Reshape((1, 1, channels))(average_pooling) | |
| feature_activations = layers.Conv2D( | |
| filters=channels // 8, kernel_size=(1, 1), activation="relu" | |
| )(feature_descriptor) | |
| feature_activations = layers.Conv2D( | |
| filters=channels, kernel_size=(1, 1), activation="sigmoid" | |
| )(feature_activations) | |
| return input_tensor * feature_activations | |
| def dual_attention_unit_block(input_tensor): | |
| channels = list(input_tensor.shape)[-1] | |
| feature_map = layers.Conv2D( | |
| channels, kernel_size=(3, 3), padding="same", activation="relu" | |
| )(input_tensor) | |
| feature_map = layers.Conv2D(channels, kernel_size=(3, 3), padding="same")( | |
| feature_map | |
| ) | |
| channel_attention = channel_attention_block(feature_map) | |
| spatial_attention = spatial_attention_block(feature_map) | |
| concatenation = layers.Concatenate(axis=-1)([channel_attention, spatial_attention]) | |
| concatenation = layers.Conv2D(channels, kernel_size=(1, 1))(concatenation) | |
| return layers.Add()([input_tensor, concatenation]) | |
| """ | |
| ### Multi-Scale Residual Block | |
| The Multi-Scale Residual Block is capable of generating a spatially-precise output by | |
| maintaining high-resolution representations, while receiving rich contextual information | |
| from low-resolutions. The MRB consists of multiple (three in this paper) | |
| fully-convolutional streams connected in parallel. It allows information exchange across | |
| parallel streams in order to consolidate the high-resolution features with the help of | |
| low-resolution features, and vice versa. The MIRNet employs a recursive residual design | |
| (with skip connections) to ease the flow of information during the learning process. In | |
| order to maintain the residual nature of our architecture, residual resizing modules are | |
| used to perform downsampling and upsampling operations that are used in the Multi-scale | |
| Residual Block. | |
|  | |
| """ | |
| # Recursive Residual Modules | |
| def down_sampling_module(input_tensor): | |
| channels = list(input_tensor.shape)[-1] | |
| main_branch = layers.Conv2D(channels, kernel_size=(1, 1), activation="relu")( | |
| input_tensor | |
| ) | |
| main_branch = layers.Conv2D( | |
| channels, kernel_size=(3, 3), padding="same", activation="relu" | |
| )(main_branch) | |
| main_branch = layers.MaxPooling2D()(main_branch) | |
| main_branch = layers.Conv2D(channels * 2, kernel_size=(1, 1))(main_branch) | |
| skip_branch = layers.MaxPooling2D()(input_tensor) | |
| skip_branch = layers.Conv2D(channels * 2, kernel_size=(1, 1))(skip_branch) | |
| return layers.Add()([skip_branch, main_branch]) | |
| def up_sampling_module(input_tensor): | |
| channels = list(input_tensor.shape)[-1] | |
| main_branch = layers.Conv2D(channels, kernel_size=(1, 1), activation="relu")( | |
| input_tensor | |
| ) | |
| main_branch = layers.Conv2D( | |
| channels, kernel_size=(3, 3), padding="same", activation="relu" | |
| )(main_branch) | |
| main_branch = layers.UpSampling2D()(main_branch) | |
| main_branch = layers.Conv2D(channels // 2, kernel_size=(1, 1))(main_branch) | |
| skip_branch = layers.UpSampling2D()(input_tensor) | |
| skip_branch = layers.Conv2D(channels // 2, kernel_size=(1, 1))(skip_branch) | |
| return layers.Add()([skip_branch, main_branch]) | |
| # MRB Block | |
| def multi_scale_residual_block(input_tensor, channels): | |
| # features | |
| level1 = input_tensor | |
| level2 = down_sampling_module(input_tensor) | |
| level3 = down_sampling_module(level2) | |
| # DAU | |
| level1_dau = dual_attention_unit_block(level1) | |
| level2_dau = dual_attention_unit_block(level2) | |
| level3_dau = dual_attention_unit_block(level3) | |
| # SKFF | |
| level1_skff = selective_kernel_feature_fusion( | |
| level1_dau, | |
| up_sampling_module(level2_dau), | |
| up_sampling_module(up_sampling_module(level3_dau)), | |
| ) | |
| level2_skff = selective_kernel_feature_fusion( | |
| down_sampling_module(level1_dau), | |
| level2_dau, | |
| up_sampling_module(level3_dau), | |
| ) | |
| level3_skff = selective_kernel_feature_fusion( | |
| down_sampling_module(down_sampling_module(level1_dau)), | |
| down_sampling_module(level2_dau), | |
| level3_dau, | |
| ) | |
| # DAU 2 | |
| level1_dau_2 = dual_attention_unit_block(level1_skff) | |
| level2_dau_2 = up_sampling_module((dual_attention_unit_block(level2_skff))) | |
| level3_dau_2 = up_sampling_module( | |
| up_sampling_module(dual_attention_unit_block(level3_skff)) | |
| ) | |
| # SKFF 2 | |
| skff_ = selective_kernel_feature_fusion(level1_dau_2, level2_dau_2, level3_dau_2) | |
| conv = layers.Conv2D(channels, kernel_size=(3, 3), padding="same")(skff_) | |
| return layers.Add()([input_tensor, conv]) | |
| """ | |
| ### MIRNet Model | |
| """ | |
| def recursive_residual_group(input_tensor, num_mrb, channels): | |
| conv1 = layers.Conv2D(channels, kernel_size=(3, 3), padding="same")(input_tensor) | |
| for _ in range(num_mrb): | |
| conv1 = multi_scale_residual_block(conv1, channels) | |
| conv2 = layers.Conv2D(channels, kernel_size=(3, 3), padding="same")(conv1) | |
| return layers.Add()([conv2, input_tensor]) | |
| def mirnet_model(num_rrg, num_mrb, channels): | |
| input_tensor = keras.Input(shape=[None, None, 3]) | |
| x1 = layers.Conv2D(channels, kernel_size=(3, 3), padding="same")(input_tensor) | |
| for _ in range(num_rrg): | |
| x1 = recursive_residual_group(x1, num_mrb, channels) | |
| conv = layers.Conv2D(3, kernel_size=(3, 3), padding="same")(x1) | |
| output_tensor = layers.Add()([input_tensor, conv]) | |
| return keras.Model(input_tensor, output_tensor) | |
| model = mirnet_model(num_rrg=3, num_mrb=2, channels=64) | |
| """ | |
| ## Training | |
| - We train MIRNet using **Charbonnier Loss** as the loss function and **Adam | |
| Optimizer** with a learning rate of `1e-4`. | |
| - We use **Peak Signal Noise Ratio** or PSNR as a metric which is an expression for the | |
| ratio between the maximum possible value (power) of a signal and the power of distorting | |
| noise that affects the quality of its representation. | |
| """ | |
| def charbonnier_loss(y_true, y_pred): | |
| return tf.reduce_mean(tf.sqrt(tf.square(y_true - y_pred) + tf.square(1e-3))) | |
| def peak_signal_noise_ratio(y_true, y_pred): | |
| return tf.image.psnr(y_pred, y_true, max_val=255.0) | |
| optimizer = keras.optimizers.Adam(learning_rate=1e-4) | |
| model.compile( | |
| optimizer=optimizer, | |
| loss=charbonnier_loss, | |
| metrics=[peak_signal_noise_ratio], | |
| ) | |
| history = model.fit( | |
| train_dataset, | |
| validation_data=val_dataset, | |
| epochs=50, | |
| callbacks=[ | |
| keras.callbacks.ReduceLROnPlateau( | |
| monitor="val_peak_signal_noise_ratio", | |
| factor=0.5, | |
| patience=5, | |
| verbose=1, | |
| min_delta=1e-7, | |
| mode="max", | |
| ) | |
| ], | |
| ) | |
| def plot_history(value, name): | |
| plt.plot(history.history[value], label=f"train_{name.lower()}") | |
| plt.plot(history.history[f"val_{value}"], label=f"val_{name.lower()}") | |
| plt.xlabel("Epochs") | |
| plt.ylabel(name) | |
| plt.title(f"Train and Validation {name} Over Epochs", fontsize=14) | |
| plt.legend() | |
| plt.grid() | |
| plt.show() | |
| plot_history("loss", "Loss") | |
| plot_history("peak_signal_noise_ratio", "PSNR") | |
| """ | |
| ## Inference | |
| """ | |
| def plot_results(images, titles, figure_size=(12, 12)): | |
| fig = plt.figure(figsize=figure_size) | |
| for i in range(len(images)): | |
| fig.add_subplot(1, len(images), i + 1).set_title(titles[i]) | |
| _ = plt.imshow(images[i]) | |
| plt.axis("off") | |
| plt.show() | |
| def infer(original_image): | |
| image = keras.utils.img_to_array(original_image) | |
| image = image.astype("float32") / 255.0 | |
| image = np.expand_dims(image, axis=0) | |
| output = model.predict(image, verbose=0) | |
| output_image = output[0] * 255.0 | |
| output_image = output_image.clip(0, 255) | |
| output_image = output_image.reshape( | |
| (np.shape(output_image)[0], np.shape(output_image)[1], 3) | |
| ) | |
| output_image = Image.fromarray(np.uint8(output_image)) | |
| original_image = Image.fromarray(np.uint8(original_image)) | |
| return output_image | |
| """ | |
| ### Inference on Test Images | |
| We compare the test images from LOLDataset enhanced by MIRNet with images | |
| enhanced via the `PIL.ImageOps.autocontrast()` function. | |
| You can use the trained model hosted on [Hugging Face Hub](https://huggingface.co/keras-io/lowlight-enhance-mirnet) | |
| and try the demo on [Hugging Face Spaces](https://huggingface.co/spaces/keras-io/Enhance_Low_Light_Image). | |
| """ | |
| for low_light_image in random.sample(test_low_light_images, 6): | |
| original_image = Image.open(low_light_image) | |
| enhanced_image = infer(original_image) | |
| plot_results( | |
| [original_image, ImageOps.autocontrast(original_image), enhanced_image], | |
| ["Original", "PIL Autocontrast", "MIRNet Enhanced"], | |
| (20, 12), | |
| ) | |