| # Recipe: One Step Off Policy Async Trainer |
|
|
| **Author:** `https://github.com/meituan-search` |
|
|
| Last updated: 07/17/2025. |
|
|
| ## Introduction |
|
|
| ### Background |
|
|
| The current reinforcement learning training process implemented by verl is synchronous, adhering to the algorithmic |
| workflows of established methods like PPO, GRPO, and DAPO. In each step, training samples are generated by the latest |
| model, and the model is updated after training completes. While this approach aligns with off-policy reinforcement |
| learning and stabilizes RL training, but it suffers from severe efficiency issues. |
| Model updates must wait for the longest output in the generation phase to complete. |
| During the generation of long-tail samples, GPUs remain idle, resulting in significant underutilization. |
| The more severe the long-tail problem in sample generation, the lower the overall training efficiency. |
| For example, in DAPO 32B training, the Rollout phase accounts for approximately 70% of the total time, |
| and increasing resources does not reduce the Rollout duration. |
|
|
| 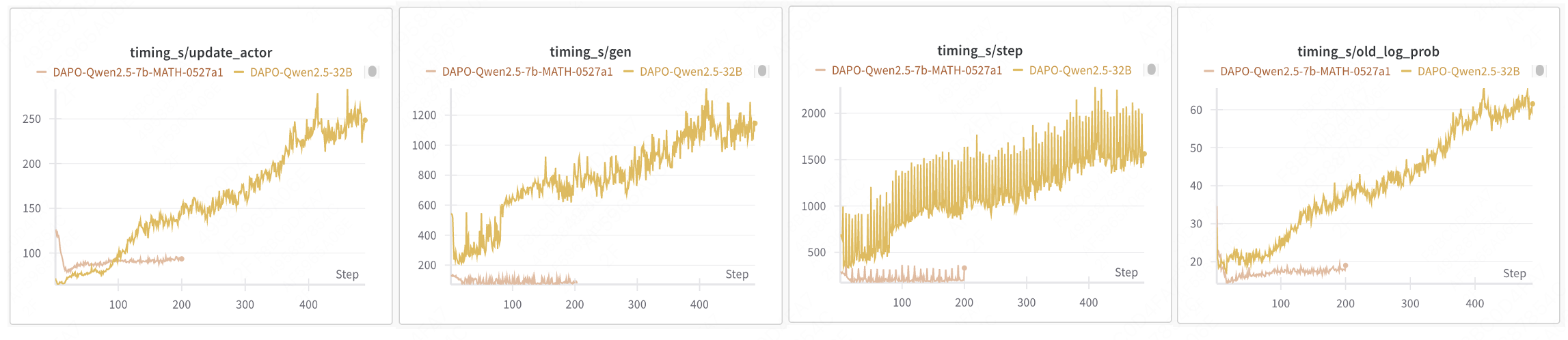 |
|
|
| > source data: https://wandb.ai/verl-org/DAPO%20Reproduction%20on%20verl/workspace?nw=nwusertongyuxuan361 |
|
|
| ### Solution |
|
|
| We have implemented the **One Step Off Async Trainer** to help alleviate this issue. This approach parallelizes the |
| generation and training processes, utilizing samples generated in the previous step for current training. |
| It also involves appropriately partitioning resources, allocating dedicated resources for generation while automatically |
| assigning the remainder to training. By reducing resources allocated to the generation phase, we mitigate GPU idle time |
| during long-tail sample generation. Throughout this process, generation and training parameters maintain a one-step off |
| policy. |
|
|
|  |
|
|
| > reference: [AReaL: A Large-Scale Asynchronous Reinforcement Learning System for Language Reasoning](https://arxiv.org/abs/2505.24298) |
|
|
| Our core contributions include: |
|
|
| 1. **Parallel Generation and Training**: |
| Samples for the next batch are asynchronously generated while the current batch is being trained. |
|
|
| 2. **Resource Isolation**: |
| Unlike `hybrid_engine`, this method requires explicit resource allocation for rollout, with remaining resources |
| automatically assigned to training. |
|
|
| 3. **NCCL Parameter Synchronization**: |
| Employs NCCL communication primitives for seamless parameter transfer between generation and training modules. |
|
|
| ### Experimental Results |
|
|
| - **Machine Configuration**: 2 nodes with 16 H20 GPUs each |
| - Generation: 4 GPUs |
| - Training: 12 GPUs |
| - **Model**: Qwen2.5-Math-7B |
| - **Rollout Configuration**: |
| - **Max Response Length**: FSDP2: 20,480 tokens; Megatron: 8,192 tokens |
| - **Algorithm**: DAPO |
| - **Rollout Engine**: vLLM |
|
|
| | training mode | engine | step | gen | wait_prev_gen | generate_sequences | old_log_prob | update_actor | total time | acc/best@32/mean | acc/maj@32/mean | |
| | ---------------------- | ------------- | ---- | --- | ------------- | ------------------ | ------------ | ------------ | -------------- | ---------------- | --------------- | |
| | colocate sync | VLLM+FSDP2 | 749 | 321 | - | 247 | 88 | 286 | 19h18m | 0.5948 | 0.417 | |
| | one-step-overlap async | VLLM+FSDP2 | 520 | - | 45 | 458 | 108 | 337 | 15h34m(+23%) | 0.6165 | 0.494 | |
| | colocate sync | VLLM+Megatron | 699 | 207 | - | 162 | 119 | 344 | 18h21m | 0.605 | 0.4217 | |
| | one-step-overlap async | VLLM+Megatron | 566 | - | 59 | 501 | 120 | 347 | 13h06m (+40%) | 0.6569 | 0.4038 | |
|
|
| - colocate sync: step ≈ gen + old_log_prob + update_actor |
| - one-step-overlap async: step ≈ wait_prev_gen + old_log_prob + update_actor |
|
|
| 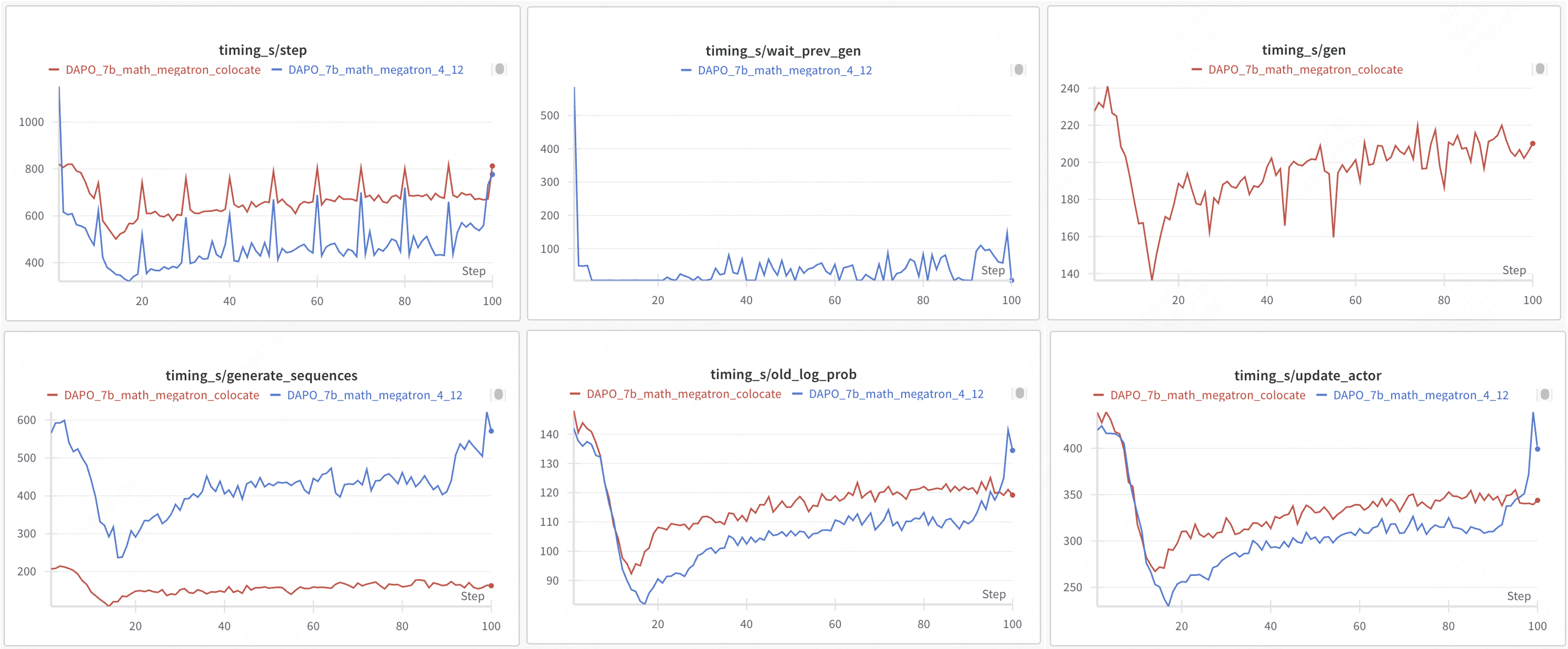 |
|
|
| > source data: https://wandb.ai/hou-zg-meituan/one-step-off-policy?nw=nwuserhouzg |
|
|
| ## Implementation |
|
|
| ### One Step Off Policy Async Pipeline |
|
|
| Our implemented **One Step Off Policy Async Pipeline** integrates seamlessly into existing training logic at minimal |
| cost, |
| eliminating the need for additional sample storage management. The core mechanism uses `async_gen_next_batch` |
| for asynchronous rollout generation while maintaining continuous operation during epoch transitions |
| via `create_continuous_iterator`. |
|
|
| ```python |
| # iterator generator, simplify one-step integration of the training process |
| def _create_continuous_iterator(self): |
| for epoch in range(self.config.trainer.total_epochs): |
| iterator = iter(self.train_dataloader) |
| for batch_dict in iterator: |
| yield epoch, batch_dict |
| |
| |
| # read next batch samples, parameters sync and launch asyn gen_seq |
| def _async_gen_next_batch(self, continuous_iterator): |
| # read train_data |
| try: |
| epoch, batch_dict = next(continuous_iterator) |
| except StopIteration: |
| return None |
| batch = DataProto.from_single_dict(batch_dict) |
| gen_batch = batch_pocess(batch) |
| # sync weights from actor to rollout |
| self.sync_rollout_weights() |
| # async generation |
| gen_batch_output = self.rollout_wg.async_generate_sequences(gen_batch) |
| # future encapsulated |
| return GenerationBatchFuture(epoch, batch, gen_batch_output) |
| |
| |
| continuous_iterator = self._create_continuous_iterator() |
| # run rollout first to achieve one-step-off |
| batch_data_future = self._async_gen_next_batch(continuous_iterator) |
| |
| while batch_data_future is not None: |
| # wait for the gen_seq result from the previous step |
| batch = batch_data_future.get() |
| # launch the next async call to generate sequences |
| batch_data_future = self._async_gen_next_batch(continuous_iterator) |
| |
| # compute advantages |
| batch = critic.compute_values(batch) |
| batch = reference.compute_log_prob(batch) |
| batch = reward.compute_reward(batch) |
| batch = compute_advantages(batch) |
| |
| # model update |
| critic_metrics = critic.update_critic(batch) |
| actor_metrics = actor.update_actor(batch) |
| ``` |
|
|
| ### Parameter Synchronization |
|
|
| The exciting point is that our nccl based weights updating for rollout model has great performance. |
| At most of time, the latency is under 300ms, which is negligible for RLHF. |
|
|
| > **sync_rollout_weights**:The time for synchronizing parameters from actor to rollout is extremely fast and can almost |
| > be ignored because it is implemented with nccl. |
|
|
| ```python |
| class ActorRolloutRefWorker: |
| # actor acquires the meta-info of model parameters for parameter sync |
| @register(dispatch_mode=Dispatch.ONE_TO_ALL) |
| def get_actor_weights_info(self): |
| params = self._get_actor_params() |
| ret = [] |
| for key, tensor in params.items(): |
| ret.append((key, tensor.size(), tensor.dtype)) |
| self._weights_info = ret |
| return ret |
| |
| # rollout sets the meta-info of model parameters for parameter sync |
| @register(dispatch_mode=Dispatch.ONE_TO_ALL) |
| def set_actor_weights_info(self, weights_info): |
| self._weights_info = weights_info |
| |
| |
| class AsyncRayPPOTrainer(RayPPOTrainer): |
| def init_workers(self): |
| ... |
| # rollout obtains the meta-info of model parameters from the actor for parameter sync |
| weights_info = self.actor_wg.get_actor_weights_info()[0] |
| self.rollout_wg.set_actor_weights_info(weights_info) |
| |
| # Create an actor-rollout communication group for parameter sync |
| self.create_weight_sync_group |
| ``` |
|
|
| ```python |
| # The driving process invokes the actor and rollout respectively to create a weight synchronization group based on nccl/hccl. |
| def create_weight_sync_group(self): |
| master_address = ray.get(self.actor_wg.workers[0]._get_node_ip.remote()) |
| master_port = ray.get(self.actor_wg.workers[0]._get_free_port.remote()) |
| world_size = len(self.actor_wg.workers + self.rollout_wg.workers) |
| self.actor_wg.create_weight_sync_group( |
| master_address, |
| master_port, |
| 0, |
| world_size, |
| ) |
| ray.get( |
| self.rollout_wg.create_weight_sync_group( |
| master_address, |
| master_port, |
| len(self.actor_wg.workers), |
| world_size, |
| ) |
| ) |
| |
| # drive process call the actor and rollout respectively to sync parameters by nccl |
| def sync_rollout_weights(self): |
| self.actor_wg.sync_rollout_weights() |
| ray.get(self.rollout_wg.sync_rollout_weights()) |
| |
| |
| # fsdp model parameter sync |
| @register(dispatch_mode=Dispatch.ONE_TO_ALL, blocking=False) |
| def sync_rollout_weights(self): |
| params = self._get_actor_params() if self._is_actor else None |
| if self._is_rollout: |
| inference_model = ( |
| self.rollout.inference_engine.llm_engine.model_executor.driver_worker.worker.model_runner.model |
| ) |
| from verl.utils.vllm.patch import patch_vllm_moe_model_weight_loader |
| patch_vllm_moe_model_weight_loader(inference_model) |
| # Model parameters are broadcast tensor-by-tensor from actor to rollout |
| for key, shape, dtype in self._weights_info: |
| tensor = torch.empty(shape, dtype=dtype, device=get_torch_device().current_device()) |
| if self._is_actor: |
| assert key in params |
| origin_data = params[key] |
| if hasattr(origin_data, "full_tensor"): |
| origin_data = origin_data.full_tensor() |
| if torch.distributed.get_rank() == 0: |
| tensor.copy_(origin_data) |
| from ray.util.collective import collective |
| |
| collective.broadcast(tensor, src_rank=0, group_name="actor_rollout") |
| if self._is_rollout: |
| inference_model.load_weights([(key, tensor)]) |
| ``` |
|
|
| ### PPO Correctness |
|
|
| To ensure the correctness of the PPO algorithm, we use rollout log_probs for PPO importance sampling. |
| For the related algorithm details, please refer to: https://verl.readthedocs.io/en/latest/algo/rollout_corr_math.html |
| The default mode is `bypass_ppo_clip`, but other modification strategies can also be explored. |
| |
| ### AgentLoop |
| |
| In the current implementation, we no longer provide SPMD model rollout mode. |
| Instead, we have switched to AgentLoop mode, which also supports multi-turn tool calling. |
| |
| ## Usage |
| |
| ### FSDP2 Configuration Example |
| |
| ```shell |
| python3 -m verl.experimental.one_step_off_policy.async_main_ppo \ |
| --config-path=config \ |
| --config-name='one_step_off_ppo_trainer.yaml' \ |
| actor_rollout_ref.actor.strategy=fsdp2 \ |
| # actor and rollout are placed separately |
| actor_rollout_ref.hybrid_engine=False \ |
| # actor and rollout resource |
| trainer.nnodes=1 \ |
| trainer.n_gpus_per_node=6 \ |
| rollout.nnodes=1 \ |
| rollout.n_gpus_per_node=2 |
| ``` |
| |
| ### Megatron Configuration Example |
|
|
| ```shell |
| python3 -m verl.experimental.one_step_off_policy.async_main_ppo \ |
| --config-path=config \ |
| --config-name='one_step_off_ppo_megatron_trainer.yaml' \ |
| actor_rollout_ref.actor.strategy=megatron \ |
| # actor and rollout are placed separately |
| actor_rollout_ref.hybrid_engine=False \ |
| # actor and rollout resource |
| trainer.nnodes=1 \ |
| trainer.n_gpus_per_node=6 \ |
| rollout.nnodes=1 \ |
| rollout.n_gpus_per_node=2 |
| ``` |
|
|
| ### Configuration Guidelines |
|
|
| 1. **Card Number Relationships** |
| Maintain either of these relationships for optimal batch distribution: |
|
|
| - `actor_rollout_ref.rollout.n` should be an integer divisor of: |
| `trainer.n_gpus_per_node * trainer.nnodes` |
| - `actor_rollout_ref.rollout.n * data.train_batch_size` should be evenly divisible by: |
| `trainer.n_gpus_per_node * trainer.nnodes` |
| |
| > Rationale: Ensures training samples can be evenly distributed across training GPUs when using partial resources for |
| > generation. |
|
|
| 2. **Dynamic Resource Tuning** |
| Adjust `trainer.nnodes` `trainer.n_gpus_per_node` `rollout.nnodes` `rollout.n_gpus_per_node` based on phase |
| durations: |
| - **Ideal state**: Rollout and training phases have comparable durations |
| - **Diagnostic metrics**: |
| - Monitor `wait_prev_gen` duration |
| - Analyze `sequence_length` distribution |
| - **Adjustment strategy**: |
| - High `wait_prev_gen` + uniform sequence lengths → Increase rollout resources |
| - High `wait_prev_gen` + long-tail sequences → Optimize stopping criteria (resource increase won't help) |
| > **wait_prev_gen**:The time consumed waiting for the previous rollout to end (the part that is not fully |
| > overlapped). |
| > **Resource Configuration Strategies:** |
| - **Resource-constrained scenario**: Optimize resource utilization by adjusting GPU allocation ratios, |
| keeping the number of nodes equal to allow training and rollout to share nodes; |
| - Configure `trainer.nnodes = rollout.nnodes` with |
| `trainer.n_gpus_per_node + rollout.n_gpus_per_node = physical_gpus_per_node`. Control rollout resource |
| allocation by adjusting `n_gpus_per_node`. |
| - **Resource-abundant scenario**: Optimize performance by adjusting the number of nodes, |
| keeping the number of GPUs per node equal to enable independent scaling of training and rollout |
| parallelism. |
| - Configure `trainer.n_gpus_per_node = rollout.n_gpus_per_node` and control rollout resource allocation by |
| adjusting `trainer.nnodes` and `rollout.nnodes`to achieve optimal performance. |
| > **Note**: The total number of nodes required by the system is not simply `trainer.nnodes + rollout.nnodes`. The |
| > actual calculation depends on GPU capacity: |
| > |
| > - When `trainer.n_gpus_per_node + rollout.n_gpus_per_node <= physical_gpus_per_node`, |
| > the required node count is `max(trainer.nnodes, rollout.nnodes)` |
| > - When `trainer.n_gpus_per_node + rollout.n_gpus_per_node > physical_gpus_per_node`, |
| > the required node count is `trainer.nnodes + rollout.nnodes` |
| |
| ## Functional Support |
|
|
| | Category | Support Situation | |
| | ------------------ | --------------------------------------------------------------------------------------------------------------- | |
| | train engine | FSDP2 <br/> Megatron | |
| | rollout engine | vLLM | |
| | AdvantageEstimator | GRPO <br/> GRPO_PASSK <br/> REINFORCE_PLUS_PLUS <br/> RLOO <br/> OPO <br/> REINFORCE_PLUS_PLUS_BASELINE<br/>GPG | |
| | Reward | all | |
|
|
