

Update README.md
Browse files
README.md
CHANGED
|
@@ -3,197 +3,32 @@ library_name: transformers
|
|
| 3 |
tags: []
|
| 4 |
---
|
| 5 |
|
| 6 |
-
#
|
| 7 |
|
| 8 |
-
|
| 9 |
|
|
|
|
| 10 |
|
|
|
|
| 11 |
|
| 12 |
-
|
| 13 |
-
|
| 14 |
-
### Model Description
|
| 15 |
-
|
| 16 |
-
<!-- Provide a longer summary of what this model is. -->
|
| 17 |
-
|
| 18 |
-
This is the model card of a 🤗 transformers model that has been pushed on the Hub. This model card has been automatically generated.
|
| 19 |
-
|
| 20 |
-
- **Developed by:** [More Information Needed]
|
| 21 |
-
- **Funded by [optional]:** [More Information Needed]
|
| 22 |
-
- **Shared by [optional]:** [More Information Needed]
|
| 23 |
-
- **Model type:** [More Information Needed]
|
| 24 |
-
- **Language(s) (NLP):** [More Information Needed]
|
| 25 |
-
- **License:** [More Information Needed]
|
| 26 |
-
- **Finetuned from model [optional]:** [More Information Needed]
|
| 27 |
-
|
| 28 |
-
### Model Sources [optional]
|
| 29 |
-
|
| 30 |
-
<!-- Provide the basic links for the model. -->
|
| 31 |
-
|
| 32 |
-
- **Repository:** [More Information Needed]
|
| 33 |
-
- **Paper [optional]:** [More Information Needed]
|
| 34 |
-
- **Demo [optional]:** [More Information Needed]
|
| 35 |
-
|
| 36 |
-
## Uses
|
| 37 |
-
|
| 38 |
-
<!-- Address questions around how the model is intended to be used, including the foreseeable users of the model and those affected by the model. -->
|
| 39 |
-
|
| 40 |
-
### Direct Use
|
| 41 |
-
|
| 42 |
-
<!-- This section is for the model use without fine-tuning or plugging into a larger ecosystem/app. -->
|
| 43 |
-
|
| 44 |
-
[More Information Needed]
|
| 45 |
-
|
| 46 |
-
### Downstream Use [optional]
|
| 47 |
-
|
| 48 |
-
<!-- This section is for the model use when fine-tuned for a task, or when plugged into a larger ecosystem/app -->
|
| 49 |
-
|
| 50 |
-
[More Information Needed]
|
| 51 |
-
|
| 52 |
-
### Out-of-Scope Use
|
| 53 |
-
|
| 54 |
-
<!-- This section addresses misuse, malicious use, and uses that the model will not work well for. -->
|
| 55 |
-
|
| 56 |
-
[More Information Needed]
|
| 57 |
-
|
| 58 |
-
## Bias, Risks, and Limitations
|
| 59 |
-
|
| 60 |
-
<!-- This section is meant to convey both technical and sociotechnical limitations. -->
|
| 61 |
-
|
| 62 |
-
[More Information Needed]
|
| 63 |
-
|
| 64 |
-
### Recommendations
|
| 65 |
-
|
| 66 |
-
<!-- This section is meant to convey recommendations with respect to the bias, risk, and technical limitations. -->
|
| 67 |
-
|
| 68 |
-
Users (both direct and downstream) should be made aware of the risks, biases and limitations of the model. More information needed for further recommendations.
|
| 69 |
-
|
| 70 |
-
## How to Get Started with the Model
|
| 71 |
-
|
| 72 |
-
Use the code below to get started with the model.
|
| 73 |
-
|
| 74 |
-
[More Information Needed]
|
| 75 |
-
|
| 76 |
-
## Training Details
|
| 77 |
-
|
| 78 |
-
### Training Data
|
| 79 |
-
|
| 80 |
-
<!-- This should link to a Dataset Card, perhaps with a short stub of information on what the training data is all about as well as documentation related to data pre-processing or additional filtering. -->
|
| 81 |
-
|
| 82 |
-
[More Information Needed]
|
| 83 |
-
|
| 84 |
-
### Training Procedure
|
| 85 |
-
|
| 86 |
-
<!-- This relates heavily to the Technical Specifications. Content here should link to that section when it is relevant to the training procedure. -->
|
| 87 |
-
|
| 88 |
-
#### Preprocessing [optional]
|
| 89 |
-
|
| 90 |
-
[More Information Needed]
|
| 91 |
-
|
| 92 |
-
|
| 93 |
-
#### Training Hyperparameters
|
| 94 |
-
|
| 95 |
-
- **Training regime:** [More Information Needed] <!--fp32, fp16 mixed precision, bf16 mixed precision, bf16 non-mixed precision, fp16 non-mixed precision, fp8 mixed precision -->
|
| 96 |
-
|
| 97 |
-
#### Speeds, Sizes, Times [optional]
|
| 98 |
-
|
| 99 |
-
<!-- This section provides information about throughput, start/end time, checkpoint size if relevant, etc. -->
|
| 100 |
-
|
| 101 |
-
[More Information Needed]
|
| 102 |
|
| 103 |
-
|
|
|
|
|
|
|
|
|
|
| 104 |
|
| 105 |
-
<!-- This section describes the evaluation protocols and provides the results. -->
|
| 106 |
|
| 107 |
-
|
| 108 |
-
|
| 109 |
-
|
| 110 |
-
|
| 111 |
-
<!-- This should link to a Dataset Card if possible. -->
|
| 112 |
-
|
| 113 |
-
[More Information Needed]
|
| 114 |
-
|
| 115 |
-
#### Factors
|
| 116 |
-
|
| 117 |
-
<!-- These are the things the evaluation is disaggregating by, e.g., subpopulations or domains. -->
|
| 118 |
-
|
| 119 |
-
[More Information Needed]
|
| 120 |
-
|
| 121 |
-
#### Metrics
|
| 122 |
-
|
| 123 |
-
<!-- These are the evaluation metrics being used, ideally with a description of why. -->
|
| 124 |
-
|
| 125 |
-
[More Information Needed]
|
| 126 |
-
|
| 127 |
-
### Results
|
| 128 |
-
|
| 129 |
-
[More Information Needed]
|
| 130 |
-
|
| 131 |
-
#### Summary
|
| 132 |
-
|
| 133 |
-
|
| 134 |
-
|
| 135 |
-
## Model Examination [optional]
|
| 136 |
-
|
| 137 |
-
<!-- Relevant interpretability work for the model goes here -->
|
| 138 |
-
|
| 139 |
-
[More Information Needed]
|
| 140 |
-
|
| 141 |
-
## Environmental Impact
|
| 142 |
-
|
| 143 |
-
<!-- Total emissions (in grams of CO2eq) and additional considerations, such as electricity usage, go here. Edit the suggested text below accordingly -->
|
| 144 |
-
|
| 145 |
-
Carbon emissions can be estimated using the [Machine Learning Impact calculator](https://mlco2.github.io/impact#compute) presented in [Lacoste et al. (2019)](https://arxiv.org/abs/1910.09700).
|
| 146 |
-
|
| 147 |
-
- **Hardware Type:** [More Information Needed]
|
| 148 |
-
- **Hours used:** [More Information Needed]
|
| 149 |
-
- **Cloud Provider:** [More Information Needed]
|
| 150 |
-
- **Compute Region:** [More Information Needed]
|
| 151 |
-
- **Carbon Emitted:** [More Information Needed]
|
| 152 |
-
|
| 153 |
-
## Technical Specifications [optional]
|
| 154 |
-
|
| 155 |
-
### Model Architecture and Objective
|
| 156 |
-
|
| 157 |
-
[More Information Needed]
|
| 158 |
-
|
| 159 |
-
### Compute Infrastructure
|
| 160 |
-
|
| 161 |
-
[More Information Needed]
|
| 162 |
-
|
| 163 |
-
#### Hardware
|
| 164 |
-
|
| 165 |
-
[More Information Needed]
|
| 166 |
-
|
| 167 |
-
#### Software
|
| 168 |
-
|
| 169 |
-
[More Information Needed]
|
| 170 |
-
|
| 171 |
-
## Citation [optional]
|
| 172 |
-
|
| 173 |
-
<!-- If there is a paper or blog post introducing the model, the APA and Bibtex information for that should go in this section. -->
|
| 174 |
-
|
| 175 |
-
**BibTeX:**
|
| 176 |
-
|
| 177 |
-
[More Information Needed]
|
| 178 |
-
|
| 179 |
-
**APA:**
|
| 180 |
-
|
| 181 |
-
[More Information Needed]
|
| 182 |
-
|
| 183 |
-
## Glossary [optional]
|
| 184 |
-
|
| 185 |
-
<!-- If relevant, include terms and calculations in this section that can help readers understand the model or model card. -->
|
| 186 |
-
|
| 187 |
-
[More Information Needed]
|
| 188 |
-
|
| 189 |
-
## More Information [optional]
|
| 190 |
-
|
| 191 |
-
[More Information Needed]
|
| 192 |
|
| 193 |
-
|
| 194 |
|
| 195 |
-
[More Information Needed]
|
| 196 |
|
| 197 |
-
##
|
|
|
|
| 198 |
|
| 199 |
-
|
|
|
|
|
|
| 3 |
tags: []
|
| 4 |
---
|
| 5 |
|
| 6 |
+
# Poseless-3B
|
| 7 |
|
| 8 |
+
|
| 9 |
|
| 10 |
+
## Introduction
|
| 11 |
|
| 12 |
+
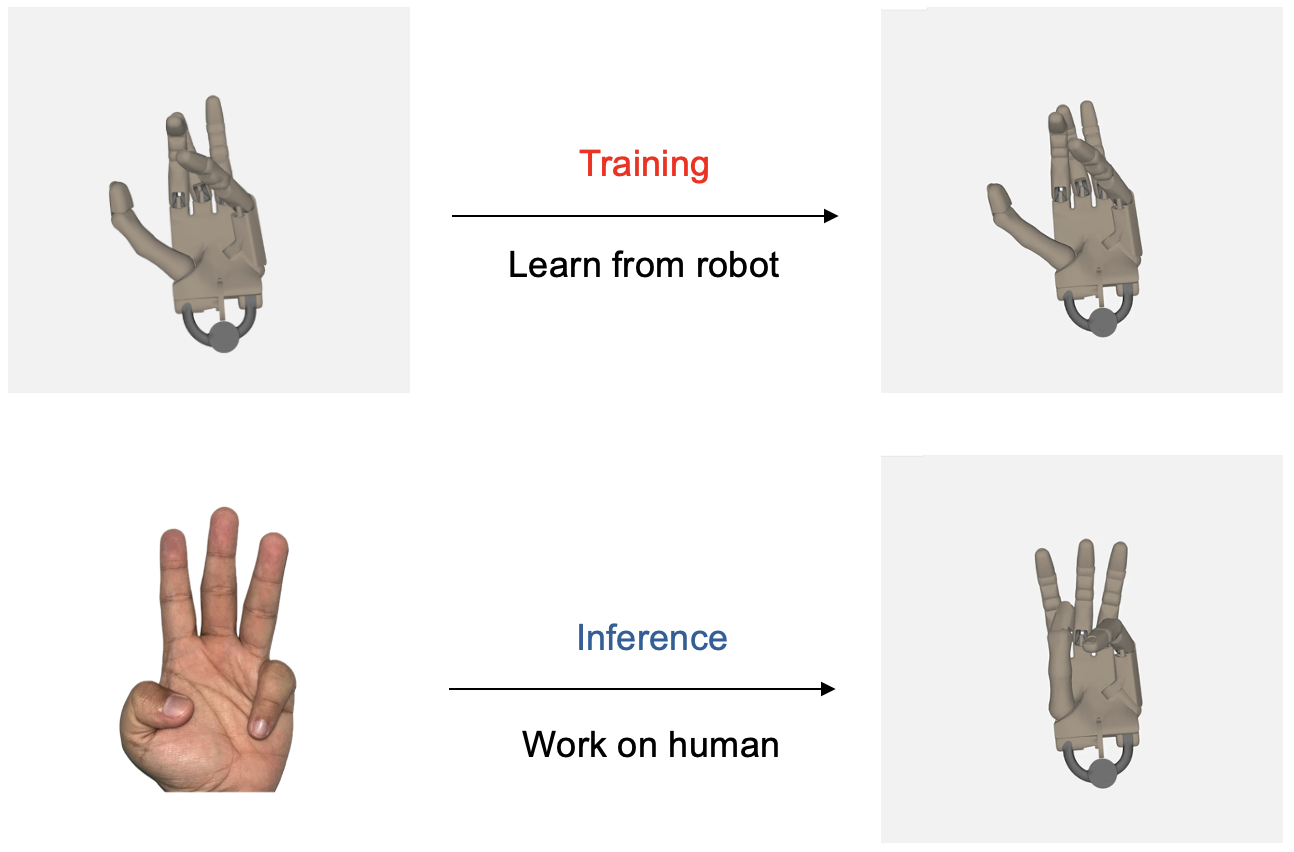
"PoseLess: Depth-Free Vision-to-Joint Control via Direct Image Mapping with VLM," introduces a novel framework for robot hand control that eliminates the need for explicit pose estimation by directly mapping 2D images to joint angles using projected representations. Our approach leverages synthetic training data generated through randomized joint configurations, enabling zero-shot generalization to real-world scenarios and cross-morphology transfer from robotic to human hands. By projecting visual inputs and employing a transformer-based decoder, PoseLess achieves robust, low-latency control while addressing challenges such as depth ambiguity and data scarcity. Experimental results demonstrate competitive performance in joint angle prediction accuracy without relying on any human-labelled dataset
|
| 13 |
|
| 14 |
+
Our key contributions are as follows:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 15 |
|
| 16 |
+
* We introduce a novel framework that leverages a VLM (e.g., Qwen 2.5 3B Instruct) to directly map monocular images to robot joint angles, bypassing pose estimation entirely. The VLM’s ability to "see" and project images enables robust, morphology-agnostic feature extraction, reducing error propagation inherent in two-stage pipelines.
|
| 17 |
+
* We introduce a synthetic data pipeline generates infinite training examples by randomizing joint angles and domain-randomizing visual features (e.g., lighting, textures). This eliminates reliance on costly labeled datasets while ensuring robustness to real-world variations.
|
| 18 |
+
* We provide evidence of the model’s cross-morphology generalization, demonstrating its ability to mimic human hand movements despite being trained solely on robot hand data. These findings mark a significant step toward understanding and leveraging such generalization for broader applications.
|
| 19 |
+
* We provide evidence that depth-free control is possible paving way for later adoption with camera that is not supporting depth estimation capability that is frequently used in robotics research.
|
| 20 |
|
|
|
|
| 21 |
|
| 22 |
+
## Model Details
|
| 23 |
+
* Developed by: Alan Dao, Dinh Bach Vu, Tuan Le Duc Anh, Bui Quang Huy (Menlo Research)
|
| 24 |
+
* Model type: Qwen 2.5 3B Instruct, fine-tuned for hand pose estimation
|
| 25 |
+
* License: Apache-2.0 license
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 26 |
|
| 27 |
+
# How to Get Started
|
| 28 |
|
|
|
|
| 29 |
|
| 30 |
+
## Citation
|
| 31 |
+
BibTeX: [More Information Needed]
|
| 32 |
|
| 33 |
+
## More Information
|
| 34 |
+
* Contact the authors at alan@menlo.ai, bach@menlo.ai, charles@menlo.ai, yuuki@menlo.ai for further details.
|