

| base_model: facebook/vit-mae-base | |
| library_name: transformers | |
| pipeline_tag: image-classification | |
| tags: | |
| - probex | |
| - model-j | |
| - weight-space-learning | |
| # Model-J: MAE Model (model_idx_0753) | |
| This model is part of the **Model-J** dataset, introduced in: | |
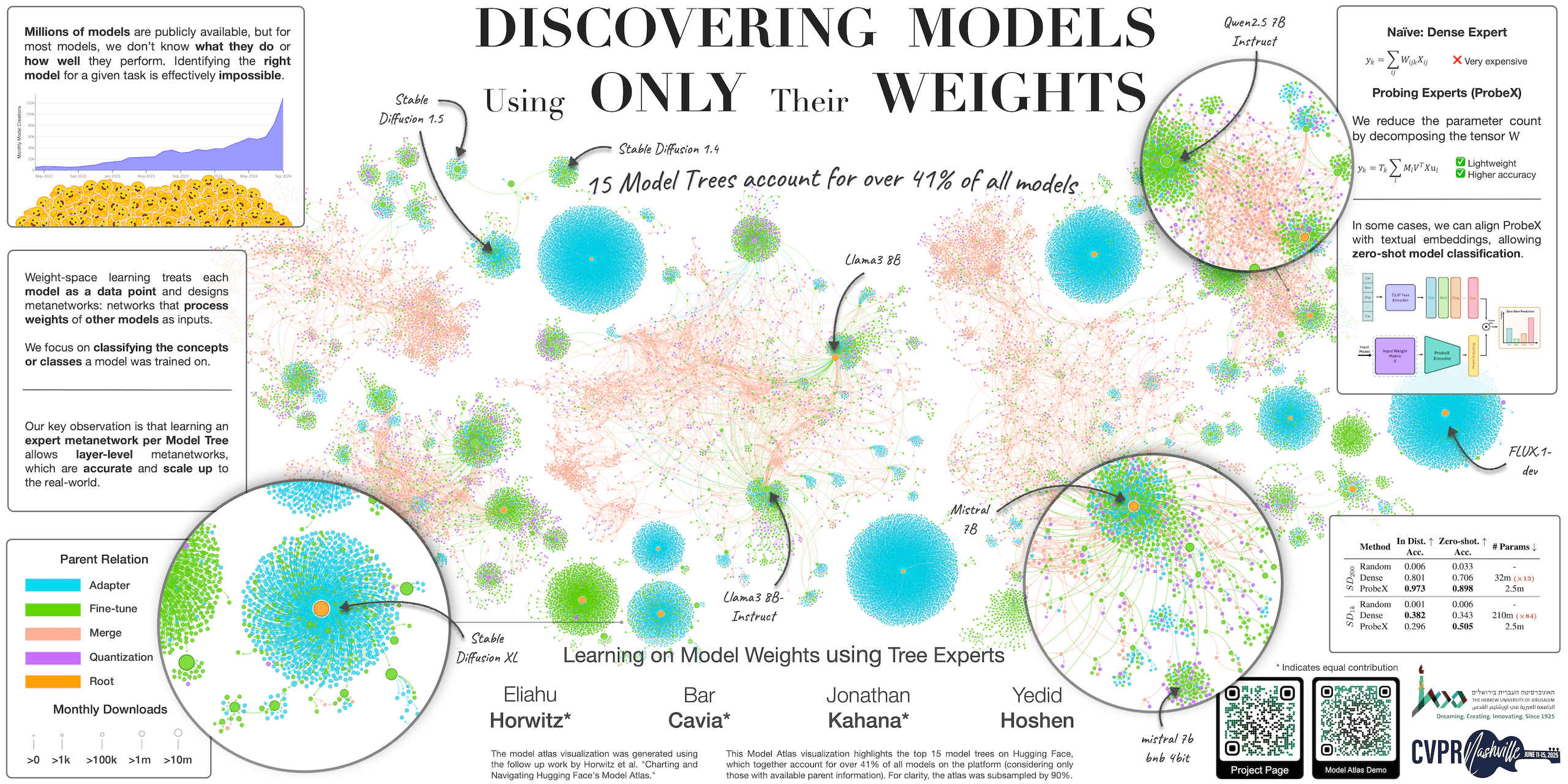
| **Learning on Model Weights using Tree Experts** (CVPR 2025) by Eliahu Horwitz*, Bar Cavia*, Jonathan Kahana*, Yedid Hoshen | |
| <p align="center"> | |
| 🌐 <a href="https://horwitz.ai/probex" target="_blank">Project</a> | 📃 <a href="https://arxiv.org/abs/2410.13569" target="_blank">Paper</a> | 💻 <a href="https://github.com/eliahuhorwitz/ProbeX" target="_blank">GitHub</a> | 🤗 <a href="https://huggingface.co/ProbeX" target="_blank">Dataset</a> | |
| </p> | |
|  | |
| ## Model Details | |
| | Attribute | Value | | |
| |---|---| | |
| | **Subset** | MAE | | |
| | **Split** | train | | |
| | **Base Model** | `facebook/vit-mae-base` | | |
| | **Dataset** | CIFAR100 (50 classes) | | |
| ## Training Hyperparameters | |
| | Parameter | Value | | |
| |---|---| | |
| | Learning Rate | 7e-05 | | |
| | LR Scheduler | constant | | |
| | Epochs | 7 | | |
| | Max Train Steps | 2331 | | |
| | Batch Size | 64 | | |
| | Weight Decay | 0.005 | | |
| | Seed | 753 | | |
| | Random Crop | True | | |
| | Random Flip | True | | |
| ## Performance | |
| | Metric | Value | | |
| |---|---| | |
| | Train Accuracy | 0.9681 | | |
| | Val Accuracy | 0.8579 | | |
| | Test Accuracy | 0.8550 | | |
| ## Training Categories | |
| The model was fine-tuned on the following 50 CIFAR100 classes: | |
| `spider`, `cloud`, `bottle`, `otter`, `couch`, `flatfish`, `beaver`, `lamp`, `snail`, `shark`, `willow_tree`, `keyboard`, `girl`, `sea`, `seal`, `lawn_mower`, `telephone`, `table`, `lion`, `hamster`, `house`, `cup`, `bicycle`, `worm`, `wolf`, `tulip`, `fox`, `leopard`, `mushroom`, `lizard`, `baby`, `tiger`, `sweet_pepper`, `bed`, `bowl`, `can`, `crab`, `kangaroo`, `woman`, `apple`, `maple_tree`, `bridge`, `forest`, `camel`, `dolphin`, `television`, `butterfly`, `palm_tree`, `streetcar`, `plate` | |