Improve dataset card: add paper link, GitHub link, and metadata
#2
by nielsr HF Staff - opened
README.md
CHANGED
|
@@ -1,5 +1,51 @@
|
|
| 1 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 |
|
| 3 |
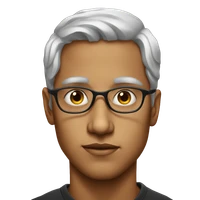
VRGaze dataset sample:
|
| 4 |
|
| 5 |
-

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
---
|
| 2 |
+
task_categories:
|
| 3 |
+
- other
|
| 4 |
+
tags:
|
| 5 |
+
- computer-vision
|
| 6 |
+
- gaze-estimation
|
| 7 |
+
- virtual-reality
|
| 8 |
+
---
|
| 9 |
+
|
| 10 |
+
# VRGaze: A Large-scale Dataset for VR Gaze Estimation
|
| 11 |
+
|
| 12 |
+
[Paper](https://huggingface.co/papers/2603.07832) | [Code](https://github.com/gazeshift3/gazeshift)
|
| 13 |
+
|
| 14 |
+
VRGaze is the first large-scale off-axis gaze estimation dataset for Virtual Reality (VR), introduced in the paper "GazeShift: Unsupervised Gaze Estimation and Dataset for VR".
|
| 15 |
+
|
| 16 |
+
## Dataset Summary
|
| 17 |
+
|
| 18 |
+
The dataset comprises **2.1 million near-eye infrared images** collected from 68 participants. It is specifically designed to address data scarcity in VR gaze research, focusing on the off-axis camera configurations typical of modern headsets.
|
| 19 |
+
|
| 20 |
+
- **Images:** 2.1 million infrared images.
|
| 21 |
+
- **Participants:** 68 individuals.
|
| 22 |
+
- **Hardware:** Off-axis camera configurations common in modern VR systems.
|
| 23 |
+
- **Purpose:** Designed for unsupervised gaze representation learning and few-shot calibration.
|
| 24 |
+
|
| 25 |
+
## Dataset Sample
|
| 26 |
|
| 27 |
VRGaze dataset sample:
|
| 28 |
|
| 29 |
+

|
| 30 |
+
|
| 31 |
+
## Usage
|
| 32 |
+
|
| 33 |
+
To use this dataset with the official GazeShift implementation, follow these steps:
|
| 34 |
+
|
| 35 |
+
### Installation
|
| 36 |
+
|
| 37 |
+
```bash
|
| 38 |
+
git clone https://github.com/gazeshift3/gazeshift
|
| 39 |
+
cd gazeshift
|
| 40 |
+
pip install -r requirements.txt
|
| 41 |
+
```
|
| 42 |
+
|
| 43 |
+
### Training
|
| 44 |
+
|
| 45 |
+
To reproduce the experiments on the VRGaze dataset, run the provided training script (ensure you update the dataset and output locations within the script):
|
| 46 |
+
|
| 47 |
+
```bash
|
| 48 |
+
bash Train.sh
|
| 49 |
+
```
|
| 50 |
+
|
| 51 |
+
The model is expected to achieve a mean angular error of approximately 1.84° after per-person calibration (around 400K steps).
|