
venkatsubra/fossa-vitb
Depth Estimation • Updated
Error code: StreamingRowsError
Exception: UnidentifiedImageError
Message: cannot identify image file <_io.BytesIO object at 0x7f23aba0be20>
Traceback: Traceback (most recent call last):
File "/src/services/worker/src/worker/utils.py", line 99, in get_rows_or_raise
return get_rows(
^^^^^^^^^
File "/src/libs/libcommon/src/libcommon/utils.py", line 272, in decorator
return func(*args, **kwargs)
^^^^^^^^^^^^^^^^^^^^^
File "/src/services/worker/src/worker/utils.py", line 77, in get_rows
rows_plus_one = list(itertools.islice(ds, rows_max_number + 1))
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/iterable_dataset.py", line 2690, in __iter__
for key, example in ex_iterable:
^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/iterable_dataset.py", line 2240, in __iter__
example = _apply_feature_types_on_example(
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/iterable_dataset.py", line 2159, in _apply_feature_types_on_example
decoded_example = features.decode_example(encoded_example, token_per_repo_id=token_per_repo_id)
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/features/features.py", line 2204, in decode_example
column_name: decode_nested_example(feature, value, token_per_repo_id=token_per_repo_id)
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/features/features.py", line 1508, in decode_nested_example
return schema.decode_example(obj, token_per_repo_id=token_per_repo_id) if obj is not None else None
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/datasets/features/image.py", line 190, in decode_example
image = PIL.Image.open(bytes_)
^^^^^^^^^^^^^^^^^^^^^^
File "/usr/local/lib/python3.12/site-packages/PIL/Image.py", line 3498, in open
raise UnidentifiedImageError(msg)
PIL.UnidentifiedImageError: cannot identify image file <_io.BytesIO object at 0x7f23aba0be20>Need help to make the dataset viewer work? Make sure to review how to configure the dataset viewer, and open a discussion for direct support.
The official implementation is available on GitHub.
Yiming Zuo* · Hongyu Wen* · Venkat Subramanian* · Patrick Chen · Karhan Kayan · Mario Bijelic · Felix Heide · Jia Deng
(*Equal Contribution)
Princeton Vision & Learning Lab (PVL)
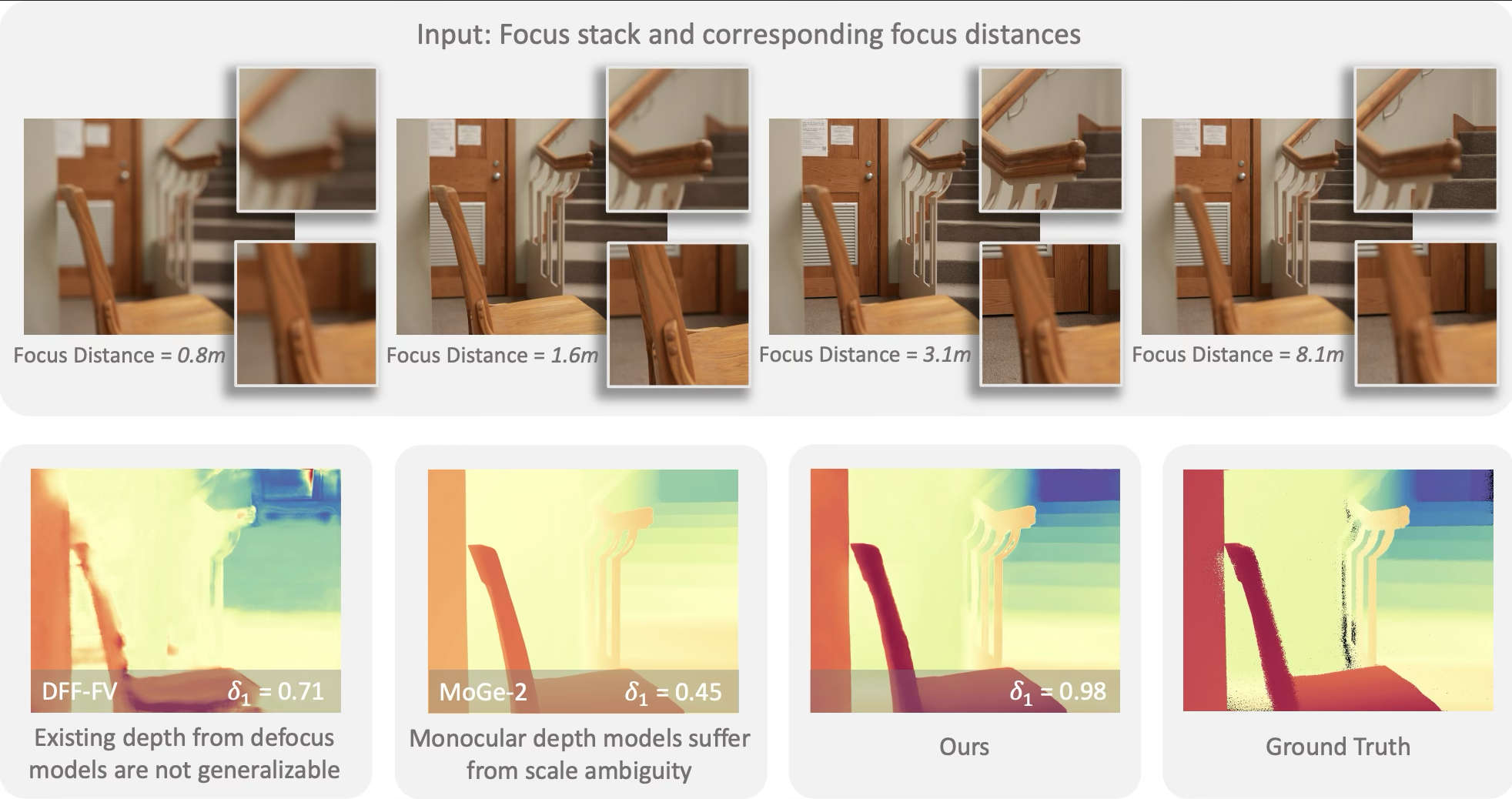
Depth from Defocus (DfD) is the task of estimating a dense metric depth map from a focus stack. Unlike previous works overfitting to a certain dataset, this paper focuses on the challenging and practical setting of zero-shot generalization.
We first propose a new real-world DfD benchmark ZEDD (released under CC BY 4.0), which contains 8.3x more scenes and significantly higher quality images and ground-truth depth maps compared to previous benchmarks. We also build the Infinigen Defocus synthetic dataset on top of Infinigen Indoors. Infinigen is a procedural system for generating photorealistic indoor scenes.
Infinigen uses Blender for scene composition and rendering. Blender provides native support for camera aperture and focus distance, and supports synthesizing defocus effects during ray tracing using a thin-lens camera model. This makes Blender suitable for generating realistic focus stacks with physically accurate defocus blur.
We modify the Infinigen generation pipeline so that, for each scene, it renders multiple images from the same camera pose while varying the aperture size and focus distance. Specifically, we render images using 5 aperture settings (F1.4/2.0/2.8/4.0/5.6), 9 focus distances (0.8/1.2/1.7/2.3/3.0/3.8/4.7/6.0/8.0m), and one additional all-in-focus image, resulting in 5 × 9 + 1 = 46 images per scene.
We use the rendered depth map of the all-in-focus image as the ground-truth depth. In total, we generate 500 scenes and manually reject the scenes with degenerated object layout or suboptimal camera placement, resulting in 200 scenes with the highest visual quality.

@article{ZeroShotDepthFromDefocus,
author = {Zuo, Yiming and Wen, Hongyu and Subramanian, Venkat and Chen, Patrick and Kayan, Karhan and Bijelic, Mario and Heide, Felix and Deng, Jia},
title = {Zero-Shot Depth from Defocus},
journal = {arXiv preprint arXiv:2603.26658},
year = {2026},
url = {https://arxiv.org/abs/2603.26658}
}