


🧠 MIDAS-PYTORCH
Real-Time Monocular Depth Estimation using PyTorch & OpenCV
This project demonstrates real-time depth estimation from a single RGB camera using the MiDaS deep learning model. It shows how depth can be inferred without stereo cameras or LiDAR, using only computer vision and deep learning.
📂 Folder Structure
MIDAS-PYTORCH/
│── app.py
│── requirements.txt
│── README.md
📖 What is Depth Estimation?
Depth estimation is the task of determining how far objects are from a camera.
Traditional approaches use:
- Stereo cameras
- LiDAR sensors
- RGB-D cameras
This project uses monocular depth estimation, meaning:
Depth is predicted from a single RGB image.
🤖 What is MiDaS?
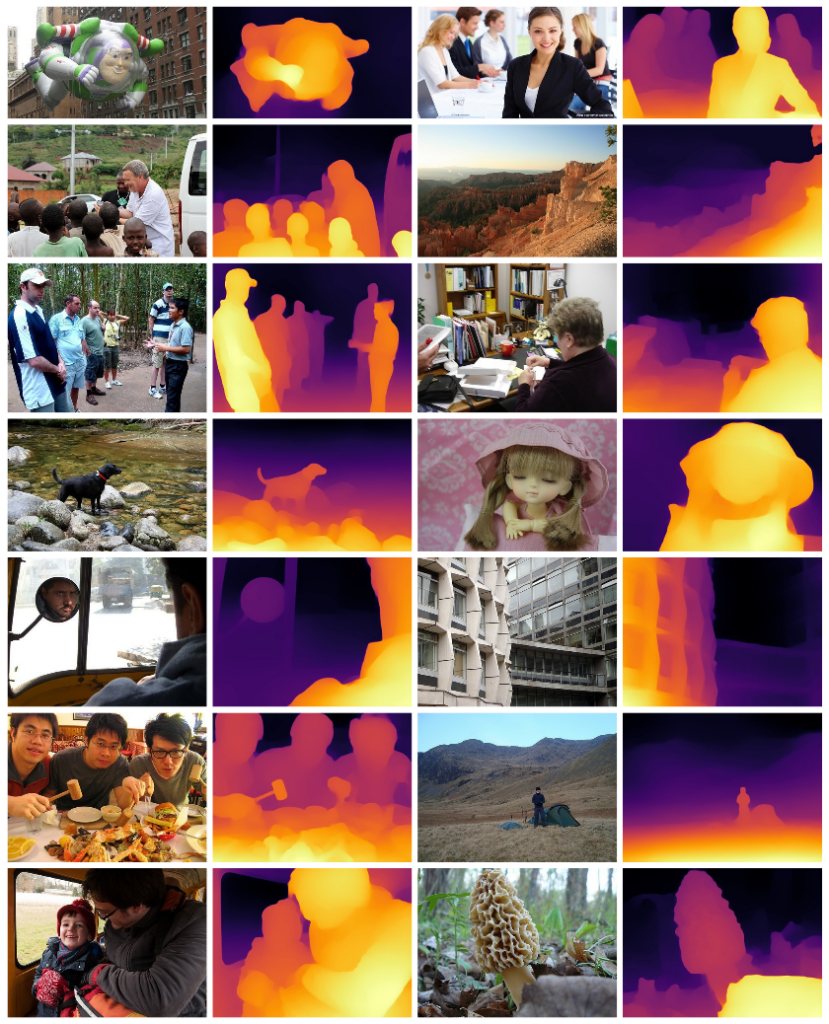
MiDaS (Mixed Datasets for Monocular Depth Estimation) is a pretrained deep learning model that predicts a depth map from one image.
- Input: RGB image
- Output: Depth map
- Bright pixels: Closer objects
- Dark pixels: Farther objects
MiDaS works well because it is trained on multiple diverse datasets.
⚠️ Relative vs Absolute Depth (Important)
❌ MiDaS does NOT give:
- Exact distance in meters
- Physical measurements
✅ MiDaS DOES give:
- Relative depth ordering
- Scene geometry understanding
Example:
Person > Chair > Wall
✨ Project Features
- Real-time webcam depth estimation
- Lightweight MiDaS_small model
- OpenCV-based visualization
- CPU compatible (GPU optional)
- Beginner-friendly implementation
🛠️ Tech Stack
- Python
- PyTorch
- OpenCV
- NumPy
- MiDaS (Intel-ISL)
⚙️ Installation
1️⃣ Clone the repository
git clone <repository-url>
cd MIDAS-PYTORCH
2️⃣ Install dependencies
pip install -r requirements.txt
Recommended Python version: 3.10+
🧩 How the System Works
High-level pipeline:
Webcam Frame
↓
BGR → RGB Conversion
↓
MiDaS Image Transform
↓
Neural Network Inference
↓
Depth Prediction
↓
Interpolation (Resize)
↓
Normalization
↓
Color-Mapped Depth Output
▶️ Running the Application
python app.py
- Press Q to quit.
🖼️ Output Explanation
Two windows are displayed:
- Original Webcam Feed
- Depth Map Visualization
Color meaning:
- 🔴 / Yellow → closer objects
- 🔵 / Dark → farther objects
Depth values are relative, not real-world distances.
🧠 Model Used
| Model | Description |
|---|---|
| MiDaS_small | Fast, lightweight, suitable for real-time webcam inference |
🚀 Performance Notes
- Runs smoothly on CPU
- FPS can be improved by lowering webcam resolution
- GPU acceleration supported if CUDA is available
- OpenCV used for fast real-time visualization
❌ Limitations
- No metric (meter-level) depth
- Struggles with reflective or transparent surfaces
- Relative depth only
🌍 Applications
- Robotics obstacle avoidance
- AR / VR scene understanding
- Autonomous driving research
- 3D scene reconstruction
- Computer vision learning projects
🔮 Future Improvements
- Combine MiDaS with object detection (YOLO)
- Approximate real-world distance estimation
- Web deployment using Streamlit or FastAPI
- Depth-based segmentation
🎯 Interview One-Liner
“This project performs real-time monocular depth estimation from a single RGB webcam feed using the MiDaS deep learning model with PyTorch and OpenCV.”
⭐ If this project helps you, consider starring the repository!