

license: apache-2.0
library_name: transformers
pipeline_tag: image-feature-extraction
OneVision-Encoder-Large
[Paper] [Project Page] [GitHub]
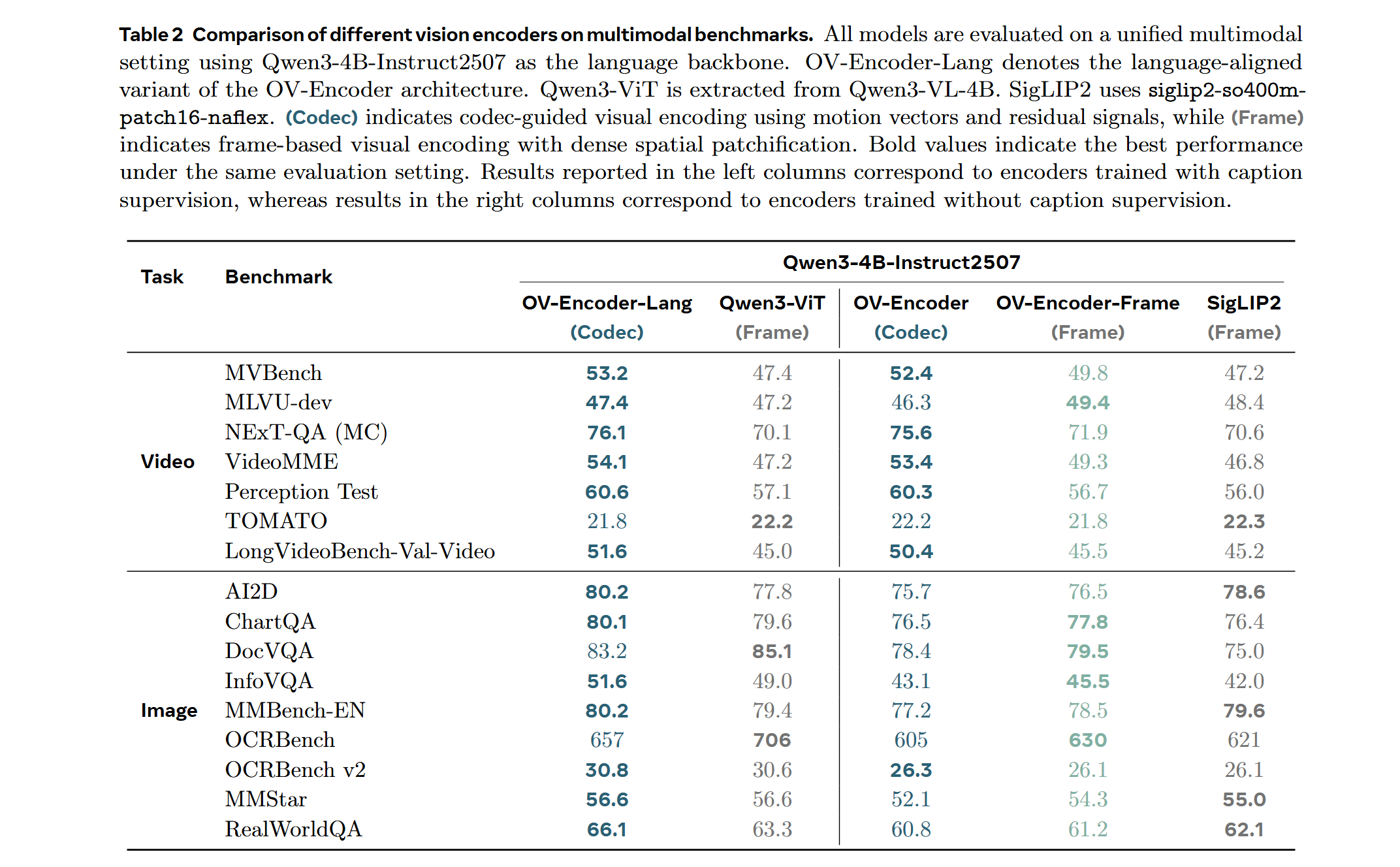
OneVision-Encoder is a vision foundation model that introduces Codec-Aligned Sparsity as a foundational principle for multimodal intelligence. By adopting Codec Patchification, the model focuses computation exclusively on the regions rich in signal entropy, achieving high efficiency and accuracy across image, video, and document understanding tasks.
Key Features
- Codec-Style Patch Selection: Instead of sampling sparse frames densely (all patches from few frames), OneVision Encoder samples dense frames sparsely (important patches from many frames).
- 3D Rotary Position Embedding: Uses a 4:6:6 split for temporal, height, and width dimensions to capture spatiotemporal relationships.
- Unified Vision Foundation: A single base model for consistent understanding of images, videos, and OCR.
Downstream Tasks
- Video benchmarks: MVBench, VideoMME, Perception Test
- Image understanding: DocVQA, ChartQA, OCRBench
- Action recognition: SSv2, UCF101, Kinetics
Quick Start
Transformers Version Compatibility:
- ✅
transformers==4.57.3(Recommended): Works withAutoModel.from_pretrained()- ⚠️
transformers>=5.0.0: Not currently supported. We are actively working on a fix.
Note: This model supports native resolution input. For optimal performance:
- Image: 448×448 resolution (pre-trained)
- Video: 224×224 resolution with 256 tokens per frame (pre-trained)
from transformers import AutoModel, AutoImageProcessor
from PIL import Image
import torch
# Load model and preprocessor
model = AutoModel.from_pretrained(
"lmms-lab-encoder/onevision-encoder-large",
trust_remote_code=True,
attn_implementation="flash_attention_2"
).to("cuda").eval()
preprocessor = AutoImageProcessor.from_pretrained(
"lmms-lab-encoder/onevision-encoder-large",
trust_remote_code=True
)
# Image inference: [B, C, H, W]
image = Image.open("path/to/your/image.jpg") # Replace with your image path
pixel_values = preprocessor(images=image, return_tensors="pt")["pixel_values"].to("cuda")
with torch.no_grad():
outputs = model(pixel_values)
# outputs.last_hidden_state: [B, num_patches, hidden_size]
# outputs.pooler_output: [B, hidden_size]
# Video inference: [B, C, T, H, W] with patch_positions
num_frames, target_frames = 16, 64
patch_size = 14
# Load video frames and preprocess each frame (replace with your video frame paths)
frames = [Image.open(f"path/to/frame_{i}.jpg") for i in range(num_frames)]
video_pixel_values = preprocessor(images=frames, return_tensors="pt")["pixel_values"]
# Reshape from [T, C, H, W] to [B, C, T, H, W]
video = video_pixel_values.unsqueeze(0).permute(0, 2, 1, 3, 4).to("cuda")
# Build patch_positions for temporal sampling: [B, num_frames * frame_tokens, 3]
frame_pos = torch.linspace(0, target_frames - 1, num_frames).long().cuda() # [T]
grid_h, grid_w = video.shape[-2] // patch_size, video.shape[-1] // patch_size # patch grid
frame_tokens = grid_h * grid_w
t_positions = frame_pos[:, None].repeat(1, frame_tokens).reshape(-1) # [T * frame_tokens]
h_positions = torch.arange(grid_h, device="cuda").repeat_interleave(grid_w)
h_positions = h_positions.repeat(num_frames) # [T * frame_tokens]
w_positions = torch.arange(grid_w, device="cuda").repeat(grid_h)
w_positions = w_positions.repeat(num_frames) # [T * frame_tokens]
patch_positions = torch.stack([t_positions, h_positions, w_positions], dim=-1).unsqueeze(0)
# patch_positions example (256 tokens per frame, 16x16 patch grid):
# Each row is [t, h, w].
# First 4 patches of frame 0 (t=0):
# patch_positions[0, 0:4, :] -> [[0, 0, 0], [0, 0, 1], [0, 0, 2], [0, 0, 3]]
# First 4 patches of frame 1 (t=4):
# patch_positions[0, 256:260, :] -> [[4, 0, 0], [4, 0, 1], [4, 0, 2], [4, 0, 3]]
with torch.no_grad():
outputs = model(video, patch_positions=patch_positions)
Loading from Source Code
git clone https://github.com/EvolvingLMMs-Lab/OneVision-Encoder.git
cd OneVision-Encoder
pip install -e .
from onevision_encoder import OneVisionEncoderModel, OneVisionEncoderConfig
from transformers import AutoImageProcessor
model = OneVisionEncoderModel.from_pretrained(
"lmms-lab-encoder/onevision-encoder-large",
trust_remote_code=True,
attn_implementation="flash_attention_2"
).to("cuda").eval()
preprocessor = AutoImageProcessor.from_pretrained(
"lmms-lab-encoder/onevision-encoder-large",
trust_remote_code=True
)
LMM Probe Results
Training on a mixed dataset of 740K samples from LLaVA-OneVision and 800K samples from LLaVA-Video SFT. The training pipeline proceeds directly to Stage 2 fine-tuning. We adopt a streamlined native-resolution strategy inspired by LLaVA-OneVision: when the input frame resolution matches the model's native input size, it is fed directly—without tiling or cropping—to evaluate the ViT's native resolution capability.
Model Card Summary
| Property | Value |
|---|---|
| Model Type | Vision Transformer (ViT) |
| Architecture | HEVC-Style Vision Transformer |
| Hidden Size | 1024 |
| Intermediate Size | 4096 |
| Number of Layers | 24 |
| Number of Attention Heads | 16 |
| Patch Size | 14 |
| Image Resolution | 448×448 (pre-trained) |
| Video Resolution | 224×224 with 256 tokens per frame |
| Positional Encoding | 3D RoPE (4:6:6 split for T:H:W) |
| Normalization | Layer Normalization |
| Activation Function | GELU |
| License | Apache 2.0 |
Citation
@article{tang2026onevision_encoder,
title = {{OneVision-Encoder}: Codec-Aligned Sparsity as a Foundational Principle for Multimodal Intelligence},
author = {Tang, Feilong and An, Xiang and Yan, Yunyao and Xie, Yin and Qin, Bin and Yang, Kaicheng and Shen, Yifei and Zhang, Yuanhan and Li, Chunyuan and Feng, Shikun and Chen, Changrui and Tan, Huajie and Hu, Ming and Zhang, Manyuan and Bo Li and Ziyong Feng and Ziwei Liu and Zongyuan Ge and Jiankang Deng},
journal = {arXiv:2602.08683},
year = {2026},
url = {https://arxiv.org/abs/2602.08683}
}