
DeltaDorsal: Enhancing Hand Pose Estimation with Dorsal Features in Egocentric Views
Paper • 2601.15516 • Published
Model repository for the paper: DeltaDorsal: Enhancing Hand Pose Estimation with Dorsal Features in Egocentric Views published at ACM CHI 2026
[Github] [DOI (UNDER CONSTRUCTION)] [arXiv]
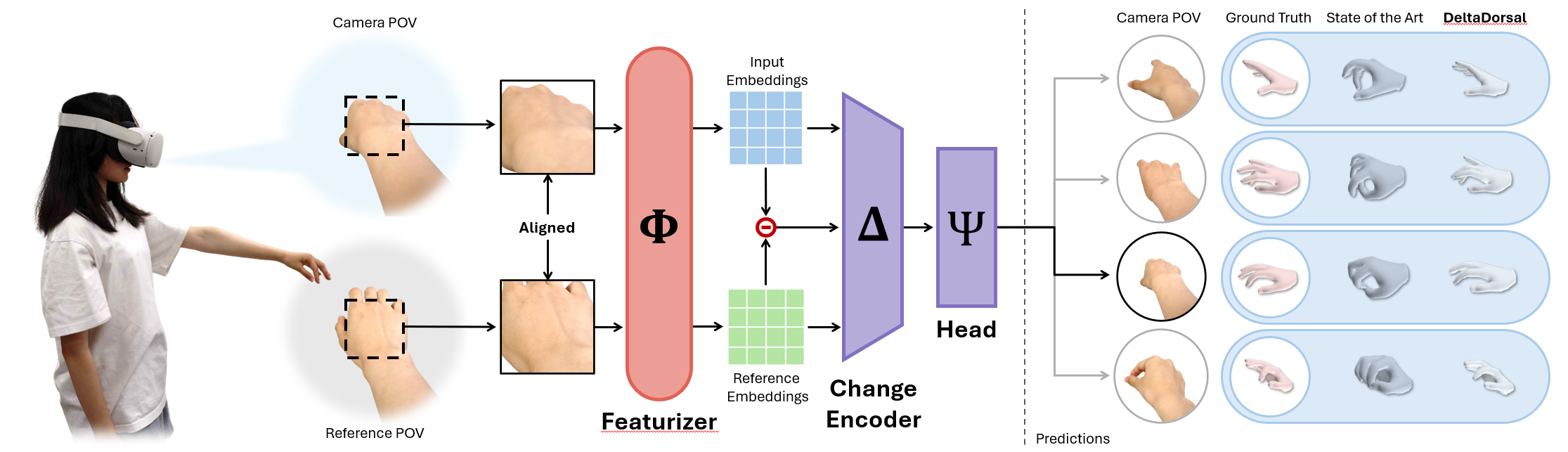
DeltaDorsal is a 3D hand pose estimation model using dorsal features of the hand. DeltaDorsal uses a delta encoding approach where features from a base (neutral) hand image are compared with features from the current hand image to predict 3D hand pose and force. Our repo consists of the following components:
git clone --recursive [REPO_URL]
cd wrinklesense
uv pip install torch --torch-backend=auto
uv sync
Make sure to follow all the installation instructions for DINOv3 found here.
Download all model weights and place them into _DATA/dinov3
Our repo requires the usage of the MANO hand model. Request access here.
You only need to put MANO_RIGHT.pkl under the _DATA/mano folder.
wandb login
DeltaDorsal uses Hydra for configuration management. Config files are located in configs/:
You can override any config parameter via command line:
python src/train_pose.py model.optimizer.lr=0.0001 data.batch_size=32 max_epochs=100
Or create a new config file in configs/experiments/ and reference it:
python src/train_pose.py experiment=my_experiment
Train the pose estimation model:
python src/train_pose.py
Override config parameters via command line:
# Change number of epochs
python src/train_pose.py max_epochs=50
# Change batch size
python src/train_pose.py data.batch_size=32
# Change learning rate
python src/train_pose.py model.optimizer.lr=1e-4
# Resume from checkpoint
python src/train_pose.py ckpt_path=path/to/checkpoint.ckpt
# Train only (skip testing)
python src/train_pose.py test=False
# Test only (skip training)
python src/train_pose.py train=False test=True ckpt_path=path/to/checkpoint.ckpt
# Use leave-one-out cross-validation
python src/train_pose.py data.leave_one_out=True data.val_participants=[1] data.test_participants=[3]
# Train on specific participants
python src/train_pose.py data.all_participant_ids=[1,2,3,4,5]
Train the force estimation model:
python src/train_force.py
# Change number of epochs
python src/train_force.py max_epochs=50
# Change batch size
python src/train_force.py data.batch_size=64
# Resume from checkpoint
python src/train_force.py ckpt_path=path/to/checkpoint.ckpt
# Train only
python src/train_force.py test=False
# Test only
python src/train_force.py train=False test=True ckpt_path=path/to/checkpoint.ckpt
After training, evaluate on the test set:
# Pose model evaluation
python src/train_pose.py train=False test=True ckpt_path=path/to/checkpoint.ckpt
# Force model evaluation
python src/train_force.py train=False test=True ckpt_path=path/to/checkpoint.ckpt
If extending or using our work, please cite the following papers:
@misc{huangDeltaDorsalEnhancingHand2026,
title = {{{DeltaDorsal}}: {{Enhancing Hand Pose Estimation}} with {{Dorsal Features}} in {{Egocentric Views}}},
shorttitle = {{{DeltaDorsal}}},
author = {Huang, William and Pei, Siyou and Zou, Leyi and Gonzalez, Eric J. and Chatterjee, Ishan and Zhang, Yang},
year = 2026,
month = jan,
number = {arXiv:2601.15516},
eprint = {2601.15516},
primaryclass = {cs},
publisher = {arXiv},
doi = {10.48550/arXiv.2601.15516},
urldate = {2026-02-08},
archiveprefix = {arXiv}
}
@article{MANO:SIGGRAPHASIA:2017,
title = {Embodied Hands: Modeling and Capturing Hands and Bodies Together},
author = {Romero, Javier and Tzionas, Dimitrios and Black, Michael J.},
journal = {ACM Transactions on Graphics, (Proc. SIGGRAPH Asia)},
publisher = {ACM},
month = nov,
year = {2017},
url = {http://doi.acm.org/10.1145/3130800.3130883},
month_numeric = {11}
}
@misc{simeoniDINOv32025,
title = {{{DINOv3}}},
author = {Sim{\'e}oni, Oriane and Vo, Huy V. and Seitzer, Maximilian and Baldassarre, Federico and Oquab, Maxime and Jose, Cijo and Khalidov, Vasil and Szafraniec, Marc and Yi, Seungeun and Ramamonjisoa, Micha{\"e}l and Massa, Francisco and Haziza, Daniel and Wehrstedt, Luca and Wang, Jianyuan and Darcet, Timoth{\'e}e and Moutakanni, Th{\'e}o and Sentana, Leonel and Roberts, Claire and Vedaldi, Andrea and Tolan, Jamie and Brandt, John and Couprie, Camille and Mairal, Julien and J{\'e}gou, Herv{\'e} and Labatut, Patrick and Bojanowski, Piotr},
year = 2025,
month = aug,
number = {arXiv:2508.10104},
eprint = {2508.10104},
primaryclass = {cs},
publisher = {arXiv},
doi = {10.48550/arXiv.2508.10104},
urldate = {2025-08-25},
archiveprefix = {arXiv}
}