
NSER-IBVS Suite
Collection
A self-supervised neuro-analytical framework for vision-based quadrotor control. Contains paper, models and spaces. • 7 items • Updated • 3
ICCV 2025 Workshops - Oral Presentation
Sebastian Mocanu · Sebastian-Ion Nae · Mihai-Eugen Barbu · Marius Leordeanu
This repository contains pre-trained models for NSER-IBVS (Numerically Stable Efficient Reduced Image-Based Visual Servoing), a self-supervised framework for vision-based quadrotor control.
The system uses a teacher-student architecture where a compact 1.7M parameter student network learns to control a drone by imitating an analytical IBVS teacher, achieving 11x faster inference (540 FPS vs 48 FPS) while maintaining comparable accuracy.
Trajectories teacher vs student from two starting points:
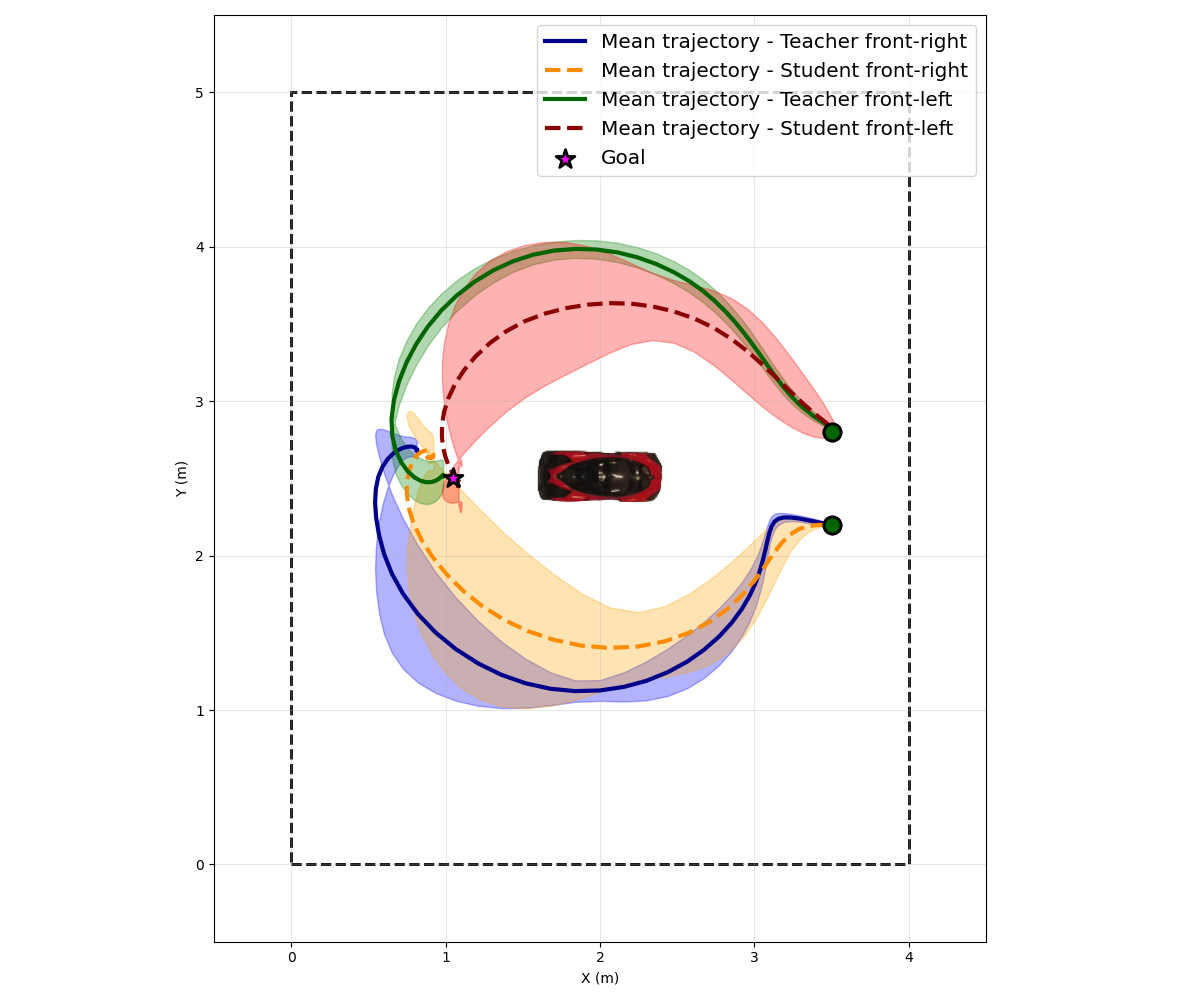 Front View Trajectories |
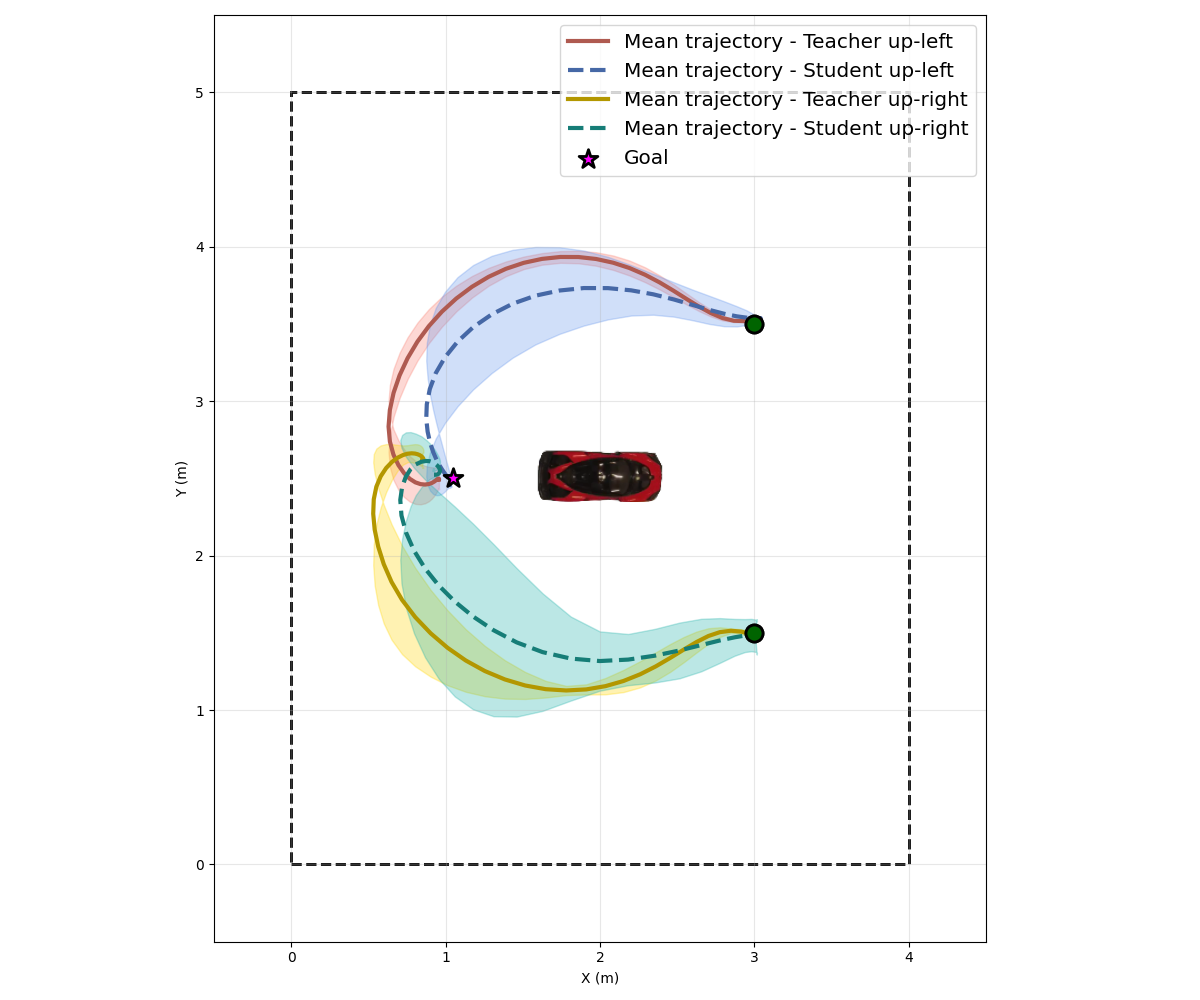 Up View Trajectories |
| Model | File | Parameters | Description |
|---|---|---|---|
| YOLOv11 Segmentation (sim) | 29_05_best__yolo11n-seg_sim_car_bunker__all.pt |
2.84M | Vehicle segmentation for simulator |
| YOLOv11 Segmentation (real) | real-yolo-car-full-segmentation.pt |
2.84M | Vehicle segmentation for real-world |
| Mask Splitter (sim) | mask_splitter-epoch_10-dropout_0-low_x2-and-high_x0_quality_early_stop.pt |
1.94M | Anterior-posterior mask splitting (simulator) |
| Mask Splitter (real) | mask_splitter-epoch_10-dropout_0-_x2_real_early_stop.pt |
1.94M | Anterior-posterior mask splitting (real-world) |
| Model | File | Parameters | Description |
|---|---|---|---|
| Student (sim→real) | student_model_sim_on_real_world_distribution.pth |
1.7M | Trained on sim, normalized for real-world |
| Student (fine-tuned) | student_real_pretrained_augX3_80_runs.pth |
1.7M | Fine-tuned on real-world data |
git clone --recursive https://github.com/SpaceTime-Vision-Robotics-Laboratory/nser-ibvs-drone.git
cd nser-ibvs-drone
python3 -m venv ./venv
source venv/bin/activate
python -m pip install --upgrade pip
python -m pip install -r requirements.txt
python -m pip install -e .
Run Tests to verify imports and functionality:
python -m unittest discover ./tests
from mask_splitter.yolo_model import YoloSegmentation
# Initialize YOLO model
yolo = YoloSegmentation(
model_path="real-yolo-car-full-segmentation.pt",
confidence_threshold=0.7
)
# Segment an image
annotated_frame, binary_mask = yolo.segment_image(frame)
# Get detection info
results = yolo.detect(frame)
target = yolo.find_best_target_box(results)
print(f"Confidence: {target.confidence}, Center: {target.center}")
import cv2
from mask_splitter.nn.infer import MaskSplitterInference
# Initialize the model
splitter = MaskSplitterInference(
model_path="mask_splitter-epoch_10-dropout_0-_x2_real_early_stop.pt",
device="cuda",
image_size=(360, 640),
confidence_threshold=0.5
)
# Load image and mask
image = cv2.imread("frame-path.png")
mask = cv2.imread("mask-path.png", cv2.IMREAD_GRAYSCALE)
# Run inference
front_mask, back_mask = splitter.infer(image, mask)
# Visualize results
splitter.visualize(image, front_mask, back_mask)
Direct usage:
import torch
from nser_ibvs_drone.distiled_network.drone_command_regressor import DroneCommandRegressor
# Load model
model = DroneCommandRegressor()
model.load_model("student_model_sim_on_real_world_distribution.pth")
model.eval()
# Input: RGB image tensor [B, 3, H, W]
# Output: velocity commands [vx, vy, vyaw]
Or with Student Engine:
import cv2
from nser_ibvs_drone.distiled_network.distil_engine import StudentEngine
student_model_path = "student_model_sim_on_real_world_distribution.pth"
model_engine = StudentEngine(student_model_path)
frame = cv2.imread("frame-path.png")
commands = model_engine.predict(frame)
For complete inference pipelines and running on algorithms on drones, see the docs in GitHub repository.
| Metric | Teacher (NSER-IBVS) | Student Network |
|---|---|---|
| Inference Speed | 48.3 FPS | 540.8 FPS |
| Parameters | 4.78M | 1.7M |
| Mean Error (Sim) | 29.76 px | 14.26 px |
| IoU (Sim) | 0.522 | 0.752 |
| Mean Error (Real) | 29.96 px | 33.33 px |
| IoU (Real) | 0.627 | 0.591 |
Control commands and error evolutions over time:
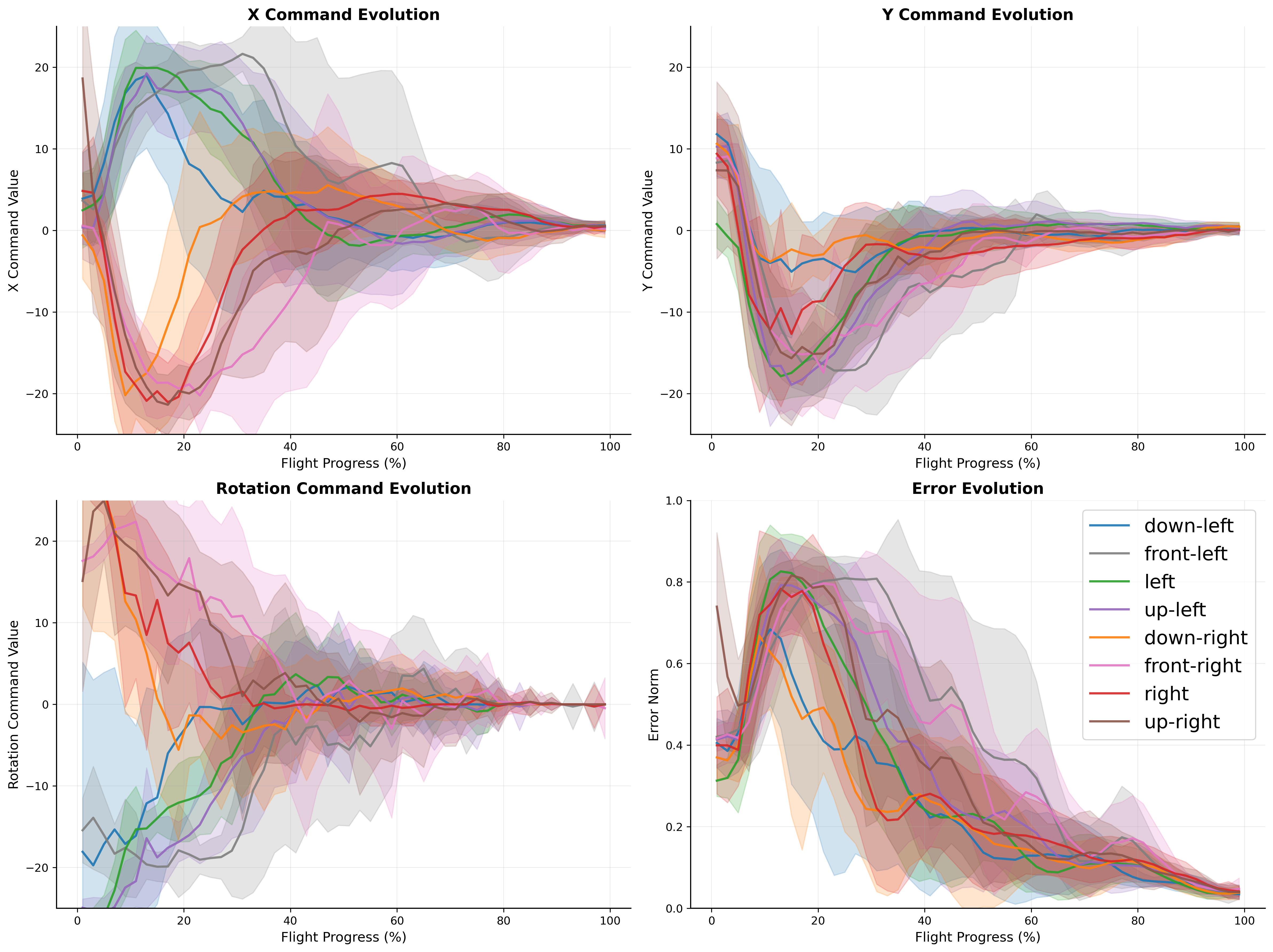 Real-World Flight - Teacher (IBVS) |
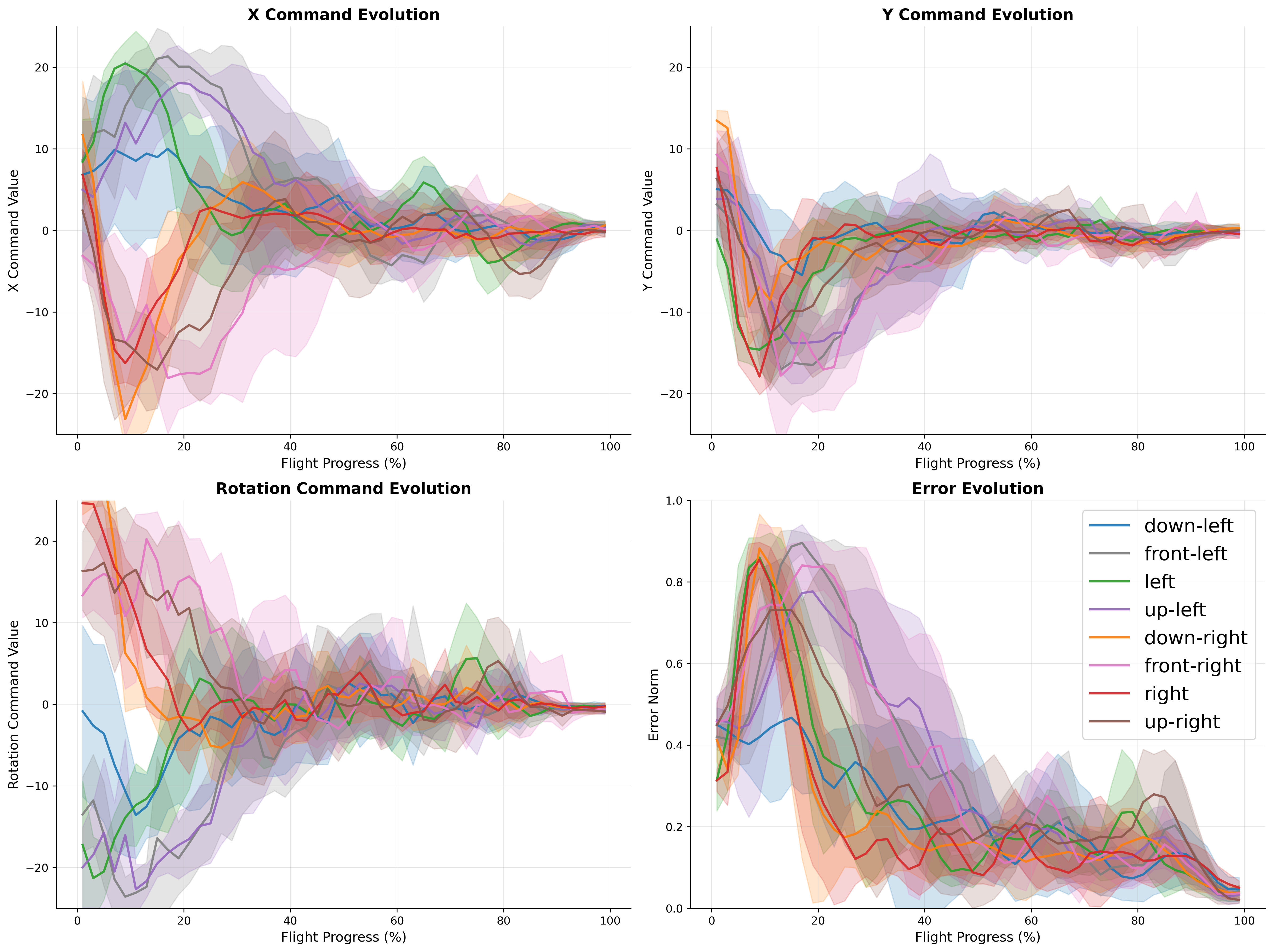 Real-World Flight - Student |
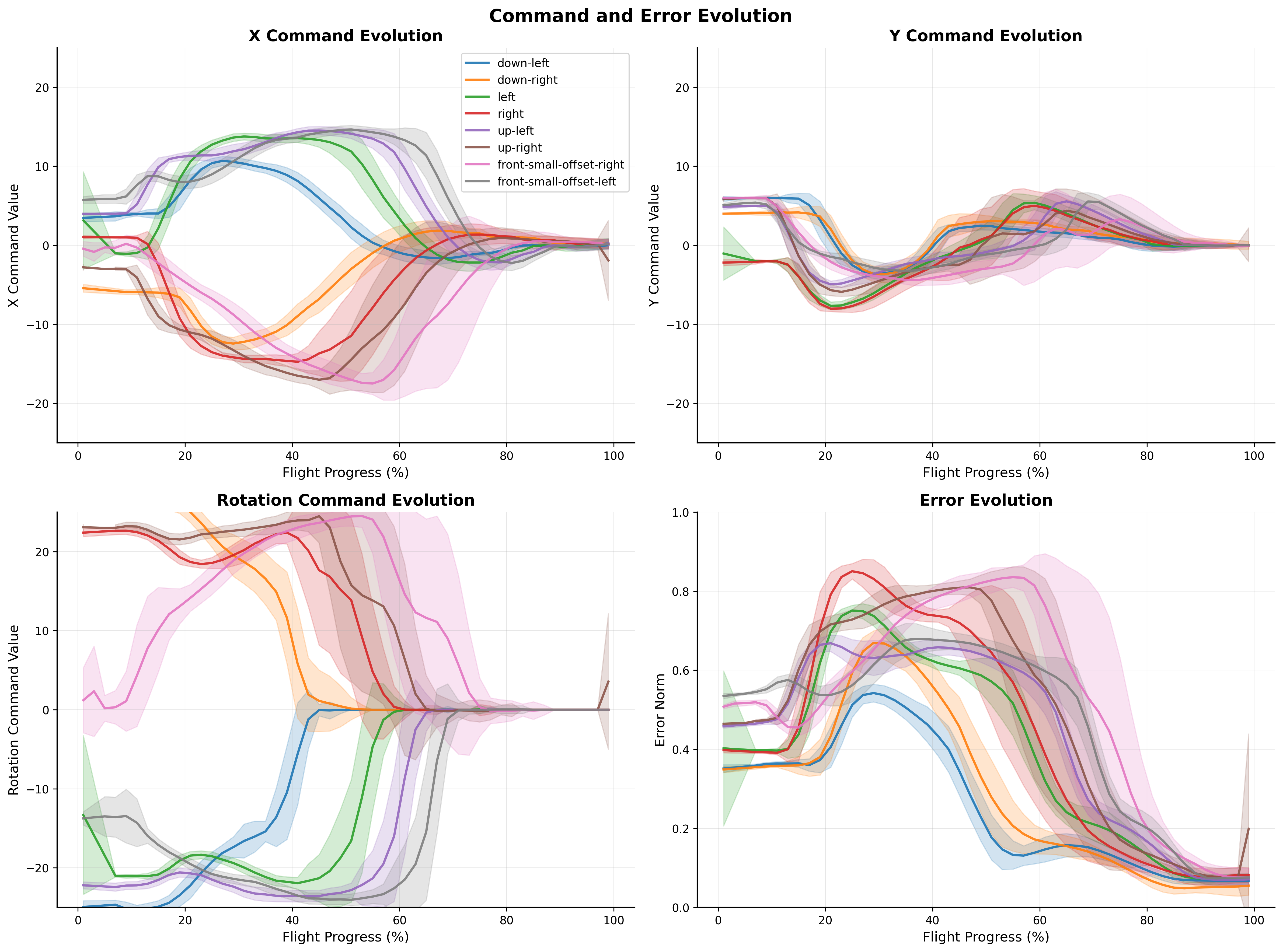 Digital-Twin Flight - Teacher (IBVS) |
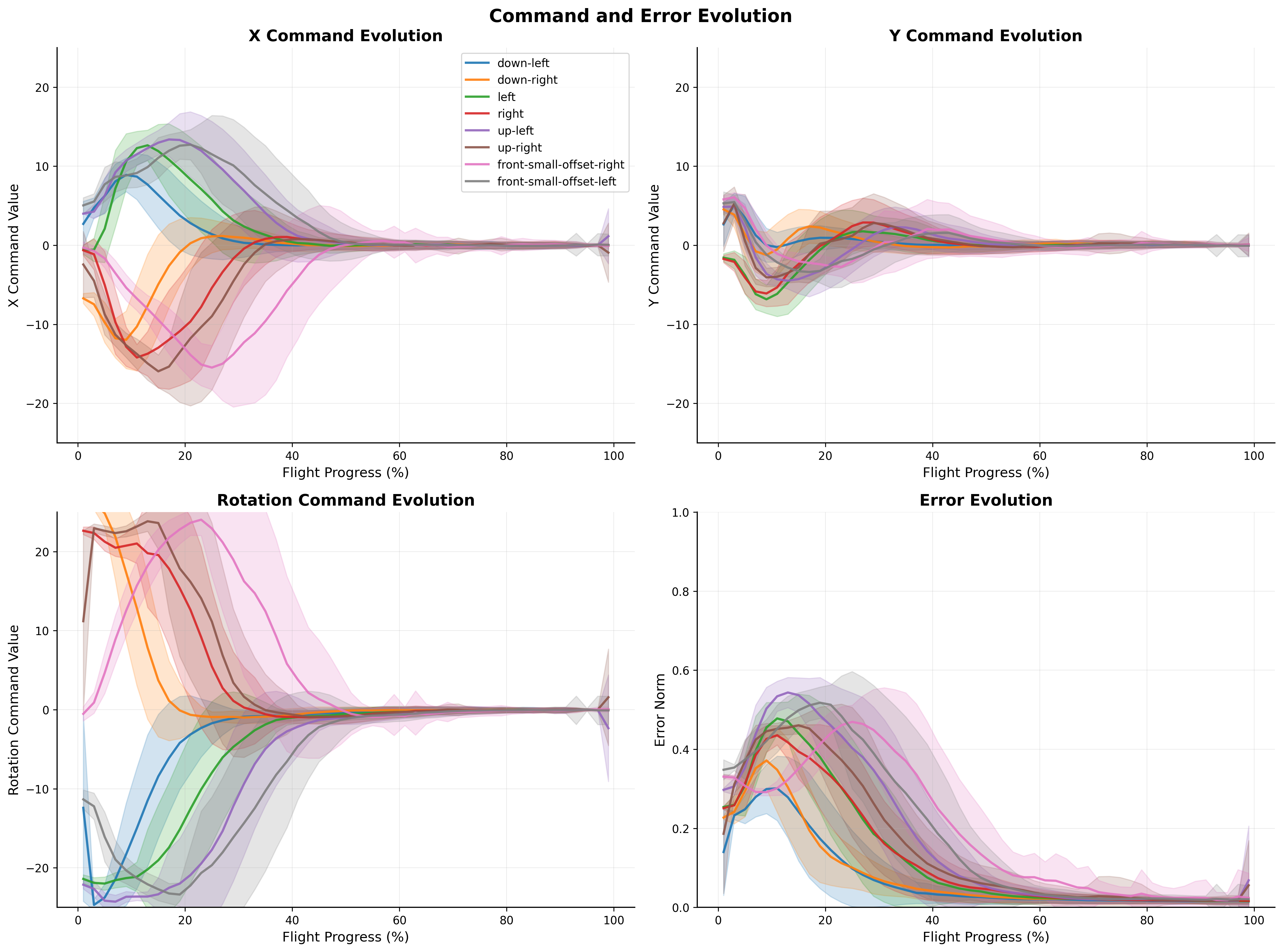 Digital-Twin Flight - Student |
Training data and the custom UE4 simulator environment are available:
@InProceedings{Mocanu_2025_ICCV,
author = {Mocanu, Sebastian and Nae, Sebastian-Ion and Barbu, Mihai-Eugen and Leordeanu, Marius},
title = {Efficient Self-Supervised Neuro-Analytic Visual Servoing for Real-time Quadrotor Control},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops},
month = {October},
year = {2025},
pages = {1744-1753}
}
| Resource | Link |
|---|---|
| Paper | ICCV 2025 Open Access |
| arXiv | 2507.19878 |
| Code | GitHub |
| Website | Project Page |
| Poster |