
| # Pixel-aligned RGB-NIR Stereo Imaging and Dataset for Robot Vision | |
| > **CVPR 2025** | |
| > **Jinnyeong Kim**, **Seung-Hwan Baek** | |
| > POSTECH | |
| > [[arXiv]](https://arxiv.org/abs/2411.18025) • [[Code]](https://github.com/your-repo-url) • [[Video]](https://your-video-link.com) • [[Dataset on HuggingFace]](https://huggingface.co/datasets/your-dataset-url) | |
| --- | |
| ## Overview | |
| This repository provides the code and dataset accompanying our CVPR 2025 paper: | |
| **"Pixel-aligned RGB-NIR Stereo Imaging and Dataset for Robot Vision"** | |
| We propose a novel robotic vision system equipped with **two pixel-aligned RGB-NIR stereo cameras** and a **LiDAR sensor** mounted on a mobile robot. Our system captures **RGB-NIR stereo video sequences** and **temporally synchronized LiDAR point clouds**, offering a high-quality, aligned multi-spectral dataset under diverse lighting conditions. | |
|  | |
| --- | |
| ## ✨ Highlights | |
| - **Pixel-aligned RGB-NIR stereo imaging** for robust vision under challenging lighting. | |
| - **Continuous video sequences** recorded using a mobile robot. | |
| - **Sparse LiDAR point clouds** temporally synchronized with stereo imagery. | |
| - Two proposed methods to utilize RGB-NIR pairs: | |
| - RGB-NIR **Image Fusion** (pretrained model-compatible) | |
| - RGB-NIR **Feature Fusion** (for fine-tuned stereo depth estimation) | |
| --- | |
| ## 📦 Dataset | |
| We release a large-scale dataset for training and evaluating robot vision models in realistic environments. | |
| ### 📹 Data Statistics | |
| | | #Videos | #Frames | | |
| |---|--------|---------| | |
| | Training | 80 | 90,000 | | |
| | Testing | 40 | 7,000 | | |
| ### 📁 Per Frame Data Includes: | |
| - Pixel-aligned **RGB-NIR stereo images** | |
| - **Sparse LiDAR** point cloud (in camera coordinates) | |
| - **Sensor timestamps** (synchronized) | |
| ### 🌗 Lighting Scenarios | |
| <img width="920" alt="image" src="https://github.com/user-attachments/assets/a07bea4e-5674-4277-a585-f556ce9d4825" /> | |
| ➡️ **[Code is availabe on github](https://github.com/divisonofficer/Pixel_aligned_RGB_NIR_Stereo)** | |
| Each .tar.gz file follows below structure | |
| ``` | |
| frame1 | |
| --rgb | |
| -----left_distorted.png (or left.png) | |
| -----right_distorted.png (or right.png) | |
| --nir | |
| -----left_distorted.png (or left.png) | |
| -----right_distorted.png (or right.png) | |
| storage.hdf5 | |
| ``` | |
| The frame ids are named after their creation date. | |
| **_distorted.png** image need to be undistorted. **left.png** and **right.png** are undistorted version. | |
| **storage.hdf5** is H5 database. it contains **frame** group with children of each frame ids. | |
| --- | |
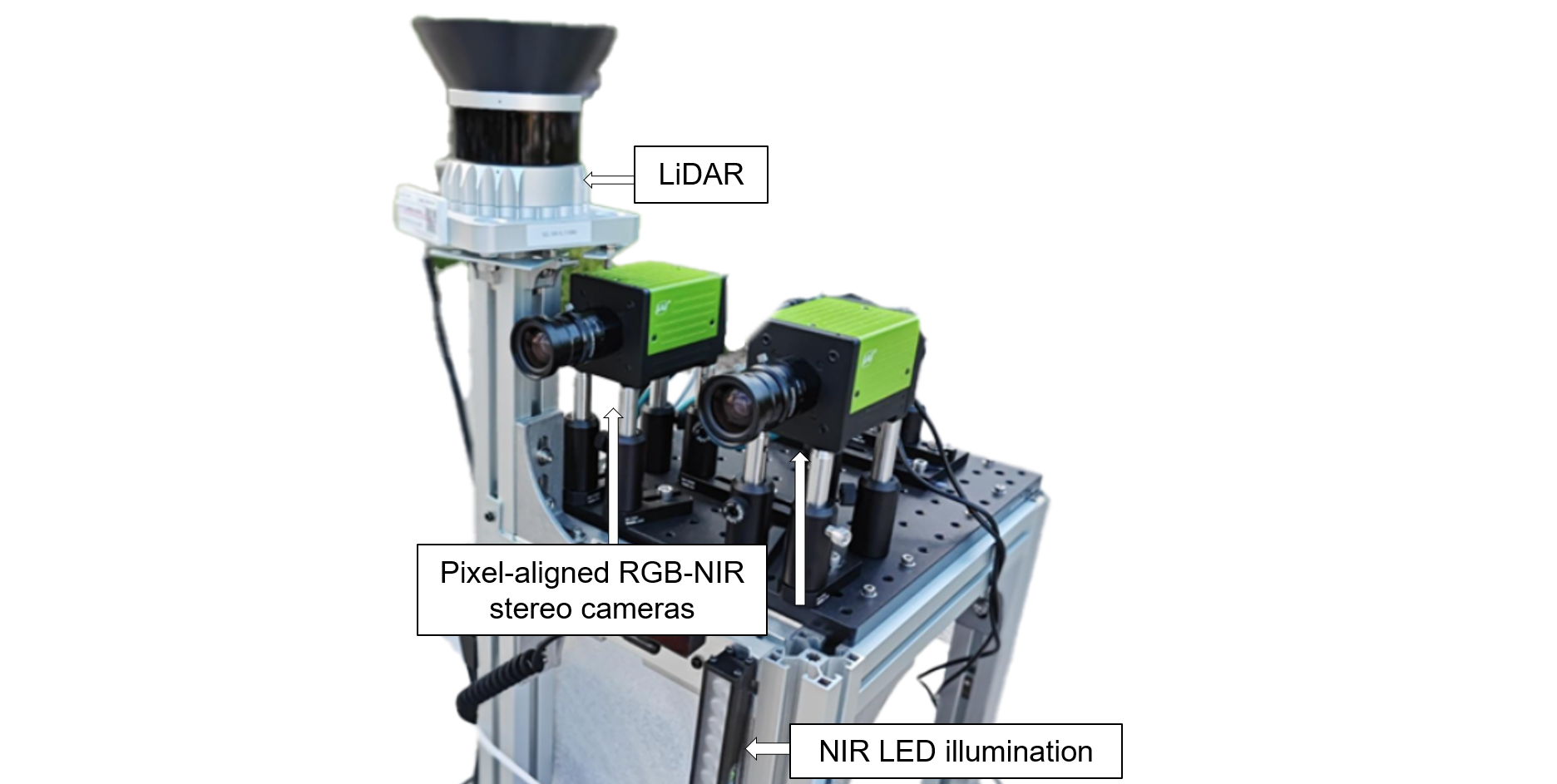
| ## 📷 Imaging System | |
| Our robotic platform integrates: | |
| - **Two RGB-NIR stereo cameras** (pixel-aligned RGB and NIR sensors) | |
| - **LiDAR sensor** | |
| - **Omnidirectional mobile base** (360° movement) | |
| - **High-capacity battery** (up to 6 hours) | |
| - **NIR LED bar light source** for consistent active illumination | |
|  | |
| --- | |
| ## 🔧 Methods | |
| ### RGB-NIR synthetic data augmentation | |
|  | |
| See **visualize/synth_aug_render.ipynb** for method of synthetic data augmentation to build RGB-NIR training dataset. | |
| ### RGB-NIR Image Fusion | |
|  | |
| We introduce an RGB-NIR **image-level fusion technique** for 3-channel vision tasks. This approach allows existing **RGB-pretrained models** to benefit from NIR information **without additional fine-tuning**. | |
| Applicable to: | |
| - Stereo Depth Estimation | |
| - Semantic Segmentation | |
| - Object Detection | |
| See **net/image_fusion.py** for pytorch implementation. | |
| ### RGB-NIR Feature Fusion (Stereo Depth) | |
| We extend RAFT-Stereo with a novel **feature-level fusion strategy**, alternating between fused and NIR **correlation volumes** during iterative disparity estimation using GRUs. | |
|  | |
| See **net/feature_fusion.py** of implementation with RAFT-Stereo as baseline | |
| Our setup reflects the **RGB with active illumination** scenario: | |
| - NIR provides robust depth cues | |
| - RGB complements NIR with texture under normal lighting | |
| --- | |
| ## 📊 Experimental Results | |
| Our experiments demonstrate that pixel-aligned RGB-NIR inputs: | |
| - Improve stereo depth accuracy under low-light and high-contrast conditions | |
| - Enable pretrained RGB models to generalize better | |
| - Enhance robustness across lighting domains | |
| --- | |
| ## 📄 Citation | |
| If you use this dataset or code, please cite our work: | |
| ```bibtex | |
| @article{kim2025pixelnir, | |
| author = {Jinnyeong Kim and Seung-Hwan Baek}, | |
| title = {Pixel-aligned RGB-NIR Stereo Imaging and Dataset for Robot Vision}, | |
| conference = {The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, | |
| year = {2025}, | |
| doi = {10.48550/arXiv.2411.18025}, | |
| url = {https://arxiv.org/abs/2411.18025}, | |
| } | |