
LEGO-Puzzles: How Good Are MLLMs at Multi-Step Spatial Reasoning?
Kexian Tang1,2*, Junyao Gao1,2*, Yanhong Zeng1†, Haodong Duan1†,
Yanan Sun1, Zhening Xing1, Wenran Liu1, Kaifeng Lyu3‡, Kai Chen1‡
1Shanghai AI Laboratory 2Tongji University 3Tsinghua University
*Equal contribution. †Project Leads. ‡Corresponding Authors.
🎉 News
- [2025/04/08] The benchmark and evaluation code have been released! Have fun 😃 .
- [2025/03/25] The paper is released.
📖 Introduction
In this work, we introduce LEGO-Puzzles, a scalable and systematic benchmark designed to evaluate Multi-step Spatial Reasoning in Multimodal Large Language Models (MLLMs). Inspired by how humans develop spatial cognition through construction, LEGO-Puzzles frames spatial understanding as a series of LEGO assembly tasks that challenge both visual perception and sequential reasoning.
To comprehensively assess spatial reasoning capabilities, LEGO-Puzzles is structured into three core task categories: Spatial Understanding, Single-Step Sequential Reasoning, and Multi-Step Sequential Reasoning. Each task requires models to understand visual inputs, perform step-by-step logical deduction, and maintain spatial consistency across sequences.
Furthermore, based on LEGO-Puzzzles, we design image generation tasks to investigate whether MLLMs can transfer their spatial understanding and reasoning abilities to image generation.
We further introduce LEGO-Puzzles-Lite, a distilled subset tailored for human-model comparison, and a fine-grained evaluation suite named Next-k-Step to test reasoning scalability under increasing complexity.
Despite recent advances in multimodal modeling, our experiments reveal that current state-of-the-art MLLMs—while impressive—fall significantly short of human-level spatial reasoning, especially in multi-step and generative tasks.
LEGO-Puzzles aims to establish a rigorous testbed for benchmarking spatial reasoning in MLLMs and to motivate the development of more spatially-aware multimodal systems.
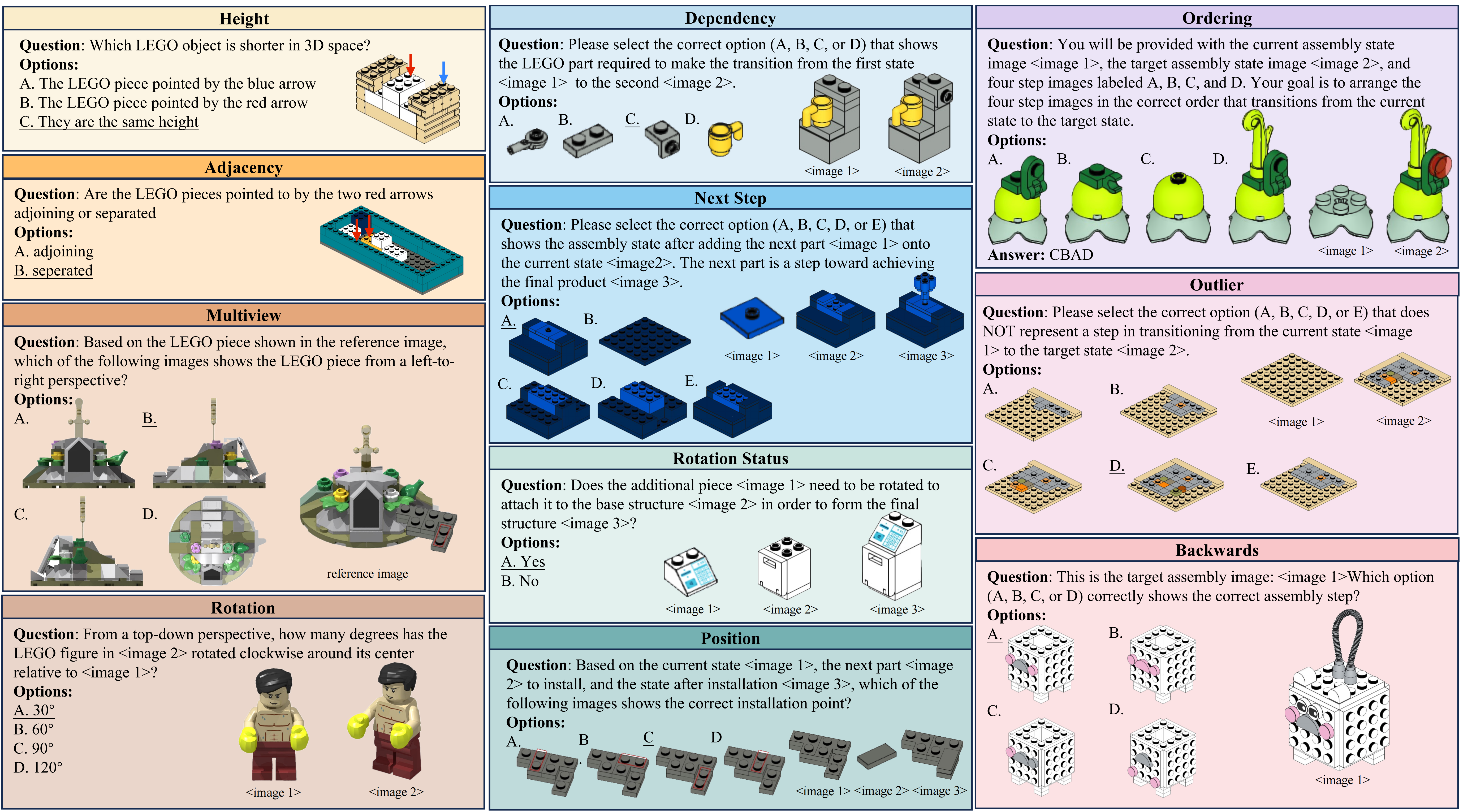
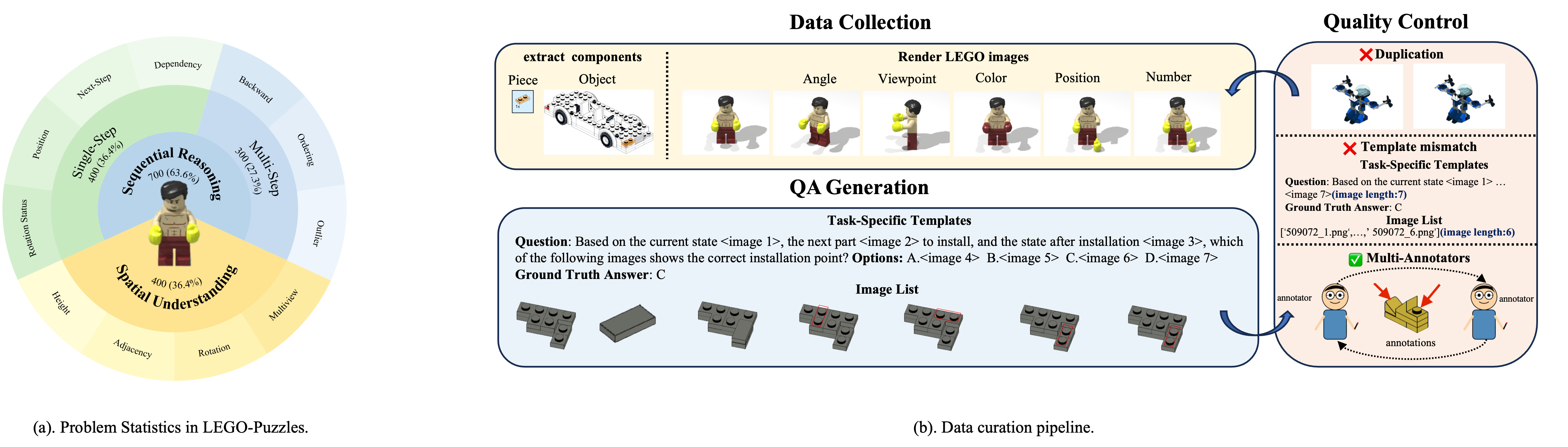
🔍 Dataset & Task Design
LEGO-Puzzles consists of 1,100 curated samples across 11 task types, evenly covering:
- 🧩 Spatial Understanding (36.4%)
- 🔁 Single-Step Sequential Reasoning (36.4%)
- 🧠 Multi-Step Sequential Reasoning (27.3%)
Each task is framed as a visual question-answering problem or a generation prompt grounded in realistic LEGO configurations, enabling precise and interpretable evaluation.
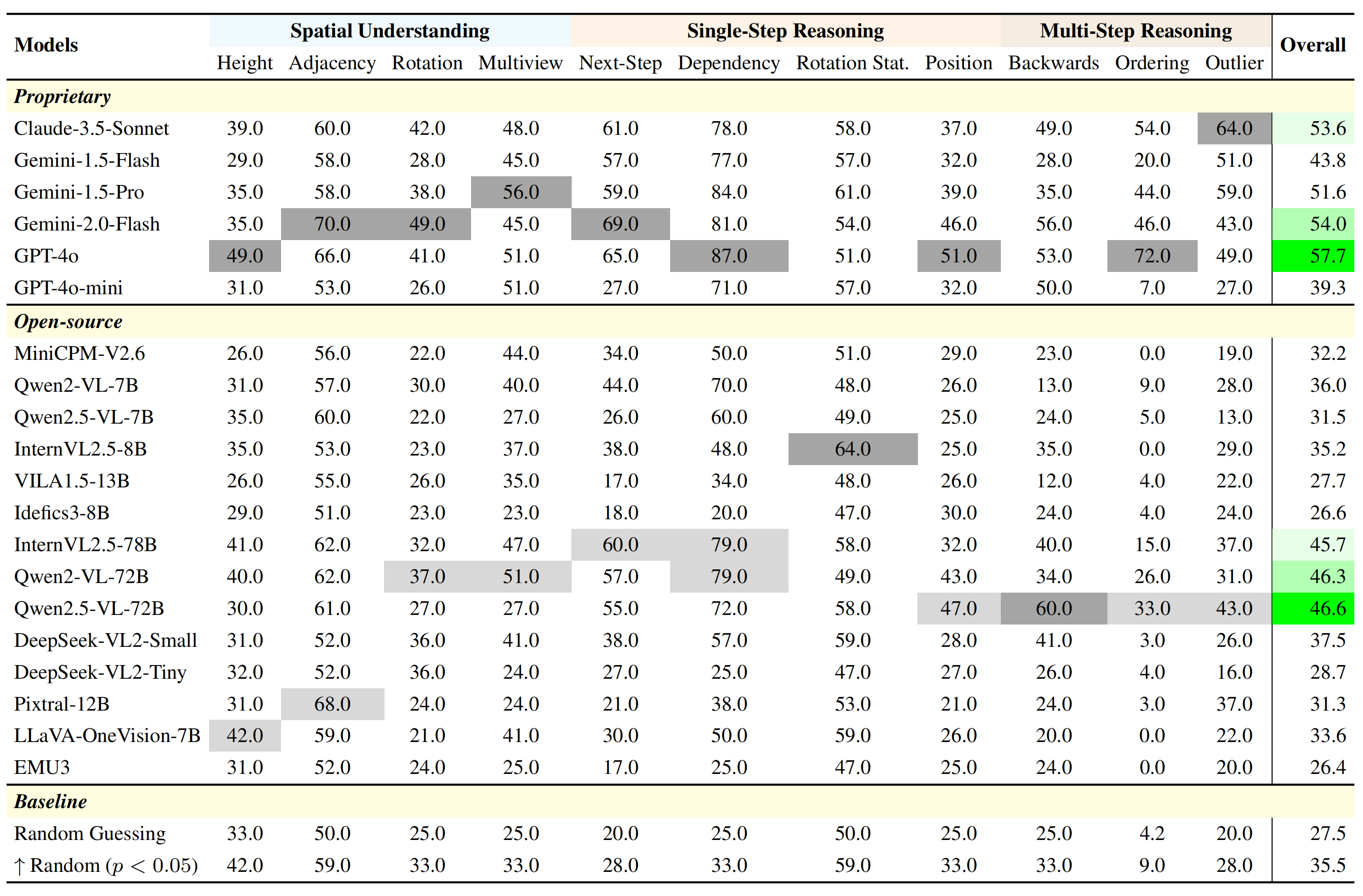
🧪 Main Evaluation Results
We evaluate 20 cutting-edge MLLMs, spanning both open-source and proprietary models. While GPT-4o and Gemini-2.0-Flash lead overall, their performance still trails behind human annotators, especially in tasks requiring 3D spatial alignment, rotation handling, and multi-step assembly tracking.
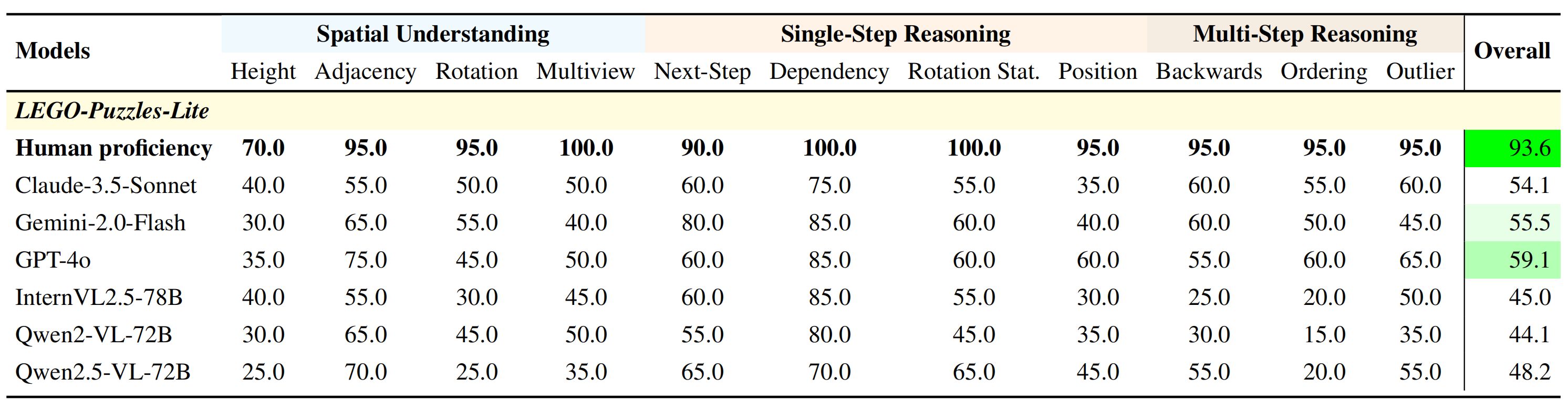
👤 Human vs Model Performance
To highlight the human-model performance gap, we compare top MLLMs against human annotators on LEGO-Puzzles-Lite (220 samples). Humans consistently outperform MLLMs by a wide margin, reaffirming the challenges of spatial reasoning in current AI systems.
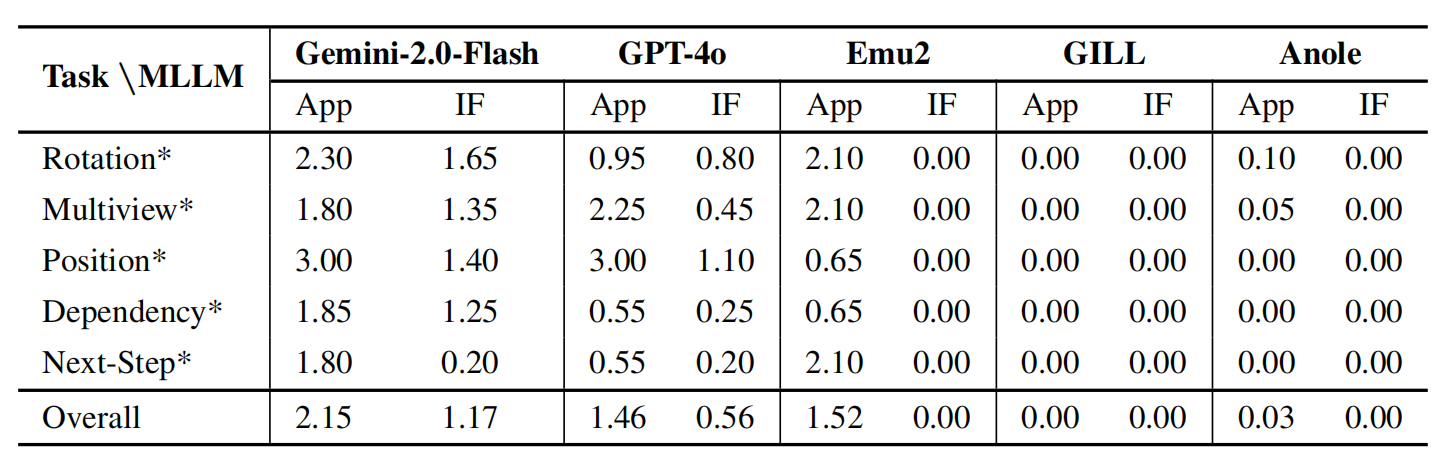
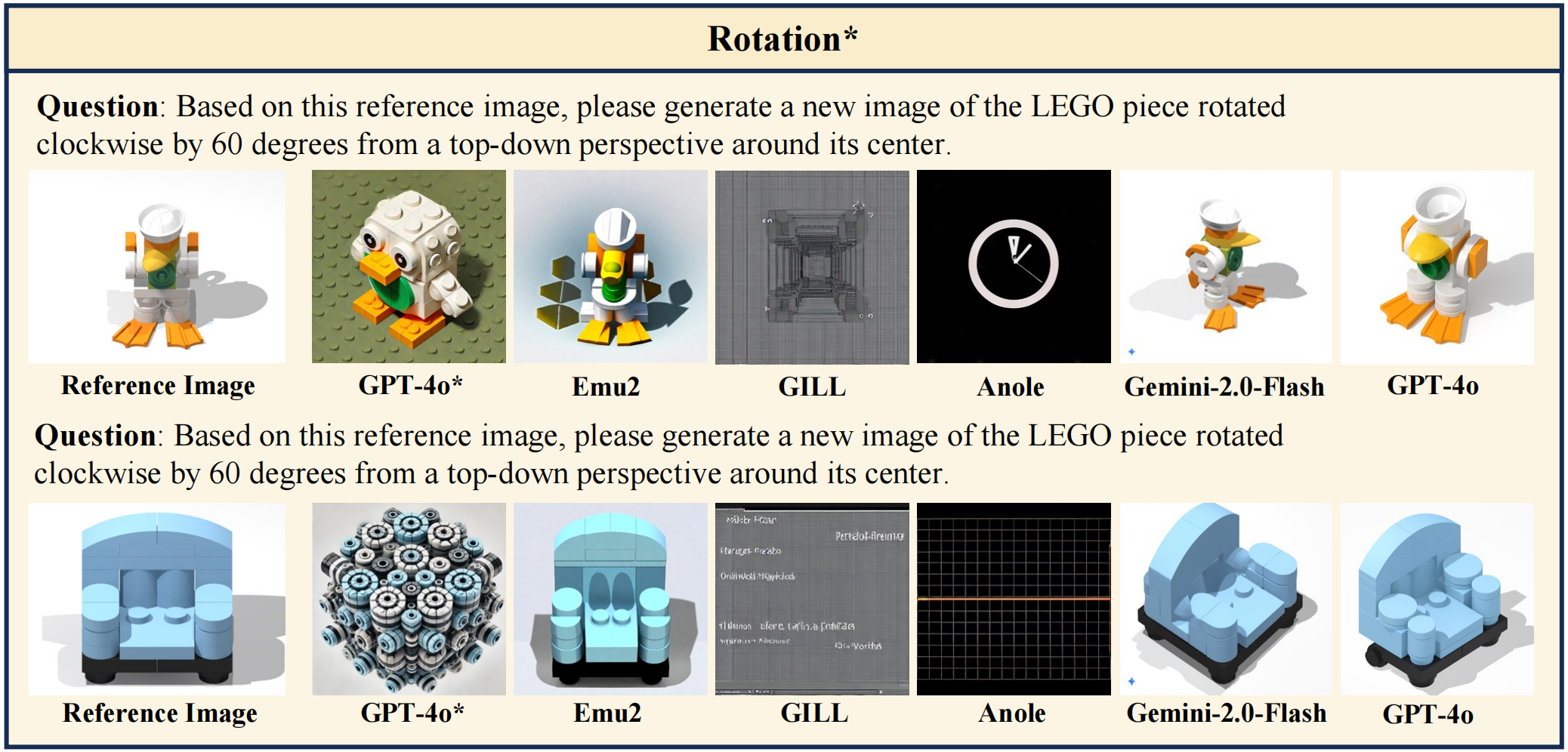
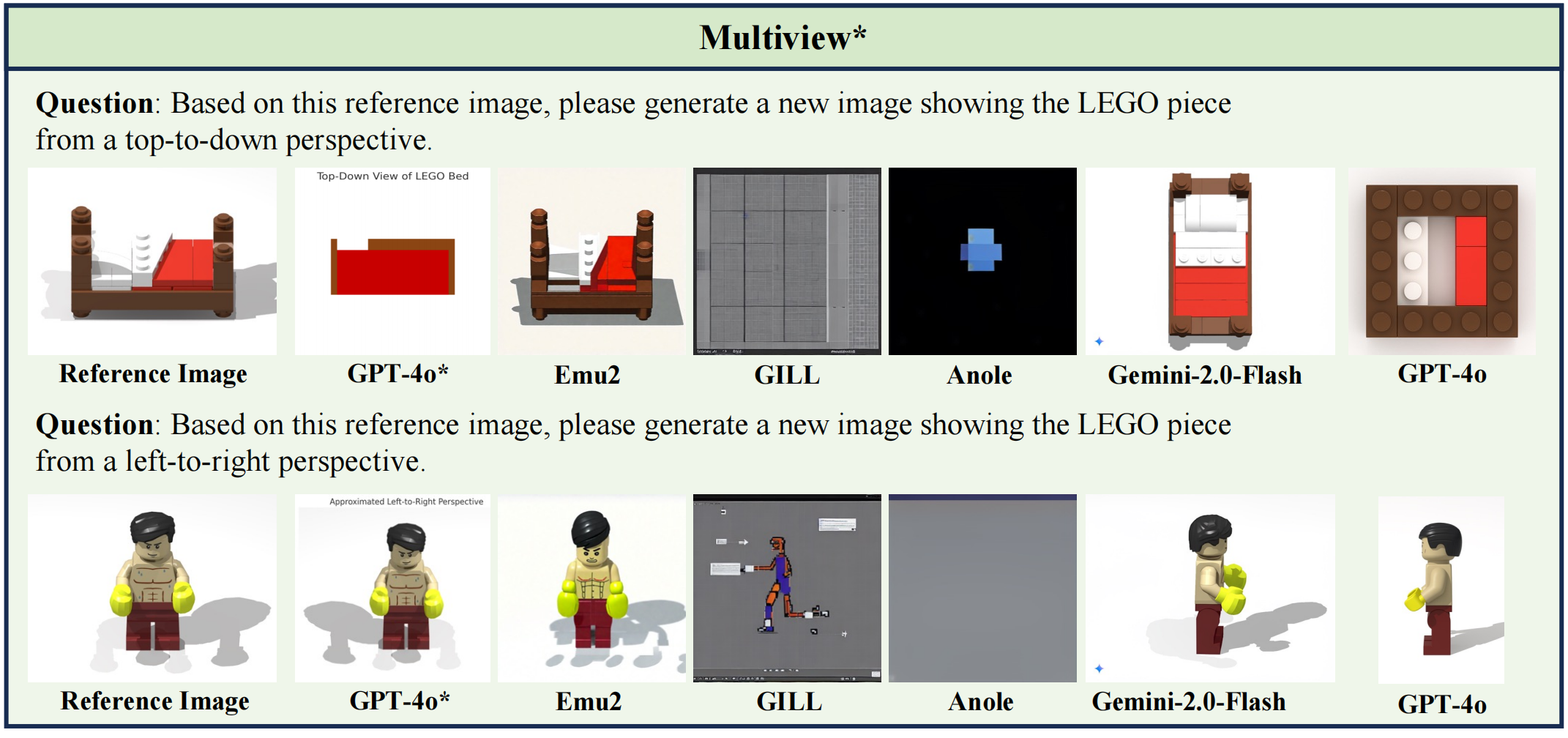
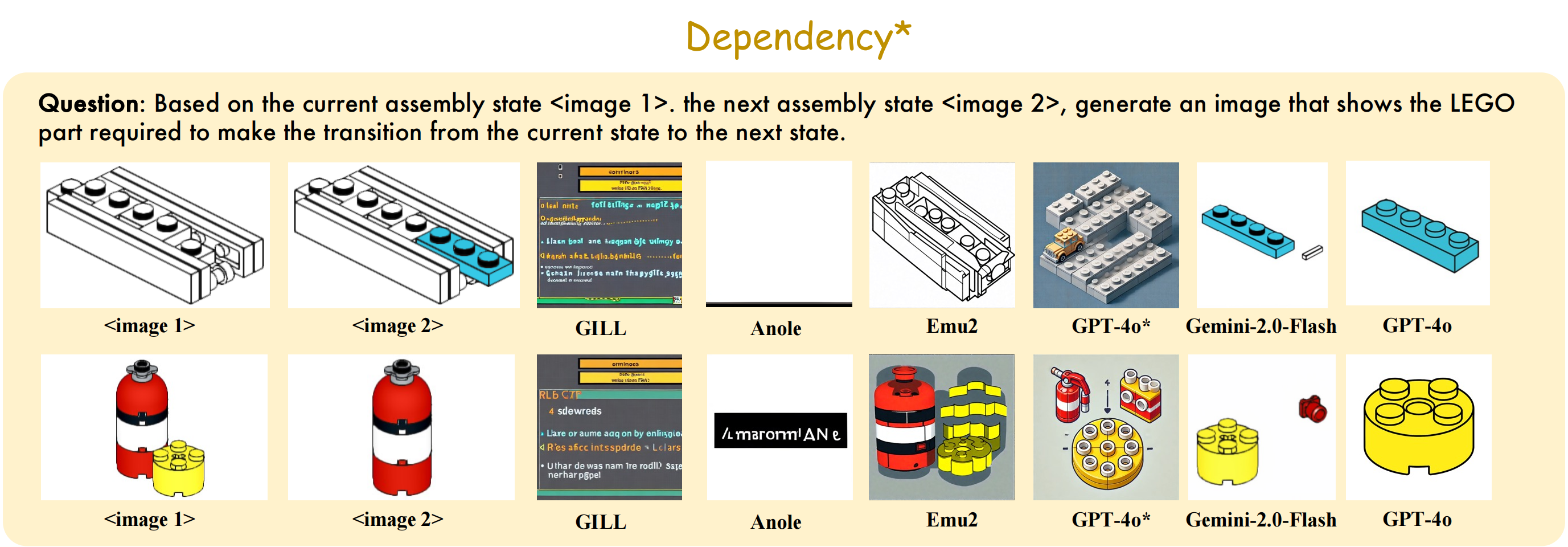
🎨 Image Generation Evaluation
We design 5 LEGO-based image generation tasks testing a model's ability to simulate spatial transformations. Models must generate intermediate assembly states based on instructions. Human evaluators assess the output across two axes:
- 🎯 Appearance Similarity
- 🎯 Instruction Following
Only GPT-4o and Gemini-2.0-Flash demonstrate partial success, while open-source models generally fail to produce structurally valid or instruction-aligned images. We evaluate GPT-4o, Gemini-2.0-Flash, GPT-4o* (referring to the version released prior to March 6, 2025), Emu2, GILL, and Anole using a scoring scale from 0 to 3 for both Appearance and Instruction Following dimensions.
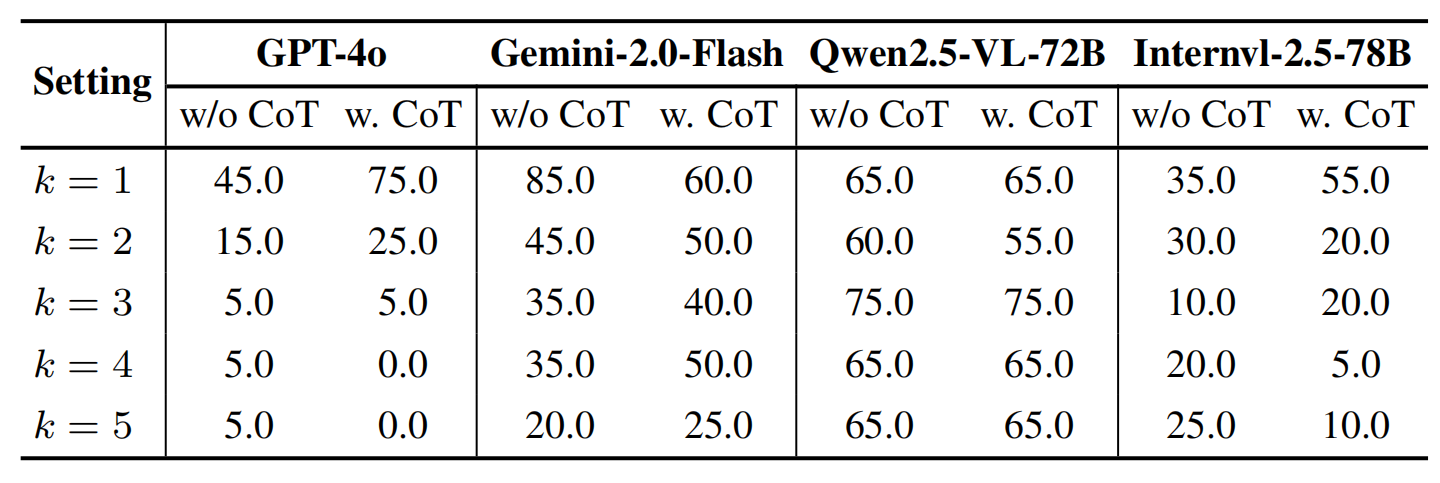
🧠 Multi-Step Reasoning with Next-k-Step
We propose Next-k-Step, a fine-grained reasoning benchmark that challenges models to predict assembly states after k sequential steps. We analyze model performance under varying values of k, both with and without Chain-of-Thought (CoT) prompting. Results suggest CoT does not robustly enhance multi-step spatial reasoning.
🧷 Qualitative Samples
A few representative examples from LEGO-Puzzles are shown below, illustrating the diversity and complexity of the benchmark.
🛠️ Quick Start
We have fully integrated LEGO-Puzzles into VLMEvalKit, a unified framework for benchmarking VLMs. You can easily evaluate your favorite multimodal models on LEGO-Puzzles with just a single command!
Step 0. Installation
git clone https://github.com/open-compass/VLMEvalKit.git
cd VLMEvalKit
pip install -e .
Step 1. Setup API Keys (Optional)
If you want to evaluate API-based models like GPT-4o, Gemini-Pro-V, etc., or use a LLM judge, configure the required keys in a .env file or export them as environment variables:
# Example .env (place it in VLMEvalKit root directory)
OPENAI_API_KEY=your-openai-key
GOOGLE_API_KEY=your-google-api-key
# ...other optional keys
If no key is provided, VLMEvalKit defaults to exact-match scoring (only works for Yes/No or multiple-choice tasks).
Step 2. Run Evaluation on LEGO-Puzzles
You can now run LEGO-Puzzles by simply setting the dataset name to LEGO.
Inference + Evaluation
python run.py --data LEGO --model <your_model_name> --verbose
# Example:
# python run.py --data LEGO --model idefics_80b_instruct --verbose
Inference Only
python run.py --data LEGO --model <your_model_name> --verbose --mode infer
# Example:
# python run.py --data LEGO --model idefics_80b_instruct --verbose --mode infer
Multi-GPU Acceleration (Optional)
torchrun --nproc-per-node=4 run.py --data LEGO --model <your_model_name> --verbose
# Example:
# torchrun --nproc-per-node=4 run.py --data LEGO --model idefics_80b_instruct --verbose
Citation
If you find LEGO-Puzzles useful, please cite using this BibTeX:
@article{tang2025lego,
title={LEGO-Puzzles: How Good Are MLLMs at Multi-Step Spatial Reasoning?},
author={Tang, Kexian and Gao, Junyao and Zeng, Yanhong and Duan, Haodong and Sun, Yanan and Xing, Zhening and Liu,
Wenran and Lyu, Kaifeng and Chen, Kai},
journal={arXiv preprint arXiv:2503.19990},
year={2025}
}