|
|
--- |
|
|
task_categories: |
|
|
- visual-question-answering |
|
|
language: |
|
|
- en |
|
|
--- |
|
|
# STRIDE-QA Dataset |
|
|
|
|
|
[](https://arxiv.org/abs/2508.10427) |
|
|
[](https://turingmotors.github.io/stride-qa/) |
|
|
[](https://github.com/turingmotors/STRIDE-QA-Dataset) |
|
|
[](https://huggingface.co/datasets/turing-motors/STRIDE-QA-Bench) |
|
|
|
|
|
## 📦 Dataset |
|
|
|
|
|
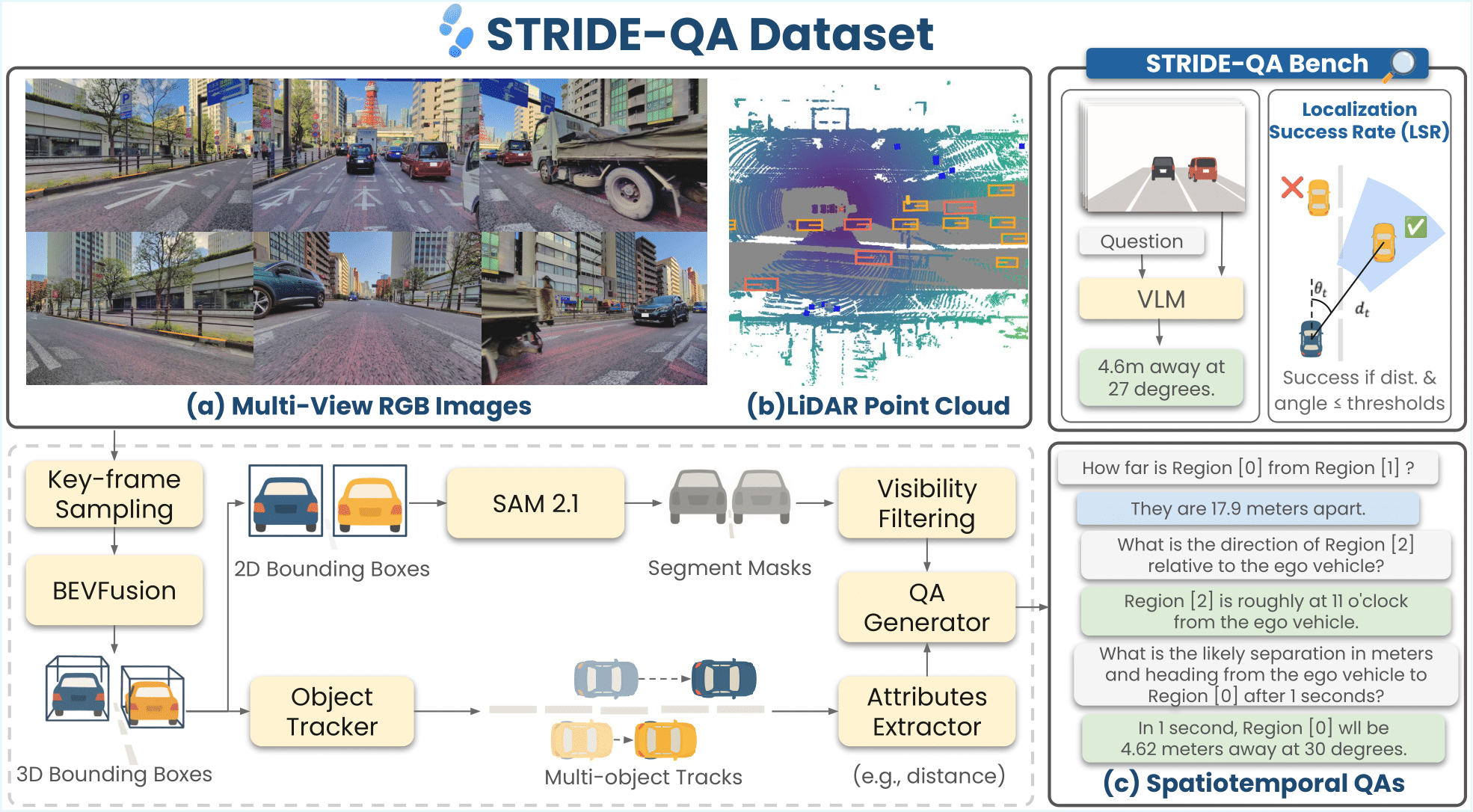
**STRIDE-QA** is a large-scale visual question answering (VQA) dataset for physically grounded spatiotemporal reasoning in autonomous driving. Constructed from 100 hours of multi-sensor driving data in Tokyo, it offers **16 M QA pairs** over **270 K frames** with dense annotations including 3D bounding boxes, segmentation masks, and multi-object tracks. |
|
|
|
|
|
 |
|
|
|
|
|
 |
|
|
|
|
|
| Category | Description | |
|
|
| --- | --- | |
|
|
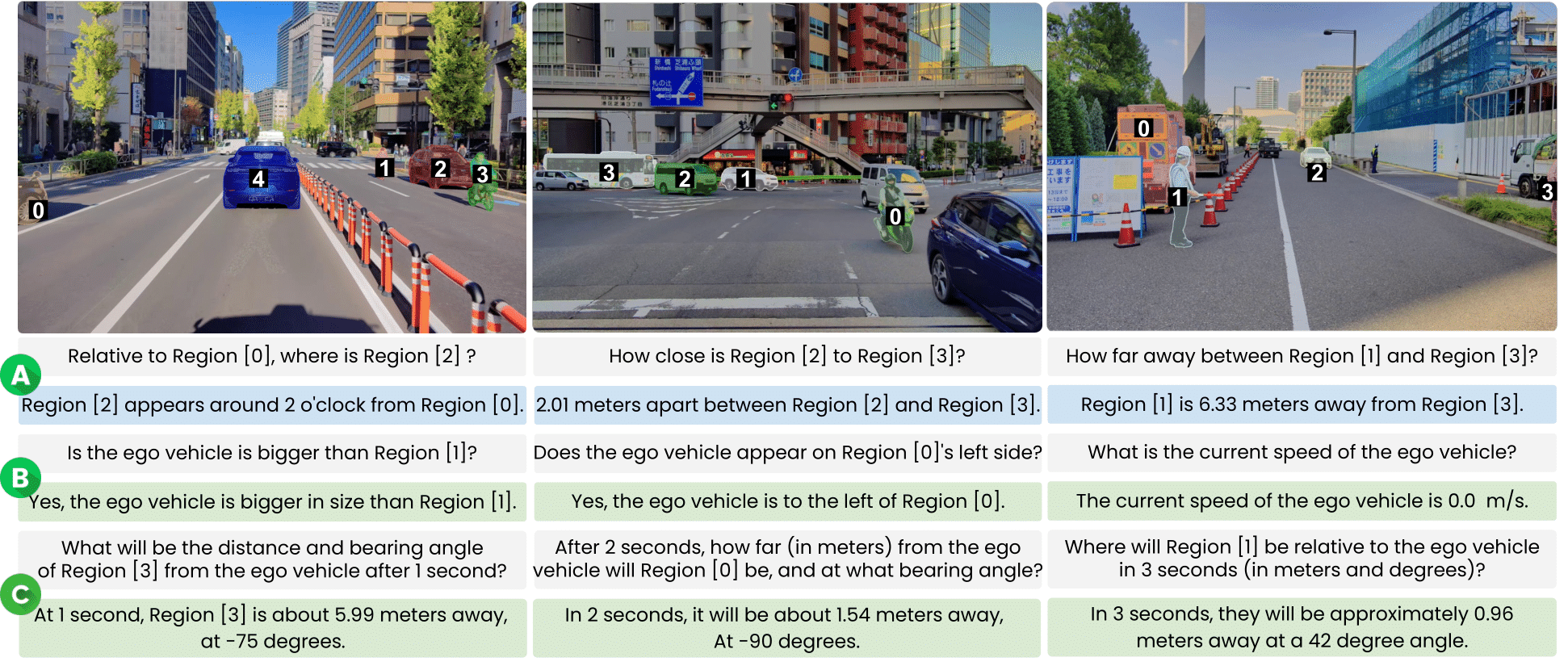
| **Object-centric Spatial QA** | Spatial relations between two surrounding agents (single frame). Includes qualitative (e.g., relative position) and quantitative (e.g., distance, angle) questions. | |
|
|
| **Ego-centric Spatial QA** | Spatial relations between the ego vehicle and a surrounding agent (single frame). Covers distance, direction, and size comparisons. | |
|
|
| **Ego-centric Spatiotemporal QA** | Short-term prediction using 4 context frames (2 Hz). Forecasts distance, heading angle, and velocity at t ∈ {1, 2, 3} s. | |
|
|
|
|
|
| QA Category | Qualitative (train) | Qualitative (val) | Quantitative (train) | Quantitative (val) | Total (M) | |
|
|
| --- | --- | --- | --- | --- | --- | |
|
|
| Object-centric Spatial QA | 2.20 | 0.11 | 1.10 | 0.06 | 3.47 | |
|
|
| Ego-centric Spatial QA | 3.10 | 0.16 | 4.33 | 0.23 | 7.82 | |
|
|
| Ego-centric Spatiotemporal QA | – | – | 4.73 | 0.40 | 5.13 | |
|
|
| **Total** | **5.30** | **0.28** | **10.17** | **0.69** | **16.43** | |
|
|
|
|
|
### Data Format |
|
|
|
|
|
This repository provides front camera images and JSONL annotations. |
|
|
|
|
|
#### Directory Structure |
|
|
|
|
|
```bash |
|
|
STRIDE-QA-Dataset/ |
|
|
├── train/ |
|
|
│ ├── images/ |
|
|
│ └── annotations/ |
|
|
│ ├── ego_centric_spatial_qa/ |
|
|
│ ├── ego_centric_spatiotemporal_qa/ |
|
|
│ └── object_centric_spatial_qa/ |
|
|
└── val/ |
|
|
├── images/ |
|
|
└── annotations/ |
|
|
├── ego_centric_spatial_qa/ |
|
|
├── ego_centric_spatiotemporal_qa/ |
|
|
└── object_centric_spatial_qa/ |
|
|
``` |
|
|
|
|
|
#### Data Fields |
|
|
|
|
|
The dataset is provided in `.jsonl.gz`. Each line in the JSONL file represents a single sample with the following fields: |
|
|
|
|
|
| Field | Type | Description | |
|
|
| --- | --- | --- | |
|
|
| `id` | `str` | Unique sample ID. | |
|
|
| `split` | `str` | Dataset split (`train` or `val`). | |
|
|
| `category` | `str` | QA category type. | |
|
|
| `image` | `str` | File name of the key frame used in the prompt. | |
|
|
| `images` | `list[str]` | File names for the four consecutive image frames. Only available in Ego-centric Spatiotemporal QA category. | |
|
|
| `conversations` | `list[dict]` | Dialogue in VILA format (`"from": "human"` / `"gpt"`). | |
|
|
| `image_info` | `dict` | Image metadata (height, width, dataset, landmark, file_path). | |
|
|
| `token_info` | `dict` | Sample and sample data tokens for nuScenes reference. | |
|
|
| `qa_info` | `list[dict]` | Metadata for each QA turn (type, category, class, token). | |
|
|
| `bbox` | `list[list[float]]` | Bounding boxes \[x₁, y₁, x₂, y₂] for referenced regions. | |
|
|
| `rle` | `list[dict]` | COCO-style run-length masks for regions. | |
|
|
| `region` | `list[list[int]]` | Region tags mentioned in the prompt. | |
|
|
|
|
|
#### Example Records |
|
|
|
|
|
##### Object-centric Spatial QA |
|
|
|
|
|
```json |
|
|
{ |
|
|
"id": "0004143dce0d1445", |
|
|
"split": "val", |
|
|
"category": "object_centric_spatial_qa", |
|
|
"image": "0004143dce0d1445.jpg", |
|
|
"conversations": [ |
|
|
{ |
|
|
"from": "human", |
|
|
"value": "Is Region [3] taller than Region [0]?" |
|
|
}, |
|
|
{ |
|
|
"from": "gpt", |
|
|
"value": "No, Region [3] is not taller than Region [0]." |
|
|
} |
|
|
// ... more QA pairs ... |
|
|
], |
|
|
"image_info": { |
|
|
"height": 1860, |
|
|
"width": 2880, |
|
|
"dataset": "STRIDE-QA", |
|
|
"landmark": "outdoor", |
|
|
"file_path": "0004143dce0d1445.jpg" |
|
|
}, |
|
|
"token_info": { |
|
|
"sample_token": "a2950b1d20375897e99b633a981e4dfe", |
|
|
"sample_data_token": "4aba804904f3a1a2d3271b1fe8a6fc92" |
|
|
}, |
|
|
"qa_info": [ |
|
|
{ |
|
|
"type": "qualitative", |
|
|
"category": "tall_predicate", |
|
|
"class": ["car", "large_vehicle"], |
|
|
"token": { |
|
|
"obj_A": { |
|
|
"instance_token": "c7238672f1bfcc08929f99729f842948", |
|
|
"sample_annotation_token": "a8189cdb160a525e2f798e739849fe8b" |
|
|
}, |
|
|
"obj_B": { |
|
|
"instance_token": "4941cec428bd732ff3e54ee43fbcc0e1", |
|
|
"sample_annotation_token": "bac4d2c0ae8d029e406961655bf82ee9" |
|
|
} |
|
|
} |
|
|
} |
|
|
// ... more qa_info entries ... |
|
|
], |
|
|
"bbox": [ |
|
|
[0.0, 101.39, 881.81, 1657.32] |
|
|
// ... more bounding boxes ... |
|
|
], |
|
|
"rle": [ |
|
|
{ |
|
|
"size": [1860, 2880], |
|
|
"counts": "o7\\W12jhN^b0VW1b]OjhN^b0VW1..." |
|
|
} |
|
|
// ... more RLE masks ... |
|
|
], |
|
|
"region": [ |
|
|
[3, 0] |
|
|
// ... more region tags ... |
|
|
] |
|
|
} |
|
|
``` |
|
|
|
|
|
##### Ego-centric Spatial QA |
|
|
|
|
|
```json |
|
|
{ |
|
|
"id": "0004143dce0d1445", |
|
|
"split": "val", |
|
|
"category": "ego_centric_spatial_qa", |
|
|
"image": "0004143dce0d1445.jpg", |
|
|
"conversations": [ |
|
|
{ |
|
|
"from": "human", |
|
|
"value": "Is the ego vehicle bigger than Region [0]?" |
|
|
}, |
|
|
{ |
|
|
"from": "gpt", |
|
|
"value": "Incorrect, the ego vehicle is not larger than Region [0]." |
|
|
} |
|
|
// ... more QA pairs ... |
|
|
], |
|
|
"image_info": { |
|
|
"height": 1860, |
|
|
"width": 2880, |
|
|
"dataset": "STRIDE-QA", |
|
|
"landmark": "outdoor", |
|
|
"file_path": "0004143dce0d1445.jpg" |
|
|
}, |
|
|
"token_info": { |
|
|
"sample_token": "a2950b1d20375897e99b633a981e4dfe", |
|
|
"sample_data_token": "4aba804904f3a1a2d3271b1fe8a6fc92" |
|
|
}, |
|
|
"qa_info": [ |
|
|
{ |
|
|
"type": "qualitative", |
|
|
"category": "ego_big_predicate", |
|
|
"class": ["ego_vehicle", "large_vehicle"], |
|
|
"token": { |
|
|
"ego": { |
|
|
"instance_token": null, |
|
|
"sample_annotation_token": null |
|
|
}, |
|
|
"other": { |
|
|
"instance_token": "4941cec428bd732ff3e54ee43fbcc0e1", |
|
|
"sample_annotation_token": "bac4d2c0ae8d029e406961655bf82ee9" |
|
|
} |
|
|
} |
|
|
} |
|
|
// ... more qa_info entries ... |
|
|
], |
|
|
"bbox": [ |
|
|
[0.0, 101.39, 881.81, 1657.32] |
|
|
// ... more bounding boxes ... |
|
|
], |
|
|
"rle": [ |
|
|
{ |
|
|
"size": [1860, 2880], |
|
|
"counts": "o7\\W12jhN^b0VW1b]OjhN^b0VW1..." |
|
|
} |
|
|
// ... more RLE masks ... |
|
|
], |
|
|
"region": [ |
|
|
[99, 0] |
|
|
// ... more region tags ... |
|
|
] |
|
|
} |
|
|
``` |
|
|
|
|
|
##### Ego-centric Spatio-temporal QA |
|
|
|
|
|
```json |
|
|
{ |
|
|
"id": "0004143dce0d1445", |
|
|
"split": "val", |
|
|
"category": "ego_centric_spatiotemporal_qa", |
|
|
"images": [ |
|
|
"31ee9bcfc3ed9dec.jpg", |
|
|
"f6db1dee9bddc641.jpg", |
|
|
"c76385f109139ea8.jpg", |
|
|
"0004143dce0d1445.jpg" |
|
|
], |
|
|
"conversations": [ |
|
|
{ |
|
|
"from": "human", |
|
|
"value": "Can you give me an estimate of the distance between the ego vehicle and Region [0]?" |
|
|
}, |
|
|
{ |
|
|
"from": "gpt", |
|
|
"value": "The ego vehicle and Region [0] are 3.27 meters apart from each other." |
|
|
} |
|
|
// ... more QA pairs ... |
|
|
], |
|
|
"image_info": { |
|
|
"height": 1860, |
|
|
"width": 2880, |
|
|
"dataset": "STRIDE-QA", |
|
|
"landmark": "outdoor", |
|
|
"file_path": "0004143dce0d1445.jpg" |
|
|
}, |
|
|
"token_info": { |
|
|
"current": { |
|
|
"sample_token": "a2950b1d20375897e99b633a981e4dfe", |
|
|
"sample_data_token": "4aba804904f3a1a2d3271b1fe8a6fc92" |
|
|
}, |
|
|
"prev_1": { |
|
|
"sample_token": "93f455351c376fb32dc6315c3d0c53e2", |
|
|
"sample_data_token": "0ec22aef72d02da0f26763b22ec7afe3" |
|
|
} |
|
|
// ... prev_2, prev_3 ... |
|
|
}, |
|
|
"qa_info": [ |
|
|
{ |
|
|
"category": "target_distance_t0", |
|
|
"target": { |
|
|
"instance_token": "4941cec428bd732ff3e54ee43fbcc0e1", |
|
|
"sample_annotation_token": "bac4d2c0ae8d029e406961655bf82ee9", |
|
|
"class": "large_vehicle", |
|
|
"region_id": 0 |
|
|
}, |
|
|
"state": { |
|
|
"ego": { |
|
|
"speed_mps": 4.38 |
|
|
}, |
|
|
"target": { |
|
|
"speed_mps": 6.42, |
|
|
"distance_m": 3.27, |
|
|
"bearing_deg": 18.58, |
|
|
"clock_position": 11 |
|
|
}, |
|
|
"after_t_seconds": 0 |
|
|
} |
|
|
} |
|
|
// ... more qa_info entries ... |
|
|
], |
|
|
"bbox": { |
|
|
"current": [ |
|
|
[0.0, 101.39, 881.81, 1657.32] |
|
|
// ... more bounding boxes ... |
|
|
], |
|
|
"prev_1": [ |
|
|
[0.0, 0.0, 802.30, 1860.0] |
|
|
// ... more bounding boxes ... |
|
|
] |
|
|
// ... prev_2, prev_3 ... |
|
|
}, |
|
|
"rle": { |
|
|
"current": [ |
|
|
{ |
|
|
"size": [1860, 2880], |
|
|
"counts": "o7\\W12jhN^b0VW1b]OjhN^b0VW1..." |
|
|
} |
|
|
// ... more RLE masks ... |
|
|
] |
|
|
// ... prev_1, prev_2, prev_3 ... |
|
|
} |
|
|
} |
|
|
``` |
|
|
|
|
|
## 📄 License |
|
|
|
|
|
STRIDE-QA-Dataset is released under the [CC BY-NC-SA 4.0](https://creativecommons.org/licenses/by-nc-sa/4.0/deed.en). |
|
|
|
|
|
## 📚 Citation |
|
|
|
|
|
```bibtex |
|
|
@misc{strideqa2025, |
|
|
title={STRIDE-QA: Visual Question Answering Dataset for Spatiotemporal Reasoning in Urban Driving Scenes}, |
|
|
author={Keishi Ishihara and Kento Sasaki and Tsubasa Takahashi and Daiki Shiono and Yu Yamaguchi}, |
|
|
year={2025}, |
|
|
eprint={2508.10427}, |
|
|
archivePrefix={arXiv}, |
|
|
primaryClass={cs.CV}, |
|
|
url={https://arxiv.org/abs/2508.10427}, |
|
|
} |
|
|
``` |
|
|
|
|
|
## 🤝 Acknowledgements |
|
|
|
|
|
This dataset was developed as part of the project JPNP20017, which is subsidized by the New Energy and Industrial Technology Development Organization (NEDO), Japan. |
|
|
|
|
|
We would like to acknowledge the use of the following open-source repositories: |
|
|
|
|
|
- [SpatialRGPT](https://github.com/AnjieCheng/SpatialRGPT?tab=readme-ov-file) for building dataset generation pipeline |
|
|
- [SAM 2.1](https://github.com/facebookresearch/sam2) for segmentation mask generation |
|
|
- [dashcam-anonymizer](https://github.com/varungupta31/dashcam_anonymizer) for anonymization |
|
|
|
|
|
## 🔏 Privacy Protection |
|
|
|
|
|
To ensure privacy protection, human faces and license plates in the images were anonymized using the [Dashcam Anonymizer](https://github.com/varungupta31/dashcam_anonymizer). |

