
File size: 5,859 Bytes
d7f9824 439d5f6 d7f9824 439d5f6 d7f9824 439d5f6 d7f9824 439d5f6 d7f9824 891b91a |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
---
license: cc-by-4.0
task_categories:
- robotics
- image-segmentation
- image-text-to-text
---
# OSMa-Bench Dataset
[**Project Page**](https://be2rlab.github.io/OSMa-Bench/) | [**Paper**](https://huggingface.co/papers/2503.10331) | [**Code**](https://github.com/be2rlab/OSMa-Bench)
[](https://be2rlab.github.io/OSMa-Bench/)
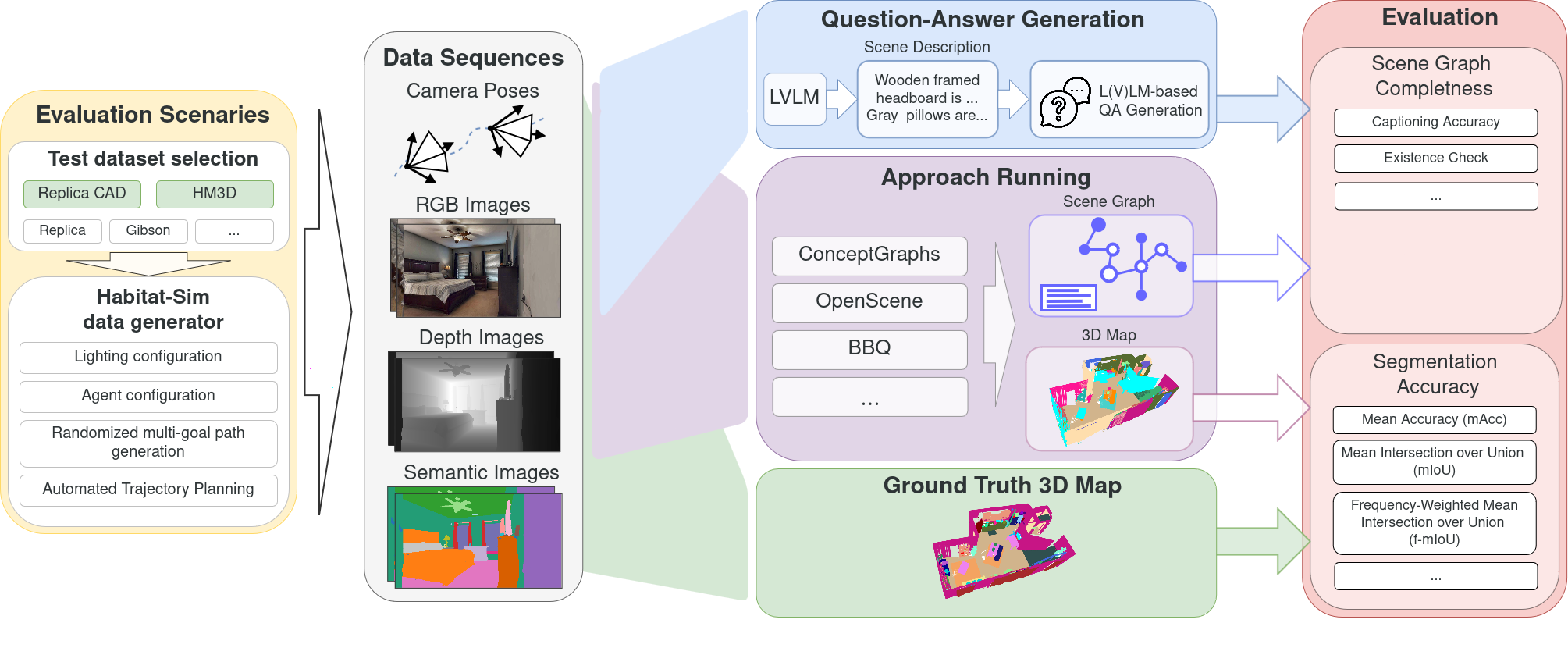
OSMa-Bench (Open Semantic Mapping Benchmark) dataset is a fully automatically generated dataset for evaluating the robustness of open semantic mapping and segmentation systems under varying indoor lighting conditions and robot movement dynamics. This dataset is part of [OSMa-Bench](https://be2rlab.github.io/OSMa-Bench/) pipeline.
## Dataset Summary
This dataset provides simulated RGB-D and semantically annotated posed sequences for evaluation of semantic mapping and segmentation, with a particular focus on handling dynamic lighting—a critical but often overlooked factor in existing benchmarks. It also includes a collection of automatically generated question–answer pairs across multiple categories to support the evaluation of scene-graph–based reasoning, offering a task-driven measure of how well a system’s reconstructed scene captures semantic relationships between objects.
The data is built upon two base datasets:
- **ReplicaCAD**: 22 scenes with 4 lighting configurations and a velocity modifier.
- **Habitat Matterport 3D (HM3D)**: 8 scenes with 2 lighting configurations and a velocity modifier.
## Installation
We offer two versions of the dataset: one with separate files and one as a single compressed archive. Use the following command to download the separated files (may be slow):
```bash
git xet install
git clone https://huggingface.co/datasets/warmhammer/OSMa-Bench_dataset -b main
```
and this command to download the compressed version (faster one):
```bash
git xet install
git clone https://huggingface.co/datasets/warmhammer/OSMa-Bench_dataset -b compressed
unzip data.zip
```
## Data Configurations
The dataset includes the following configurations for the ReplicaCAD and HM3D scenes:
| Configuration | Description |
| :--- | :--- |
| `baseline` | Static, non-uniformly distributed light sources (ReplicaCAD only) |
| `dynamic_lighting` | Lighting conditions change along the robot's path (ReplicaCAD only) |
| `nominal_lights` | The mesh itself emits light without added light sources |
| `camera_light` | An extra directed light source is attached to the camera |
| `velocity` | Sequences recorded at doubled nominal velocity |
---
## Data Structure
The dataset provides structured data for each scene, suitable for tasks like 3D scene understanding, visual question answering, and robotics. Each scene contains the following components:
| Component | Description | Format / Example |
| ------------------------- | ------------------------------------------------------------------------------------------------- | --------------------------------------|
| **RGB Images** | Standard color images captured from different camera viewpoints. | `frame000000.jpg`, ... |
| **Depth Images** | Depth maps aligned with RGB images. Each pixel encodes depth in meters. | `depth000000.png`, ... |
| **Semantic Masks** | Pixel-wise semantic segmentation labels. Each pixel corresponds to a semantic class ID. | `semantic000000.png`, ... |
| **Camera Trajectories** | Flattened 4×4 transformation matrices representing camera poses for each frame. | `traj.txt` (one 4×4 matrix per line) |
| **Question-Answer Pairs** | Validated question-answer pairs related to the scene, optionally associated with specific frames. | `validated_questions.json` |
## VQA Question Categories
The dataset includes a automatically generated answer-question pairs with the following question types:
1. **Binary General** – Yes/No questions about the presence of objects and general scene characteristics
*Example:* `Is there a blue sofa?`
2. **Binary Existence-Based** – Yes/No questions designed to track false positives by querying non-existent objects
*Example:* `Is there a piano?`
3. **Binary Logical** – Yes/No questions with logical operators such as AND/OR
*Example:* `Is there a chair AND a table?`
4. **Measurement** – Questions requiring numerical answers related to object counts or scene attributes
*Example:* `How many windows are present?`
5. **Object Attributes** – Queries about object properties, including color, shape, and material
*Example:* `What color is the door?`
6. **Object Relations (Functional)** – Questions about functional relationships between objects
*Example:* `Which object supports the table?`
7. **Object Relations (Spatial)** – Queries about spatial placement of objects within the scene
*Example:* `What is in front of the staircase?`
8. **Comparison** – Questions that compare object properties such as size, color, and position
*Example:* `Which is taller: the bookshelf or the lamp?`
## Citation
Using OSMa-Bench dataset in your research? Please cite following paper: [OSMa-Bench arxiv](https://arxiv.org/abs/2503.10331).
```bibtex
@inproceedings{popov2025osmabench,
title = {OSMa-Bench: Evaluating Open Semantic Mapping Under Varying Lighting Conditions},
author = {Popov, Maxim and Kurkova, Regina and Iumanov, Mikhail and Mahmoud, Jaafar and Kolyubin, Sergey},
booktitle = {2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2025}
}
``` |