
Add task categories, paper link and code link
#1
by nielsr HF Staff - opened
README.md
CHANGED
|
@@ -1,15 +1,19 @@
|
|
| 1 |
---
|
| 2 |
license: cc-by-4.0
|
|
|
|
|
|
|
|
|
|
|
|
|
| 3 |
---
|
| 4 |
|
| 5 |
# OSMa-Bench Dataset
|
| 6 |
|
|
|
|
|
|
|
| 7 |
[](https://be2rlab.github.io/OSMa-Bench/)
|
| 8 |
|
| 9 |
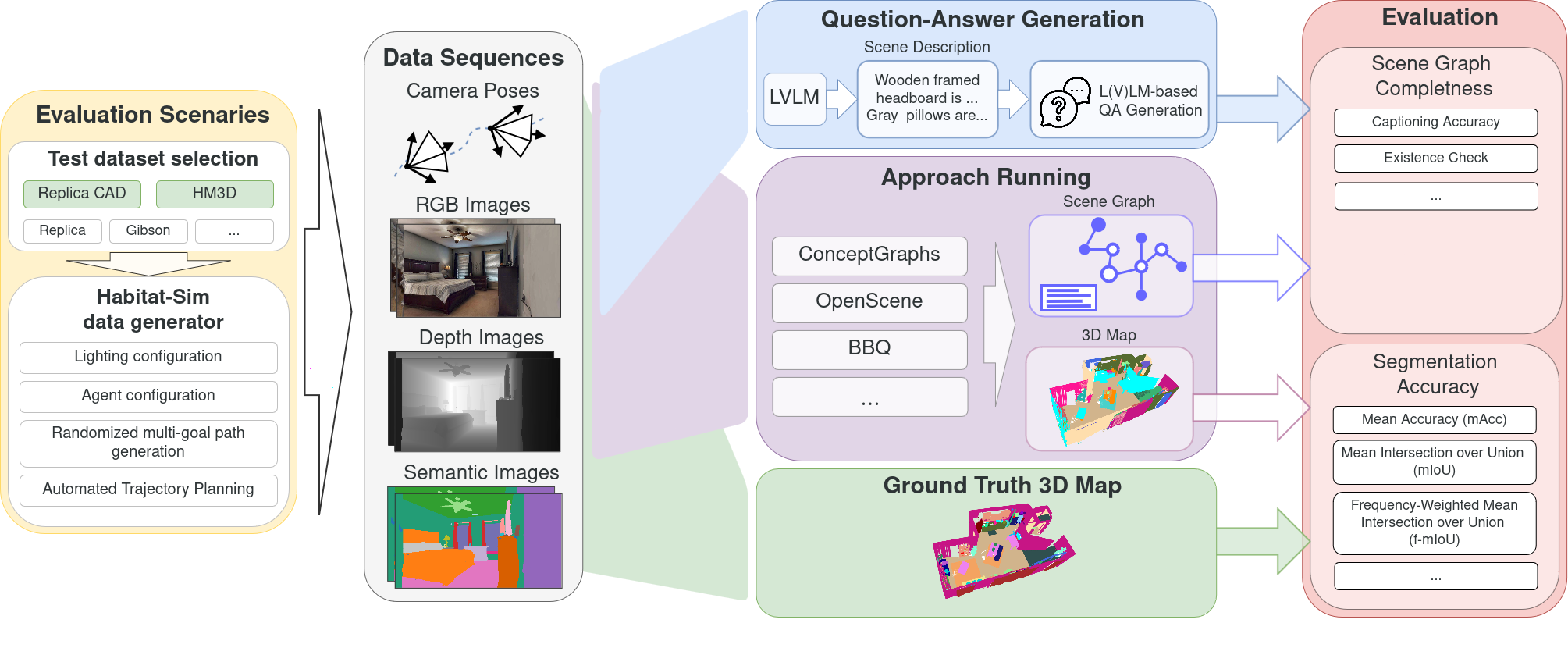
OSMa-Bench (Open Semantic Mapping Benchmark) dataset is a fully automatically generated dataset for evaluating the robustness of open semantic mapping and segmentation systems under varying indoor lighting conditions and robot movement dynamics. This dataset is part of [OSMa-Bench](https://be2rlab.github.io/OSMa-Bench/) pipeline.
|
| 10 |
|
| 11 |
-
- **Homepage:** [OSMa-Bench Project Page](https://be2rlab.github.io/OSMa-Bench/)
|
| 12 |
-
|
| 13 |
## Dataset Summary
|
| 14 |
|
| 15 |
This dataset provides simulated RGB-D and semantically annotated posed sequences for evaluation of semantic mapping and segmentation, with a particular focus on handling dynamic lighting—a critical but often overlooked factor in existing benchmarks. It also includes a collection of automatically generated question–answer pairs across multiple categories to support the evaluation of scene-graph–based reasoning, offering a task-driven measure of how well a system’s reconstructed scene captures semantic relationships between objects.
|
|
@@ -48,7 +52,7 @@ The dataset includes the following configurations for the ReplicaCAD and HM3D sc
|
|
| 48 |
|
| 49 |
---
|
| 50 |
|
| 51 |
-
## Data
|
| 52 |
|
| 53 |
The dataset provides structured data for each scene, suitable for tasks like 3D scene understanding, visual question answering, and robotics. Each scene contains the following components:
|
| 54 |
|
|
@@ -88,7 +92,7 @@ The dataset includes a automatically generated answer-question pairs with the fo
|
|
| 88 |
*Example:* `Which is taller: the bookshelf or the lamp?`
|
| 89 |
|
| 90 |
|
| 91 |
-
##
|
| 92 |
|
| 93 |
Using OSMa-Bench dataset in your research? Please cite following paper: [OSMa-Bench arxiv](https://arxiv.org/abs/2503.10331).
|
| 94 |
|
|
|
|
| 1 |
---
|
| 2 |
license: cc-by-4.0
|
| 3 |
+
task_categories:
|
| 4 |
+
- robotics
|
| 5 |
+
- image-segmentation
|
| 6 |
+
- image-text-to-text
|
| 7 |
---
|
| 8 |
|
| 9 |
# OSMa-Bench Dataset
|
| 10 |
|
| 11 |
+
[**Project Page**](https://be2rlab.github.io/OSMa-Bench/) | [**Paper**](https://huggingface.co/papers/2503.10331) | [**Code**](https://github.com/be2rlab/OSMa-Bench)
|
| 12 |
+
|
| 13 |
[](https://be2rlab.github.io/OSMa-Bench/)
|
| 14 |
|
| 15 |
OSMa-Bench (Open Semantic Mapping Benchmark) dataset is a fully automatically generated dataset for evaluating the robustness of open semantic mapping and segmentation systems under varying indoor lighting conditions and robot movement dynamics. This dataset is part of [OSMa-Bench](https://be2rlab.github.io/OSMa-Bench/) pipeline.
|
| 16 |
|
|
|
|
|
|
|
| 17 |
## Dataset Summary
|
| 18 |
|
| 19 |
This dataset provides simulated RGB-D and semantically annotated posed sequences for evaluation of semantic mapping and segmentation, with a particular focus on handling dynamic lighting—a critical but often overlooked factor in existing benchmarks. It also includes a collection of automatically generated question–answer pairs across multiple categories to support the evaluation of scene-graph–based reasoning, offering a task-driven measure of how well a system’s reconstructed scene captures semantic relationships between objects.
|
|
|
|
| 52 |
|
| 53 |
---
|
| 54 |
|
| 55 |
+
## Data Structure
|
| 56 |
|
| 57 |
The dataset provides structured data for each scene, suitable for tasks like 3D scene understanding, visual question answering, and robotics. Each scene contains the following components:
|
| 58 |
|
|
|
|
| 92 |
*Example:* `Which is taller: the bookshelf or the lamp?`
|
| 93 |
|
| 94 |
|
| 95 |
+
## Citation
|
| 96 |
|
| 97 |
Using OSMa-Bench dataset in your research? Please cite following paper: [OSMa-Bench arxiv](https://arxiv.org/abs/2503.10331).
|
| 98 |
|