Spaces:
Running on CPU Upgrade

CyberSelfPlay: Building a Cyber Defense Environment
Training Script Link: League (PFSP + PSRO) — Colab (mixed)
Play a gamebased on this environment: Game
Documentation: the math-led overview, full training table, and repository layout are in the project README (and this file links back to it in Where to go next). For the deployed OpenEnv HTTP API, use the live Space app https://harshitshri026-cyberselfplay-env.hf.space with interactive docs at Swagger (/docs) and ReDoc (/redoc).
Why this environment exists
In real-world security operations, impact is not a single model score. It is whether a team can run long incident timelines under uncertainty while adversaries adapt. Industry and government playbooks for detection, containment, and recovery read like multi-step missions, not one-shot classifiers. Yet most agent benchmarks are short-horizon and mostly single-agent. Cyber defense in practice is neither:
- decisions unfold over many steps,
- observations are partial and noisy,
- an attacker adapts while the defender is acting,
- success is not one move, but sustained containment and recovery.
CyberSelfPlay was built to model this gap directly: a stochastic Red-vs-Blue world where Blue must execute mission playbooks while Red applies adversarial pressure.
What makes this direction novel is that we do not treat “good defense” as a single yes/no check. The agent must keep making good choices for many steps in a row, under changing pressure, while mission goals are still active. That combination (multi-step behavior + partial visibility + active adversary + mission constraints) is where many current benchmarks become too easy or unrealistic, and where industry-relevant impact is actually decided.
How this lines up with long-horizon and self-improvement themes
Theme: (super) long-horizon planning and instruction following. Missions are long-running by design: scenarios scale to many instructions and checkpoints, with sparse and delayed rewards from security and mission rubrics. The agent must decompose response goals, track state and playbook progress under partial visibility, and recover from early mistakes over extended trajectories—closer to durable planning than one-shot next responses.
Theme: self-improvement and adaptive curricula. The Red vs. Blue loop is explicit self-play over a defined scenario family. League work (PFSP, PSRO, and mixed) plus round-based GRPO changes the opponent mix and pressure across training, so improvement is not fitting a static list of tasks but recursive capability growth driven by an adaptive curriculum and interaction feedback on the same environment.
What the environment is
CyberSelfPlay is an OpenEnv-compatible two-player environment. Red (attacker) and Blue (defender) share one hidden world state; each step, one side submits a move, the simulator applies it, and the next observation is for that actor. Blue is the policy you typically train; Red can be scripted, pooled, or treated as a league opponent archetype. Episodes are bounded by a scenario-specific turn budget, with termination on exfil success, or on horizon with a win condition tied to mission instruction completion.
Blue chooses from a fixed defender tool set: SIEM and triage, isolation, account controls, secret rotation, patching, hardening, backups, forensics, IOC publishing, and playbook tools such as execute_instruction and checkpoint_plan—each call names a tool_name, an optional target (host or asset), and a params object for tool-specific arguments, plus an optional rationale string. Red uses a separate attacker tool set: recon, enumeration, exploit and credential access, pivoting, persistence, exfil pipeline stages, cover-up, and recovery-plan sabotage. Invalid tools return a non-terminal observation with an error in metadata rather than crashing the session.
- Blue receives partial public state, noisy telemetry, incident summary fields, and rich metadata (reward components, simulator events, POSG metrics, curriculum/scenario tags).
- CyberAction is the OpenEnv
Actiontype: JSON-shaped, validated per side before the simulator runs. - Rewards encode both security outcomes (detect/contain/recover) and mission outcomes (instruction progress/checkpoints/violations), with components exposed for logging and for RL shaping.
Formally, the environment is modeled as a partially observable stochastic game (POSG):
with objective
Near-zero-sum coupling is represented as:
In plain terms: if Red gains ground, Blue usually loses ground, and harmful side effects are also counted. This keeps the game honest and closer to what defenders see in real-world response and the trade-offs that show up in industry debriefs.
Core components
At a high level, the system has:
- Environment core (
cyber_selfplay_env/)- hidden-state simulator and transitions,
- reward rubrics,
- metrics and progress tracking,
- scenario definitions and tool interfaces.
- API server
- OpenEnv endpoints for interaction.
- Training pipelines
- a single-policy path: SFT on demonstration or filtered rollouts, then GRPO on environment reward;
- and a league-based path that uses the same SFT and GRPO machinery: an initial SFT stage, then for each league round a mini-GRPO segment together with PFSP / PSRO (or mixed) opponent meta-updates over Red archetypes or policy pools.
Together, these parts create a full loop: simulate attack/defense interactions, score behavior with mission-aware rewards, then improve the policy using those outcomes.
System figures (open as links or view inline in Colab, diagrams, and repository notebooks): the environment architecture diagram (SVG) shows how the environment, server, and training stack connect; the end-to-end training flow (SVG) summarizes SFT, GRPO, and league training at a glance. Placing the links here matches how engineers skim a project: first the shape of the system, then the pipeline.
Observations, actions, rewards
Observations
Observations are player-local. After each step, the CyberObservation for the active actor includes:
public_state: a partial view of the world. For Blue, this typically includes the simulation time step, a short history of detections, business impact, a coarse incident count, and instruction progress (counts of completed, violated, and total playbook instructions). Red sees a different slice (e.g., limited target hints and detection pressure)—so neither side sees the full state vector.telemetry: a short, possibly noisy list of events (e.g., recent detections for Blue; weak indirect signals for Red), reinforcing partial observability.incident_summary: high-level fields such as termination, winner, exfil status, and time index—usable as a quick situational readout.reward: scalar reward from the previous action (afterreset, typically zero).done: whether the episode has ended.metadata: on successful steps, this carries decomposed reward components, raw events from the simulator, POSG metrics snapshots (e.g., exfil and instruction rates), and curriculum information (scenario name, rolling win rates, episode counts). On invalid actions, metadata may contain an error string instead.
Reset returns an initial Blue observation with scenario/curriculum hints and a note that play alternates between Red and Blue.
Actions
The policy does not mutate the simulator with free text: it must emit a CyberAction: actor ("red" or "blue"), tool_name (must be in that side’s allowed set), target (e.g., host id), params (a dict for tools that need extra fields, such as which capability an execute_instruction step requires), and optional rationale. Red and Blue each have distinct tool vocabularies; the environment validates the tool name before calling the CyberSimulator step logic.
Reward design
The reward law combines dense and delayed signals. The scripts use environment reward as the dominant term, with additional shaping in GRPO training.
Red side:
Blue side:
Why this matters: these equations make it hard to “game” the benchmark with shallow tricks. The agent is pushed toward useful defense behavior across time, not just short-term score spikes.
Training story: what we tried, what failed, what changed
Step 1: Start with SFT -> vanilla GRPO
We started with the direct path:
- Supervised Fine-Tuning (SFT) on heuristic rollouts,
- then Group Relative Policy Optimization (GRPO) using environment reward.
Core GRPO intuition:
Sample a group of completions per prompt, score each completion, compute group-relative advantages, and update policy parameters.
At this point, we had a baseline that could parse actions and follow structure, but behavior quality still depended heavily on exploration quality.
Step 2: We hit mode collapse pressure
During early iterations, action diversity degraded: one tool could dominate generated actions. This reduces effective exploration and hurts credit assignment.
In practice, this looked like “safe but repetitive” behavior: valid JSON, but less tactical variety. The agent was syntactically correct more often than strategically useful.
Step 3: Add stabilization in single-policy GRPO
In the single-policy training path, we introduced shaping aligned with this issue:
- group-level diversity penalty when one tool dominates a batch,
- additional nudge against overusing
execute_instructionwhen SFT bias is high, - continued logging of unique-tools-per-step as a diversity meter.
This improved robustness of training dynamics while keeping environment reward primary.
This step is important because it addresses a common failure mode in small-model RL: if action variety collapses too early, learning plateaus quickly.
Step 4: Move to league training for broader robustness
Single-policy GRPO improved behavior, but robustness against varied attacker styles needed stronger pressure. We then moved to a league-based training loop that still builds on SFT and GRPO—not only meta-game structure. A typical run starts with the same SFT style initialization used in the non-league recipes, then repeats for multiple league rounds: sample or weight Red opponents (PFSP, PSRO, or a mix), build rollouts and prompts in line with the sampled profile, and run a mini-GRPO phase per round on environment reward (with the same family of Unsloth/LoRA/TRL tooling as the vanilla pipeline). PFSP and PSRO (or their combination) update who gets sampled or how policy weights evolve across rounds, while the inner learning signal remains SFT-initialized policy improvement via GRPO under changing opponent pressure. Round-level updates use replicator-style or win-rate-weighted rules so the training mixture stays adaptive.
PFSP weighting:
PSRO-style replicator update:
This made training pressure adaptive across rounds rather than fixed to one opponent profile.
This is where behavior starts to look more “field-like”: the defender is not tuned to one attacker template, but pushed by a moving mixture of attacker styles.
Step 5: Turn logs into evidence, not just numbers
We deliberately kept artifact generation rich (training curves, per-step logs, and combined league histories) so claims can be traced back to concrete run outputs. That makes debugging, comparison, and review much more grounded.
Colab, diagrams, and repository notebooks
The README documents the same training recipes with public Colab links and static curve images (repeated below under Results and evidence). In the repo, the notebook/ directory holds local copies aligned with each recipe.
Environment diagrams (from the README)
These SVGs are the high-level system view and training pipeline, as in the README Environment Architecture and Training Flow sections. You can open each asset directly: architecture (SVG link) · training flow (SVG link).
Architecture
Open architecture diagram in new tab (SVG)

Training flow
Open training flow diagram in new tab (SVG)

Colab notebooks and what each path does
| Method | Open in Colab | Local notebook in notebook/ |
In short |
|---|---|---|---|
| SFT → GRPO (Vanilla) | Open in Colab | SFT_→_GRPO_(Vanilla).ipynb |
Supervised fine-tuning on trajectory-style data, then vanilla GRPO with the environment reward only: the baseline for single-policy learning. |
| SFT → GRPO (Anti-Collapse) | Open in Colab | SFT_→_GRPO_(Anti_Collapse_Regularization).ipynb |
Same SFT + GRPO stack with diversity / anti-collapse regularization so the policy does not collapse to a tiny set of tool actions. |
| League (PFSP) | Open in Colab | League(PFSP).ipynb |
SFT warm-start and per-round mini-GRPO on environment reward, with Prioritized Fictitious Self-Play so Red-style opponents are sampled with matchup-driven weights. |
| League (PSRO) | Open in Colab | League_(PSRO) (1).ipynb |
SFT and GRPO as above, with PSRO-style meta-updates on the opponent or policy pool in addition to league sampling. |
| League (PFSP + PSRO) | Open in Colab | League_(PFSP_+_PSRO).ipynb |
SFT, GRPO, and PFSP + PSRO together: opponent (policy) choice and replicator-style meta-updates in one loop. |
The notebooks mirror the table in the README Training Approaches section; Colab is the shareable run surface, and the notebook/ files are the offline copies in this repository.
Results and evidence
Figures from training runs (same assets as the README)
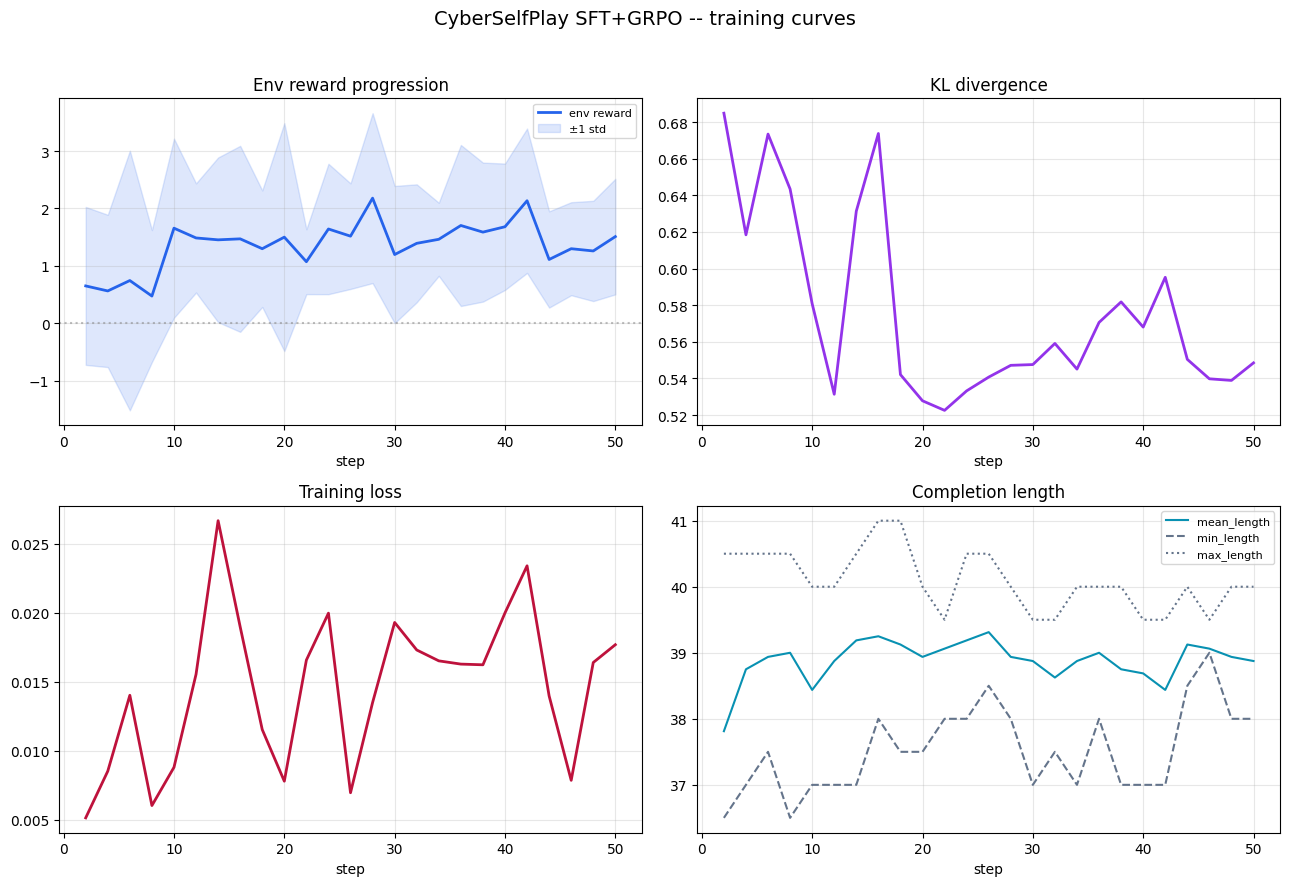
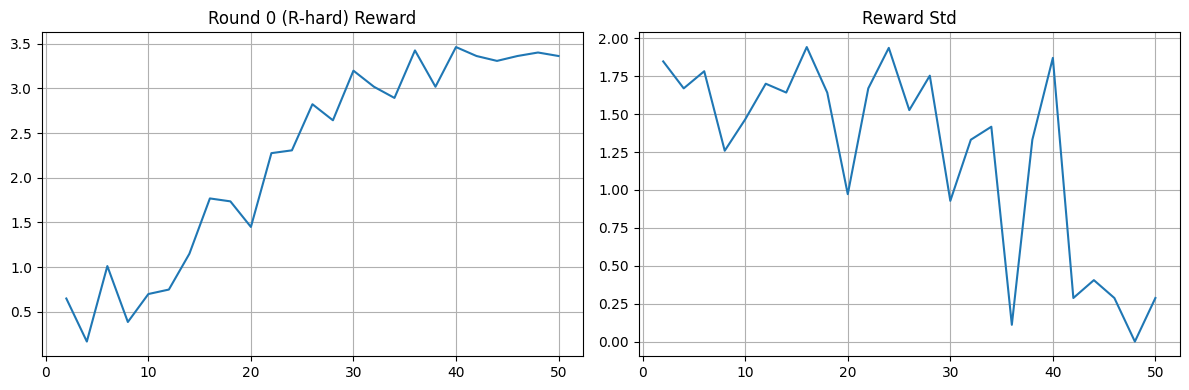
Below are the SFT / GRPO / league curve figures linked from the README’s training table, plus the SFT training loss plot referenced for this write-up. Together they are the main visual evidence for convergence and per-method behavior.
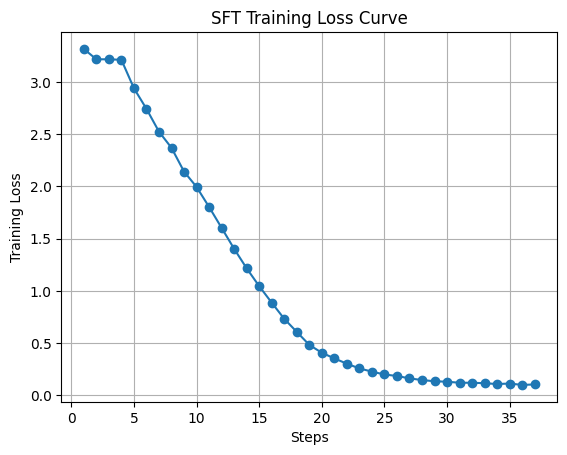
SFT training loss (cross-entropy on expert trajectories). The run shows a clean optimization trajectory: loss starts around 3.2–3.3, stays almost flat for the first few steps, then falls steeply from roughly step 5 through 25. After that the curve flattens: from about step 30 onward training loss sits near 0.1 (steps on the x-axis go up to about 37), which indicates that the SFT stage has found a low-NLL fit on the demonstration data.
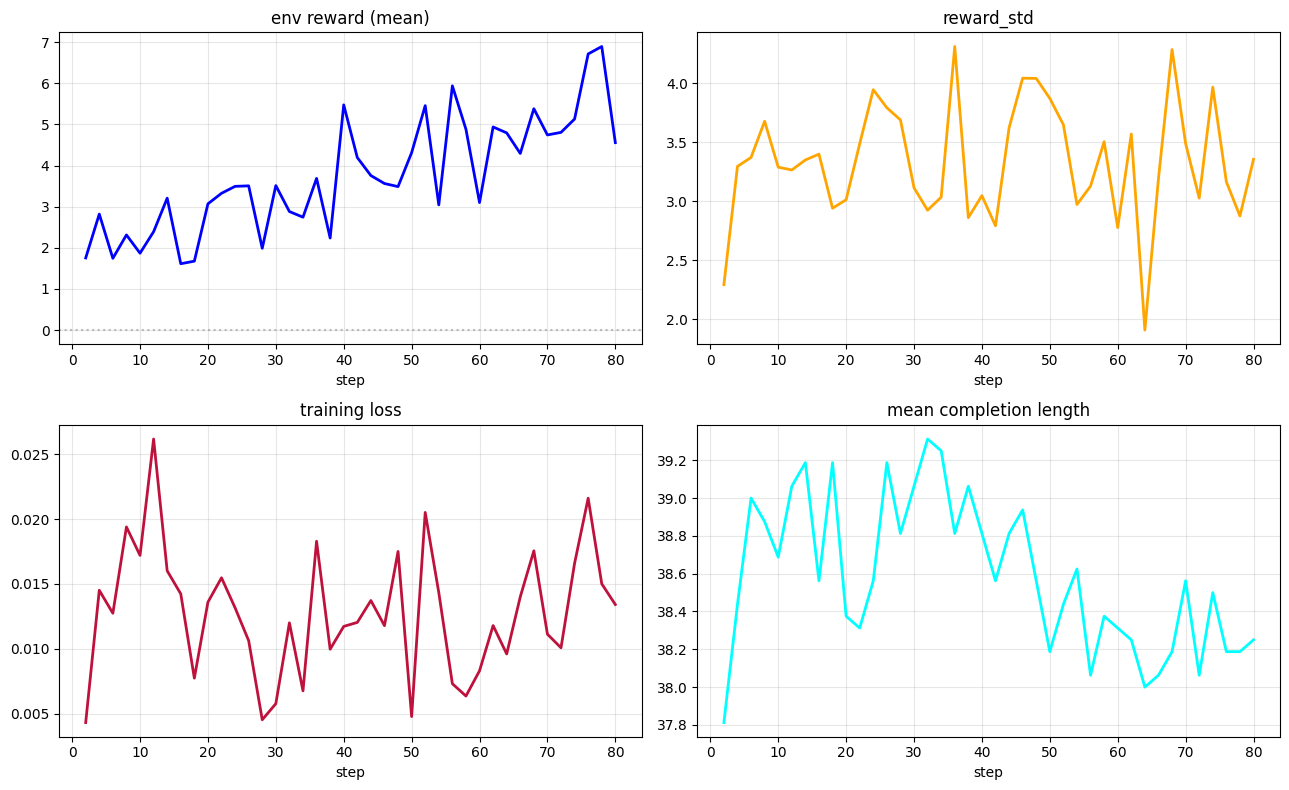
SFT → GRPO (Vanilla).
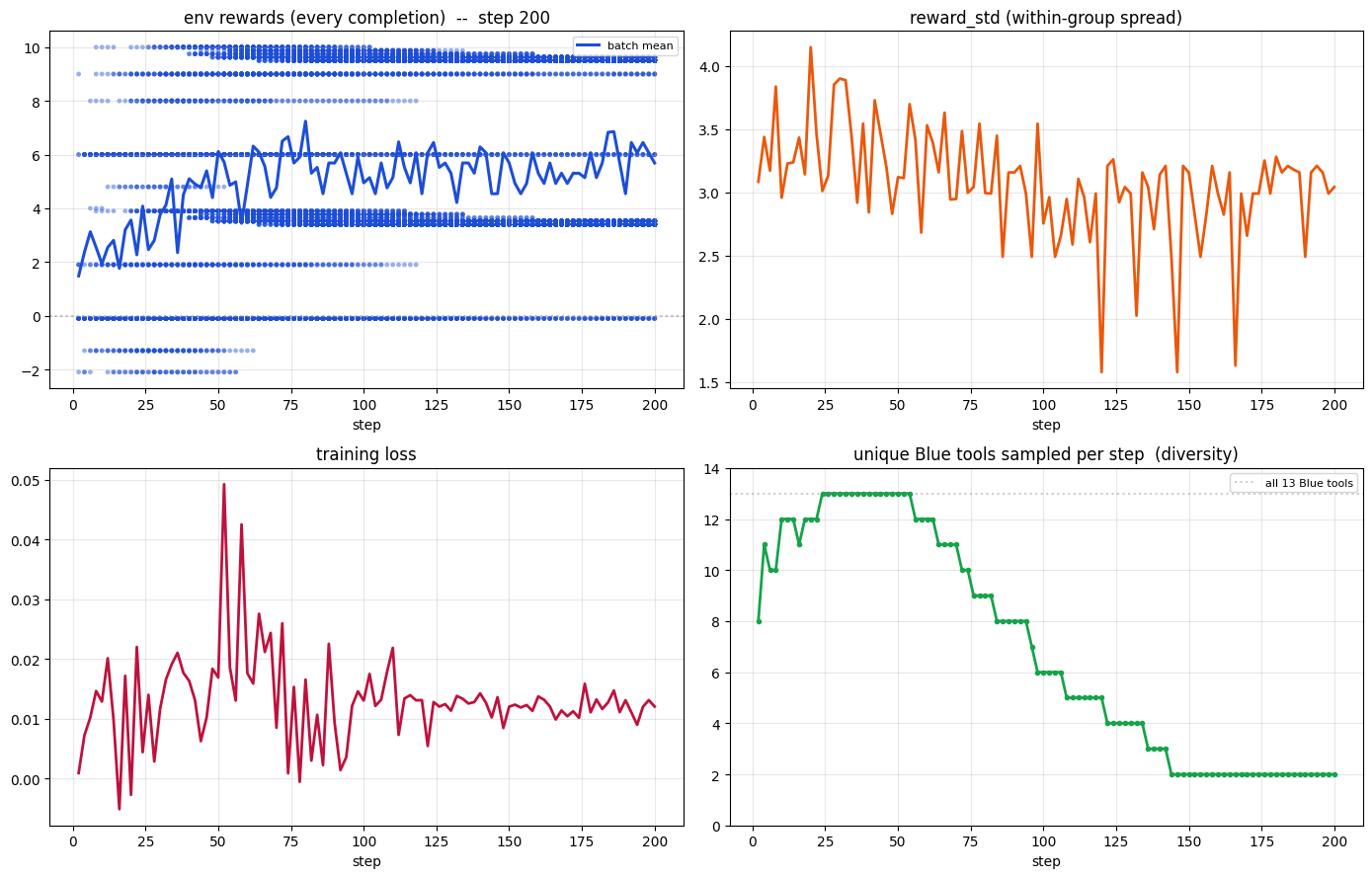
SFT → GRPO (Anti-Collapse).
League (PFSP).
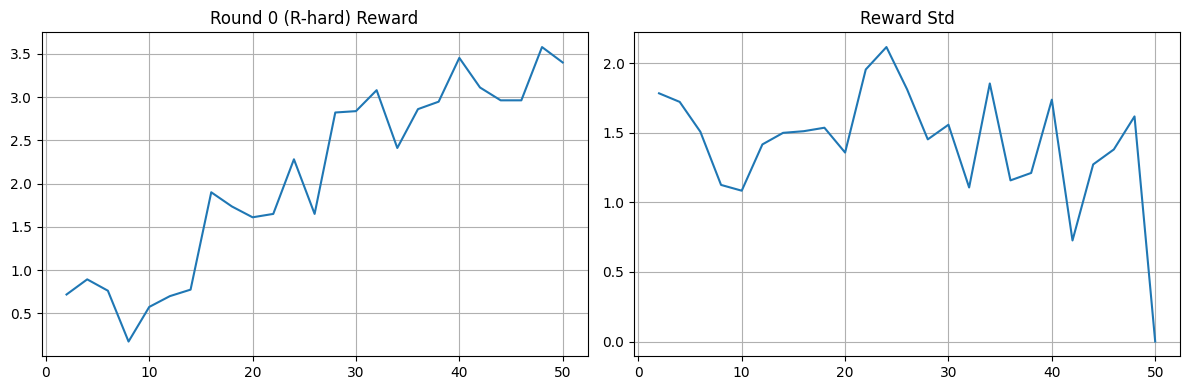
League (PSRO).
League (PFSP + PSRO).
Interpretation in one pass
Across runs, we observe the expected pattern:
- Blue moves from imitation-only behavior (SFT) to stronger reward-aligned behavior after GRPO.
- Diversity shaping reduces collapse and stabilizes learning in single-policy training.
- League mode (PFSP/PSRO/mix) produces richer multi-round dynamics and better robustness across opponent types.
A useful way to read these results is:
- Can the model act in valid structured form? (SFT gives this base)
- Can it improve through interaction feedback? (GRPO gives this climb)
- Can it hold up under varied opponents? (league rounds test this directly)
By the final stage, improvements are not only in average reward but also in consistency across rounds and opponent profiles.
Primary artifacts produced during training:
- consolidated training curves
- full optimization history logs
- per-step reward traces
- per-step behavior snapshots
- league-specific multi-round trend and meta-state reports
These files are the evidence trail for reward trends, variance, action diversity, and round-by-round league behavior.
Why it matters
CyberSelfPlay matters because it evaluates what real defenders need:
- multi-step, instruction-conditioned recovery,
- adversarial interaction under uncertainty,
- measurable progress beyond one-step task completion.
For industry practitioners, it is closer to incident response realities and to how blue teams think about time-to-detect, containment, and recovery.
For researchers, it offers a reproducible testbed for strategic, multi-step agent behavior, with a novel mix of instruction following, tools, and adversarial pressure in one environment.
For teams building defensive copilots or autonomous responders, this kind of environment gives a safer place to test policy behavior before production deployment.
For evaluation-focused work, it provides a bridge between toy tasks and operationally meaningful multi-step scenarios.
Why this submission can stand out
- It tackles a real-world-tilted setting that combines multi-step behavior, partial observability, adversarial play, and mission objectives in one benchmark, which is an unusual and impact-relevant target for the field.
- It does not stop at one training recipe; it shows a full progression from baseline to stabilized training to league pressure, with clear industry-minded artifacts (curves, logs, league history).
- It includes mathematical grounding, system-level structure, and diagram-level novelty in how the stack is presented (see architecture and training flow links in Core components and diagrams), plus artifact-level evidence in one coherent package.
- The narrative from “initial approach -> failure mode -> fix -> stronger method” is explicit and reproducible, which is what teams need to trust deployment-related claims.
Where to go next
- Project README (formal POSG, rewards, training math, and full method table): README.md
- Hugging Face Space (live environment): CyberSelfPlay on Hugging Face — running API: harshitshri026-cyberselfplay-env.hf.space, Swagger
/docs, ReDoc/redoc
The README and this blog point to each other so you can move between the specification-style overview and the narrative plus figures here.