
repo_name stringlengths 9 75 | topic stringclasses 30
values | issue_number int64 1 203k | title stringlengths 1 976 | body stringlengths 0 254k | state stringclasses 2
values | created_at stringlengths 20 20 | updated_at stringlengths 20 20 | url stringlengths 38 105 | labels listlengths 0 9 | user_login stringlengths 1 39 | comments_count int64 0 452 |
|---|---|---|---|---|---|---|---|---|---|---|---|
mirumee/ariadne | graphql | 1,051 | Support passing Python `Enum` directly to `make_executable_schema` | `make_executable_schema` could have two lines of magic that would repack `Enum`s to `ariadne.EnumType(enum.__name__, enum).bind_to_schema(schema)` | closed | 2023-03-17T17:02:54Z | 2023-03-20T12:27:06Z | https://github.com/mirumee/ariadne/issues/1051 | [
"enhancement",
"docs"
] | rafalp | 0 |
aminalaee/sqladmin | sqlalchemy | 181 | Show the form fields in the order of `only` | ### Checklist
- [X] There are no similar issues or pull requests for this yet.
### Is your feature related to a problem? Please describe.
`get_model_form()` receives `only` parameter in `Sequence` but ignores its order to build form fields.
### Describe the solution you would like.
`attributes` should align to t... | closed | 2022-06-16T10:56:08Z | 2022-06-19T08:59:44Z | https://github.com/aminalaee/sqladmin/issues/181 | [] | okapies | 0 |
sebastianruder/NLP-progress | machine-learning | 209 | Semantic parsing / natural language query | It would be really interesting to see a state-of-the-art summary for semantic parsing tasks, like natural-language query into databases. Is that task category too broad to really accommodate comparable metrics? I see [a bunch of papers at stateoftheart.ai](https://www.stateoftheart.ai/?area=Natural%20Language%20Process... | closed | 2019-01-16T02:11:23Z | 2019-01-16T16:27:58Z | https://github.com/sebastianruder/NLP-progress/issues/209 | [] | gthb | 2 |
fastapi/sqlmodel | sqlalchemy | 249 | Create Relationships with Unique Fields (UniqueViolationError) | ### First Check
- [X] I added a very descriptive title to this issue.
- [X] I used the GitHub search to find a similar issue and didn't find it.
- [X] I searched the SQLModel documentation, with the integrated search.
- [X] I already searched in Google "How to X in SQLModel" and didn't find any information.
- [X... | closed | 2022-02-23T17:02:05Z | 2022-03-02T14:08:42Z | https://github.com/fastapi/sqlmodel/issues/249 | [
"question"
] | njdowdy | 11 |
microsoft/MMdnn | tensorflow | 694 | Transfer from keras to caffe 【error forSeparableConv 】 | Platform (like ubuntu 16.04/win10):ubuntu 16.04
Python version:python2.7.12
Source framework with version (like Tensorflow 1.4.1 with GPU):keras 2.2.4
Destination framework with version (like CNTK 2.3 with GPU):caffe
Pre-trained model path (webpath or webdisk path):
Running scripts:
mmconvert -sf keras ... | open | 2019-07-12T09:50:49Z | 2020-06-24T01:09:25Z | https://github.com/microsoft/MMdnn/issues/694 | [] | zys1994 | 1 |
InstaPy/InstaPy | automation | 6,630 | No way to create posts? | <!-- Did you know that we have a Discord channel ? Join us: https://discord.gg/FDETsht -->
<!-- Is this a Feature Request ? Please, check out our Wiki first https://github.com/timgrossmann/InstaPy/wiki -->
## Expected Behavior
I would think that an Instagram automation library as comprehensive as this one would have... | closed | 2022-07-07T02:27:52Z | 2022-08-16T21:50:37Z | https://github.com/InstaPy/InstaPy/issues/6630 | [] | kaijif | 1 |
zappa/Zappa | django | 440 | [Migrated] Using Extra Cloundfront Distro to Restrict TLS Protocol and Ciphers? | Originally from: https://github.com/Miserlou/Zappa/issues/1154 by [Erstwild](https://github.com/Erstwild)
I have been working on trying create a "regulated industry" deployment of Zappa. I have one issue open on putting the DynamoDB instance in a VPC. The other I have been working on with AWS is trying to find the b... | closed | 2021-02-20T08:34:52Z | 2024-04-13T16:17:58Z | https://github.com/zappa/Zappa/issues/440 | [
"no-activity",
"auto-closed"
] | jneves | 2 |
plotly/dash-bio | dash | 711 | Browser scrolls and zooms simultaniously NglMoleculeViewer | I am talking about the dash_bio.NglMolecule.Viewer here:
The browser is scrolling down when the mouse is in the window of the viewer, therefore the browser scrolls simultaniously when zooming into or out of the viewer.
I was told by the original developer that this could be an easy fix by overwriting the `stage.m... | open | 2022-11-16T08:36:05Z | 2022-11-16T10:20:35Z | https://github.com/plotly/dash-bio/issues/711 | [] | Ento0n | 1 |
nerfstudio-project/nerfstudio | computer-vision | 2,862 | TypeError: __init__() got an unexpected keyword argument 'dataparser' | **Describe the bug**
After installing and setting up the environment, I run the example command `ns-train nerfacto --data data/nerfstudio/poster` and then got the following error.
It worked without error two weeks ago, so I am not sure whether it is due to some inconsistency between versions.
**To Reproduce**
S... | closed | 2024-02-01T15:58:27Z | 2024-02-01T21:45:19Z | https://github.com/nerfstudio-project/nerfstudio/issues/2862 | [] | RuihanGao | 6 |
python-restx/flask-restx | flask | 193 | Why was the changelog removed from the repository and the documentation? | **Ask a question**
Why was the changelog removed from the repository and the documentation?
**Additional context**
Hi, I was looking at trying to move a project from flask_restplus==0.10.1 to restx but had a hard time figuring out what had changed. The docs say that is it mostly compatible with restplus but that i... | open | 2020-08-07T16:17:54Z | 2020-09-02T18:48:40Z | https://github.com/python-restx/flask-restx/issues/193 | [
"question"
] | avilaton | 3 |
babysor/MockingBird | deep-learning | 204 | 使用新語料 toolbox inference錯誤 | 最近使用了一個新的語料庫去訓練synthesizer(沒有使用作者提供的語料),訓練格式都沒有改。但是將模型拿去toolbox做inference的時候遇到下列的錯誤。
`Feel free to add your own. You can still use the toolbox by recording samples yourself.
Loaded encoder "pretrained.pt" trained to step 1564501
Synthesizer using device: cpu
Trainable Parameters: 30.875M
Traceback (most recent c... | open | 2021-11-09T07:27:15Z | 2021-11-09T13:10:05Z | https://github.com/babysor/MockingBird/issues/204 | [] | gaga820402 | 1 |
pydata/xarray | pandas | 9,815 | Test failure on RISC-V platform | ### What happened?
I am a Fedora packager
When I run pytest on the RISC-V platform, I got four failures
### What did you expect to happen?
_No response_
### Minimal Complete Verifiable Example
```Python
pytest xarray/tests/test_backends.py::TestNetCDF4ViaDaskData::test_roundtrip_mask_and_scale
pytest ... | open | 2024-11-24T10:21:51Z | 2025-02-16T18:37:58Z | https://github.com/pydata/xarray/issues/9815 | [
"bug",
"needs triage"
] | U2FsdGVkX1 | 14 |
InstaPy/InstaPy | automation | 6,628 | Not working view-source:https://freegeoip.app/json | <!-- Did you know that we have a Discord channel ? Join us: https://discord.gg/FDETsht -->
<!-- Is this a Feature Request ? Please, check out our Wiki first https://github.com/timgrossmann/InstaPy/wiki -->
## Expected Behavior
Log in
## Current Behavior
Im tryng to login but, the request to get the ip it doesn't w... | open | 2022-07-02T19:19:10Z | 2022-11-23T05:38:17Z | https://github.com/InstaPy/InstaPy/issues/6628 | [] | Arwiim | 2 |
flairNLP/flair | pytorch | 2,887 | issue loading MultiTagger (unpickling error) | I am using Hunflair and having below error while running it: Can anyone suggest me the next step?
Traceback (most recent call last):
File "hunflair.py", line 35, in <module>
hunflair = MultiTagger.load("hunflair")
File "/home/sgu260/.local/lib/python3.8/site-packages/flair/models/sequence_tagger_model.py"... | closed | 2022-08-05T18:49:56Z | 2023-01-07T13:48:14Z | https://github.com/flairNLP/flair/issues/2887 | [
"question",
"wontfix"
] | shashank140195 | 1 |
huggingface/datasets | computer-vision | 7,357 | Python process aborded with GIL issue when using image dataset | ### Describe the bug
The issue is visible only with the latest `datasets==3.2.0`.
When using image dataset the Python process gets aborted right before the exit with the following error:
```
Fatal Python error: PyGILState_Release: thread state 0x7fa1f409ade0 must be current when releasing
Python runtime state: f... | open | 2025-01-06T11:29:30Z | 2025-03-08T15:59:36Z | https://github.com/huggingface/datasets/issues/7357 | [] | AlexKoff88 | 1 |
mlfoundations/open_clip | computer-vision | 2 | Avenue for exploration - augmenting training set with colour palettes / texture names /more meta data | so part of the fun with clip is using it in conjunction with VQGAN.
This allows the prompts to generate images.
There's something lost in this translation. though .
They say a picture is worth a 1000 words - but what if some extra data was injected into the training ?
could be say textures / maybe even g... | closed | 2021-07-30T11:03:50Z | 2021-07-30T19:52:20Z | https://github.com/mlfoundations/open_clip/issues/2 | [] | johndpope | 1 |
SciTools/cartopy | matplotlib | 2,088 | cartopy crashes with 0.21.0 | Hi,
The simplest cartopy script crashes when cartopy is installed at 0.21.0 release
with a pip install cartopy==0.21.0
```
import cartopy.crs as ccrs
import matplotlib.pyplot as plt
ax = plt.axes(projection=ccrs.PlateCarree())
ax.coastlines()
plt.show()
```
produces a core.
Concerned installed modules ... | closed | 2022-09-26T17:57:56Z | 2022-09-27T07:35:54Z | https://github.com/SciTools/cartopy/issues/2088 | [] | PBrockmann | 2 |
Lightning-AI/pytorch-lightning | pytorch | 20,276 | Lightning place model inputs and model to different devices | ### Bug description
In the following code snippet, `lmm` is a class inherited from `nn.Module` which is a wrapper class huggingface model and processor.
```
class ICVModel(pl.LightningModule):
def __init__(self, lmm, icv_encoder: torch.nn.Module) -> None:
super().__init__()
self.lmm = lmm
... | closed | 2024-09-12T13:27:39Z | 2025-02-13T06:46:52Z | https://github.com/Lightning-AI/pytorch-lightning/issues/20276 | [
"bug",
"needs triage",
"ver: 2.4.x"
] | Kamichanw | 6 |
pallets/flask | flask | 4,553 | asserts with `pytest.raises` should be outside the `with` block | I've been using Flask's test suite to evaluate our [Slipcover](https://github.com/plasma-umass/slipcover) coverage tool and noticed likely bugs in the Flask tests. For example, in `tests/test_basic.py`, you have
```python
def test_response_type_errors():
[...]
with pytest.raises(TypeError) as e:
... | closed | 2022-04-27T15:30:57Z | 2022-05-14T00:07:22Z | https://github.com/pallets/flask/issues/4553 | [
"testing"
] | jaltmayerpizzorno | 2 |
microsoft/unilm | nlp | 1,224 | Doubts about the MARIO-LAION dataset | **Describe**
Model I am using TextDiffuser:
I found that there are some index numbers starting with "50001" in the MARIO-LAION dataset, but I did not find the corresponding subfolder in the meta information (40G) file.
... | open | 2023-07-26T06:55:16Z | 2024-02-03T16:02:57Z | https://github.com/microsoft/unilm/issues/1224 | [] | scutyuanzhi | 3 |
ultralytics/yolov5 | machine-learning | 13,144 | How to increase FPS camera capture inside the Raspberry Pi 4B 8GB with best.onnx model | ### Search before asking
- [X] I have searched the YOLOv5 [issues](https://github.com/ultralytics/yolov5/issues) and found no similar bug report.
### YOLOv5 Component
Detection
### Bug
Hi, i am currently trying to make traffic sign detection and recognition by using the YOLOv5 Pytorch with Yolov5s model. I am usi... | open | 2024-06-27T21:16:08Z | 2024-10-20T19:49:02Z | https://github.com/ultralytics/yolov5/issues/13144 | [
"bug",
"Stale"
] | Killuagg | 13 |
ageitgey/face_recognition | python | 1,312 | Details of face_encodings() function | * face_recognition version:1.3.0
* Python version:3.x
* Operating System:linux
### Description
Actually this is not an issue, rather an effort to know the details of 'face_encondings()' function.
### What I Did
so in the examples in Markdown file, you always take very first list of returned multiple lists. ... | closed | 2021-05-12T17:47:29Z | 2021-05-22T19:25:09Z | https://github.com/ageitgey/face_recognition/issues/1312 | [] | AI-07 | 1 |
allenai/allennlp | pytorch | 4,971 | Failed to import WordTokenizer | Hello, I'm using Allennlp 1.4.0 and Allen-model 1.4.0 on my proiect. I run the command as `allennlp serve --archive-path <path> --predictor <predictor> --include-package <pacakge_name>`. And then I got an error of `Failed to import WordTokenizer from allennlp.data.tokenizers.word_tokenizer`.
I've looked at the Word... | closed | 2021-02-11T13:30:16Z | 2021-02-26T20:17:15Z | https://github.com/allenai/allennlp/issues/4971 | [
"question"
] | yanchao-yu | 3 |
piccolo-orm/piccolo | fastapi | 221 | Naming of columns | ### Discussed in https://github.com/piccolo-orm/piccolo/discussions/206
Allow ``Table`` columns to map to database columns with different names.
For example:
```python
class MyTable(Table):
name = Varchar(name="person_name")
```
In the example above, when doing queries, you will use `MyTable.name`, b... | closed | 2021-09-08T09:31:14Z | 2021-10-05T20:10:21Z | https://github.com/piccolo-orm/piccolo/issues/221 | [
"enhancement"
] | dantownsend | 7 |
matterport/Mask_RCNN | tensorflow | 2,906 | Training balloon.py ValueError: Expected a symbolic Tensors or a callable for the loss value. Please wrap your loss computation in a zero argument `lambda`. | python==3.7.15
tensorflow==2.10.0
keras==2.10.0
".\Mask_RCNN\mrcnn\model.py"
```
# Add L2 Regularization
# Skip gamma and beta weights of batch normalization layers.
reg_losses = [keras.regularizers.l2(self.config.WEIGHT_DECAY)(w) / tf.cast(tf.size(w), tf.float32)
... | open | 2022-11-14T23:42:10Z | 2023-02-14T04:09:32Z | https://github.com/matterport/Mask_RCNN/issues/2906 | [] | sanso62 | 2 |
AUTOMATIC1111/stable-diffusion-webui | pytorch | 16,130 | [Bug]: weird>launch.py: error: unrecognized arguments: --lora-dir | ### Checklist
- [ ] The issue exists after disabling all extensions
- [X] The issue exists on a clean installation of webui
- [ ] The issue is caused by an extension, but I believe it is caused by a bug in the webui
- [X] The issue exists in the current version of the webui
- [x] The issue has not been reported before... | closed | 2024-07-02T15:44:24Z | 2024-07-06T13:49:17Z | https://github.com/AUTOMATIC1111/stable-diffusion-webui/issues/16130 | [
"bug-report"
] | hgftrdw45ud67is8o89 | 2 |
Nike-Inc/koheesio | pydantic | 166 | [BUG] Snowflake sync task for insert Change Data Feed is not working in case of existing row in snowflake already | ## Describe the bug
The issue is in the line https://github.com/Nike-Inc/koheesio/blob/720da7a12d4b8b49de4367bf051007175c2af5cb/src/koheesio/integrations/spark/snowflake.py#L973, which leads to the case of skipping updates if the `change_type` is 'insert' and the row is present in Snowflake (in case of delete and inse... | open | 2025-02-06T23:20:12Z | 2025-02-26T13:34:57Z | https://github.com/Nike-Inc/koheesio/issues/166 | [
"bug"
] | mikita-sakalouski | 0 |
streamlit/streamlit | machine-learning | 10,648 | adding the help parameter to a (Button?) widget pads it weirdly instead of staying to the left. | ### Checklist
- [x] I have searched the [existing issues](https://github.com/streamlit/streamlit/issues) for similar issues.
- [x] I added a very descriptive title to this issue.
- [x] I have provided sufficient information below to help reproduce this issue.
### Summary
```python
st.page_link('sub_pages/resources/l... | closed | 2025-03-05T09:56:06Z | 2025-03-07T21:21:05Z | https://github.com/streamlit/streamlit/issues/10648 | [
"type:bug",
"status:confirmed",
"priority:P1",
"feature:st.download_button",
"feature:st.button",
"feature:st.link_button",
"feature:st.page_link"
] | thehamish555 | 2 |
PaddlePaddle/models | nlp | 4,803 | DCGAN的自定义数据集应该做成什么样的格式 | open | 2020-08-16T11:52:38Z | 2024-02-26T05:10:28Z | https://github.com/PaddlePaddle/models/issues/4803 | [] | xiaolifeimianbao | 3 | |
ultralytics/ultralytics | pytorch | 19,553 | Build a dataloader without training | ### Search before asking
- [x] I have searched the Ultralytics YOLO [issues](https://github.com/ultralytics/ultralytics/issues) and [discussions](https://github.com/orgs/ultralytics/discussions) and found no similar questions.
### Question
Hi. I would like to examine data in a train dataloader. How can I build one ... | closed | 2025-03-06T12:17:34Z | 2025-03-06T14:01:49Z | https://github.com/ultralytics/ultralytics/issues/19553 | [
"question",
"dependencies",
"detect"
] | daniellehot | 3 |
babysor/MockingBird | deep-learning | 90 | UnicodeEncodeError: 'charmap' codec can't encode characters in position 7-13: character maps to <undefined> | 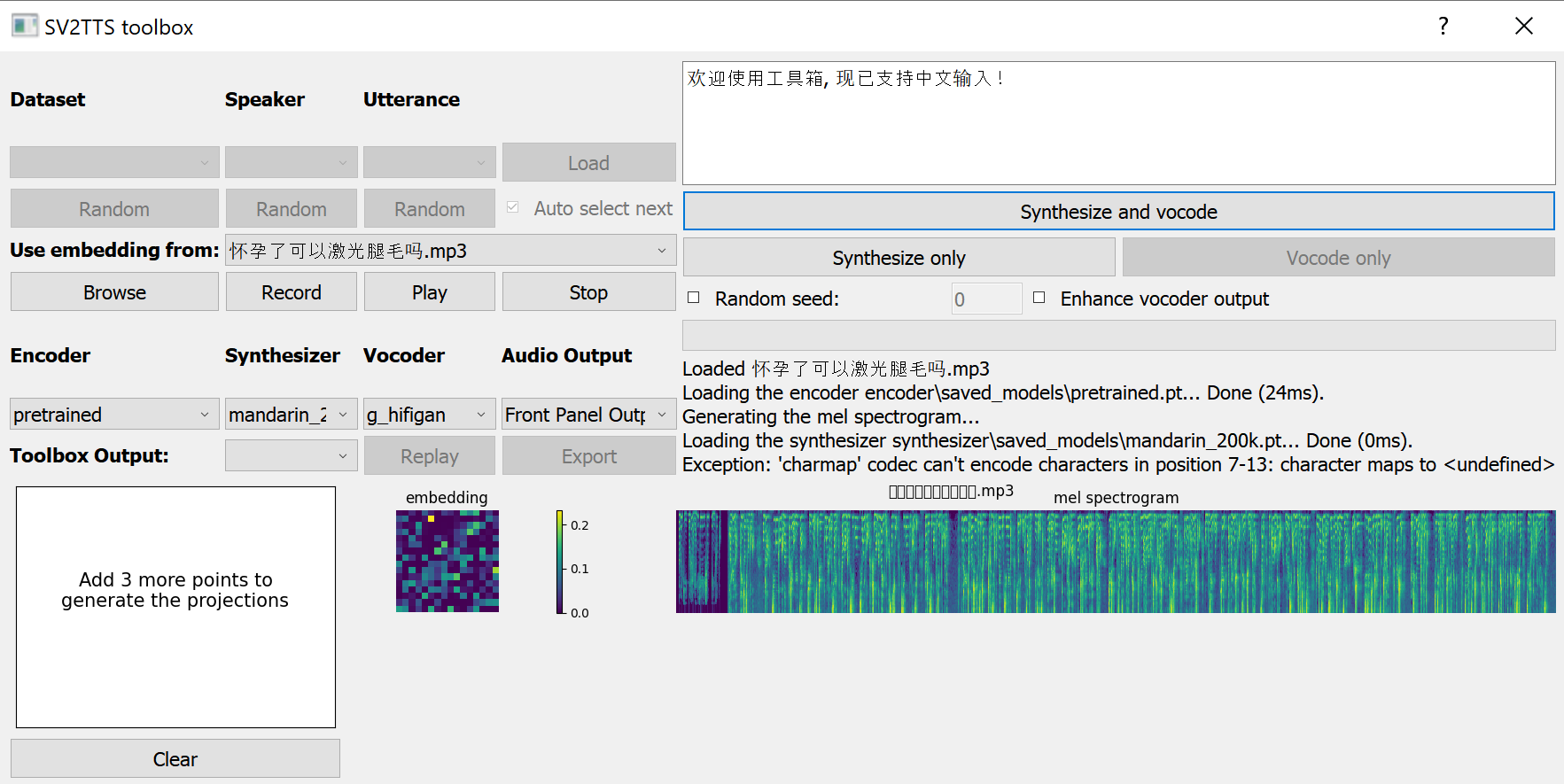
您好,请问这个问题如何解决?貌似卡在Synthesizer的模型那一步,可是我两个模型都试了都是同一个问题? | closed | 2021-09-20T08:07:56Z | 2021-09-21T02:17:53Z | https://github.com/babysor/MockingBird/issues/90 | [] | Udaroth | 4 |
PaddlePaddle/models | computer-vision | 4,890 | TSM 模型对视频分类时,如何传入一个文件夹路径 | closed | 2020-09-28T08:32:16Z | 2020-09-28T09:06:17Z | https://github.com/PaddlePaddle/models/issues/4890 | [] | yy2yy | 0 | |
simple-login/app | flask | 1,560 | Use minimal permissions | ## Prerequisites
- [x] I have searched open and closed issues to make sure that the bug has not yet been reported.
## Bug report
**Describe the bug**
This extension intended to preserve privacy requests "Read and change all your data on all sites".
**Expected behavior**
A privacy-focused extension should be... | closed | 2023-02-02T01:32:07Z | 2023-02-03T15:04:29Z | https://github.com/simple-login/app/issues/1560 | [] | wrycu | 2 |
deepspeedai/DeepSpeed | deep-learning | 6,605 | [REQUEST] Inquiry about code for Domino | I saw in [Domino](https://arxiv.org/pdf/2409.15241) that the code would be released here. Could you let me know when will the code be released to the public?
| closed | 2024-10-07T23:04:46Z | 2025-02-05T23:48:33Z | https://github.com/deepspeedai/DeepSpeed/issues/6605 | [
"enhancement"
] | s1ghhh | 5 |
PaddlePaddle/models | nlp | 4,833 | 已解决 | closed | 2020-09-03T03:12:17Z | 2020-09-03T07:32:16Z | https://github.com/PaddlePaddle/models/issues/4833 | [] | kyuer | 0 | |
Anjok07/ultimatevocalremovergui | pytorch | 1,232 | ValueError when using MDX-Net Process Method | Last Error Received:
Process: MDX-Net
If this error persists, please contact the developers with the error details.
Raw Error Details:
ValueError: "all the input array dimensions for the concatenation axis must match exactly, but along dimension 0, the array at index 0 has size 2 and the array at index 1 ha... | open | 2024-03-08T10:56:02Z | 2024-03-08T10:56:02Z | https://github.com/Anjok07/ultimatevocalremovergui/issues/1232 | [] | shivammetimbers | 0 |
proplot-dev/proplot | matplotlib | 456 | MatplotlibDeprecationWarning: savefig() got unexpected keyword argument "facecolor" which is no longer supported as of 3.3 and will become an error two minor releases later |
### Description
A deprecation warning with savefig() has been displayed for a long time and has not been solved.
/Users/yk/anaconda3/lib/python3.11/site-packages/proplot/figure.py:469: MatplotlibDeprecationWarning: savefig() got unexpected keyword argument "facecolor" which is no longer supported as of 3.3 and... | open | 2024-05-21T07:01:00Z | 2024-08-16T09:04:18Z | https://github.com/proplot-dev/proplot/issues/456 | [] | yykphy | 1 |
AirtestProject/Airtest | automation | 720 | auto_setup()函数中compress参数默认值设置错误 | airtest.core.api 的 auto_setup()函数中compress参数默认值设置错误
compress的默认值设定为0
但是其有效值域为 1-100
| closed | 2020-04-14T12:11:43Z | 2020-04-15T01:59:02Z | https://github.com/AirtestProject/Airtest/issues/720 | [] | lincoln987 | 1 |
CorentinJ/Real-Time-Voice-Cloning | python | 1,119 | fd 3 failed with permission denied | 
| closed | 2022-09-26T07:24:43Z | 2023-01-08T08:55:13Z | https://github.com/CorentinJ/Real-Time-Voice-Cloning/issues/1119 | [] | mikemills254 | 0 |
mlfoundations/open_clip | computer-vision | 240 | Naming clash in new CLIP models | I just cloned this repository on a Windows computer and saw the following:
```
PS C:\Users\585491\documents\research> git clone https://github.com/mlfoundations/open_clip.git
Cloning into 'open_clip'...
remote: Enumerating objects: 1637, done.
remote: Counting objects: 100% (74/74), done.
remote: Compressing ob... | closed | 2022-11-21T16:04:43Z | 2022-11-27T23:47:06Z | https://github.com/mlfoundations/open_clip/issues/240 | [] | StellaAthena | 11 |
ultrafunkamsterdam/undetected-chromedriver | automation | 1,489 | driver_executable_path is not working | 
Error:

The Chrome driver version in the location mentioned in... | open | 2023-08-17T18:31:08Z | 2023-08-17T19:39:46Z | https://github.com/ultrafunkamsterdam/undetected-chromedriver/issues/1489 | [] | odddkidout | 1 |
hankcs/HanLP | nlp | 651 | 可以有自定义停词库吗 | 最新版本可以使用自定义词库,不知道是否支持自定义停词库。试了一下直接在配置文件中停词path后面加路径不支持 | closed | 2017-10-16T07:22:00Z | 2020-01-01T10:52:13Z | https://github.com/hankcs/HanLP/issues/651 | [
"ignored"
] | caleben | 2 |
twelvedata/twelvedata-python | matplotlib | 90 | [Feature Request] add validation for api key | **Is your feature request related to a problem? Please describe.**
when i tried my api key accidentally passed a `None` value and it didn't throw an error.
**Describe the solution you'd like**
throw an error or alert.
**Describe alternatives you've considered**
i fixed the issue.
**Additional context**
... | closed | 2024-09-28T02:59:29Z | 2024-09-28T03:18:20Z | https://github.com/twelvedata/twelvedata-python/issues/90 | [] | AzulGarza | 1 |
deepspeedai/DeepSpeed | deep-learning | 5,779 | how to set "training_step" during training? | **Describe the bug**
I use zero1 to train a unet network with the following deepspeed_config configuration. I set 10 epochs and the output during training is as follows:
```json
{
"train_micro_batch_size_per_gpu": 1,
"gradient_accumulation_steps": 1,
"local_rank": 0,
"steps_per_pr... | closed | 2024-07-17T12:11:02Z | 2024-10-11T16:26:42Z | https://github.com/deepspeedai/DeepSpeed/issues/5779 | [
"bug",
"training"
] | qwerfdsadad | 3 |
albumentations-team/albumentations | deep-learning | 1,807 | Fix available keys | We need some checks to be sure that propper targets are sent to the Compose.
Possible scenarious
- [x] `strict=True`
`ImageOnly`
will not trigger on
- `image`
- `mask`
- `masks`
- `bboxes` if bboxParams is specified
- `keypoints` if KeypointParams is specified
- parameters specified in transf... | closed | 2024-06-19T23:46:43Z | 2024-06-22T17:39:11Z | https://github.com/albumentations-team/albumentations/issues/1807 | [
"bug"
] | ternaus | 0 |
krish-adi/barfi | streamlit | 48 | Color of the Flow background and the Edges | Hi Aditya,
Hope you're well.
Have a Question, is there any way to apply the CSS code on the flow to change the look and feel of it?
| closed | 2025-02-03T09:23:36Z | 2025-02-04T07:11:32Z | https://github.com/krish-adi/barfi/issues/48 | [] | abrarzahoor004 | 1 |
ets-labs/python-dependency-injector | flask | 795 | Singleton provider throws RuntimeError: Task got bad yield for generators | When a generator is provided by `Factory`, I can inject my dependency synchronously, and **example_1** below works as expected. When a generator is provided by `Singleton`, I experience forced asynchronous behavior (why do I get that?) and encounter a *bad yield exception* (see **example_2** below).
Does anyone know... | open | 2024-04-22T09:09:31Z | 2024-11-13T19:48:44Z | https://github.com/ets-labs/python-dependency-injector/issues/795 | [] | jonaslalin | 1 |
simple-login/app | flask | 1,969 | Block registration with maskmy.id (it is violating ToS) | Provider is https://skiff.com/quick-alias and it's actually subdomains, each user can generate their own subdomain. I tested it, very easy.
The page title of https://skiff.com/quick-alias is "Quick alias burner email address". In the HTML I see
```
<meta name="description" content="Secure and quick-to-create bur... | closed | 2023-12-12T22:02:38Z | 2024-01-03T12:59:12Z | https://github.com/simple-login/app/issues/1969 | [] | ghost | 5 |
apachecn/ailearning | python | 593 | Python3 | Can the code be updated to fit Python3? | closed | 2020-05-21T07:55:17Z | 2021-09-07T17:44:54Z | https://github.com/apachecn/ailearning/issues/593 | [] | Harvey9610 | 1 |
streamlit/streamlit | deep-learning | 10,843 | The button type parameter causes the button function to be invalid | ### Checklist
- [x] I have searched the [existing issues](https://github.com/streamlit/streamlit/issues) for similar issues.
- [x] I added a very descriptive title to this issue.
- [x] I have provided sufficient information below to help reproduce this issue.
### Summary
When I set the type parameter as a variable, ... | closed | 2025-03-19T11:35:06Z | 2025-03-24T17:58:18Z | https://github.com/streamlit/streamlit/issues/10843 | [
"type:bug",
"priority:P3",
"feature:st.button"
] | lkdd-ao | 3 |
darrenburns/posting | automation | 113 | Importing from an openapi file doesn't override deleted endpoints | When running `posting import path/to/openapi.{yaml,json}` new endpoints are registered but deleted ones stay in place. | closed | 2024-09-27T18:15:00Z | 2024-11-18T17:17:53Z | https://github.com/darrenburns/posting/issues/113 | [] | StitiFatah | 1 |
coleifer/sqlite-web | flask | 39 | Edit with Spreadsheet UI | I've been looking for a hosted alternative to Google Sheets, for relatively small datasets. If a table could be edited like a spreadsheet, this would certainly be a candidate.
I know this opens up a whole can of worms on the concurrent editing side of things, but at least for our use case it would be fine to simply ... | closed | 2018-03-07T10:52:39Z | 2023-04-18T15:39:59Z | https://github.com/coleifer/sqlite-web/issues/39 | [] | mbarkhau | 2 |
tensorlayer/TensorLayer | tensorflow | 1,002 | A Writing errors | There may be a writing error in https://github.com/tensorlayer/tensorlayer/blob/master/examples/text_generation/tutorial_generate_text.py
line 250
: ‘train_weights = net.weights’ , I think this should be changed to ‘train_weights=net.trainable_weights’,Otherwise, the program will report errors on my computer.
... | closed | 2019-06-14T06:03:02Z | 2019-06-14T06:31:34Z | https://github.com/tensorlayer/TensorLayer/issues/1002 | [] | veraanddamao | 2 |
kymatio/kymatio | numpy | 347 | ENH warning when making doc | fresh clone + cd doc + make html leads to:
"WARNING: could not relabel citation reference [paper]"
I'm not sure what's the issue. | closed | 2019-02-24T20:29:37Z | 2019-02-25T19:15:40Z | https://github.com/kymatio/kymatio/issues/347 | [
"bug",
"doc"
] | edouardoyallon | 2 |
waditu/tushare | pandas | 1,374 | pro api: stock_basic接口缺少000670这只股票 | stock_basic接口,无论传入参数为L,D还是P,都没有000670这只股票。
id: 370310 | open | 2020-06-12T03:45:16Z | 2020-07-15T15:39:07Z | https://github.com/waditu/tushare/issues/1374 | [] | tomjamescn | 1 |
home-assistant/core | python | 141,120 | Roborock: Not setting up P20 Pro because the coordinator failed to get data for the first time using the offline client | ### The problem
is there a way to avoid the download of map data?
### What version of Home Assistant Core has the issue?
core-2025.3.4
### What was the last working version of Home Assistant Core?
_No response_
### What type of installation are you running?
Home Assistant OS
### Integration causing the issue
r... | open | 2025-03-22T15:51:13Z | 2025-03-23T15:32:39Z | https://github.com/home-assistant/core/issues/141120 | [
"needs-more-information",
"integration: roborock"
] | giorgiopogliani | 8 |
ray-project/ray | deep-learning | 50,883 | [Serve] Ray Serve APIs for users to define when the Ray Serve applications are ready to serve requests | ### Description
It'd be useful for the Ray Serve API to allow users to configure settings such as custom timeouts for when applications are ready to serve requests.
### Use case
This would be useful for scenarios such as: https://github.com/ray-project/enhancements/pull/58#discussion_r1968439611, where a large numbe... | open | 2025-02-25T03:39:23Z | 2025-02-25T17:29:47Z | https://github.com/ray-project/ray/issues/50883 | [
"enhancement",
"triage",
"serve"
] | ryanaoleary | 0 |
babysor/MockingBird | deep-learning | 683 | 请教大佬,现在一分钟跑一个,怎么提升速度呢?(附截图) | 
| closed | 2022-07-27T18:54:54Z | 2022-07-28T11:36:03Z | https://github.com/babysor/MockingBird/issues/683 | [] | yunqi777 | 1 |
gradio-app/gradio | deep-learning | 10,867 | Documentation for gr.Interface cache_examples is incorrect | ### Describe the bug
The documentation for gr.Interface cache_examples says:
> In HuggingFace Spaces, this parameter is True (as long as `fn` and `outputs` are also provided). The default option otherwise is False.
But in my experience HuggingFace Spaces uses lazy caching by default.
### Have you searched existing ... | open | 2025-03-24T14:42:07Z | 2025-03-24T18:15:57Z | https://github.com/gradio-app/gradio/issues/10867 | [
"bug"
] | edmcman | 1 |
encode/databases | sqlalchemy | 369 | CockroachDB support | Hey, guys!
Do you have any plans to support CockroachDB, like a `sqlalchemy-cockroachdb`? | closed | 2021-08-17T09:14:27Z | 2021-08-26T12:18:45Z | https://github.com/encode/databases/issues/369 | [] | unittolabs | 1 |
aimhubio/aim | tensorflow | 2,592 | Add view/hide run via legend in metrics explorer | ## 🚀 Feature
Add the possibility to click on the elements of the legend in the metric explorers so that one can quickly view/hide the related runs or charts.
### Motivation
Quick explorations and visualisation of the results is an essential feature for a good metric explorer especially when having large amoun... | open | 2023-03-15T17:58:37Z | 2023-03-16T07:53:41Z | https://github.com/aimhubio/aim/issues/2592 | [
"type / enhancement",
"area / Web-UI"
] | dngfra | 1 |
serengil/deepface | deep-learning | 663 | 'deepface.commons.functions' has no attribute 'preprocess_face' | I'm trying to call DeepFace.stream() (library 0.0.78 installed from pip)
but get an error message
```
AttributeError: module 'deepface.commons.functions' has no attribute 'preprocess_face'
``` | closed | 2023-02-07T15:29:39Z | 2023-02-07T15:31:00Z | https://github.com/serengil/deepface/issues/663 | [
"bug"
] | noonv | 1 |
plotly/dash | jupyter | 2,517 | [BUG] Dash Design Kit's ddk.Notification does not render correctly on React 18.2.0 | **Describe your context**
Please provide us your environment, so we can easily reproduce the issue.
- replace the result of `pip list | grep dash` below
```
dash 2.9.3
dash-core-components 2.0.0
dash-html-components 2.0.0
dash-table 5.0.0
dash_cytoscape ... | closed | 2023-04-28T23:34:28Z | 2024-05-06T14:16:28Z | https://github.com/plotly/dash/issues/2517 | [] | rymndhng | 6 |
benbusby/whoogle-search | flask | 294 | [QUESTION] IP address query | This is just a random thing that popped into my mind.
When you usually google "my ip" there is a snippet on top of the results page that shows the current IP address. When you search that on whoogle, nothing shows up. Is that a limitation from google?
Was just curious in finding out from which IP results are fetc... | closed | 2021-04-22T00:54:09Z | 2021-04-27T01:33:36Z | https://github.com/benbusby/whoogle-search/issues/294 | [
"question"
] | milachevalier | 2 |
plotly/dash-component-boilerplate | dash | 120 | Fix python-3.6 CircleCI tests | Seems like it's [currently failing](https://app.circleci.com/pipelines/github/plotly/dash-component-boilerplate/208/workflows/27e8f11f-098c-45b3-a776-13792dec311b/jobs/521):
```
#!/bin/bash -eo pipefail
. venv/bin/activate
pip install -r tests/requirements.txt --quiet
pytest-cookies 0.5.1 has requirement pytest<... | open | 2021-02-22T22:39:16Z | 2021-02-23T03:49:51Z | https://github.com/plotly/dash-component-boilerplate/issues/120 | [] | xhluca | 3 |
allenai/allennlp | data-science | 5,457 | AllenNLP Models 2.8 | I'm trying to upgrade AllenNLP to 2.8.0, but since AllenNLP models wasn't upgraded accordingly, I can't keep the new version. Isn't the models project going to get released to 2.8.0 too?
Thanks! | closed | 2021-11-03T17:27:24Z | 2021-11-06T00:59:00Z | https://github.com/allenai/allennlp/issues/5457 | [
"bug"
] | pvcastro | 1 |
babysor/MockingBird | deep-learning | 592 | 根据作者训练进度继续训练合成器报错 | size mismatch for gst.stl.attention.W_query.weight: copying a param with shape torch.Size([512, 256]) from checkpoint, the shape in current model is torch.Size([512, 512]).
是顺着my_run8_25k.pt练的
顺着pretrained-11-7-21_75k.pt就没问题 | closed | 2022-05-30T02:11:48Z | 2022-07-09T06:48:49Z | https://github.com/babysor/MockingBird/issues/592 | [] | Noct-Cp | 4 |
scikit-image/scikit-image | computer-vision | 7,107 | Morphological operations for label images | Hi all,
I’ve recently implemented some simple morphological operations for label images using scikit-image. Specifically, I’ve implemented erosion, dilation, opening and closing, taking into account potential overlaps among labels and treating all label values equally. To illustrate, I’ve extracted some code from my... | open | 2023-08-26T00:03:38Z | 2024-02-27T02:23:01Z | https://github.com/scikit-image/scikit-image/issues/7107 | [
":pray: Feature request"
] | jwindhager | 6 |
flasgger/flasgger | flask | 47 | Authorization Header + UI input view | Anyone can help me with how to implement custom headers e.g. "Authorization header" in requests + adding UI element for it with flasgger?
I need to use JWT with some of the endpoints.
I was able to achieve this by modifying flasgger source code, but that shouldn't be the way! | open | 2017-01-01T15:56:58Z | 2023-10-08T06:27:20Z | https://github.com/flasgger/flasgger/issues/47 | [
"enhancement",
"help wanted",
"hacktoberfest"
] | saeid | 4 |
jofpin/trape | flask | 271 | Dear Sensei! | I have been trying to run Trape one way or another I need it badly!
Today after installing it again.. and running requirements.txt and utils and db. I got this results..
Note I am runing simultaneously on VM and a phisical pc.
Both same results also changing rw permissions.
I know you are extremely bussy,, and y... | open | 2020-11-06T08:34:09Z | 2020-11-07T01:36:57Z | https://github.com/jofpin/trape/issues/271 | [] | Sallysheridan | 6 |
miguelgrinberg/Flask-SocketIO | flask | 1,345 | Problem emitting from one namespace to another | Hi,
I have 2 clients connecting to a server using web sockets. The one client connects to the server from a Python script to the namespace "edge", the other client connects from a ReactJS frontend to the "ui" namespace. For good measure, each also joins their on respective room.
```python
@socketio.on('connect'... | closed | 2020-07-31T15:16:55Z | 2020-08-04T11:34:51Z | https://github.com/miguelgrinberg/Flask-SocketIO/issues/1345 | [
"question"
] | dian-workz | 2 |
2noise/ChatTTS | python | 900 | windows11 python3.11生成语音时报错 The expanded size of the tensor (42) must match the existing size (41) at non-singleton dimension 3. Target sizes: [2, 12, 1, 42]. Tensor sizes: [2, 1, 1, 41] | ```
[INFO] #2 download copy: '[asset/gpt/config.json asset/gpt/model.safetensors]'.
[WARNING] #2.2 skip exist file D:\software\ChatTTS/asset/gpt/model.safetensors
[WARNING] #2.1 skip exist file D:\software\ChatTTS/asset/gpt/config.json
[INFO] #3 open target folder 'D:\software\ChatTTS/asset/tokenizer'.
[INFO] #3 downlo... | closed | 2025-02-18T03:42:59Z | 2025-02-18T06:18:45Z | https://github.com/2noise/ChatTTS/issues/900 | [
"bug",
"documentation"
] | 625093700 | 1 |
flasgger/flasgger | rest-api | 194 | Request: release a new version (0.8.2?) with the latest bug fixes | Please publish a new release of Flasgger. I am currently relying on a local build of this repository at a fixed commit, and it would be nice to resume using an official release. Thank you! | closed | 2018-04-26T18:53:39Z | 2018-04-27T19:31:05Z | https://github.com/flasgger/flasgger/issues/194 | [] | abstiles | 2 |
FactoryBoy/factory_boy | django | 457 | Lost Dict params when using Traits | For explanation purpose I've created some simple code:
```python
class Y:
def __init__(self, a: int, b: str):
self.a = a
self.b = b
class X:
def __init__(self, y: {str:[Y]}):
self.y = y
class YItemFactory(factory.Factory):
class Meta:
model = Y
a = 1... | open | 2018-02-19T11:04:38Z | 2023-02-24T18:00:24Z | https://github.com/FactoryBoy/factory_boy/issues/457 | [
"Bug"
] | marjanoitaljano | 2 |
ultralytics/ultralytics | computer-vision | 18,839 | optimizer set SGD, The SGD of hyperparameter is not effective | ### Search before asking
- [x] I have searched the Ultralytics YOLO [issues](https://github.com/ultralytics/ultralytics/issues) and found no similar bug report.
### Ultralytics YOLO Component
_No response_
### Bug
The optimizer was set to SGD to fine tune the model and set some hyperparameters, but these hyperpar... | open | 2025-01-23T07:56:36Z | 2025-01-23T08:26:30Z | https://github.com/ultralytics/ultralytics/issues/18839 | [
"bug"
] | bluceliuljx | 2 |
FactoryBoy/factory_boy | django | 705 | Fix simple typo: charactes -> characters | # Issue Type
[x] Bug (Typo)
# Steps to Replicate
1. Examine docs/fuzzy.rst.
2. Search for `charactes`.
# Expected Behaviour
1. Should read `characters`.
| closed | 2020-02-26T07:18:08Z | 2020-02-26T10:37:20Z | https://github.com/FactoryBoy/factory_boy/issues/705 | [] | timgates42 | 1 |
tensorpack/tensorpack | tensorflow | 670 | Question about crop_and_resize in Faster RCNN | Hi, I have a simple question about your implementation of crop_and_resize. When you are deciding the initial sampling point, you used:
> nx0 = x0_box + spacing/2 - 0.5
https://github.com/tensorpack/tensorpack/blob/f417c49fe45759fb2c69cafcabe6613ea85ec469/examples/FasterRCNN/model_box.py#L105
What I don't unde... | closed | 2018-02-23T09:23:58Z | 2019-03-10T10:30:55Z | https://github.com/tensorpack/tensorpack/issues/670 | [
"examples",
"upstream issue"
] | jiang1st | 6 |
ivy-llc/ivy | pytorch | 27,945 | Fixed complex dtype not supported at jax and troch backend | closed | 2024-01-17T19:40:44Z | 2024-01-17T23:08:02Z | https://github.com/ivy-llc/ivy/issues/27945 | [
"Sub Task"
] | samthakur587 | 0 | |
LibrePhotos/librephotos | django | 1,113 | [meta] invalidate cache after action | This issue is for refactoring to RTK tracking only. It will be closed when refactoring is complete. | open | 2024-01-02T15:56:34Z | 2025-01-04T13:41:00Z | https://github.com/LibrePhotos/librephotos/issues/1113 | [
"bug"
] | sickelap | 2 |
FactoryBoy/factory_boy | django | 505 | Add functionality to mute specific receivers of signals (not just all signals) | #### The problem
As described at https://factoryboy.readthedocs.io/en/latest/orms.html#disabling-signals, it is possible to mute all signals of a certain type using the `factory.django.mute_signals` decorator. In my use case, hwoever, I have a specific receiver of `post_save` signals which calls an external API, and I... | open | 2018-08-15T22:04:07Z | 2024-10-16T12:55:51Z | https://github.com/FactoryBoy/factory_boy/issues/505 | [
"Feature"
] | khpeek | 5 |
pydata/bottleneck | numpy | 143 | package bottleneck 1.1.0 for debian | @toobaz, do you plan to add bottleneck 1.1.0 to debian?
| closed | 2016-09-14T19:53:32Z | 2016-10-14T22:22:48Z | https://github.com/pydata/bottleneck/issues/143 | [] | kwgoodman | 6 |
jina-ai/clip-as-service | pytorch | 227 | Error with BERT server | Hi,
after installing bert berver with ```pip install bert-serving-server``` I am not able to launch the server anymore.
Few day ago this command worked, but today an error occurs:
Command:
```
bert-serving-start -model_dir multi_cased_L-12_H-768_A-12 -num_worker=12 -max_seq_len=100
```
Error:
```
File "... | closed | 2019-02-01T12:03:02Z | 2019-02-03T15:43:30Z | https://github.com/jina-ai/clip-as-service/issues/227 | [] | simonefrancia | 5 |
marcomusy/vedo | numpy | 471 | Automatic transformation matrix | Hi @marcomusy,
I have a couple of point clouds (of a similar object but different type, plains in this case) which are randomly positioned. Now I would like to find the transformation matrix so that all the point clouds to have the same orientation/translation:
```
from glob import glob
import natsort
import ved... | closed | 2021-09-28T15:32:31Z | 2021-09-30T13:46:26Z | https://github.com/marcomusy/vedo/issues/471 | [] | ttsesm | 5 |
nerfstudio-project/nerfstudio | computer-vision | 3,087 | ns-render出现RuntimeError: stack expects a non-empty TensorList | **Describe the bug**
A clear and concise description of what the bug is.
**To Reproduce**
Steps to reproduce the behavior:
1. Go to '...'
2. Click on '....'
3. Scroll down to '....'
4. See error
**Expected behavior**
A clear and concise description of what you expected to happen.
**Screenshots**
If app... | open | 2024-04-17T09:44:50Z | 2024-07-16T20:22:34Z | https://github.com/nerfstudio-project/nerfstudio/issues/3087 | [] | 713Lyf | 5 |
zihangdai/xlnet | nlp | 113 | How to export? | I needed to know how to write the serving function to export the trained xlnet model.
I have this right now:
def serving_input_fn():
with tf.variable_scope("model"):
feature_spec = {
"input_ids": tf.FixedLenFeature([MAX_SEQ_LENGTH], tf.int64),
"input_mask": tf.FixedLenFeature([MAX_SEQ_LENGTH], tf.int64),
"segm... | closed | 2019-07-03T14:43:53Z | 2020-01-03T20:25:23Z | https://github.com/zihangdai/xlnet/issues/113 | [] | jinamshah | 11 |
comfyanonymous/ComfyUI | pytorch | 6,809 | Linux版的ComfyUI | 请问一下,如何在Linux配置开机后台自启动ComfyUI?比如如何写成service方式?非常感谢! | closed | 2025-02-14T00:29:25Z | 2025-02-14T10:32:57Z | https://github.com/comfyanonymous/ComfyUI/issues/6809 | [] | wchuanxin | 1 |
deeppavlov/DeepPavlov | tensorflow | 1,003 | BERT Classification files | Sorry for bothering I was wondering could I do classification the pdf files to different folders by the context of the file. For example, I have 3 folders invoices, cv, and input folder and could I train with bert nlp folders cv and invoices so when smb will put the pdf file to the input folder it will automatically de... | closed | 2019-09-18T13:26:38Z | 2020-05-06T12:54:45Z | https://github.com/deeppavlov/DeepPavlov/issues/1003 | [] | AnnaTumanova | 5 |
pyjanitor-devs/pyjanitor | pandas | 450 | [INF] Need to sync up requirements-dev.txt and environment.yml | There are some packages in `requirements-dev.txt` that are not present inside `environment.yml`.
Need to manually check to synchronize the two of them.
Version numbers in `requirements-dev.txt` should not be put back into `environment.yml`.
I will work on this. | closed | 2019-07-14T16:01:53Z | 2019-07-14T16:29:55Z | https://github.com/pyjanitor-devs/pyjanitor/issues/450 | [
"infrastructure"
] | ericmjl | 0 |
Johnserf-Seed/TikTokDownload | api | 224 | [BUG]TikTokMulti.py: error: unrecognized arguments: https://v.douyin.com/xxxxxxxx/ | **描述出现的错误**
对bug的清晰而简洁的描述。
执行命令行,报这个异常
`TikTokMulti.py: error: unrecognized arguments: https://v.douyin.com/xxxxxx/`
**bug复现**
复现这次行为的步骤:
1.更改了什么什么
2.点击了什么什么
3.“……”
**截图**
如果适用,添加屏幕截图以帮助解释您的问题。
**桌面(请填写以下信息):**
-操作系统:[例如windows10 64bit]
-vpn代理[例如开启、关闭]
-版本[如1.2.3]
**附文**
在此处添加有关此问题的文字。
| closed | 2022-09-28T11:55:46Z | 2022-10-08T12:47:21Z | https://github.com/Johnserf-Seed/TikTokDownload/issues/224 | [
"故障(bug)",
"额外求助(help wanted)",
"无效(invalid)"
] | bosen365 | 1 |
jupyterhub/repo2docker | jupyter | 937 | Support ignoring paths from a repo by reading a .dockerignore file | Is there a means to exclude files of the git repository from the docker image?
The use case is that of a (private) repository including solution notebooks to an assignment.
I presume this could be achieved with a post-build or so, but simply asking if we could have a configuration thing to include e.g. directorie... | closed | 2020-08-04T11:50:47Z | 2024-01-24T10:39:24Z | https://github.com/jupyterhub/repo2docker/issues/937 | [] | SylvainCorlay | 4 |
jupyter/nbviewer | jupyter | 695 | plotly figure not rendered nicely with slide view | My plotly figure is not rendered well when viewed with slide mode.
Here is my plot [viewed in a slide.](https://nbviewer.jupyter.org/format/slides/github/tarokiritani/testjupyter/blob/master/test%20plotly.ipynb#/)
This looks better when [viewed as a notebook.](https://nbviewer.jupyter.org/github/tarokiritani/test... | closed | 2017-05-05T11:25:15Z | 2017-05-05T14:26:35Z | https://github.com/jupyter/nbviewer/issues/695 | [] | tarokiritani | 1 |
lexiforest/curl_cffi | web-scraping | 126 | Sometime use over 100% cpus | When send some requests(use proxy), will pose following error by continuous. Then cpu will keeping using over 100% cpus and almost let system cant work with everything.
**Failed to perform, ErrCode: 28, Reason: 'Operation timed out after 30001 milliseconds with 0 bytes received'. This may be a libcurl error, See htt... | closed | 2023-09-19T23:31:51Z | 2025-03-07T05:36:08Z | https://github.com/lexiforest/curl_cffi/issues/126 | [
"bug"
] | WhZzi | 9 |
eriklindernoren/ML-From-Scratch | machine-learning | 111 | No module named 'mlfromscratch.utils.loss_functions' | Traceback (most recent call last):
File "C:\G\ML-From-Scratch\mlfromscratch\examples\gradient_boosting_regressor.py", line 9, in <module>
from mlfromscratch.utils.loss_functions import SquareLoss
ModuleNotFoundError: No module named 'mlfromscratch.utils.loss_functions' | open | 2024-11-20T08:51:03Z | 2024-11-20T08:51:03Z | https://github.com/eriklindernoren/ML-From-Scratch/issues/111 | [] | LeiYangGH | 0 |
graphql-python/graphql-core | graphql | 34 | GraphQLError is unhashable | It seems that the `logging` library in python assumes that exceptions are hashable, in order to be logged. It'd be great if we could treat GraphQL errors the same way as other builtin exceptions.
See also, a similar issue in the `schematics` project:
https://github.com/schematics/schematics/issues/452 | closed | 2019-05-30T03:11:20Z | 2019-05-31T22:40:44Z | https://github.com/graphql-python/graphql-core/issues/34 | [
"bug"
] | andrew-humu | 1 |
tfranzel/drf-spectacular | rest-api | 824 | @extend_schema has no effect on GET/retrieve extra actions in a ModelViewSet | DRF v3.11.1
drf-spectacular v0.15.0
When adding an extra `GET` action (not merely overriding `create` or `retrieve`) in a `ModelViewSet` and decorating it with `@extend_schema`, the specified request serializer is not represented as a `component` in the generated schema.
In the example below, the `search/` endp... | closed | 2022-09-30T17:59:33Z | 2022-10-04T10:31:12Z | https://github.com/tfranzel/drf-spectacular/issues/824 | [] | cantus-firmus | 5 |
apify/crawlee-python | web-scraping | 767 | Add code coverage badge to README | - [covecov](https://about.codecov.io/)
- Apify service account?
- Same for the SDK & client | open | 2024-11-29T14:46:23Z | 2024-11-29T14:46:40Z | https://github.com/apify/crawlee-python/issues/767 | [
"t-tooling"
] | vdusek | 0 |
vipstone/faceai | tensorflow | 52 | 大佬请问表情识别的模型为什么选择 simple_CNN.530-0.65 | 我看到原始的repo除了这个模型还有simple cnn 0.66 和 xception,请问为什么最后选择这个模型呢? | open | 2020-06-22T02:27:04Z | 2020-09-05T07:42:07Z | https://github.com/vipstone/faceai/issues/52 | [] | duchengyao | 1 |
marshmallow-code/apispec | rest-api | 4 | APISpec.add_path overwrites paths | I was toying around with writing a wsgi middleware that used smore while fleshing out some ideas and noticed that `smore.apispec.APISpec.add_path` does a [full replace via `dict.update`](https://github.com/marshmallow-code/smore/blob/dev/smore/apispec/core.py#L106) when adding a new path that matches an existing path. ... | closed | 2015-04-03T18:57:28Z | 2015-04-11T20:49:14Z | https://github.com/marshmallow-code/apispec/issues/4 | [] | hello-josh | 1 |
jina-ai/clip-as-service | pytorch | 274 | Can bert-as-service be used with saved model? for example Saved Model of fine-tuned BERT works well via TF serving on CPU only machine. | **Prerequisites**
> Please fill in by replacing `[ ]` with `[x]`.
* [x] Are you running the latest `bert-as-service`?
* [x] Did you follow [the installation](https://github.com/hanxiao/bert-as-service#install) and [the usage](https://github.com/hanxiao/bert-as-service#usage) instructions in `README.md`?
* [x] D... | closed | 2019-03-15T02:05:44Z | 2019-03-20T01:30:55Z | https://github.com/jina-ai/clip-as-service/issues/274 | [] | dhanaji | 1 |
numba/numba | numpy | 9,734 | `np.random.Generator.binomial` produces invalid values for "intermediate" sized `n`. | <!--
Thanks for opening an issue! To help the Numba team handle your information
efficiently, please first ensure that there is no other issue present that
already describes the issue you have
(search at https://github.com/numba/numba/issues?&q=is%3Aissue).
-->
## Reporting a bug
<!--
Before submittin... | closed | 2024-09-27T15:30:39Z | 2024-10-17T20:27:25Z | https://github.com/numba/numba/issues/9734 | [
"numpy",
"bug - numerically incorrect"
] | stuartarchibald | 0 |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.