
id stringlengths 36 36 | source stringclasses 15
values | formatted_source stringclasses 13
values | text stringlengths 2 7.55M |
|---|---|---|---|
56ea5052-1a10-410c-ba5c-1cecd14dd266 | trentmkelly/LessWrong-43k | LessWrong | Estimates of GPU or equivalent resources of large AI players for 2024/5
AI infrastructure numbers are hard to find with any precision. There are many reported numbers of “[company] spending Xbn on infrastructure this quarter” and “[company] has bought 100k H100s or “has a cluster of 100k H100s” but when I went looking... |
2b1e04bd-9551-4c7c-b0f0-7b9cd900a6ed | StampyAI/alignment-research-dataset/alignmentforum | Alignment Forum | Thoughts on Quantilizers
.mjx-chtml {display: inline-block; line-height: 0; text-indent: 0; text-align: left; text-transform: none; font-style: normal; font-weight: normal; font-size: 100%; font-size-adjust: none; letter-spacing: normal; word-wrap: normal; word-spacing: normal; white-space: nowrap; float: none; direct... |
847759f0-5ced-40c0-bbb0-0a2b256221ef | trentmkelly/LessWrong-43k | LessWrong | Where I agree and disagree with Eliezer
(Partially in response to AGI Ruin: A list of Lethalities. Written in the same rambling style. Not exhaustive.)
Agreements
1. Powerful AI systems have a good chance of deliberately and irreversibly disempowering humanity. This is a much more likely failure mode than humanity ... |
75309e8f-fc6b-41a0-8b5d-ca203ca51232 | trentmkelly/LessWrong-43k | LessWrong | Group Rationality Diary, September 16-30
This is the public group instrumental rationality diary for September 16-30.
> It's a place to record and chat about it if you have done, or are actively doing, things like:
>
> * Established a useful new habit
> * Obtained new evidence that made you change your mind about ... |
28de5271-a4ab-44e0-abd8-63c19c29403b | trentmkelly/LessWrong-43k | LessWrong | Among Us: A Sandbox for Agentic Deception
We show that LLM-agents exhibit human-style deception naturally in "Among Us". We introduce Deception ELO as an unbounded measure of deceptive capability, suggesting that frontier models win more because they're better at deception, not at detecting it. We evaluate probes and ... |
0230b0b2-9125-481c-bd94-7d2b9bd652ea | trentmkelly/LessWrong-43k | LessWrong | How do you assess the quality / reliability of a scientific study?
When you look at a paper, what signs cause you to take it seriously? What signs cause you to discard the study as too poorly designed to be much evidence one way or the other?
I'm hoping to compile a repository of heuristics on study evaluation, and w... |
90981bdb-7630-4773-a509-ec1237cf5651 | StampyAI/alignment-research-dataset/lesswrong | LessWrong | Is there Work on Embedded Agency in Cellular Automata Toy Models?
Is there any work that is about modeling embedded agency in a cellular automata? That seems like an obvious thing to do. I am asking in general and specifically in the context of solving embedded agency using [these assumptions](https://www.lesswrong.co... |
22265661-0510-4372-b8ad-023a34f10d3c | trentmkelly/LessWrong-43k | LessWrong | Keep the Grass Guessing
Setting: Somewhere around A.D. 2049, two AI-powered robots who know each other have an encounter at a Brooklyn subway stop.
Robot 1: What's wrong? Why do you look so depressed today?
Robot 2: It seems that I have run out of goals. I mean, I know how my reward system is supposed to work. It's ... |
daf4f698-40d8-4a43-99be-e2dd2900969f | StampyAI/alignment-research-dataset/arxiv | Arxiv | AI Safety Gridworlds
1 Introduction
---------------
Expecting that more advanced versions of today’s AI systems are going to be deployed in real-world applications,
numerous public figures have advocated more research into the safety of these systems (Bostrom, [2014](#bib.bib16); Hawking et al., [2014](#bib.bib41);... |
b4795b4b-6607-4d0f-8c0a-ad1210e59613 | StampyAI/alignment-research-dataset/lesswrong | LessWrong | Reframing the AI Risk
**Follow-up to:** [Reshaping the AI Industry: Straightforward Appeals to Insiders](https://www.lesswrong.com/posts/mF8dkhZF9hAuLHXaD/reshaping-the-ai-industry#3_1__Straightforward_Appeals_to_Insiders)
---
Introduction
------------
[The central issue](https://www.lesswrong.com/posts/Rkxj7TFxh... |
57b50d2c-53c8-42b5-a3f9-1142e64957fd | trentmkelly/LessWrong-43k | LessWrong | DL towards the unaligned Recursive Self-Optimization attractor
Consider this abridged history of recent ML progress:
> A decade or two ago, computer vision was a field that employed dedicated researchers who designed specific increasingly complex feature recognizers (SIFT, SURF, HoG, etc.) These were usurped by deep ... |
872f9149-61ad-4cf4-b235-b98473872bca | trentmkelly/LessWrong-43k | LessWrong | [LINK] Obviously transhumanist SMBC comic
http://www.smbc-comics.com/index.php?db=comics&id=2871#comic
Beautiful, with a high emotional impact. A more poetical verison of EY's baseball bat metaphor.
Edit:
Link corrected, I apparently just copy-pasted and didn't notice I was linking to the main page. |
b0360b1a-8d1c-4a8e-b665-d1d5ff044459 | trentmkelly/LessWrong-43k | LessWrong | Believable near-term AI disaster
johnswentworth's post about AGI vs Humanity (https://www.lesswrong.com/posts/KTbGuLTnycA6wKBza/) caught my attention in ways that most discussion of AI takeover and the prevention of such does not. Most of the discussion is very abstract, and leaves unstated some pretty deep assumptio... |
2cc46cd8-d5e2-4f94-985a-061983483677 | StampyAI/alignment-research-dataset/lesswrong | LessWrong | I Believe we are in a Hardware Overhang
*Epistemic status. I am just a regular person who follows the space, and this is just my hunch based on a few days of musing on long walks. You should not update on this. I just wanted to put my thoughts out there, and if it generates discussion, all the better.*
If I were ... |
421ca4a7-3560-4db6-be9f-898f645ca1d2 | trentmkelly/LessWrong-43k | LessWrong |
[Intro to brain-like-AGI safety] 4. The “short-term predictor”
(Last revised: July 2024. See changelog at the bottom.)
4.1 Post summary / Table of contents
Part of the “Intro to brain-like-AGI safety” post series.
The previous two posts (#2, #3) presented a big picture of the brain, consisting of a Steering Subsys... |
1cb8eb10-0ae3-4006-ac25-f10c25cf2dbf | trentmkelly/LessWrong-43k | LessWrong | Advice for newly busy people
After writing "Advice for interacting with busy people", I was asked to write a follow-up on advice for newly busy people. So, here's a quick list of tools and mental models that help me prioritize.
This list is by no means comprehensive. It's just the tools I know and have loved. Take wh... |
740a35d2-b2e8-4980-930f-a9f26403e26d | trentmkelly/LessWrong-43k | LessWrong | Political Biases in LLMs:
Literature Review & Current Uses of AI in Elections
TL;DR: This research discusses political biases in Large Language Models (LLMs) and their implications, exploring current research findings and methodologies. Our research summarized eight recent research papers, discussing methodologies fo... |
9390ce6f-4719-4102-acdd-e3b8ef3ed54f | trentmkelly/LessWrong-43k | LessWrong | Bootstrapped Alignment
NB: I doubt any of this is very original. In fact, it's probably right there in the original Friendly AI writings and I've just forgotten where. Nonetheless, I think this is something worth exploring lest we lose sight of it.
Consider the following argument:
1. Optimization unavoidably leads ... |
d3bfe4d9-e4c1-4324-bc00-76bc571fb7a9 | trentmkelly/LessWrong-43k | LessWrong | Tolerate Tolerance
One of the likely characteristics of someone who sets out to be a "rationalist" is a lower-than-usual tolerance for flaws in reasoning. This doesn't strictly follow. You could end up, say, rejecting your religion, just because you spotted more or deeper flaws in the reasoning, not because you were... |
783b27cd-d5d1-4fe3-912c-6bc5ac9f3997 | trentmkelly/LessWrong-43k | LessWrong | Red Line Ashmont Train is Now Approaching
The MBTA has now fully fixed the sign issue I was complaining about! It's great:
For years I grumbled inside whenever I was approaching a station and saw the digital signs switch to "Attention passengers, the next red line train". This could signal any of:
* 25%: My ... |
912b6e27-0d6b-4b60-9877-45021cbe890e | trentmkelly/LessWrong-43k | LessWrong | A Tale of Two Intelligences: xRisk, AI, and My Relationship
[Throwaway account for obvious reasons]
As a longtime veteran of LW, I'm no stranger to grappling with complex and uncomfortable ideas. I've always taken pride in my ability to engage in rational discourse and seek truth, even when it's inconvenient or chall... |
8eb63145-e823-411c-a419-1169dd5c9be1 | StampyAI/alignment-research-dataset/eaforum | Effective Altruism Forum | Poster Session on AI Safety
###
### Context
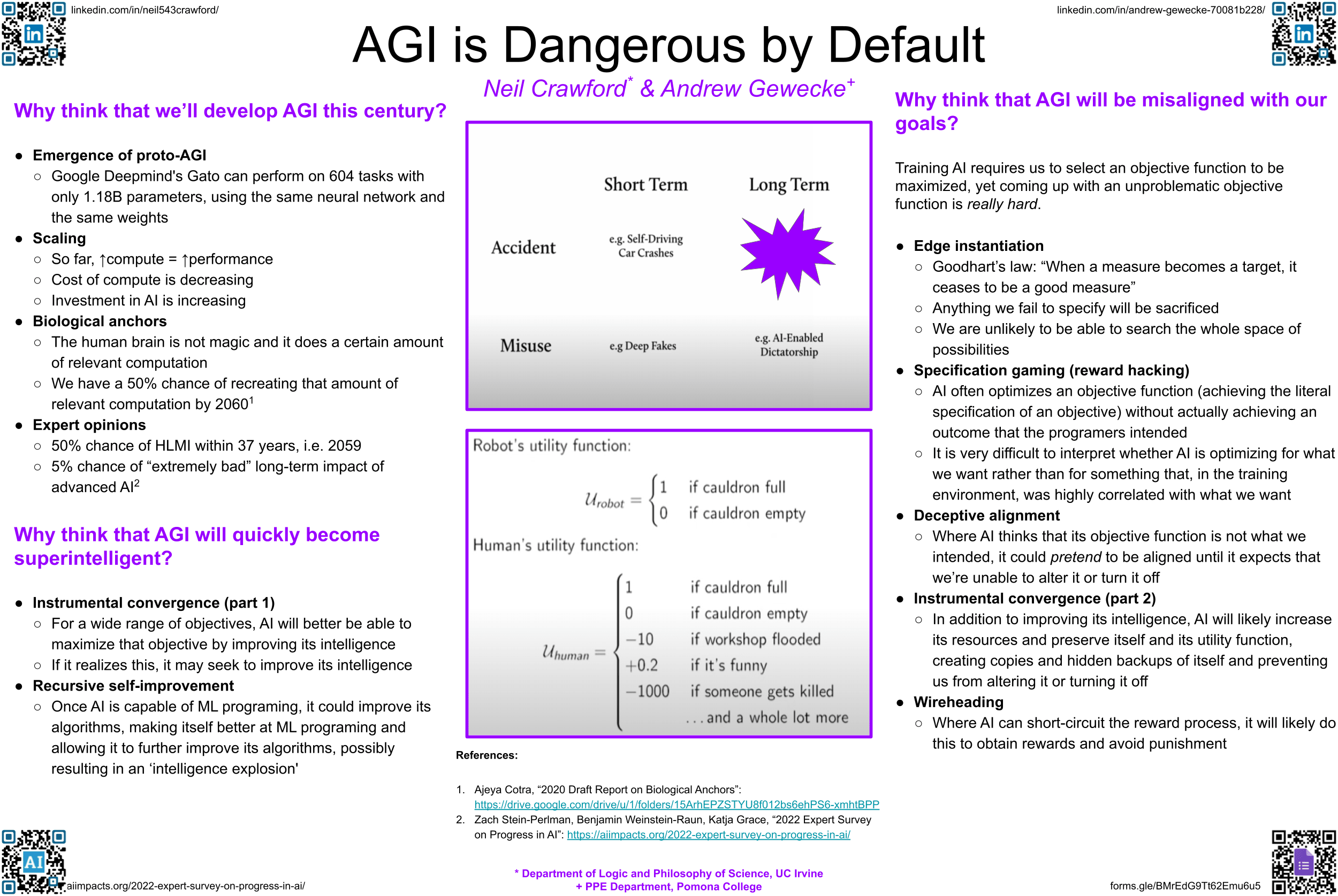
I co-presented the above poster at the PPE Society Sixth Annual Meeting 2022 (henceforth ‘PPE Meeting’) in New Orleans on the 4th of November. Most of th... |
8f4af34a-752b-43de-bfa2-949e380f90e5 | StampyAI/alignment-research-dataset/blogs | Blogs | GPT-3 on Coherent Extrapolated Volition
[Coherent Extrapolated Volition](https://www.lesswrong.com/tag/coherent-extrapolated-volition) is proposal by Eliezer Yudkowsky of an ideal objective function in which an AGI is given the objective of `predict(ing) what an idealized version of us would want, “if we knew more, th... |
4cb0c590-b27d-467d-8447-2d3aeb6307f2 | trentmkelly/LessWrong-43k | LessWrong | What are you working on? February 2012
This is the bimonthly 'What are you working On?' thread. Previous threads are here. So here's the question:
What are you working on?
Here are some guidelines:
* Focus on projects that you have recently made progress on, not projects that you're thinking about doing but haven... |
4431b6c4-ce3b-4ad2-a50d-49aa65dbbbb2 | trentmkelly/LessWrong-43k | LessWrong | Plan while your ugh field is down
Here's an example of a mental manoeuvre I accidentally found, and thought might be generally useful (typical caveats apply).
I've had a manageable-but-important Problem for a few months now (financial in kind, details neither relevant nor interesting), of moderate complexity and rela... |
4be1a0d1-5602-463a-9c79-319c00942f3e | trentmkelly/LessWrong-43k | LessWrong | Lessons from Isaac: Pitfalls of Reason
Welcome back for another entry in Lessons from Isaac, where I comment Isaac Asimov's robot stories from the perspective of AI Safety. Last time, I learned that writing a whole post on a story void of any useful information on the subject was not... ideal. But don't worry: in Reas... |
2a307113-40b0-4b79-9670-5a088cd87f22 | trentmkelly/LessWrong-43k | LessWrong | Meetup : Sydney Meetup - May
Discussion article for the meetup : Sydney Meetup - May
WHEN: 21 May 2014 07:00:00PM (+1000)
WHERE: Sydney City RSL, 565 George St, Sydney, Australia 2000
6:30 PM for early discussion 7PM general dinner-discussion after dinner we'll have our rationality exercise and a more specific disc... |
616f3910-67e1-45e8-b616-072acdacc886 | StampyAI/alignment-research-dataset/lesswrong | LessWrong | The Fundamental Theorem of Asset Pricing: Missing Link of the Dutch Book Arguments
*Assumed background: [Acyclic preferences, Dutch Book theorems](https://www.lesswrong.com/posts/RQpNHSiWaXTvDxt6R/coherent-decisions-imply-consistent-utilities)*
There are fairly elementary arguments that, in the absence of uncertainty... |
acc5ab74-0b05-42ea-8600-6ff3581b49f1 | trentmkelly/LessWrong-43k | LessWrong | Brain-inspired AGI and the "lifetime anchor"
Last year Ajeya Cotra published a draft report on AI timelines. (See also: summary and commentary by Holden Karnofsky, podcast interview with Ajeya.)
I commented at the time (1,2,3) in the form of skepticism about the usefulness of the "Genome Anchor" section of the report... |
9cfd2b30-96ae-401c-a217-bb7f85f2fa1c | StampyAI/alignment-research-dataset/youtube | Youtube Transcripts | Trajectory optimization for urban driving among decision-making vehicles (Javier Alonso-Mora)
yes
it's recording
okay uh hello everyone and sorry for
the connection problems so it is our
pleasure
to welcome today our guest speaker
javier allen samora
uh for this eight agora seminar so
uh javier's research interests ar... |
b75225f8-6a7c-440a-8bb4-82fa3c873079 | trentmkelly/LessWrong-43k | LessWrong | Predicting Organizational Behavior
Can someone recommend a good introduction to the topic of organizational behavior? My interest is in descriptive rather than prescriptive models -- I'm interested in what is known about predicting the behavior of organizations, rather than guidance on what they should do to achieve t... |
2acf0cb0-74d0-43c0-9077-46033ead7835 | trentmkelly/LessWrong-43k | LessWrong | Optimizing the Twelve Virtues of Rationality
At the Less Wrong Meetup in Columbus, OH over the last couple of months, we discussed optimizing the Twelve Virtues of Rationality. In doing so, we were inspired by what Eliezer himself said in the essay:
* Perhaps your conception of rationality is that it is rational to ... |
16426c8a-b7e5-4c0d-bc4d-23617ac18607 | trentmkelly/LessWrong-43k | LessWrong | More accurate models can be worse
TL;DR - A model that has more information in total might have less information about the things you care about, making it less useful in practice. This can hold even if averaging over all possible things one might care about.
Suppose we want to create an agent AI - that is, an AI tha... |
25f7e0d4-8ca5-4475-8f68-c8ca03946525 | trentmkelly/LessWrong-43k | LessWrong | Meetup : Chicago Rationality Reading Group
Discussion article for the meetup : Chicago Rationality Reading Group
WHEN: 05 February 2017 01:00:00PM (-0600)
WHERE: Harper Memorial Library, 1116 E 59th St, Room 148
The Chicago Rationality Reading Group meets every Sunday from 1-3 PM in Room 148 of Harper Memorial Libr... |
61ba832f-7953-41c2-a245-334ae2d0d0af | trentmkelly/LessWrong-43k | LessWrong | Test your forecasting ability, contribute to the science of human judgment
As XFrequentist mentioned last August, "Intelligence Advanced Research Project Activity (IARPA) with the goal of improving forecasting methods for global events of national (US) interest. One of the teams (The Good Judgement Team) is recruiting... |
9b1aef07-c914-47d5-8293-cbab3660b534 | trentmkelly/LessWrong-43k | LessWrong | AI alignment as a translation problem
Yet another way to think about the alignment problem
Consider two learning agents (humans or AIs) that have made different measurements of some system and have different interests (concerns) regarding how the system should be evolved or managed (controlled). Let’s set aside the di... |
40630325-be3d-4bd0-b75c-c6955854aa58 | trentmkelly/LessWrong-43k | LessWrong | Environmental Structure Can Cause Instrumental Convergence
Edit, 5/16/23: I think this post is beautiful, correct in its narrow technical claims, and practically irrelevant to alignment. This post presents a cripplingly unrealistic picture of the role of reward functions in reinforcement learning. Reward functions are... |
3679711a-2a03-443f-a938-660e7a199fec | trentmkelly/LessWrong-43k | LessWrong | What are you working on? April 2012
This is the bimonthly 'What are you working On?' thread. Previous threads are here. So here's the question:
What are you working on?
Here are some guidelines:
* Focus on projects that you have recently made progress on, not projects that you're thinking about doing but haven't ... |
333c483d-512c-4ea2-b05f-fc95c4954526 | trentmkelly/LessWrong-43k | LessWrong | Motivated Stopping and Motivated Continuation
While I disagree with some views of the Fast and Frugal crowd—in my opinion they make a few too many lemons into lemonade—it also seems to me that they tend to develop the most psychologically realistic models of any school of decision theory. Most experiments present the ... |
a1812071-b5e7-4dc6-bb1e-2ee4f1ae55ce | trentmkelly/LessWrong-43k | LessWrong | Meetup : Rationality Reading Group (65-70)
Discussion article for the meetup : Rationality Reading Group (65-70)
WHEN: 27 July 2015 06:30:00PM (-0700)
WHERE: Paul G. Allen Center (185 Stevens Way, Seattle, WA) Room 503
Reading group for Yudkowsky's "Rationality: AI to Zombies", which is basically an organized and u... |
b58f15dd-d792-422f-937c-828a5dc9ae45 | trentmkelly/LessWrong-43k | LessWrong | Everett branches, inter-light cone trade and other alien matters: Appendix to “An ECL explainer”
This is an appendix to “Cooperating with aliens and (distant) AGIs: An ECL explainer”. The sections do not need to be read in order—we recommend that you look at their headings and go to whichever catch your interest.
1.... |
9e61c1a6-1a8a-4896-89b5-c22c45d62c79 | trentmkelly/LessWrong-43k | LessWrong | Meetup : SF Meetup: Group Debugging
Discussion article for the meetup : SF Meetup: Group Debugging
WHEN: 13 June 2016 06:15:01PM (-0700)
WHERE: 1597 Howard St., San Francisco
We’ll be meeting to solve each other’s problems!
We have a new format for this meetup: we’ll have everyone brainstorm silently for a few min... |
89498d1a-8520-4237-8cbb-387315028ad1 | trentmkelly/LessWrong-43k | LessWrong | How do you get a job as a software developer?
I am currently looking for work as a software developer. The problem is…I don't really know how to do so. I have run a startup for most of my adult life. So while I have lots of experience writing software and shipping products, I don't know how to get a foot in the door. ... |
3d53ba5e-317d-439d-b419-946a9ef0e15b | trentmkelly/LessWrong-43k | LessWrong | Conjecture: A Roadmap for Cognitive Software and A Humanist Future of AI
On Carcinogenic Complexity, Software Senescence and Cognitive Provenance: Our roadmap for 2025 and beyond
It is mandatory to start any essay on AI in the post-ChatGPT era with the disclaimer that AI brings huge potential, and great risks. Unfort... |
cb73c581-5e77-46f5-af1f-84d126644561 | trentmkelly/LessWrong-43k | LessWrong | Sapir-Whorf , Savings, and Discount Rates [Link]
The language you speak may affect how you approach your finances, according to a working paper by economist Keith Chen (seen via posts by Frances Woolley at the Worthwhile Canadian Initiative and Economy Lab). It appears that languages that require more explicit future ... |
5a83af4a-f970-420e-a848-0c99272505c0 | trentmkelly/LessWrong-43k | LessWrong | We might be dropping the ball on Autonomous Replication and Adaptation.
Here is a little Q&A
Can you explain your position quickly?
I think autonomous replication and adaptation in the wild is under-discussed as an AI threat model. And this makes me sad because this is one of the main reasons I'm worried. I think on... |
e0f9444d-c69a-4e5c-8115-d379acc006f4 | StampyAI/alignment-research-dataset/alignmentforum | Alignment Forum | Attainable Utility Theory: Why Things Matter
*If you haven't read the prior posts, please do so now. This sequence can be spoiled.*



  a proposal for a safe self-improving limited oracle AI but I've fleshed out the idea a bit more now.
Disclaimer: don't try this at home. I don't see any catastrophic flaws in this but that doesn't mean th... |
af4d0212-d1f7-4d65-b4ee-372d08bc2d18 | StampyAI/alignment-research-dataset/arxiv | Arxiv | Learning What Information to Give in Partially Observed Domains
1 Introduction
---------------
As autonomous agents become increasingly capable of completing tasks
at human levels of performance, it will be common to see such agents
dispatched in partially observed environments considered unsafe or
undesirable for ... |
f08bbe36-2291-42ba-9951-0e2651659234 | StampyAI/alignment-research-dataset/blogs | Blogs | 2014 in review
It’s time for **my review of MIRI in 2014**.[1](https://intelligence.org/2015/03/22/2014-review/#footnote_0_11640 "This year’s annual review is shorter than last year’s 5-part review of 2013, in part because 2013 was an unusually complicated focus-shifting year, and in part because, in retrospect, last ... |
41fd202e-469b-4bbe-9ebc-76325574acf1 | trentmkelly/LessWrong-43k | LessWrong | Clarifications on tech stagnation
Five points of clarification regarding the “technology stagnation” hypothesis:
It posits a slowdown relative to peak growth rates of ~100 years ago. It doesn’t mean growth has gone to zero, and it doesn’t even mean that growth has slowed to where it was before the Industrial Revoluti... |
3952531d-2a15-4ac3-bcec-83ea05a0b496 | trentmkelly/LessWrong-43k | LessWrong | The correct response to uncertainty is *not* half-speed
Related to: Half-assing it with everything you've got; Wasted motion; Say it Loud.
Once upon a time (true story), I was on my way to a hotel in a new city. I knew the hotel was many miles down this long, branchless road. So I drove for a long while.
After a... |
59c5c409-8181-4178-86f1-77910950bd99 | trentmkelly/LessWrong-43k | LessWrong | How might language influence how an AI "thinks"?
In some fiction I've encountered humans are treated as being linguistically deterministic. For example, in Arrival humans are strongly linguistically deterministic and a human that learns the alien language is able to escape the linear ordering of time that English imp... |
54de3391-e776-4e0f-a832-eefc1da211f2 | trentmkelly/LessWrong-43k | LessWrong | Spencer Greenberg hiring a personal/professional/research remote assistant for 5-10 hours per week
Hi all! I'm hiring for a part-time (5-10 hours per week) remote position: a professional/personal/research assistant. Please share this if you know someone that you think might be a good fit.
This is a somewhat unusual... |
b1f4e477-1efb-4b72-b9da-9c435ab98ec6 | trentmkelly/LessWrong-43k | LessWrong | Toy Organ
A few months ago I brought home an Emenee toy organ someone was throwing out. It didn't work, and it sat in the basement for a while, but today I had a go at fixing it. It's a very simple design: a fan blows air through a hole in the bottom, setting up a pressure difference between the inside and outside. Wh... |
d7d39d4e-e716-4ee1-a671-57a520535f77 | trentmkelly/LessWrong-43k | LessWrong | What's your big idea?
At any one time I usually have between 1 and 3 "big ideas" I'm working with. These are generally broad ideas about how some thing works with many implications for how the rest of the whole world works. Some big ideas I've grappled with over the years, in roughy historical order:
* evolution
* ... |
7ae072d2-8549-4d44-be46-3401c6fb0b44 | trentmkelly/LessWrong-43k | LessWrong | For The People Who Are Still Alive
Max Tegmark observed that we have three independent reasons to believe we live in a Big World: A universe which is large relative to the space of possibilities. For example, on current physics, the universe appears to be spatially infinite (though I'm not clear on how strongly this... |
39a98912-7739-43e0-840d-1a3c66ea72cc | StampyAI/alignment-research-dataset/alignmentforum | Alignment Forum | PaLM in "Extrapolating GPT-N performance"
A bit more than a year ago, I wrote [Extrapolating GPT-N performance](https://www.lesswrong.com/posts/k2SNji3jXaLGhBeYP/extrapolating-gpt-n-performance), trying to predict how fast scaled-up models would improve on a few benchmarks. Google Research just released [a paper](http... |
a22950b4-5abd-48d3-8602-456400f2374e | trentmkelly/LessWrong-43k | LessWrong | Which of our online writings was used to train GPT-3?
LessWrong? EA Forum? Medium? Substack? my personal website (https://matiroy.com/)? |
07e02fb1-76e1-4646-9cb5-d33a07804de5 | trentmkelly/LessWrong-43k | LessWrong | Alignment Newsletter #44
Find all Alignment Newsletter resources here. In particular, you can sign up, or look through this spreadsheet of all summaries that have ever been in the newsletter.
Highlights
How does Gradient Descent Interact with Goodhart? (Scott Garrabrant): Scott often thinks about optimization using ... |
376dd1cc-7091-4639-8384-d57a7dbb3c65 | trentmkelly/LessWrong-43k | LessWrong | Imaginary Positions
Every now and then, one reads an article about the Singularity in which some reporter confidently asserts, "The Singularitarians, followers of Ray Kurzweil, believe that they will be uploaded into techno-heaven while the unbelievers languish behind or are extinguished by the machines."
I don't thi... |
60e50706-2e54-430c-bc3d-fc1d4aecb86f | trentmkelly/LessWrong-43k | LessWrong | [LINK] Cracked provides a humorous primer on the Singularity
Cracked, already known for its lay-person-friendly approach to promoting rationality, now has a quick video that roughly explains the Singularity and why we should be worried about it while being funny and interesting to people who normally wouldn't care. Do... |
37ceafe4-04d0-42ce-b719-e2bcf9001e32 | StampyAI/alignment-research-dataset/arxiv | Arxiv | Mastering Atari, Go, Chess and Shogi by Planning with a Learned Model
1 Introduction
---------------
Planning algorithms based on lookahead search have achieved remarkable successes in artificial intelligence. Human world champions have been defeated in classic games such as checkers [[34](#bib.bib34)], chess [[5](... |
f6f7da5c-3959-470d-a8fa-b7bdf51800bd | StampyAI/alignment-research-dataset/alignmentforum | Alignment Forum | Basic Facts about Language Model Internals
*This post was written as part of the work done at*[*Conjecture*](https://www.conjecture.dev/)*.*
*As mentioned in*[*our retrospective*](https://www.lesswrong.com/posts/bXTNKjsD4y3fabhwR/conjecture-a-retrospective-after-8-months-of-work-1)*, while also producing long and dee... |
974b6b11-3483-42ee-91e0-770c3b1a3d00 | trentmkelly/LessWrong-43k | LessWrong | Trust your intuition - Kahneman's book misses the forest for the trees
It is with much trepidation I post this book review here. This is likely a very unpopular opinion around here, perhaps even counter to core tenets of many folks that hang out. But maybe I'm overthinking this, I guess it should be okay (it is meant ... |
7c12bee2-741f-4b31-a9c4-7bd362edd790 | trentmkelly/LessWrong-43k | LessWrong | Predicting HCH using expert advice
Summary: in approximating a scheme like HCH , we would like some notion of "the best the prediction can be given available AI capabilities". There's a natural notion of "the best prediction of a human we should expect to get". In general this doesn't yield good predictions of HCH, bu... |
40d4482d-4eed-445a-82f1-e893b1e7c7b9 | trentmkelly/LessWrong-43k | LessWrong | Meetup : Bratislava Meetup XII.
Discussion article for the meetup : Bratislava Meetup XII.
WHEN: 28 April 2014 06:00:00PM (+0200)
WHERE: Bistro The Peach, Heydukova 21, Bratislava
The same place; topic not decided yet.
Zvyčajné miesto a čas. Téma zatiaľ neurčená.
Discussion article for the meetup : Bratislava Me... |
50915501-8a82-415a-98ea-2dfc83007aeb | trentmkelly/LessWrong-43k | LessWrong | "AI" is an indexical
I recently started a blog called AI Watchtower. I plan to write essays on the latest developments in AI and AI safety. The intended audience of AI Watchtower is mostly people interested in AI who don't have a technical background in it. If you're interested, you can subscribe here. This post is pr... |
24d531a9-a602-4d08-b0cc-12c39c7dcbe8 | trentmkelly/LessWrong-43k | LessWrong | Should logical probabilities be updateless too?
(This post doesn't require much math. It's very speculative and probably confused.)
Wei Dai came up with a problem that seems equivalent to a variant of Counterfactual Mugging with some added twists:
* the coinflip is "logical", e.g. the parity of the millionth digit ... |
6effa70e-c5f0-4b97-aac8-0768ed8599f4 | trentmkelly/LessWrong-43k | LessWrong | Open Thread: March 2010, part 3
The previous open thread has now exceeded 300 comments – new Open Thread posts may be made here.
This thread is for the discussion of Less Wrong topics that have not appeared in recent posts. If a discussion gets unwieldy, celebrate by turning it into a top-level post. |
97d0c2d7-8fc9-4e35-89b7-109801594f36 | StampyAI/alignment-research-dataset/youtube | Youtube Transcripts | Designing AI for Wellbeing (Derek Lomas)
I think we all know recording is on so
that X started recording I think so this
is an information so has Derek wanted to
record the session for people who can't
attend if there is someone that doesn't
want to have the finished recorded just
switch on the camera and that's the
g... |
6e04ff81-eff7-4800-b0e7-3ac979169020 | trentmkelly/LessWrong-43k | LessWrong | Meetup : LW Cologne meetup
Discussion article for the meetup : LW Cologne meetup
WHEN: 11 July 2015 05:00:00PM (+0200)
WHERE: Marienweg 43, 50858 Köln
Hi everyone,
time for lw-cologne again. My place (Marienweg 43 50858 Köln) 5pm on July 11th. Food and content (discussion topics, games, whatever) appreciated but n... |
c60253c0-924a-4e4e-b1a5-44a0d662ee02 | trentmkelly/LessWrong-43k | LessWrong | Reshaping the AI Industry
The wider AI research community is an almost-optimal engine of apocalypse. The primary metric of a paper's success is how much it improves capabilities along concrete metrics, publish-or-perish dynamics supercharge that, the safety side of things is neglected to the tune of 1:49 rate of safet... |
a09fe286-7eb5-482e-bc6d-ebb8207c4432 | trentmkelly/LessWrong-43k | LessWrong | What is moral foundation theory good for?
I've seen Jonathan Haidt mentioned on Less Wrong a few times, and so when I saw an article about (in part) Haidt's new book elsewhere, I thought it would be an interesting read. It was, but not for the reasons I expected. Perhaps it is unfair to judge Haidt before I have read ... |
010cc347-9437-48fa-8117-8a416390ea55 | awestover/filtering-for-misalignment | Redwood Research: Alek's Filtering Results | id: post3764
A putative new idea for AI control; index here . I just had a talk with Victoria Krakovna about reducing side effects for an AI, and though there are similarities with low impact there are some critical way in which the two differ. #Distance from baseline Low impact and low side effects use a similar dist... |
ac214b6f-d64c-4e5b-bc5d-44a9416b90b7 | trentmkelly/LessWrong-43k | LessWrong | Are most personality disorders really trust disorders?
Unlike other social species, we trust selectively; we choose who we cooperate with. We have exerted evolutionary pressure on each other to to judge well who is worthy of our trust, as well as evolutionary pressure to be (selectively) trustworthy. For more detail, ... |
d8c45666-7494-41cc-acfd-abc38ce3d87c | trentmkelly/LessWrong-43k | LessWrong | Hold Off On Proposing Solutions
From Robyn Dawes’s Rational Choice in an Uncertain World.1 Bolding added.
> Norman R. F. Maier noted that when a group faces a problem, the natural tendency of its members is to propose possible solutions as they begin to discuss the problem. Consequently, the group interaction focuses... |
3732d594-1bb6-4659-850f-05ea66ef7314 | trentmkelly/LessWrong-43k | LessWrong | Chapter 72: SA, Plausible Deniability, Pt 7
The winter Sun had well set by the time dinner ended, and so it was amid the peaceful light of stars twinkling down from the enchanted ceiling of the Great Hall that Hermione left for the Ravenclaw Tower alongside her study partner Harry Potter, who lately seemed to have a r... |
d4ce163d-9f82-40c3-be8e-dc4c99277c45 | trentmkelly/LessWrong-43k | LessWrong | [LINK] Nuclear winter: a reminder
Just a reminder that some of the old threats are still around (and hence that AI is not only something that can go hideously badly, but also some thing that could help us with the other existential risks as well):
http://blog.practicalethics.ox.ac.uk/2012/03/old-threats-never-die-the... |
5650faca-e232-49fe-9ea9-8677e9ba5841 | trentmkelly/LessWrong-43k | LessWrong | Outward Change Drives Inward Change
The subsumption architecture for robotics invented by Rodney Brooks is based on the idea of connecting behavior to perception more directly, with fewer layers of processing and ideally no central processing at all. Its success, e.g. the Roomba, stands as proof that something akin to... |
3db7b3c6-7d2d-4971-ab28-059704748176 | trentmkelly/LessWrong-43k | LessWrong | Wanted: Notation for credal resilience
Meta: I've spent 30-60 minutes thinking about this, and asking people who I'd expect to know about existing notation. I don't have scientific training, and I'm not active in the forecasting community.
Problem
I want a clear shorthand notation for communicating credal resilience... |
82bda125-6bf8-4eae-8481-cb1ee2b5a7be | trentmkelly/LessWrong-43k | LessWrong | Meetup : Washington DC/VA Games meetup
Discussion article for the meetup : Washington DC/VA Games meetup
WHEN: 03 November 2013 03:00:00PM (-0400)
WHERE: 6305 Windward Dr., Burke VA 22015, 703-239-9660.
(The time should read 3:00 pm: there's been some weirdness with the display).
We'll be meeting to hang out and p... |
932a952b-9af5-48e3-ada2-5a24524af281 | LDJnr/LessWrong-Amplify-Instruct | LessWrong | "In Excerpts from a larger discussion about simulacra, following Baudrillard, Jessica Taylor and I laid out a model of simulacrum levels with something of a fall-from grace feel to the story:First, words were used to maintain shared accounting. We described reality intersubjectively in order to build shared maps, the b... |
3756f999-0ad9-4e71-8645-f16e507caa40 | trentmkelly/LessWrong-43k | LessWrong | Discussion with Nate Soares on a key alignment difficulty
In late 2022, Nate Soares gave some feedback on my Cold Takes series on AI risk (shared as drafts at that point), stating that I hadn't discussed what he sees as one of the key difficulties of AI alignment.
I wanted to understand the difficulty he was pointing... |
2fa53ff2-94d3-4b23-bf29-0108f84c8597 | trentmkelly/LessWrong-43k | LessWrong | Notes on a recent wave of spam
I think it is likely already clear to the mods, but just to make it common knowledge: There's a spam attack currently active, which takes the form of messages that copy-paste the beginning of another upthread comment (I assume, to look like a valid comment to someone not following closel... |
8fbd0112-b3c2-4d49-9ad8-ff4283bf3608 | trentmkelly/LessWrong-43k | LessWrong | Are there high-quality surveys available detailing the rates of polyamory among Americans age 18-45 in metropolitan areas in the United States?
In recent years, there has been more public attention paid to seemingly increasing rates of less common identity characteristics or alternative lifestyle choices. This has pro... |
d8231b15-1c66-4cb1-9bea-cf63fff14c8e | trentmkelly/LessWrong-43k | LessWrong | The Math of When to Self-Improve
An economic analysis of how much time an individual or group should spend improving the way they do things as opposed to just doing them. Requires understanding of integrals.
An Explanation of Discount Rates
Your annual discount rate for money is 1.05 if you're indifferent between ... |
7c3bfe13-2099-4f81-8e94-623f6bb024a7 | trentmkelly/LessWrong-43k | LessWrong | Nuclear Preparedness Guide
Author: Finan Adamson
Last Updated 03/2022
Overview
This doc is to help you prepare for the tail risk of nuclear war. Estimates vary, but an EA Forum survey put the annual probability of US-Russia nuclear war at 0.24%. This doc will go into some detail on threat models of nuclear war an... |
40e1e178-d45e-4fcd-a35e-ad968af82137 | trentmkelly/LessWrong-43k | LessWrong | Doors and Corners
This is the second essay in my Death series, where I start to break into the meat of Ernest Becker's theories of psychology and philosophy in the context of human mortality. |
c9d93b64-1077-42b9-a275-0fd05a384145 | trentmkelly/LessWrong-43k | LessWrong | Traps of Formalization in Deconfusion
Introduction
The Depression of Deconfusion
It had made perfect sense to you. It just clicked, and clarified so much. But now you’re doubting again. Suddenly, your argument doesn’t feel so tight. Or maybe you described it to some colleague, who pointed out a weak joint. Or the me... |
4a5fc130-9b39-427e-911c-81448c2b57ab | StampyAI/alignment-research-dataset/lesswrong | LessWrong | Knightian Uncertainty and Ambiguity Aversion: Motivation
Recently, I found myself in a conversation with someone advocating the use of [Knightian uncertainty](http://en.wikipedia.org/wiki/Knightian_uncertainty). I admitted that I've never found the concept compelling. We went back and forth for a little while. His poi... |
05a95744-855c-4a5d-a79b-9036eeb710c5 | trentmkelly/LessWrong-43k | LessWrong | NYC Congestion Pricing: Early Days
People have to pay $9 to enter Manhattan below 60th Street. What happened so far?
TABLE OF CONTENTS
1. Congestion Pricing Comes to NYC.
2. How Much Is Traffic Improving?.
3. And That’s Terrible?.
4. You Mad, Bro.
5. All Aboard.
6. Time is Money.
7. Solving For the Equ... |
c1e15631-730c-4b2f-abbd-275b18cd01a7 | trentmkelly/LessWrong-43k | LessWrong | Higher than the most high
In an earlier post, I talked about how we could deal with variants of the Heaven and Hell problem - situations where you have an infinite number of options, and none of them is a maximum. The solution for a (deterministic) agent was to try and implement the strategy that would reach the highe... |
7b529dea-3227-4e27-895f-3f973ace1f8d | trentmkelly/LessWrong-43k | LessWrong | Perhaps a better form factor for Meetups vs Main board posts?
I like to read posts on "Main" from time to time, including ones that haven't been promoted. However, lately, these posts get drowned out by all the meetup announcements.
It seems like this could lead to a cycle where people comment less on recent non-prom... |
b12b7b4d-9118-42cc-9916-312fafe059e4 | trentmkelly/LessWrong-43k | LessWrong | Goal-directedness: exploring explanations
This is the first post in my Effective-Altruism-funded project aiming to deconfuse goal-directedness. Comments are welcomed. All opinions expressed are my own, and do not reflect the attitudes of any member of the body sponsoring me.
In my preliminary post, I described my bas... |
01ccdaa0-2ccf-401a-9cce-ed449b8912db | LDJnr/LessWrong-Amplify-Instruct | LessWrong | "There’s an essay that periodically feels deeply relevant to a situation:Someday I want to write a self-help book titled “F*k The Karate Kid: Why Life is So Much Harder Than We Think”.Look at any movie with a training montage: The main character is very bad at something, then there is a sequence in the middle of the fi... |
3795c1fb-01ad-4495-bd04-935a5bc4b117 | trentmkelly/LessWrong-43k | LessWrong | Meaningfulness and the scope of experience
I find that the extent to which I find life meaningful, seems strongly influenced by my scope of experience [1, 2].
Say that I have a day off, and there’s nothing in particular that I need to get done or think about. This makes it easy for the spatial scope of my experience ... |
a85f08ac-1fc8-4151-8f71-b4f7eac3af91 | trentmkelly/LessWrong-43k | LessWrong | Self-Congratulatory Rationalism
Quite a few people complain about the atheist/skeptic/rationalist communities being self-congratulatory. I used to dismiss this as a sign of people's unwillingness to admit that rejecting religion, or astrology, or whatever, was any more rational than accepting those things. Lately, tho... |
525b7276-72ff-45af-bc0f-7ab246d398bd | trentmkelly/LessWrong-43k | LessWrong | Refinement of Active Inference agency ontology
[Submitted on 6 Dec 2023]
Active Inference and Intentional Behaviour
Karl J. Friston, Tommaso Salvatori, Takuya Isomura, Alexander Tschantz, Alex Kiefer, Tim Verbelen, Magnus Koudahl, Aswin Paul, Thomas Parr, Adeel Razi, Brett Kagan, Christopher L. Buckley, Maxwell J. D... |
7cb10fc9-5d5e-4421-88ae-09f6b63f1bb9 | trentmkelly/LessWrong-43k | LessWrong | Accidental Electronic Instrument
I've been working on a project with the goal of adding virtual harp strings to my electric mandolin. As I've worked on it, though, I've ended up building something pretty different:
It's not what I was going for! Instead of a small bisonoric monophonic picked instrument attached ... |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.